

详解 hystrix-go 使用与原理

下面由golang教程栏目给大家介绍关于golang封装一个bash函数,用于执行bash命令析,希望对需要的朋友有所帮助!

开篇
这周在看内部一个熔断限流包时,发现它是基于一个开源项目 hystrix-go 实现了,因此有了这篇文章。
Hystrix
Hystrix 是由 Netflex 开发的一款开源组件,提供了基础的熔断功能。 Hystrix 将降级的策略封装在 Command 中,提供了 run 和 fallback 两个方法,前者表示正常的逻辑,比如微服务之间的调用……,如果发生了故障,再执行 fallback方法返回结果,我们可以把它理解成保底操作。如果正常逻辑在短时间内频繁发生故障,那么可能会触发短路,也就是之后的请求不再执行 run,而是直接执行 fallback。更多关于 Hystrix 的信息可以查看 https://github.com/Netflix/Hystrix,而hystrix-go 则是用 go 实现的 hystrix 版,更确切的说,是简化版。只是上一次更新还是 2018年 的一次 pr,也就毕业了?
为什么需要这些工具?
比如一个微服务化的产品线上,每一个服务都专注于自己的业务,并对外提供相应的服务接口,或者依赖于外部服务的某个逻辑接口,就像下面这样。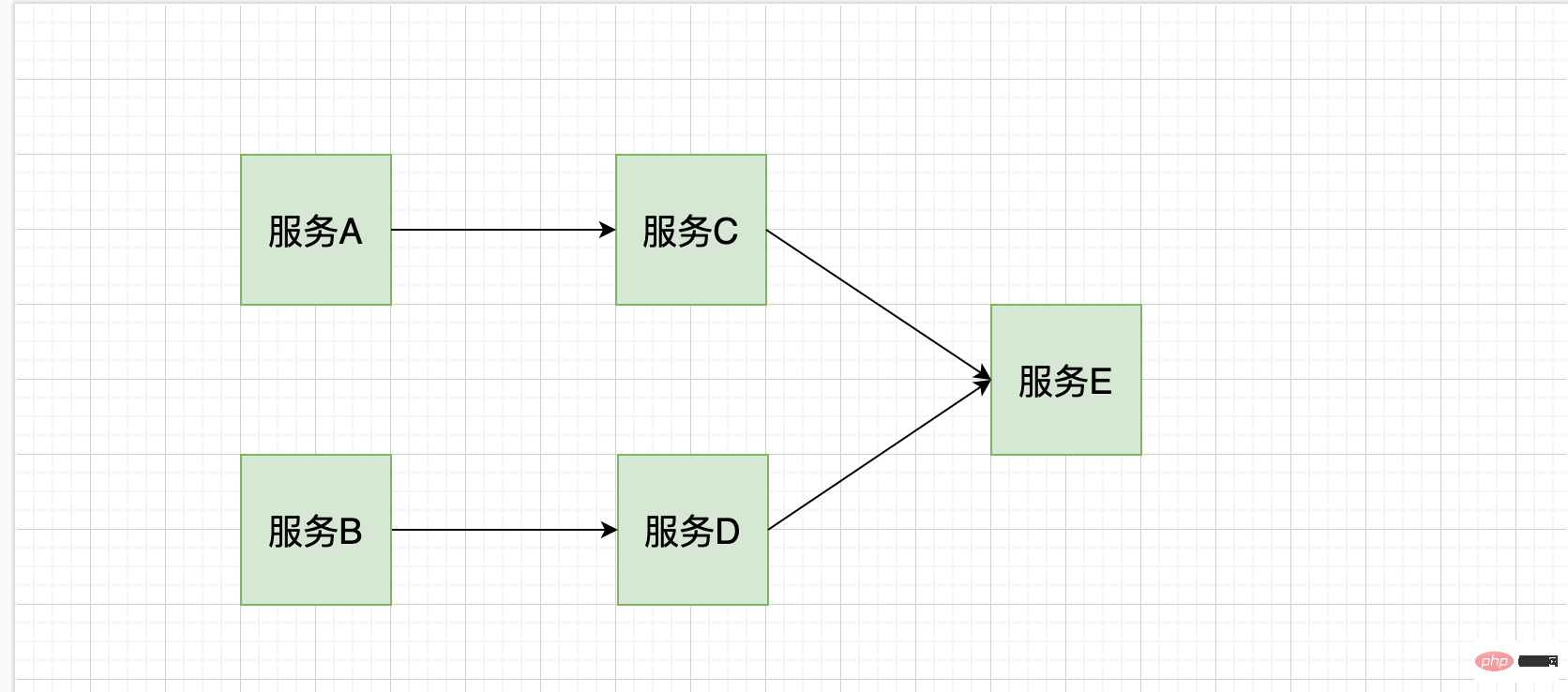
假设我们当前是 服务A,有部分逻辑依赖于 服务C,服务C 又依赖于 服务E,当前微服务之间进行 rpc或者 http通信,假设此时 服务C 调用 服务E 失败,比如由于网络波动导致超时或者服务E由于过载,系统E 已经down掉了。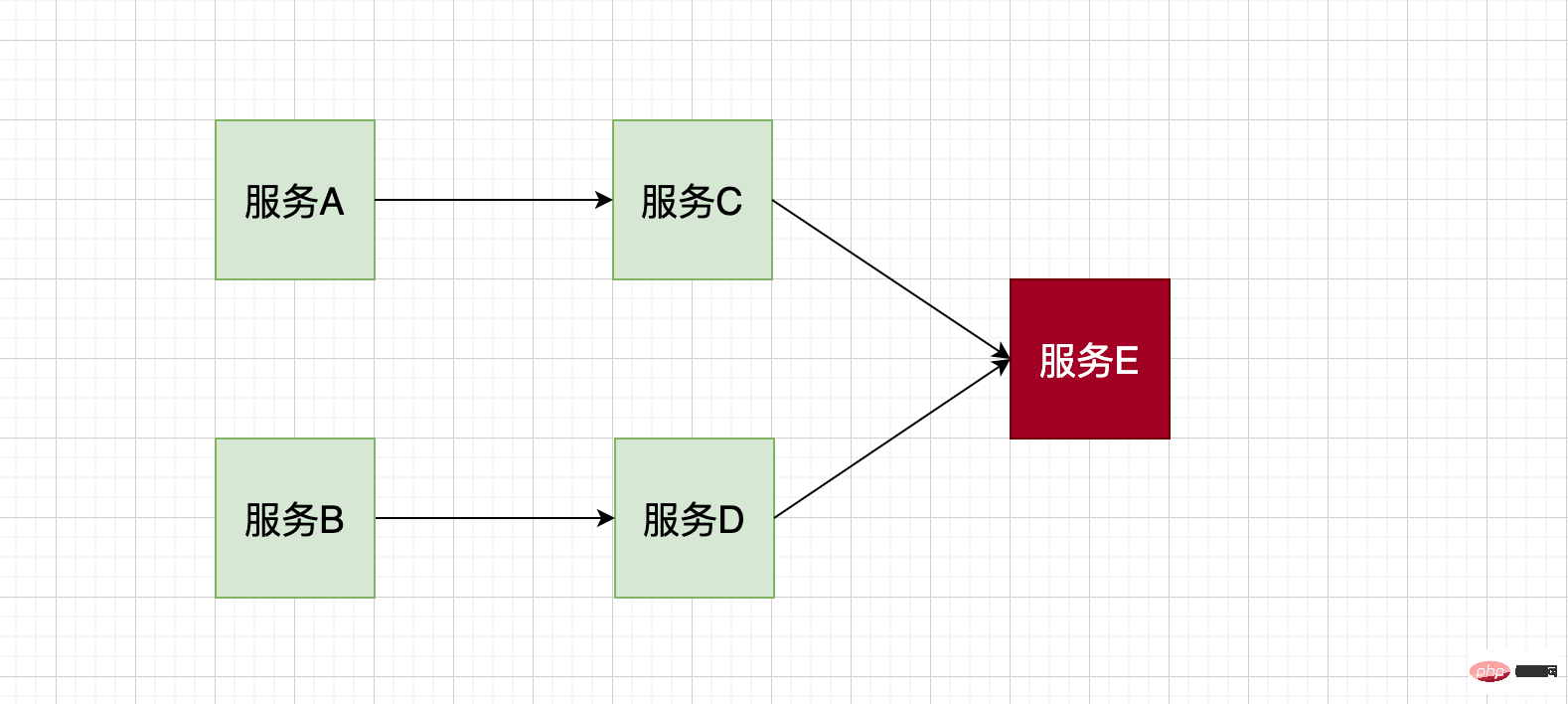
调用失败,一般会有失败重试等机制。但是再想想,假设服务E已然不可用的情况下,此时新的调用不断产生,同时伴随着调用等待和失败重试,会导致 服务C对服务E的调用而产生大量的积压,慢慢会耗尽服务C的资源,进而导致服务C也down掉,这样恶性循环下,会影响到整个微服务体系,产生雪崩效应。
虽然导致雪崩的发生不仅仅这一种,但是我们需要采取一定的措施,来保证不让这个噩梦发生。而 hystrix-go就很好的提供了 熔断和降级的措施。它的主要思想在于,设置一些阀值,比如最大并发数(当并发数大于设置的并发数,拦截),错误率百分比(请求数量大于等于设置 的阀值,并且错误率达到设置的百分比时,触发熔断)以及熔断尝试恢复时间等 。
使用
hystrix-go 的使用非常简单,你可以调用它的 Go 或者 Do方法,只是 Go 方法是异步的方式。而 Do 方法是同步方式。我们从一个简单的例子开启。
_ = hystrix.Do("wuqq", func() error {
// talk to other services
_, err := http.Get("https://www.baidu.com/")
if err != nil {
fmt.Println("get error:%v",err)
return err }
return nil
}, func(err error) error {
fmt.Printf("handle error:%v\n", err)
return nil
})Do 函数需要三个参数,第一个参数 commmand 名称,你可以把每个名称当成一个独立当服务,第二个参数是处理正常的逻辑,比如 http 调用服务,返回参数是 err。如果处理|调用失败,那么就执行第三个参数逻辑, 我们称为保底操作。由于服务错误率过高导致熔断器开启,那么之后的请求也直接回调此函数。
既然熔断器是按照配置的规则而进行是否开启的操作,那么我们当然可以设置我们想要的值。
hystrix.ConfigureCommand("wuqq", hystrix.CommandConfig{
Timeout: int(3 * time.Second),
MaxConcurrentRequests: 10,
SleepWindow: 5000,
RequestVolumeThreshold: 10,
ErrorPercentThreshold: 30,
})
_ = hystrix.Do("wuqq", func() error {
// talk to other services
_, err := http.Get("https://www.baidu.com/")
if err != nil {
fmt.Println("get error:%v",err)
return err }
return nil
}, func(err error) error {
fmt.Printf("handle error:%v\n", err)
return nil
})稍微解释一下上面配置的值含义:
- Timeout: 执行
command的超时时间。 - MaxConcurrentRequests:
command的最大并发量 。 - SleepWindow:当熔断器被打开后,
SleepWindow的时间就是控制过多久后去尝试服务是否可用了。 - RequestVolumeThreshold: 一个统计窗口10秒内请求数量。达到这个请求数量后才去判断是否要开启熔断
- ErrorPercentThreshold:错误百分比,请求数量大于等于
RequestVolumeThreshold并且错误率到达这个百分比后就会启动熔断
当然你不设置的话,那么自动走的默认值。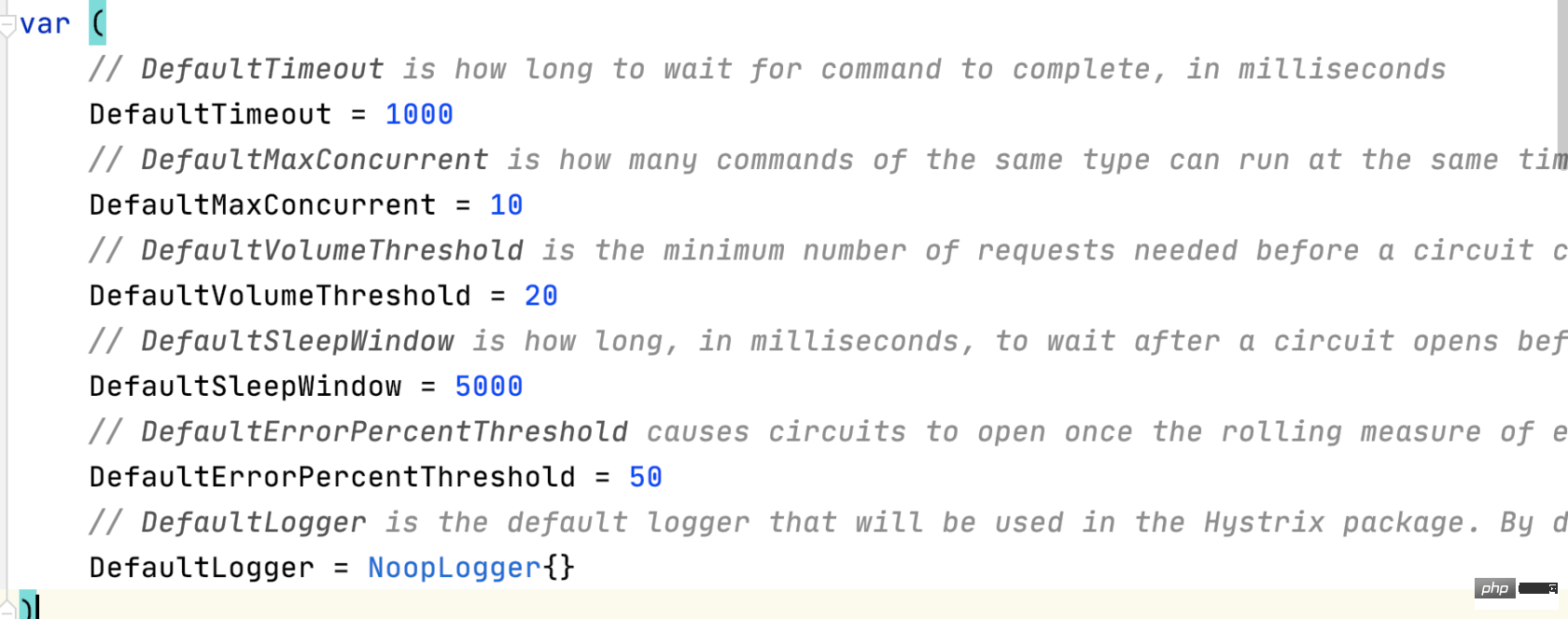
我们再来看一个简单的例子:
package mainimport (
"fmt"
"github.com/afex/hystrix-go/hystrix" "net/http" "time")type Handle struct{}func (h *Handle) ServeHTTP(r http.ResponseWriter, request *http.Request) {
h.Common(r, request)}func (h *Handle) Common(r http.ResponseWriter, request *http.Request) {
hystrix.ConfigureCommand("mycommand", hystrix.CommandConfig{
Timeout: int(3 * time.Second),
MaxConcurrentRequests: 10,
SleepWindow: 5000,
RequestVolumeThreshold: 20,
ErrorPercentThreshold: 30,
})
msg := "success"
_ = hystrix.Do("mycommand", func() error {
_, err := http.Get("https://www.baidu.com")
if err != nil {
fmt.Printf("请求失败:%v", err)
return err }
return nil
}, func(err error) error {
fmt.Printf("handle error:%v\n", err)
msg = "error"
return nil
})
r.Write([]byte(msg))}func main() {
http.ListenAndServe(":8090", &Handle{})}我们开启了一个 http 服务,监听端口号 8090,所有请求的处理逻辑都在 Common 方法中,在这个方法中,我们主要是发起一次 http请求,请求成功响应success,如果失败,响应失败原因。
我们再写另一个简单程序,并发 11 次的请求 8090 端口。
package mainimport (
"fmt"
"io/ioutil"
"net/http"
"sync"
"time")var client *http.Clientfunc init() {
tr := &http.Transport{
MaxIdleConns: 100,
IdleConnTimeout: 1 * time.Second,
}
client = &http.Client{Transport: tr}}type info struct {
Data interface{} `json:"data"`}func main() {
var wg sync.WaitGroup for i := 0; i < 11; i++ {
wg.Add(1)
go func(int2 int) {
defer wg.Done()
req, err := http.NewRequest("GET", "http://localhost:8090", nil)
if err != nil {
fmt.Printf("初始化http客户端处错误:%v", err)
return
}
resp, err := client.Do(req)
if err != nil {
fmt.Printf("初始化http客户端处错误:%v", err)
return
}
defer resp.Body.Close()
nByte, err := ioutil.ReadAll(resp.Body)
if err != nil {
fmt.Printf("读取http数据失败:%v", err)
return
}
fmt.Printf("接收到到值:%v\n", string(nByte))
}(i)
}
wg.Wait()
fmt.Printf("请求完毕\n")}由于我们配置 MaxConcurrentRequests 为10,那么意味着还有个 g 请求会失败: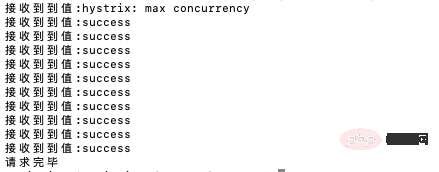
和我们想的一样。
接着我们把网络断开,并发请求改成10次。再次运行程序并发请求 8090 端口,此时由于网络已关闭,导致请求百度失败: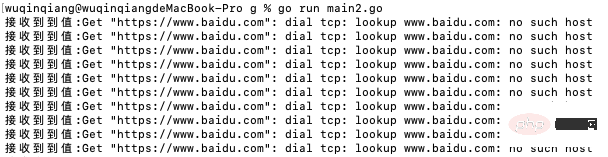
接着继续请求: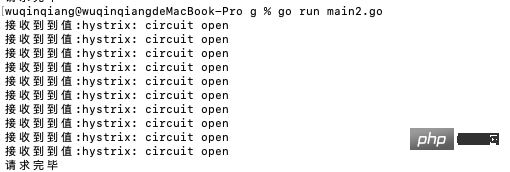
熔断器已开启,上面我们配置的RequestVolumeThreshold 和 ErrorPercentThreshold 生效。
然后我们把网连上,五秒后 (SleepWindow的值)继续并发调用,当前熔断器处于半开的状态,此时请求允许调用依赖,如果成功则关闭,失败则继续开启熔断器。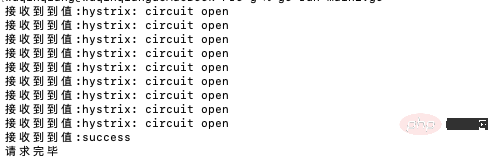
可以看到,有一个成功了,那么此时熔断器已关闭,接下来继续运行函数并发调用: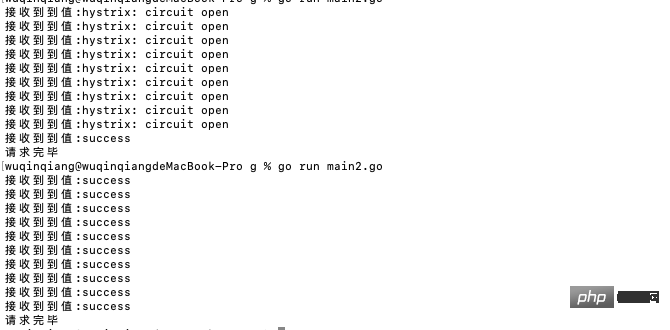
可以看到,10个都已经是正常成功的状态了。
那么问题来了,为什么最上面的图只有一个是成功的?5秒已经过了,并且当前网络正常,应该是10个请求都成功,但是我们看到的只有一个是成功状态。通过源码我们可以找到答案:
具体逻辑在判断当前请求是否可以调用依赖
if !cmd.circuit.AllowRequest() {
......
return
}func (circuit *CircuitBreaker) AllowRequest() bool {
return !circuit.IsOpen() || circuit.allowSingleTest()}func (circuit *CircuitBreaker) allowSingleTest() bool {
circuit.mutex.RLock()
defer circuit.mutex.RUnlock()
now := time.Now().UnixNano()
openedOrLastTestedTime := atomic.LoadInt64(&circuit.openedOrLastTestedTime)
if circuit.open && now > openedOrLastTestedTime+getSettings(circuit.Name).SleepWindow.Nanoseconds() {
/
swapped := atomic.CompareAndSwapInt64(&circuit.openedOrLastTestedTime, openedOrLastTestedTime, now) //这一句才是关键
if swapped {
log.Printf("hystrix-go: allowing single test to possibly close circuit %v", circuit.Name)
}
return swapped }
return false}这段代码首先判断了熔断器是否开启,并且当前时间大于 上一次开启熔断器的时间+ SleepWindow 的时间,如果条件都符合的话,更新此熔断器最新的 openedOrLastTestedTime ,是通过 CompareAndSwapInt64 原子操作完成的,意外着必然只会有一个成功。
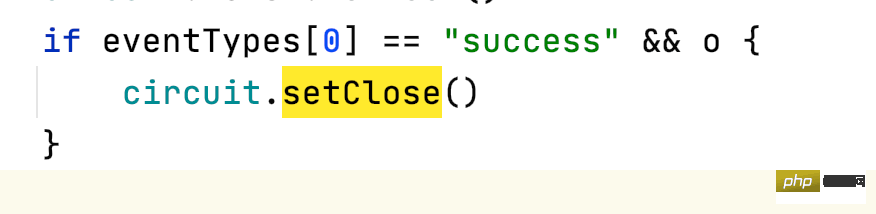
此时熔断器还是半开的状态,接着如果能拿到令牌,执行run 函数(也就是Do传入的第二个简单封装后的函数),发起 http 请求,如果成功,上报成功状态,关闭熔断器。如果失败,那么熔断器依旧开启。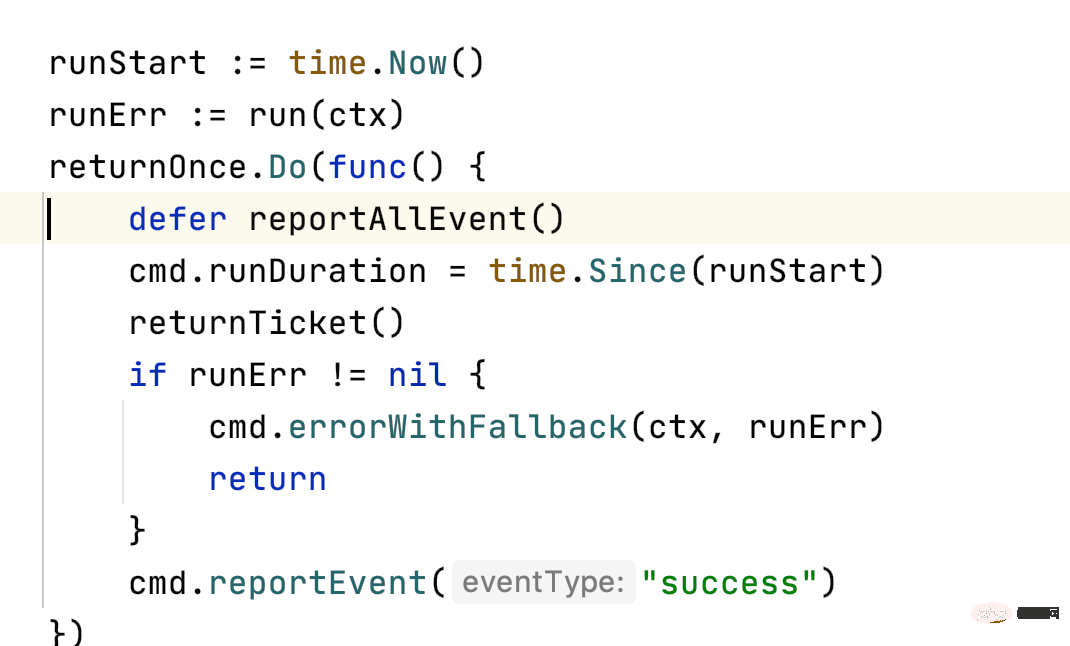
以上就是大体的流程讲解,下一篇文章将解读核心源码以及进一步当思考。
更多相关技术文章,请访问go语言教程栏目!
Atas ialah kandungan terperinci 详解 hystrix-go 使用与原理. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

AI Hentai Generator
Menjana ai hentai secara percuma.

Artikel Panas
Alat panas

Notepad++7.3.1
Editor kod yang mudah digunakan dan percuma

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

Hantar Studio 13.0.1
Persekitaran pembangunan bersepadu PHP yang berkuasa

Dreamweaver CS6
Alat pembangunan web visual

SublimeText3 versi Mac
Perisian penyuntingan kod peringkat Tuhan (SublimeText3)
Topik panas
 1378
1378
 52
52

 Bagaimana untuk membaca dan menulis fail dengan selamat menggunakan Golang?
Jun 06, 2024 pm 05:14 PM
Bagaimana untuk membaca dan menulis fail dengan selamat menggunakan Golang?
Jun 06, 2024 pm 05:14 PM
Membaca dan menulis fail dengan selamat dalam Go adalah penting. Garis panduan termasuk: Menyemak kebenaran fail Menutup fail menggunakan tangguh Mengesahkan laluan fail Menggunakan tamat masa konteks Mengikuti garis panduan ini memastikan keselamatan data anda dan keteguhan aplikasi anda.
 Bagaimana untuk mengkonfigurasi kolam sambungan untuk sambungan pangkalan data Golang?
Jun 06, 2024 am 11:21 AM
Bagaimana untuk mengkonfigurasi kolam sambungan untuk sambungan pangkalan data Golang?
Jun 06, 2024 am 11:21 AM
Bagaimana untuk mengkonfigurasi pengumpulan sambungan untuk sambungan pangkalan data Go? Gunakan jenis DB dalam pakej pangkalan data/sql untuk membuat sambungan pangkalan data untuk mengawal bilangan maksimum sambungan serentak;
 Bagaimana untuk menggunakan gomega untuk penegasan dalam ujian unit Golang?
Jun 05, 2024 pm 10:48 PM
Bagaimana untuk menggunakan gomega untuk penegasan dalam ujian unit Golang?
Jun 05, 2024 pm 10:48 PM
Cara menggunakan Gomega untuk penegasan dalam ujian unit Golang Dalam ujian unit Golang, Gomega ialah perpustakaan penegasan yang popular dan berkuasa yang menyediakan kaedah penegasan yang kaya supaya pembangun boleh mengesahkan keputusan ujian dengan mudah. Pasang Gomegagoget-ugithub.com/onsi/gomega Menggunakan Gomega untuk penegasan Berikut ialah beberapa contoh biasa menggunakan Gomega untuk penegasan: 1. Import penegasan kesamaan "github.com/onsi/gomega" funcTest_MyFunction(t*testing.T){
 Rangka Kerja Golang lwn Rangka Kerja Go: Perbandingan Seni Bina Dalaman dan Ciri Luaran
Jun 06, 2024 pm 12:37 PM
Rangka Kerja Golang lwn Rangka Kerja Go: Perbandingan Seni Bina Dalaman dan Ciri Luaran
Jun 06, 2024 pm 12:37 PM
Perbezaan antara rangka kerja GoLang dan rangka kerja Go ditunjukkan dalam seni bina dalaman dan ciri luaran. Rangka kerja GoLang adalah berdasarkan perpustakaan standard Go dan meluaskan fungsinya, manakala rangka kerja Go terdiri daripada perpustakaan bebas untuk mencapai tujuan tertentu. Rangka kerja GoLang lebih fleksibel dan rangka kerja Go lebih mudah digunakan. Rangka kerja GoLang mempunyai sedikit kelebihan dalam prestasi dan rangka kerja Go lebih berskala. Kes: gin-gonic (rangka Go) digunakan untuk membina REST API, manakala Echo (rangka kerja GoLang) digunakan untuk membina aplikasi web.
 Bagaimana untuk menyimpan data JSON ke pangkalan data di Golang?
Jun 06, 2024 am 11:24 AM
Bagaimana untuk menyimpan data JSON ke pangkalan data di Golang?
Jun 06, 2024 am 11:24 AM
Data JSON boleh disimpan ke dalam pangkalan data MySQL dengan menggunakan perpustakaan gjson atau fungsi json.Unmarshal. Pustaka gjson menyediakan kaedah kemudahan untuk menghuraikan medan JSON dan fungsi json.Unmarshal memerlukan penuding jenis sasaran kepada data JSON unmarshal. Kedua-dua kaedah memerlukan penyediaan pernyataan SQL dan melaksanakan operasi sisipan untuk mengekalkan data ke dalam pangkalan data.
 Apakah amalan terbaik untuk pengendalian ralat dalam rangka kerja Golang?
Jun 05, 2024 pm 10:39 PM
Apakah amalan terbaik untuk pengendalian ralat dalam rangka kerja Golang?
Jun 05, 2024 pm 10:39 PM
Amalan terbaik: Cipta ralat tersuai menggunakan jenis ralat yang ditakrifkan dengan baik (pakej ralat) Sediakan lebih banyak butiran Log ralat dengan sewajarnya Sebarkan ralat dengan betul dan elakkan menyembunyikan atau menyekat ralat Balut seperti yang diperlukan untuk menambah konteks
 Bagaimana untuk mencari subrentetan pertama dipadankan dengan ungkapan biasa Golang?
Jun 06, 2024 am 10:51 AM
Bagaimana untuk mencari subrentetan pertama dipadankan dengan ungkapan biasa Golang?
Jun 06, 2024 am 10:51 AM
Fungsi FindStringSubmatch mencari subrentetan pertama dipadankan dengan ungkapan biasa: fungsi mengembalikan hirisan yang mengandungi subrentetan yang sepadan, dengan elemen pertama ialah keseluruhan rentetan dipadankan dan elemen berikutnya ialah subrentetan individu. Contoh kod: regexp.FindStringSubmatch(teks,corak) mengembalikan sekeping subrentetan yang sepadan. Kes praktikal: Ia boleh digunakan untuk memadankan nama domain dalam alamat e-mel, contohnya: e-mel:="user@example.com", pattern:=@([^\s]+)$ untuk mendapatkan padanan nama domain [1].
 Berubah dari front-end ke pembangunan back-end, adakah lebih menjanjikan untuk belajar Java atau Golang?
Apr 02, 2025 am 09:12 AM
Berubah dari front-end ke pembangunan back-end, adakah lebih menjanjikan untuk belajar Java atau Golang?
Apr 02, 2025 am 09:12 AM
Laluan Pembelajaran Backend: Perjalanan Eksplorasi dari Front-End ke Back-End sebagai pemula back-end yang berubah dari pembangunan front-end, anda sudah mempunyai asas Nodejs, ...
