

Untuk seni bina elektronik dan elektrik berpusat generasi seterusnya, penggunaan unit pengkomputeran pusat zon + pusat dan susun atur pengawal serantau telah menjadi pilihan yang mesti ada untuk pelbagai pemain OEM atau tier1 Terdapat tiga kaedah seni bina untuk pengkomputeran pusat unit Kaedah: Pemisahan SOC, pengasingan perkakasan, virtualisasi perisian. Unit pengkomputeran pusat berpusat akan menyepadukan fungsi perniagaan teras tiga domain utama pemanduan autonomi, kokpit pintar dan kawalan kenderaan Pengawal serantau yang diseragamkan mempunyai tiga tanggungjawab utama: pengagihan kuasa, perkhidmatan data dan pintu masuk wilayah. Oleh itu, unit pengkomputeran pusat akan menyepadukan suis Ethernet throughput tinggi.
Apabila tahap integrasi keseluruhan kenderaan semakin tinggi, semakin banyak fungsi ECU akan diserap secara perlahan ke dalam pengawal serantau. Pengawal wilayah berasaskan platform menggunakan reka bentuk perkakasan yang sama dan antara muka IO yang sama, yang boleh memenuhi keperluan kebolehskalaan model yang berbeza dengan lebih baik. Oleh itu, kawalan serantau juga menganggap fungsi penting abstraksi perkakasan kenderaan. Kedua-duanya akan menggunakan Ethernet berkelajuan tinggi dan bukannya komunikasi Can asal untuk menyambung antara satu sama lain. Ringkasnya, seni bina elektronik boleh skala adalah untuk melindungi perbezaan perkakasan antara model. Tidak kira berapa banyak pengawal serantau yang digunakan dalam rangkaian komunikasi, mod komunikasi bersama mereka mengikut peraturan yang sama. Pada masa yang sama, pengawal serantau juga memikul tanggungjawab mengabstraksi fungsi ECU dalam rangkaian kawasan setempatnya.
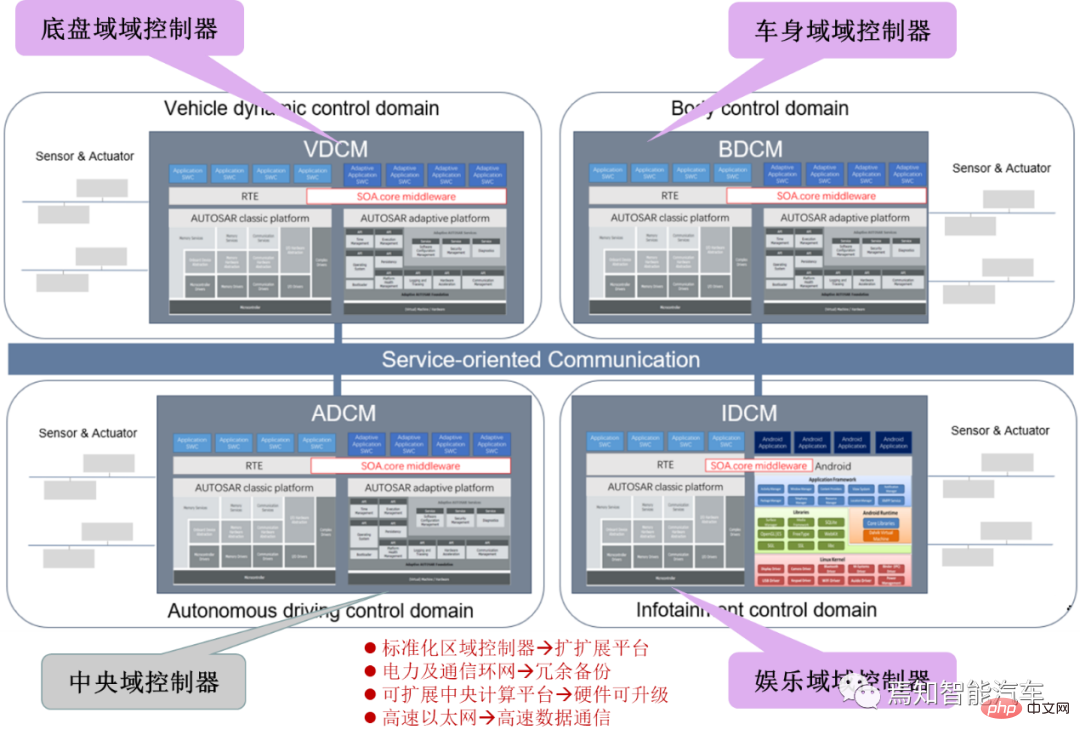
Seni bina berpusat di atas dengan platform pengkomputeran pusat sebagai teras telah menyediakan penderia bersatu dan antara muka persisian, yang boleh menyokong peningkatan cip Matlamat utamanya adalah untuk mencapainya -Perkakasan kereta semasa kitaran hayat boleh dinaik taraf, dengan itu memanjangkan kitaran hayat pintar kereta. Setiap pengawal serantau mempunyai sistem pengendalian middleware SOA Core Middleware sendiri, yang boleh menyediakan rangka kerja pengkomputeran dan komunikasi teragih, melindungi perbezaan dalam inti pelbagai sistem pengendalian, dan menyediakan rangka kerja pembangunan perkhidmatan bersatu untuk bahagian atas. Fungsi yang terlibat termasuk pengurusan perkhidmatan, pengurusan rangkaian, pengurusan komunikasi, peningkatan, diagnosis, log, status, dll.
Artikel ini akan menumpukan pada arah penyahgandingan perisian dan perkakasan untuk menerangkan cara menggunakan perisian dan perkakasan untuk SOA.
Rajah berikut menunjukkan prinsip reka bentuk seni bina perisian SOA yang tipikal. Seni bina pembangunan berorientasikan perkhidmatan ini sebenarnya merupakan penyelesaian model seni bina SOA untuk pembangunan berorientasikan perkhidmatan, membolehkan pengurus produk menumpukan pada reka bentuk perkhidmatan, manakala perisian sistem pergi jauh ke dalam proses pembangunan produk Ini juga merupakan penyelesaian kepada krisis perisian automotif. Satu kejayaan besar. Keseluruhan seni bina SOA boleh diringkaskan sebagai sistem decoupled perisian-perkakasan yang dibina oleh seni bina logik dan abstraksi perkhidmatan dan penyesuaian yang dilengkapkan oleh seni bina perkhidmatan, akhirnya mewujudkan sistem perkhidmatan yang standard.
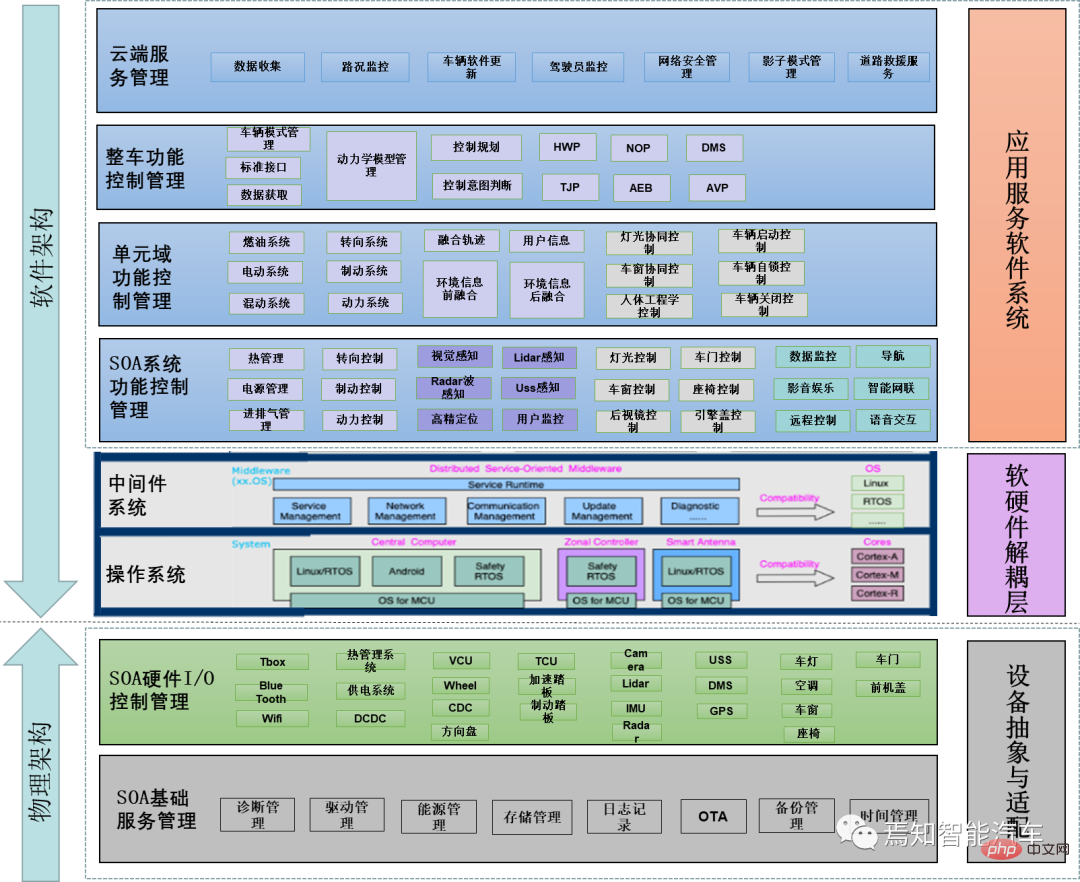
Proses reka bentuk seni bina logik keseluruhan boleh diringkaskan sebagai:
Seni bina elektronik dan elektrik: Reka bentuk seni bina berskala (juga dipanggil pengkomputeran dan seni bina komunikasi) perlu memenuhi keperluan reka bentuk berlapis, ujian berlapis, dan pengesahan berlapis untuk mengelakkan tindak balas rantaian perubahan perisian semasa fasa pembangunan dan wabak masalah tertumpu semasa ujian integrasi, supaya masalah dapat ditemui dengan lebih cepat dan versi perisian boleh diubah dengan lebih cepat.
Platform pengkomputeran perkakasan: Platform perkakasan boleh skala termasuk pengurusan perkhidmatan asas SOA dan pengurusan kawalan I/O perkakasan SOA Ia serasi dengan berbilang penderia dan peranti luaran sistem pemanduan autonomi dan sokongan pelbagai cip Heterogen dan peningkatan perkakasan.
Perisian kernel/perkhidmatan sistem pengendalian: Sebagai teras penjadualan dan pemanduan fail, sistem pengendalian boleh mencapai kawalan terbaik dalam menyokong penyahgandingan perisian dan perkakasan serta penggunaan perisian pada keupayaan perkakasan.
Seni bina komunikasi: Skala seni bina komunikasi dapat memastikan penyesuaian pantas dalam pembangunan model berasaskan platform Perbezaan antara model boleh dikurangkan kepada minimum, dan susunan peringkat seterusnya pembangunan model boleh dipastikan Dengan menggunakan generasi semasa produk untuk pengembangan komunikasi, tidak ada keperluan untuk menjalankan banyak kerja pembangunan tambahan, yang boleh mengurangkan tekanan penyelenggaraan barisan produk kemudian.
Untuk memenuhi keperluan masa nyata kawalan kenderaan, rangkaian teras akan mengguna pakai teknologi komunikasi yang boleh dipercayai seperti TSN. Dalam LAN di bawah pengawal serantau, kaedah komunikasi tradisional seperti CAN dan Lin akan terus wujud. Komunikasi dalam rangkaian kawasan tempatan boleh dijalankan dalam bentuk isyarat tradisional Dalam rangkaian tulang belakang Ethernet teras, data akan berinteraksi dalam bentuk perkhidmatan, yang memerlukan perisian tengah komunikasi seperti DDS.
Lapisan perkhidmatan/lapisan aplikasi: Lapisan perkhidmatan piawai dan lapisan aplikasi boleh orkestra termasuk pengurusan fungsi sistem SOA, pengurusan fungsi domain unit, pengurusan kawalan fungsi kenderaan dan pengurusan perkhidmatan awan.
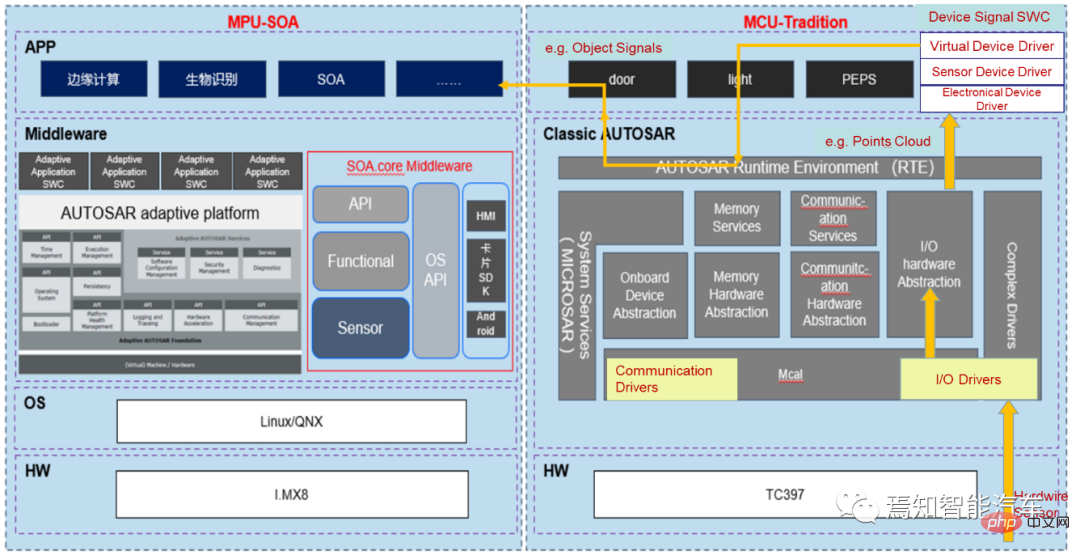
Sebelum analisis terperinci penggunaan teknologi teras seni bina perisian dengan kawalan domain pusat sebagai teras , analisis terperinci diperlukan Terangkan beberapa konsep penting yang berkaitan. Corak reka bentuk penderia/penggerak dalam Autosar menerangkan cara ECU mengendalikan penderia/penggerak dalam gelung dalam konteks seni bina keseluruhan.
Pengabstrakan peranti BEG terletak pada RTE (yang berada di atas persekitaran larian percubaan Ia adalah satu set komponen perisian yang diabstrakkan daripada penderia dan penggerak yang disambungkan ke ECU tertentu Ia menggunakan komponen perisian sensor atau penggerak). RTE Satu-satunya komponen di atas yang membenarkan akses kepada antara muka abstrak ECU. Abstraksi peranti mengekstrak isyarat mentah penderia dan penggerak, seperti piksel, awan titik, voltan, isyarat PWM, isyarat/mesej digital, frekuensi dan menyediakan antara muka fizikal (seperti piksel, awan titik, tekanan, jisim, Suhu, dsb. ). Sebenarnya, abstraksi peranti melengkapkan penukaran nilai fizikal seperti nilai voltan, isyarat digital, awan titik, dll.
Abstraksi peranti mencerminkan kebolehtukaran perisian lapisan aplikasi antara varian perkakasan yang berbeza melalui perisian platform dan perisian pemacu asas.
Jadual 1 Hubungan abstrak antara perisian platform dan peranti (sensor)
| Pelapis abstrak |
Fungsi |
Prinsip kerja |
Butiran kerja |
||||||||||||||||||||
Perisian platform |
Masukkan nilai perolehan asal, nilai voltan keluaran Menyahganding perisian dan sambungan perkakasan |
Sediakan sifat fizikal antara muka primitif |
sifat mekanikal, sifat elektrik, sifat berfungsi dan sifat prosedur. |
||||||||||||||||||||
Pemandu peralatan elektrik |
Nilai voltan input, nilai voltan ditapis output Pastikan Pengukuran sensor ketersediaan nilai |
Jalankan perisian pemacu peranti elektrik diagnostik elektrik (seperti mengesan tanah, litar pintas bateri, litar terbuka, dll.) |
Penuras denosing Pampasan voltan apabila penderia dikuasakan secara luaran |
||||||||||||||||||||
Pemandu peranti sensor |
Nilai voltan input, nilai sensor output seperti piksel, awan titik, nilai suhu Nyahgandingkan perbezaan penderia yang berbeza |
Laksanakan pemacu peranti penderia; Kawal kelakuan fizikal penderia; Penukaran daripada isyarat mentah (isyarat elektrik) kepada nilai fizikal; | · Titik sifar dan penyesuaian mengimbangi
· Pengesanan hanyut bagi nilai yang diukur · Pemeriksaan diagnostik ·Pemeriksaan nilai fizikal ·Fungsi penapisan (termasuk pensampelan rendah) | Pemandu peranti maya||||||||||||||||||||
| Masukkan nilai makna penderia dan keluarkan nilai lengkap selepas suplemen, seperti nilai kecerahan | terminal pampasan isyarat sensor yang dipisahkan
|
·Penilaian kualiti isyarat | ·Penggantian nilai asal bagi isyarat (seperti apabila kualiti isyarat sensor tidak mencukupi)
·Pampasan nilai asal isyarat ·Pengesahan nilai asal isyarat ·Antara muka diagnostik ujian berfungsi Jadual 2 Hubungan abstrak antara perisian platform dan peranti (pelaksana)
Ringkasnya, konsep dan reka bentuk abstrak peranti BEG boleh diringkaskan seperti berikut: Perisian aplikasi adalah bebas daripada penderia dan penggerak tertentu yang disambungkan kepada ECU tertentu Antara berbeza penderia dan kod penggerak boleh digunakan semula; Model kerjasama perkongsian kod yang berbeza (perkongsian perisian) untuk menyokong model perniagaan yang berbeza Mengedarkan atau mengagihkan semula fungsi ke ECU yang berbeza ini Juga dikenali sebagai peranti; abstraksi; Abstraksi peranti menyelesaikan masalah Modul lapisan S&A yang mendedahkan fungsi dan antara muka perkhidmatan ke atas, dan menyambungkan perisian platform ke bawah Matlamatnya adalah untuk mendedahkan antara muka sebanyak mungkin, mencapai penyahgandingan perisian dan perkakasan, dan mengelakkan S&A Perubahan mengakibatkan perubahan perisian. 03 Contoh abstraksi peranti dalam SOADi sini kami memberikan contoh untuk menggambarkan cara melaksanakan abstraksi peranti dalam seni bina SOA. Kaedah ini hanya perlu mengetahui kategori penderia (seperti radar, kamera, dll.) untuk menentukan data mentah input Rawdata Tidak perlu mengetahui kaedah sambungan khusus bagi penderia ini, hanya yang terakhir data penderiaan perlu digunakan. Mengambil abstraksi peranti penderia sebagai contoh, ia boleh dinyatakan seperti berikut:
Pertama, MCAL dalam lapisan fizikal asas mengumpul data dengan mengakses port uC dan Menyediakan data mentah dan mengesannya setiap tempoh tertentu (seperti 10ms Tidak perlu memahami mod sambungan peralatan elektrik dan makna data yang sepadan). Sebagai contoh, data piksel imej asal dikumpul daripada sensor lidar asas dan input kepada mikropengawal MCU/SOC. Kedua, MCU/SOC mengeluarkan nilai awan titik yang sepadan daripada alamat fizikal yang sepadan mengikut tempoh tertentu, memberikannya kepada modul abstraksi perkakasan I/O melalui peranti I/O dan mengukurnya melalui pengesanan titik abstraksi perkakasan I/O Perkakas elektrik peringkat pertama pada titik pengukuran data disambungkan kepada penghalaan Penderia mengira nilai voltan berdasarkan maklumat penghalaan dan data mentah yang ditafsirkan dan melakukan pemprosesan penapisan tidak memerlukan pemahaman makna data yang diukur. Seterusnya, nilai voltan dalam modul abstraksi perkakasan diproses langkah demi langkah mengikut pemacu 8bit, dan dipanggil oleh pemacu peranti elektronik penderia untuk menjana nilai asal asas. Nilai ini memacu Peranti Maya Dri melalui pejalan kaki peranti maya sensor, papan tanda jalan, dsb. Akhir sekali, perisian aplikasi dalam AP Autosar membaca data peringkat sasaran pengesan sensor dalam masa nyata melalui persekitaran larian masa nyata RTE, yang digunakan untuk kawalan perancangan seterusnya dan kawalan membuat keputusan perisian aplikasi . Seperti yang dapat dilihat daripada contoh di atas, pengabstrakan peranti mempunyai kelebihan berikut. Perubahan dalam Sensor & Actuator tidak akan menyebabkan perubahan yang berkaitan dalam perisian platform dan perisian aplikasi Secara ringkasnya, terdapat kira-kira jenis perisian berikut dan penyahgandingan perkakasan yang disebabkan oleh transformasi. Untuk menggantikan pelbagai jenis sensor penderiaan, pemilihan ECU tidak lagi terhad kepada model mod analisis isyarat yang disokong oleh ECU. Sebagai contoh, untuk menggantikan model NTC dan PTC, anda hanya perlu mengubah suai modul perisian yang terdapat dalam Pemacu Peranti. Modul sensor dan penggerak daripada jenis yang sama boleh berkongsi beberapa modul pemprosesan yang sama Contohnya, untuk mod pemprosesan kamera pandangan sisi, algoritma pemprosesan salah satu kamera pandangan sisi boleh digunakan secara langsung kepada tiga yang lain, dan hanya perlu menentukur semula parameter kamera bagi tiga kamera. Jika sesetengah kamera perlu dikemas kini kepada kamera beresolusi tinggi, tidak perlu membuat perubahan besar pada perisian pemacu dan perisian platform. sekurang-kurangnya Tidak perlu menukar bentuk antara muka I/O dan mod input data, tetapi modul algoritma untuk memproses imej perlu ditala semula Sebagai contoh, algoritma pemprosesan resolusi rendah asal mungkin tidak memenuhi masa nyata keperluan modul pemprosesan resolusi tinggi , pada masa ini, adalah perlu untuk mengkaji kaedah pengoptimuman model pecutan rangkaian saraf, tetapi model seni bina algoritma keseluruhan kekal tidak berubah. 04 RingkasanPada masa ini, kaedah pembangunan yang dianjurkan oleh kebanyakan OEM ialah pembangunan produk berasaskan platform, dan platformisasi menekankan idea teras perisian dan perkakasan penyahgandingan Penerimaan model seni bina SOA Adalah mudah untuk membentuk pembahagian kerja antara barisan produk dan barisan platform Barisan produk bertanggungjawab untuk projek model kenderaan tertentu, dan barisan platform bertanggungjawab untuk membina pusat teknikal. Dalam pembangunan platform baharu, pautan teknikal selalunya sangat panjang dan kompleks Reka bentuk seni bina berlapis dan kaedah penyahgandingan perisian dan perkakasan boleh memudahkan ujian dan pengesahan berlapis, mengurangkan tekanan ujian integrasi, dan menemui masalah dengan lebih lengkap meningkatkan kelajuan keluaran versi. |
Atas ialah kandungan terperinci Reka bentuk seni bina perisian dan metodologi penyahgandingan perisian dan perkakasan dalam SOA. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

















![[Web front-end] Permulaan pantas Node.js](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



