
 Peranti teknologi
AI
Berbilang dron bekerjasama untuk mencetak rumah 3D, dan penyelidikan muncul pada kulit Alam Semula Jadi
Peranti teknologi
AI
Berbilang dron bekerjasama untuk mencetak rumah 3D, dan penyelidikan muncul pada kulit Alam Semula Jadi
Berbilang dron bekerjasama untuk mencetak rumah 3D, dan penyelidikan muncul pada kulit Alam Semula Jadi

Kita sering dapat melihat lebah, semut dan haiwan lain sibuk membina sarang. Selepas pemilihan semula jadi, kecekapan kerja mereka sangat tinggi
Keupayaan haiwan ini untuk bekerja bersama telah "diserahkan" kepada dron Satu kajian dari Imperial College London memberitahu kami Shows the future arah, seperti ini:

Dron 3D habuk:

Hasil penyelidikan ini muncul di muka depan Nature pada hari Rabu.

Alamat kertas: https://www.nature.com/articles/s41586-022-04988-4
Untuk menunjukkan keupayaan dron, penyelidik menggunakan buih dan bahan simen ringan khas untuk membina struktur dengan ketinggian antara 0.18 meter hingga 2.05 meter. Ralat berbanding dengan pelan tindakan asal adalah kurang daripada 5mm.

Untuk membuktikan bahawa sistem boleh mengendalikan pembentukan dron yang lebih kompleks, pasukan mencipta selang masa jejak cahaya menggunakan lampu pada jujukan dron, mensimulasikan penciptaan struktur seperti kubah yang tinggi.
 .
.
Mirko Kovac, ketua penyelidikan dan pengarah Makmal Robotik Udara di Imperial College London, berkata: Kaedah ini boleh digunakan untuk membina bangunan di Artik atau Marikh, atau untuk membantu membaiki selalunya mahal Perancah untuk bangunan tinggi.
Walau bagaimanapun, teknologi pada masa ini tertakluk kepada beberapa had, kerana dron sukar untuk membawa objek berat, memerlukan pengecasan biasa dan masih memerlukan pengawasan manusia. Walau bagaimanapun, para penyelidik mengatakan mereka berharap dapat mengurangkan beberapa isu ini dengan mengecas drone secara automatik semasa projek penyelidikan.
Bagaimanakah pencetakan 3D dron dicapai? Dalam hal ini, penyelidik telah membina sistem yang canggih.
Pengenalan Penyelidikan
Untuk meningkatkan produktiviti dan keselamatan, teknologi pembinaan berasaskan robot telah dicadangkan untuk pemasangan komponen bangunan dan bahan tambahan berterusan bentuk bebas Pembuatan (AM, pembuatan bahan tambahan). Berbanding dengan kaedah berasaskan pemasangan, AM berterusan bentuk bebas membolehkan pengeluaran fleksibel reka bentuk pembolehubah geometri dengan kecekapan tinggi dan kos rendah. Walau bagaimanapun, sistem besar ini perlu disambungkan kepada sumber kuasa, menyusahkan untuk pemeriksaan, penyelenggaraan dan pembaikan, dan sukar untuk dihasilkan dalam persekitaran yang keras.
Sebagai alternatif kepada sistem robot individu yang besar, robot mudah alih kecil boleh menawarkan fleksibiliti dan skalabiliti yang lebih besar. Walau bagaimanapun, penyelidikan menggunakan formasi robot untuk pembinaan masih dalam peringkat penerokaan awal pembangunan. Selain itu, ketinggian operasi semasa berbilang robot adalah terhad dan tidak boleh beroperasi melebihi julat tertentu. Rajah di bawah menunjukkan perbandingan antara platform robotik SOTA yang dibangunkan untuk AM dalam industri pembinaan.

Pembina semula jadi telah menunjukkan kebolehsuaian yang lebih besar apabila membina daripada sistem robotik semasa dan batasan yang wujud, dengan ramai yang Lakukan ini dengan bantuan fly-in dan kaedah pembinaan aditif. Sebagai contoh, burung walet boleh membuat 1200 penerbangan antara sumber bahan dan tapak pembinaan untuk melengkapkan sarang secara beransur-ansur. Serangga sosial seperti anai-anai dan tebuan menunjukkan tahap kebolehsuaian dan skalabiliti yang lebih tinggi: pembinaan udara oleh tebuan sosial menunjukkan pengoptimuman laluan yang cekap dan terus, mengurangkan keperluan untuk menavigasi sepanjang proses pembinaan.
Sistem semula jadi ini memberi inspirasi kepada pendekatan untuk membina kolektif menggunakan pelbagai ejen, yang memerlukan penyelesaian masalah penyelarasan berbilang ejen melangkaui teknologi yang tersedia pada masa ini. Sebagai tambahan kepada kaedah interaksi kolektif untuk sistem berbilang robot, reka bentuk dan penggunaan bahan serta mekanisme manipulasi alam sekitar mesti disepadukan dan dibangunkan bersama untuk membolehkan pembinaan koperasi.
Sistem yang dicadangkan oleh Imperial College dipanggil Aerial-AM, yang menggabungkan mekanisme kerjasama biologi dengan prinsip kejuruteraan dan menggunakan berbilang dron untuk mencapainya.
Realisasi pembuatan bahan tambahan autonomi pasukan dron memerlukan pembangunan selari beberapa teknologi utama, termasuk: 1) Robot udara yang mampu mendapan bahan berketepatan tinggi dan kualiti cetakan, dan sebenar -penilaian kualitatif masa ; 2) Pasukan robot udara boleh menyiarkan aktiviti mereka antara satu sama lain dan berkongsi data secara wayarles tanpa mengganggu satu sama lain 3) Navigasi autonomi dan sistem perancangan tugas, digabungkan dengan strategi laluan percetakan untuk menyesuaikan tugas pembuatan; ) Reka bentuk atau pemilihan perancangan bahan , khususnya campuran simen yang ringan dan boleh dicetak sesuai untuk kaedah pembuatan bahan tambahan udara tanpa memerlukan acuan atau perancah sementara.
Aerial-AM menggunakan dua jenis platform robot udara, dipanggil BuildDrone dan ScanDrone digunakan untuk menyusun bahan fizikal, dan ScanDrone digunakan untuk melakukan pembesaran selepas setiap lapisan bahan. didepositkan. Kedua-dua platform robotik diselaraskan pada aliran kerja masing-masing melalui pendekatan berbilang ejen yang diedarkan. Kitaran binaan termasuk pencirian prestasi cetakan dalam penerbangan bagi BuilDrones dan ScanDrone, penyesuaian trajektori masa nyata dan pencetakan bahan BuildDrones, dan pengesahan hasil cetakan dengan ScanDrone dan penyelia manusia.

Rajah 2. Rangka kerja Aerial-AM untuk AM tidak terhad dan tidak terhad.
Rangka kerja Aerial-AM berbilang ejen yang dicadangkan oleh penyelidikan baharu ini terdiri daripada dua gelung, berjalan pada skala perancangan masa perlahan dan skala masa pantas masa nyata operasi, digunakan untuk pembuatan dan pemerhatian kemajuan. Dalam bukti konsep, penyelidik menggunakan sistem penglihatan bawaan udara ScanDrone untuk melakukan imbasan 3D untuk memetakan kemajuan, membina silinder besar daripada bahan buih yang diperluas.

Rajah 3. Aerial-AM BuildDrone mencetak geometri silinder tinggi 2.05 m dengan 72 pas pemendapan bahan, dan penilaian cetakan masa nyata oleh ScanDrone.

Rajah 4. Dua BuildDrones 3D mencetak silinder berdinding nipis menggunakan robot delta terkompensasi ralat untuk mendepositkan Bahan simen.

Rajah 5. Permukaan berputar berbentuk kubah cetakan maya landasan optik berbilang robot Aerial-AM. a, c ialah trajektori penerbangan, b, d ialah pandangan atas dan perspektif. f menunjukkan hasil simulasi menggunakan 15 robot untuk mencetak versi geometri yang diperbesarkan dengan diameter tapak 15 m.
Menggunakan pemendapan bahan BuildDrone dan penilaian kualitatif masa nyata ScanDrone terhadap struktur bercetak, penyelidik berjaya mencetak silinder sehingga 2.05 meter tinggi, menunjukkan kaedah pembuatan Aerial-AM Keupayaan untuk mengendalikan objek geometri yang besar. Eksperimen ke atas fabrikasi silinder berdinding nipis bersimen menunjukkan bahawa gandingan robot delta selari jajaran sendiri dengan BuildDrone membolehkan pemendapan bahan dalam arah sisi dan menegak dengan ketepatan tinggi (ralat kedudukan maksimum 5 mm), tahap telaga dalam had yang dibenarkan oleh keperluan pembinaan UK.
Hasil simulasi AM trek cahaya maya menunjukkan bahawa rangka kerja Aerial-AM boleh mencetak pelbagai geometri secara berkesan melalui pembuatan berbilang robot selari sambil menyelesaikan kesesakan dan menyelesaikan tugasan autonomi dalam keadaan tidak normal.
Walaupun eksperimen ini berjaya menunjukkan kebolehlaksanaan Aerial-AM, ia hanyalah langkah pertama dalam meneroka potensi menggunakan robot udara untuk pembinaan. Penyelidik berkata bahawa untuk merealisasikan pencetakan 3D rumah dengan dron, kemajuan yang ketara diperlukan dalam robotik dan sains bahan, terutamanya dalam bidang termaju seperti pemendapan bahan sokongan, pemejalan bahan aktif, dan perkongsian tugas antara berbilang robot. .
Bagi dron itu sendiri, untuk membawa hasil penyelidikan keluar dari makmal, penyelidik merancang untuk melaksanakan multi-sensor serentak kedudukan dan pemetaan (SLAM) dengan sistem penentududukan global yang berbeza (GPS) ) untuk menyediakan kedudukan luar yang mencukupi.
Setelah praktikal, Aerial-AM mungkin menyediakan cara alternatif untuk menyokong perumahan dan infrastruktur kritikal di kawasan terpencil.
Atas ialah kandungan terperinci Berbilang dron bekerjasama untuk mencetak rumah 3D, dan penyelidikan muncul pada kulit Alam Semula Jadi. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

Video Face Swap
Tukar muka dalam mana-mana video dengan mudah menggunakan alat tukar muka AI percuma kami!

Artikel Panas
Alat panas

Notepad++7.3.1
Editor kod yang mudah digunakan dan percuma

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

Hantar Studio 13.0.1
Persekitaran pembangunan bersepadu PHP yang berkuasa

Dreamweaver CS6
Alat pembangunan web visual

SublimeText3 versi Mac
Perisian penyuntingan kod peringkat Tuhan (SublimeText3)
Topik panas
 1666
1666
 14
1425
52
1328
25
1273
29
1253
24
14
1425
52
1328
25
1273
29
1253
24

 Kertas Stable Diffusion 3 akhirnya telah dikeluarkan, dan butiran seni bina didedahkan Adakah ia akan membantu untuk menghasilkan semula Sora?
Mar 06, 2024 pm 05:34 PM
Kertas Stable Diffusion 3 akhirnya telah dikeluarkan, dan butiran seni bina didedahkan Adakah ia akan membantu untuk menghasilkan semula Sora?
Mar 06, 2024 pm 05:34 PM
Kertas StableDiffusion3 akhirnya di sini! Model ini dikeluarkan dua minggu lalu dan menggunakan seni bina DiT (DiffusionTransformer) yang sama seperti Sora. Ia menimbulkan kekecohan apabila ia dikeluarkan. Berbanding dengan versi sebelumnya, kualiti imej yang dijana oleh StableDiffusion3 telah dipertingkatkan dengan ketara Ia kini menyokong gesaan berbilang tema, dan kesan penulisan teks juga telah dipertingkatkan, dan aksara bercelaru tidak lagi muncul. StabilityAI menegaskan bahawa StableDiffusion3 ialah satu siri model dengan saiz parameter antara 800M hingga 8B. Julat parameter ini bermakna model boleh dijalankan terus pada banyak peranti mudah alih, dengan ketara mengurangkan penggunaan AI
 Adakah anda benar-benar menguasai penukaran sistem koordinat? Isu berbilang sensor yang tidak dapat dipisahkan daripada pemanduan autonomi
Oct 12, 2023 am 11:21 AM
Adakah anda benar-benar menguasai penukaran sistem koordinat? Isu berbilang sensor yang tidak dapat dipisahkan daripada pemanduan autonomi
Oct 12, 2023 am 11:21 AM
Artikel perintis dan utama pertama terutamanya memperkenalkan beberapa sistem koordinat yang biasa digunakan dalam teknologi pemanduan autonomi, dan cara melengkapkan korelasi dan penukaran antara mereka, dan akhirnya membina model persekitaran bersatu. Fokus di sini adalah untuk memahami penukaran daripada kenderaan kepada badan tegar kamera (parameter luaran), penukaran kamera kepada imej (parameter dalaman) dan penukaran unit imej kepada piksel. Penukaran daripada 3D kepada 2D akan mempunyai herotan, terjemahan, dsb. Perkara utama: Sistem koordinat kenderaan dan sistem koordinat badan kamera perlu ditulis semula: sistem koordinat satah dan sistem koordinat piksel Kesukaran: herotan imej mesti dipertimbangkan Kedua-dua penyahherotan dan penambahan herotan diberi pampasan pada satah imej. 2. Pengenalan Terdapat empat sistem penglihatan secara keseluruhannya: sistem koordinat satah piksel (u, v), sistem koordinat imej (x, y), sistem koordinat kamera () dan sistem koordinat dunia (). Terdapat hubungan antara setiap sistem koordinat,
 DualBEV: mengatasi BEVFormer dan BEVDet4D dengan ketara, buka buku!
Mar 21, 2024 pm 05:21 PM
DualBEV: mengatasi BEVFormer dan BEVDet4D dengan ketara, buka buku!
Mar 21, 2024 pm 05:21 PM
Kertas kerja ini meneroka masalah mengesan objek dengan tepat dari sudut pandangan yang berbeza (seperti perspektif dan pandangan mata burung) dalam pemanduan autonomi, terutamanya cara mengubah ciri dari perspektif (PV) kepada ruang pandangan mata burung (BEV) dengan berkesan dilaksanakan melalui modul Transformasi Visual (VT). Kaedah sedia ada secara amnya dibahagikan kepada dua strategi: penukaran 2D kepada 3D dan 3D kepada 2D. Kaedah 2D-ke-3D meningkatkan ciri 2D yang padat dengan meramalkan kebarangkalian kedalaman, tetapi ketidakpastian yang wujud dalam ramalan kedalaman, terutamanya di kawasan yang jauh, mungkin menimbulkan ketidaktepatan. Manakala kaedah 3D ke 2D biasanya menggunakan pertanyaan 3D untuk mencuba ciri 2D dan mempelajari berat perhatian bagi kesesuaian antara ciri 3D dan 2D melalui Transformer, yang meningkatkan masa pengiraan dan penggunaan.
 Artikel ini sudah cukup untuk anda membaca tentang pemanduan autonomi dan ramalan trajektori!
Feb 28, 2024 pm 07:20 PM
Artikel ini sudah cukup untuk anda membaca tentang pemanduan autonomi dan ramalan trajektori!
Feb 28, 2024 pm 07:20 PM
Ramalan trajektori memainkan peranan penting dalam pemanduan autonomi Ramalan trajektori pemanduan autonomi merujuk kepada meramalkan trajektori pemanduan masa hadapan kenderaan dengan menganalisis pelbagai data semasa proses pemanduan kenderaan. Sebagai modul teras pemanduan autonomi, kualiti ramalan trajektori adalah penting untuk kawalan perancangan hiliran. Tugas ramalan trajektori mempunyai timbunan teknologi yang kaya dan memerlukan kebiasaan dengan persepsi dinamik/statik pemanduan autonomi, peta ketepatan tinggi, garisan lorong, kemahiran seni bina rangkaian saraf (CNN&GNN&Transformer), dll. Sangat sukar untuk bermula! Ramai peminat berharap untuk memulakan ramalan trajektori secepat mungkin dan mengelakkan perangkap Hari ini saya akan mengambil kira beberapa masalah biasa dan kaedah pembelajaran pengenalan untuk ramalan trajektori! Pengetahuan berkaitan pengenalan 1. Adakah kertas pratonton teratur? A: Tengok survey dulu, hlm
 Reka bentuk yang dioptimumkan AI, rintangan haba dikurangkan sebanyak 2.3C / 100W, Asetek bekerjasama dengan Fabric8Labs untuk melancarkan kepala sejuk baharu
Jun 06, 2024 pm 12:59 PM
Reka bentuk yang dioptimumkan AI, rintangan haba dikurangkan sebanyak 2.3C / 100W, Asetek bekerjasama dengan Fabric8Labs untuk melancarkan kepala sejuk baharu
Jun 06, 2024 pm 12:59 PM
Menurut berita dari laman web ini pada 3 Jun, penyedia penyelesaian penyejukan air Asetek mengumumkan bahawa ia telah bekerjasama dengan syarikat percetakan 3D logam Fabric8Labs untuk melancarkan kepala sejuk yang dioptimumkan AI baharu, yang akan dipaparkan di gerai ASUS ROG di Computex 2024 Taipei International Pertunjukan Komputer. Berbanding dengan penyelesaian penyejukan air generasi sebelumnya, kepala sejuk yang dioptimumkan AI menggunakan kecerdasan buatan dan teknologi pembuatan aditif ECAM untuk meningkatkan prestasi pelesapan haba dengan cara yang "tidak pernah berlaku sebelum ini" dengan mengoptimumkan dinamik bendalir. Menurut laporan, pegawai itu menggunakan alat simulasi AI yang kompleks untuk membina keseluruhan struktur kepala sejuk Sirip berbeza dalam reka bentuk dan hanya boleh dihasilkan menggunakan proses pencetakan 3D. Laman web ini mendapati bahawa berbanding dengan penyelesaian generasi kelapan Asetek, reka bentuk kepala sejuk yang dioptimumkan AI asal boleh mengurangkan rintangan haba sebanyak 2.3C/1
 GSLAM |. Seni bina dan penanda aras umum SLAM
Oct 20, 2023 am 11:37 AM
GSLAM |. Seni bina dan penanda aras umum SLAM
Oct 20, 2023 am 11:37 AM
Tiba-tiba menemui kertas 19 tahun GSLAM: Rangka Kerja SLAM Umum dan kod sumber terbuka Penanda Aras: https://github.com/zdzhaoyong/GSLAM Pergi terus ke teks penuh dan rasai kualiti karya ini~1 Teknologi SLAM Abstrak telah mencapai banyak kejayaan baru-baru ini dan menarik ramai yang menarik perhatian syarikat berteknologi tinggi. Walau bagaimanapun, cara untuk antara muka dengan algoritma sedia ada atau yang baru muncul untuk melaksanakan penandaarasan dengan cekap pada kelajuan, kekukuhan dan mudah alih masih menjadi persoalan. Dalam kertas kerja ini, satu platform SLAM baharu yang dipanggil GSLAM dicadangkan, yang bukan sahaja menyediakan keupayaan penilaian tetapi juga menyediakan penyelidik dengan cara yang berguna untuk membangunkan sistem SLAM mereka sendiri dengan pantas.
 Model dunia penjanaan video adegan pemanduan berbilang paparan autonomi |
Oct 23, 2023 am 11:13 AM
Model dunia penjanaan video adegan pemanduan berbilang paparan autonomi |
Oct 23, 2023 am 11:13 AM
Beberapa pemikiran peribadi pengarang Dalam bidang pemanduan autonomi, dengan pembangunan sub-tugas/penyelesaian hujung-ke-hujung berasaskan BEV, data latihan berbilang paparan berkualiti tinggi dan pembinaan adegan simulasi yang sepadan telah menjadi semakin penting. Sebagai tindak balas kepada titik kesakitan tugas semasa, "kualiti tinggi" boleh dipecahkan kepada tiga aspek: senario ekor panjang dalam dimensi berbeza: seperti kenderaan jarak dekat dalam data halangan dan sudut arah tepat semasa pemotongan kereta, dan data garis lorong. . Ini selalunya bergantung pada sejumlah besar pengumpulan data dan strategi perlombongan data yang kompleks, yang memerlukan kos yang tinggi. Nilai sebenar 3D - imej sangat konsisten: Pemerolehan data BEV semasa sering dipengaruhi oleh ralat dalam pemasangan/penentukuran sensor, peta berketepatan tinggi dan algoritma pembinaan semula itu sendiri. ini membawa saya kepada
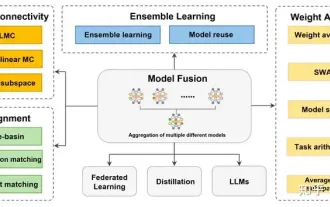 Semakan! Gabungan model mendalam (LLM/model asas/pembelajaran bersekutu/penalaan halus, dsb.)
Apr 18, 2024 pm 09:43 PM
Semakan! Gabungan model mendalam (LLM/model asas/pembelajaran bersekutu/penalaan halus, dsb.)
Apr 18, 2024 pm 09:43 PM
Pada 23 September, kertas kerja "DeepModelFusion:ASurvey" diterbitkan oleh Universiti Teknologi Pertahanan Nasional, JD.com dan Institut Teknologi Beijing. Gabungan/penggabungan model dalam ialah teknologi baru muncul yang menggabungkan parameter atau ramalan berbilang model pembelajaran mendalam ke dalam satu model. Ia menggabungkan keupayaan model yang berbeza untuk mengimbangi bias dan ralat model individu untuk prestasi yang lebih baik. Gabungan model mendalam pada model pembelajaran mendalam berskala besar (seperti LLM dan model asas) menghadapi beberapa cabaran, termasuk kos pengiraan yang tinggi, ruang parameter berdimensi tinggi, gangguan antara model heterogen yang berbeza, dsb. Artikel ini membahagikan kaedah gabungan model dalam sedia ada kepada empat kategori: (1) "Sambungan corak", yang menghubungkan penyelesaian dalam ruang berat melalui laluan pengurangan kerugian untuk mendapatkan gabungan model awal yang lebih baik.
