
 Peranti teknologi
AI
Set data dan persepsi memandu dalam keadaan cuaca yang berulang dan mencabar
Peranti teknologi
AI
Set data dan persepsi memandu dalam keadaan cuaca yang berulang dan mencabar
Set data dan persepsi memandu dalam keadaan cuaca yang berulang dan mencabar

Kertas arXiv "Ithaca365: Set Data dan Persepsi Memandu di bawah Keadaan Cuaca Berulang dan Mencabar", dimuat naik pada 1, 22 Ogos, adalah hasil kerja universiti Cornell dan Ohio State.
Dalam beberapa tahun kebelakangan ini, keupayaan persepsi kenderaan autonomi telah bertambah baik disebabkan penggunaan set data berskala besar, yang sering dikumpulkan di lokasi tertentu dan dalam keadaan cuaca yang baik. . Walau bagaimanapun, untuk memenuhi keperluan keselamatan yang tinggi, sistem penderiaan ini mesti beroperasi dengan teguh dalam pelbagai keadaan cuaca, termasuk keadaan salji dan hujan.
Artikel ini mencadangkan set data untuk mencapai pemanduan autonomi yang mantap, menggunakan proses pengumpulan data baharu, iaitu, dalam senario yang berbeza (bandar, lebuh raya, kawasan luar bandar, kampus), cuaca (salji, hujan, matahari) , masa Data direkodkan berulang kali sepanjang laluan 15 km di bawah (siang/malam) dan keadaan lalu lintas (pejalan kaki, penunggang basikal dan kereta).
Dataset termasuk imej dan awan titik daripada kamera dan penderia lidar, serta GPS/INS berketepatan tinggi untuk mewujudkan surat-menyurat merentas laluan. Set data termasuk anotasi jalan dan objek, oklusi setempat dan kotak sempadan 3-D yang ditangkap dengan topeng amodal.
Laluan berulang membuka arah penyelidikan baharu untuk penemuan sasaran, pembelajaran berterusan dan pengesanan anomali.
Pautan Ithaca365: Set data baharu untuk membolehkan pemanduan autonomi yang mantap melalui proses pengumpulan data baharu
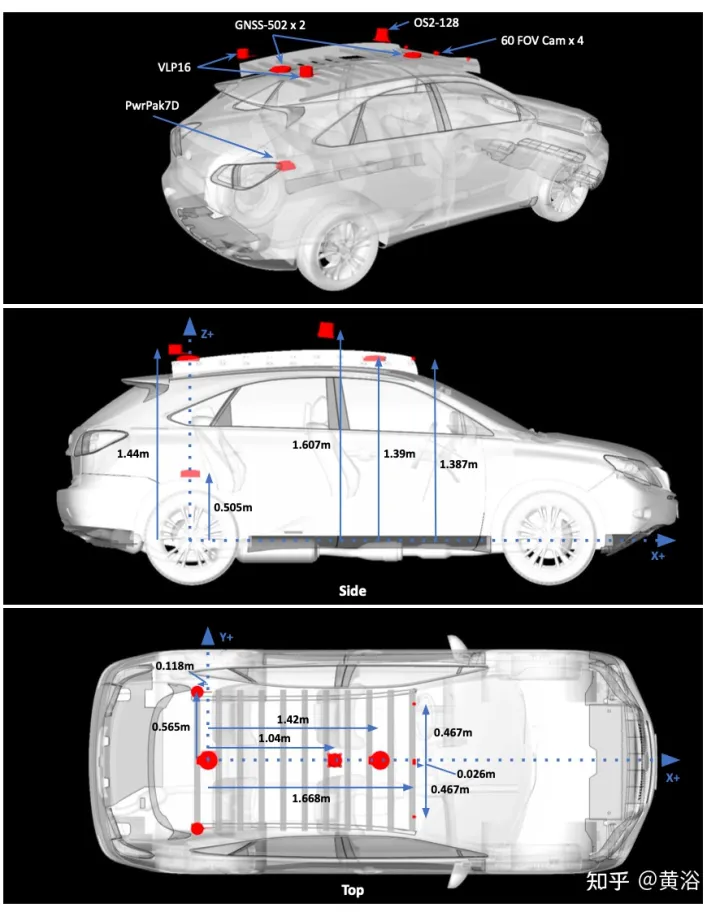
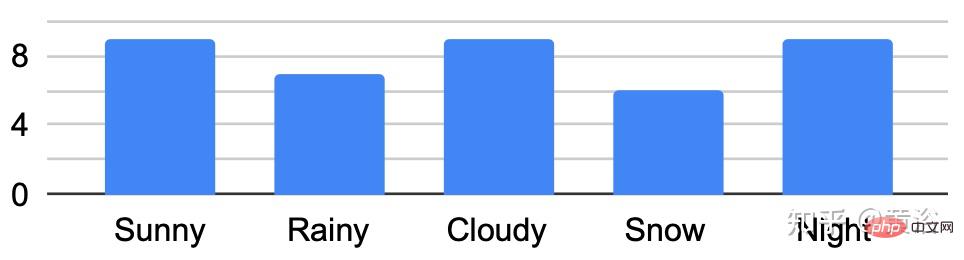
Gambar menunjukkan konfigurasi penderia pengumpulan data:
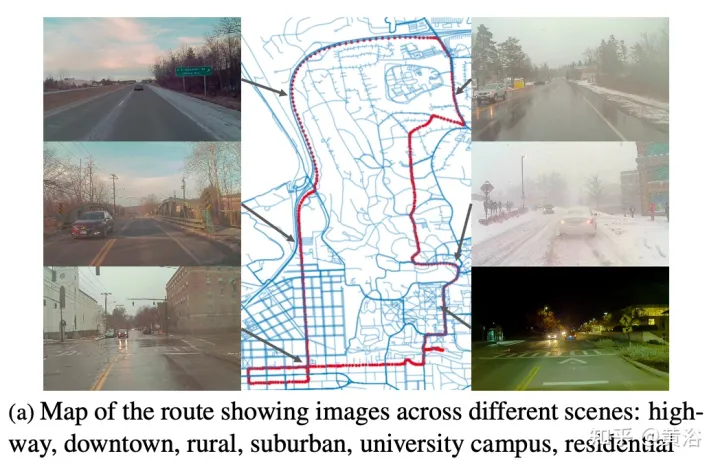
Rajah a menunjukkan peta laluan dengan imej yang ditangkap di berbilang lokasi. Pemacu dijadualkan untuk mengumpul data pada masa yang berbeza dalam sehari, termasuk pada waktu malam. Catatkan keadaan salji tebal sebelum dan selepas pembersihan jalan.
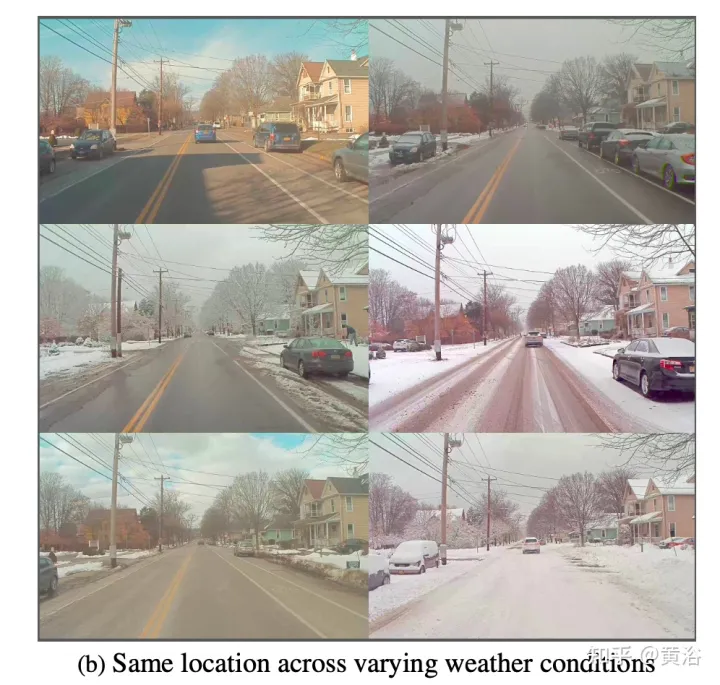
Ciri utama set data ialah lokasi yang sama boleh diperhatikan dalam keadaan yang berbeza; contoh ditunjukkan dalam Rajah b.
Rajah menunjukkan analisis traversal dalam keadaan berbeza:
Membangunkan alat penanda tersuai, digunakan untuk mendapatkan topeng amodal jalan dan objek. Untuk label jalan di bawah keadaan persekitaran yang berbeza, seperti jalan yang dilitupi salji, gunakan laluan berulang pada laluan yang sama. Secara khusus, peta jalan awan titik yang dibina daripada data sikap GPS dan lidar menukar label jalan "cuaca baik" kepada "cuaca buruk".
Laluan/data dibahagikan kepada 76 selang. Unjurkan awan titik ke dalam BEV dan labelkan jalan menggunakan anotasi poligon. Setelah jalan ditandakan dalam BEV (menjana sempadan jalan 2-D), poligon diuraikan kepada poligon 150 m^2 yang lebih kecil, menggunakan ambang ketinggian purata 1.5 m, dan padanan satah dilakukan pada titik dalam poligon. sempadan untuk menentukan ketinggian jalan.
Gunakan RANSAC dan regressor untuk memuatkan satah ke titik ini kemudian gunakan anggaran satah tanah untuk mengira ketinggian setiap titik di sepanjang sempadan. Unjurkan titik jalan ke dalam imej dan cipta topeng kedalaman untuk mendapatkan label bukan modal jalan. Memadankan lokasi dengan peta bertanda dengan GPS dan mengoptimumkan laluan dengan ICP membolehkan satah darat diunjurkan ke lokasi tertentu pada laluan pengumpulan baharu.
Lakukan semakan akhir pada penyelesaian ICP dengan mengesahkan bahawa purata topeng kebenaran tanah yang diunjurkan bagi label jalan sepadan dengan 80% mIOU dengan semua topeng kebenaran tanah yang lain di lokasi yang sama, jika tidak, tanya data lokasi tidak boleh diambil semula.
Sasaran bukan modal dilabelkan dengan Skala AI untuk enam kategori sasaran latar depan: kereta, bas, trak (termasuk kargo, trak bomba, trak pikap, ambulans), pejalan kaki, penunggang basikal dan penunggang motosikal.
Paradigma pelabelan ini mempunyai tiga komponen utama: mula-mula mengenal pasti tika objek yang boleh dilihat, kemudian membuat kesimpulan topeng segmentasi tika tersumbat, dan akhirnya melabelkan susunan oklusi setiap objek. Penandaan dilakukan pada paparan kamera paling kiri ke hadapan. Mengikuti piawaian yang sama seperti KINS ("Segmentasi contoh amodal dengan dataset kins". CVPR, 2019).
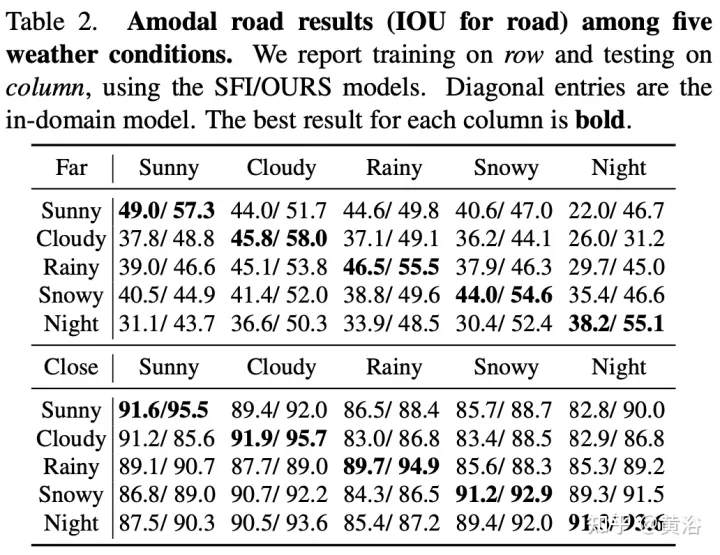
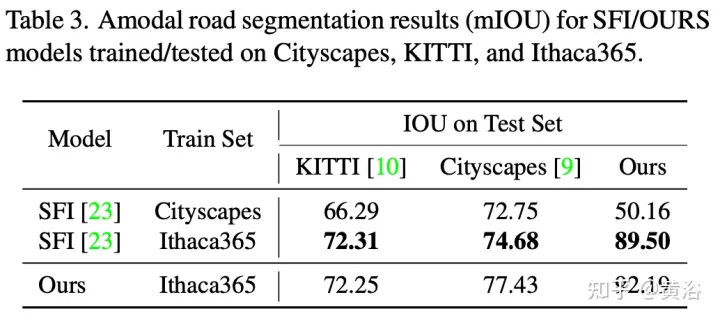
Untuk menunjukkan kepelbagaian alam sekitar dan kualiti amodal set data, dua rangkaian garis dasar telah dilatih dan diuji untuk mengenal pasti jalan amodal pada tahap piksel, berfungsi walaupun ketika jalan dilitupi salji atau kereta. Rangkaian asas pertama ialah Semantic Foreground Inpainting (SFI). Garis asas kedua, seperti yang ditunjukkan dalam rajah, menggunakan tiga inovasi berikut untuk menambah baik SFI.
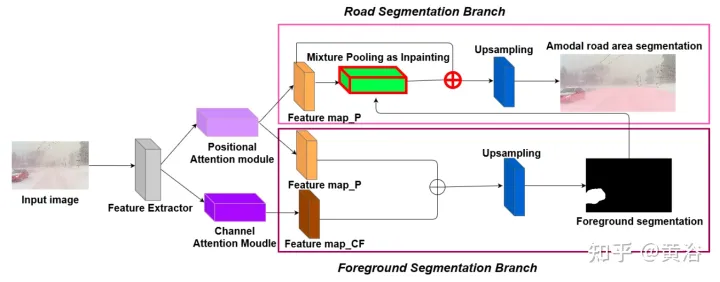
- Kedudukan dan Saluran Nota: Oleh kerana pembahagian amodal terutamanya menyimpulkan perkara yang tidak kelihatan, konteks ialah petunjuk yang sangat penting. DAN (“Rangkaian perhatian dwi untuk pembahagian pemandangan“, CVPR’2019) memperkenalkan dua inovasi untuk menangkap dua latar belakang berbeza. Modul Perhatian Kedudukan (PAM) menggunakan ciri piksel untuk memfokus pada piksel imej yang lain, sebenarnya menangkap konteks daripada bahagian lain imej. Modul Perhatian Saluran (CAM) menggunakan mekanisme perhatian yang serupa untuk mengagregatkan maklumat saluran dengan cekap. Di sini kedua-dua modul ini digunakan pada pengekstrak ciri tulang belakang. Menggabungkan CAM dan PAM untuk penyetempatan sempadan topeng halus yang lebih baik. Topeng contoh latar depan terakhir diperoleh melalui lapisan pensampelan naik.
- Pengumpulan hibrid sebagai pengecatan: Pengumpulan maksimum digunakan sebagai operasi menampal untuk menggantikan ciri latar depan bertindih dengan ciri latar belakang berdekatan untuk membantu memulihkan ciri jalan bukan modal. Walau bagaimanapun, oleh kerana ciri latar belakang biasanya diedarkan dengan lancar, operasi pengumpulan maksimum adalah sangat sensitif kepada sebarang bunyi tambahan. Sebaliknya, operasi pengumpulan purata secara semulajadi mengurangkan bunyi bising. Untuk tujuan ini, pengumpulan purata dan pengumpulan maksimum digabungkan untuk menampal, yang dipanggil Penggabungan Campuran.
- Kendalian penjumlahan: Sebelum lapisan pensampelan naik terakhir, ciri daripada modul pengumpulan hibrid tidak diluluskan secara langsung, tetapi pautan baki daripada output modul PAM disertakan. Dengan mengoptimumkan dua peta ciri secara bersama dalam cawangan pembahagian jalan, modul PAM juga boleh mempelajari ciri latar belakang kawasan tersumbat. Ini boleh membawa kepada pemulihan ciri latar belakang yang lebih tepat.
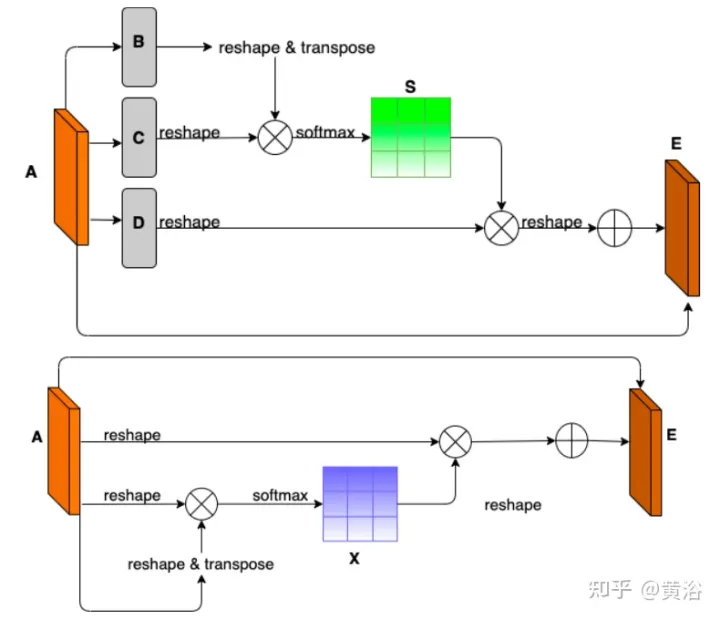
Gambar menunjukkan gambar rajah seni bina PAM dan CAM:
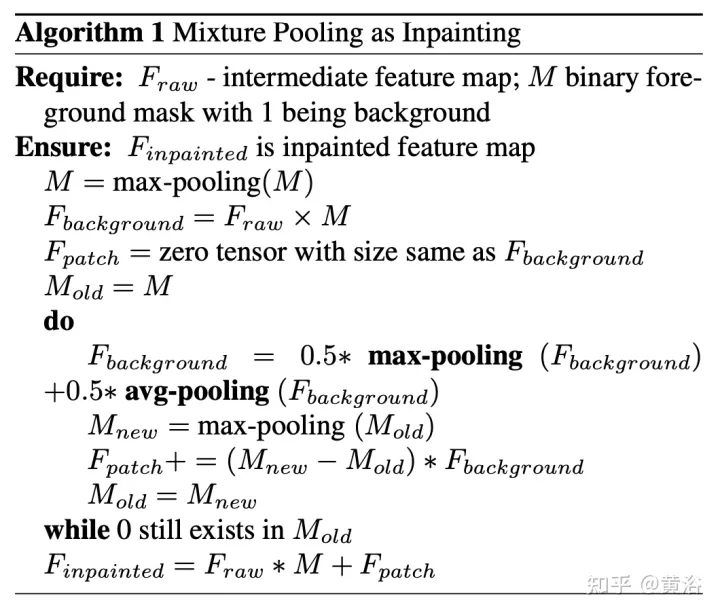
Kod pseudo algoritma tampalan pengumpulan hibrid adalah seperti berikut:
Kod latihan dan ujian untuk pembahagian jalan bukan mod adalah seperti berikut: https://github. com/coolgrasshopper/amodal_road_segmentation
Keputusan percubaan adalah seperti berikut:
Atas ialah kandungan terperinci Set data dan persepsi memandu dalam keadaan cuaca yang berulang dan mencabar. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

AI Hentai Generator
Menjana ai hentai secara percuma.

Artikel Panas
Alat panas

Notepad++7.3.1
Editor kod yang mudah digunakan dan percuma

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

Hantar Studio 13.0.1
Persekitaran pembangunan bersepadu PHP yang berkuasa

Dreamweaver CS6
Alat pembangunan web visual

SublimeText3 versi Mac
Perisian penyuntingan kod peringkat Tuhan (SublimeText3)
Topik panas
 1377
1377
 52
52

 Kawalan Apl Pintar pada Windows 11: Cara menghidupkan atau mematikannya
Jun 06, 2023 pm 11:10 PM
Kawalan Apl Pintar pada Windows 11: Cara menghidupkan atau mematikannya
Jun 06, 2023 pm 11:10 PM
Kawalan Apl Pintar ialah alat yang sangat berguna dalam Windows 11 yang membantu melindungi PC anda daripada apl tidak dibenarkan yang boleh merosakkan data anda, seperti perisian tebusan atau perisian intip. Artikel ini menerangkan maksud Kawalan Aplikasi Pintar, cara ia berfungsi dan cara menghidupkan atau mematikannya dalam Windows 11. Apakah Kawalan Aplikasi Pintar dalam Windows 11? Kawalan Aplikasi Pintar (SAC) ialah ciri keselamatan baharu yang diperkenalkan dalam kemas kini Windows 1122H2. Ia berfungsi dengan Microsoft Defender atau perisian antivirus pihak ketiga untuk menyekat apl yang mungkin tidak diperlukan yang boleh memperlahankan peranti anda, memaparkan iklan yang tidak dijangka atau melakukan tindakan lain yang tidak dijangka. Aplikasi pintar
 Ciri-ciri wajah berterbangan, mulut terbuka, mata terbuka, dan kening terangkat AI boleh menirunya dengan sempurna Penipuan video adalah mustahil untuk dicegah.
Dec 14, 2023 pm 11:30 PM
Ciri-ciri wajah berterbangan, mulut terbuka, mata terbuka, dan kening terangkat AI boleh menirunya dengan sempurna Penipuan video adalah mustahil untuk dicegah.
Dec 14, 2023 pm 11:30 PM
Dengan kebolehan tiruan AI yang begitu kuat, ia benar-benar mustahil untuk menghalangnya, sama sekali mustahil untuk menghalangnya. Adakah pembangunan AI mencapai tahap ini sekarang? Kaki hadapan anda membuat ciri-ciri wajah anda terbang, dan pada kaki belakang anda, ekspresi yang sama direproduksi Menatap, mengangkat kening, mencebik, tidak kira betapa berlebihan ekspresi itu, semuanya ditiru dengan sempurna. Tingkatkan kesukaran, angkat kening lebih tinggi, buka mata lebih luas, malah bentuk mulutnya bengkok, dan avatar watak maya dapat menghasilkan semula ekspresi dengan sempurna. Apabila anda melaraskan parameter di sebelah kiri, avatar maya di sebelah kanan juga akan menukar pergerakannya dengan sewajarnya untuk memberikan gambaran dekat mulut dan mata Tiruan itu tidak boleh dikatakan sama, tetapi ungkapan itu betul-betul sama (paling kanan). Penyelidikan ini datang dari institusi seperti Universiti Teknikal Munich, yang mencadangkan GaussianAvatars, yang
 MotionLM: Teknologi pemodelan bahasa untuk ramalan gerakan berbilang ejen
Oct 13, 2023 pm 12:09 PM
MotionLM: Teknologi pemodelan bahasa untuk ramalan gerakan berbilang ejen
Oct 13, 2023 pm 12:09 PM
Artikel ini dicetak semula dengan kebenaran daripada akaun awam Autonomous Driving Heart. Sila hubungi sumber untuk mencetak semula. Tajuk asal: MotionLM: Multi-Agent Motion Forecasting as Language Modelling Paper pautan: https://arxiv.org/pdf/2309.16534.pdf Gabungan pengarang: Waymo Conference: ICCV2023 Idea kertas: Untuk perancangan keselamatan kenderaan autonomi, ramalkan tingkah laku masa hadapan dengan pasti ejen jalan raya adalah penting. Kajian ini mewakili trajektori berterusan sebagai jujukan token gerakan diskret dan menganggap ramalan gerakan berbilang agen sebagai tugas pemodelan bahasa. Model yang kami cadangkan, MotionLM, mempunyai kelebihan berikut: Pertama
 Untuk menyediakan tanda aras dan sistem penilaian menjawab soalan saintifik dan kompleks baharu untuk model besar, UNSW, Argonne, University of Chicago dan institusi lain bersama-sama melancarkan rangka kerja SciQAG
Jul 25, 2024 am 06:42 AM
Untuk menyediakan tanda aras dan sistem penilaian menjawab soalan saintifik dan kompleks baharu untuk model besar, UNSW, Argonne, University of Chicago dan institusi lain bersama-sama melancarkan rangka kerja SciQAG
Jul 25, 2024 am 06:42 AM
Editor |ScienceAI Question Answering (QA) set data memainkan peranan penting dalam mempromosikan penyelidikan pemprosesan bahasa semula jadi (NLP). Set data QA berkualiti tinggi bukan sahaja boleh digunakan untuk memperhalusi model, tetapi juga menilai dengan berkesan keupayaan model bahasa besar (LLM), terutamanya keupayaan untuk memahami dan menaakul tentang pengetahuan saintifik. Walaupun pada masa ini terdapat banyak set data QA saintifik yang meliputi bidang perubatan, kimia, biologi dan bidang lain, set data ini masih mempunyai beberapa kekurangan. Pertama, borang data adalah agak mudah, kebanyakannya adalah soalan aneka pilihan. Ia mudah dinilai, tetapi mengehadkan julat pemilihan jawapan model dan tidak dapat menguji sepenuhnya keupayaan model untuk menjawab soalan saintifik. Sebaliknya, Soal Jawab terbuka
 Adakah anda tahu bahawa pengaturcara akan merosot dalam beberapa tahun?
Nov 08, 2023 am 11:17 AM
Adakah anda tahu bahawa pengaturcara akan merosot dalam beberapa tahun?
Nov 08, 2023 am 11:17 AM
Majalah "ComputerWorld" pernah menulis artikel yang mengatakan bahawa "pengaturcaraan akan hilang menjelang 1960" kerana IBM membangunkan bahasa baharu FORTRAN, yang membolehkan jurutera menulis formula matematik yang mereka perlukan dan kemudian menyerahkannya kepada komputer, jadi pengaturcaraan tamat. Beberapa tahun kemudian, kami mendengar pepatah baru: mana-mana ahli perniagaan boleh menggunakan istilah perniagaan untuk menerangkan masalah mereka dan memberitahu komputer apa yang perlu dilakukan Menggunakan bahasa pengaturcaraan yang dipanggil COBOL ini, syarikat tidak lagi memerlukan pengaturcara. Kemudian, dikatakan bahawa IBM membangunkan bahasa pengaturcaraan baharu yang dipanggil RPG yang membolehkan pekerja mengisi borang dan menjana laporan, jadi kebanyakan keperluan pengaturcaraan syarikat dapat diselesaikan melaluinya.
 Melaksanakan OpenAI CLIP pada set data tersuai
Sep 14, 2023 am 11:57 AM
Melaksanakan OpenAI CLIP pada set data tersuai
Sep 14, 2023 am 11:57 AM
Pada Januari 2021, OpenAI mengumumkan dua model baharu: DALL-E dan CLIP. Kedua-dua model ialah model multimodal yang menyambungkan teks dan imej dalam beberapa cara. Nama penuh CLIP ialah Pra-latihan Bahasa-Imej Kontrastif (ContrastiveLanguage-Image-Pre-training), yang merupakan kaedah pra-latihan berdasarkan pasangan imej teks yang berbeza. Mengapa memperkenalkan CLIP? Kerana StableDiffusion yang popular pada masa ini bukanlah satu model, tetapi terdiri daripada berbilang model. Salah satu komponen utama ialah pengekod teks, yang digunakan untuk mengekod input teks pengguna ini ialah pengekod teks CL dalam model CLIP.
 Robot Humanoid Universal Pintar Fourier GR-1 akan memulakan pra-jualan!
Sep 27, 2023 pm 08:41 PM
Robot Humanoid Universal Pintar Fourier GR-1 akan memulakan pra-jualan!
Sep 27, 2023 pm 08:41 PM
Robot humanoid, yang berketinggian 1.65 meter, beratnya 55 kilogram dan mempunyai 44 darjah kebebasan dalam badannya, boleh berjalan dengan cepat, mengelak halangan dengan cepat, memanjat cerun naik dan turun secara berterusan, dan menahan hentaman dan gangguan Anda kini boleh membawanya pulang ! Robot humanoid universal Fourier Intelligence GR-1 telah memulakan pra-jualan Dewan Kuliah Robot Robot humanoid universal Fourier GR-1 Fourier Intelligence kini telah dibuka untuk pra-jualan. GR-1 mempunyai konfigurasi batang yang sangat bionik dan kawalan pergerakan antropomorfik Ia mempunyai 44 darjah kebebasan di seluruh badan Ia mempunyai keupayaan untuk berjalan, mengelakkan halangan, memanjat halangan, naik dan turun cerun, menentang gangguan, dan menyesuaikan diri. ke permukaan jalan yang berbeza Ia adalah sistem kecerdasan buatan umum. Halaman pra-jualan tapak web rasmi: www.fftai.cn/order#FourierGR-1# Fourier Intelligence perlu ditulis semula.
 Apakah kaedah yang berkesan dan kaedah Pangkalan biasa untuk ramalan trajektori pejalan kaki? Perkongsian kertas persidangan teratas!
Oct 17, 2023 am 11:13 AM
Apakah kaedah yang berkesan dan kaedah Pangkalan biasa untuk ramalan trajektori pejalan kaki? Perkongsian kertas persidangan teratas!
Oct 17, 2023 am 11:13 AM
Ramalan trajektori telah mendapat momentum dalam tempoh dua tahun yang lalu, tetapi kebanyakannya memfokuskan pada arah ramalan trajektori kenderaan Hari ini, Jantung Pemanduan Autonomi akan berkongsi dengan anda algoritma untuk ramalan trajektori pejalan kaki pada NeurIPS - SHENet Dalam senario terhad, manusia corak pergerakan biasanya Pada tahap tertentu, ia mematuhi peraturan yang terhad. Berdasarkan andaian ini, SHENet meramalkan trajektori masa depan seseorang dengan mempelajari peraturan adegan tersirat. Artikel itu telah dibenarkan untuk menjadi asli oleh Autonomous Driving Heart! Pemahaman peribadi penulis, pada masa ini meramalkan trajektori masa depan seseorang masih menjadi masalah yang mencabar kerana rawak dan subjektiviti pergerakan manusia. Walau bagaimanapun, corak pergerakan manusia dalam adegan terhalang selalunya berbeza-beza disebabkan oleh kekangan pemandangan (cth., pelan lantai, jalan raya dan halangan) dan interaktiviti manusia dengan manusia atau manusia dengan objek.
