

kertas arXiv "Ramalan Kawalan berpandukan Trajektori untuk Pemanduan Autonomi Hujung-ke-hujung: Garis Dasar yang Mudah tetapi Kuat", Jun 2022, Makmal AI Shanghai dan Universiti Jiao Tong Shanghai.
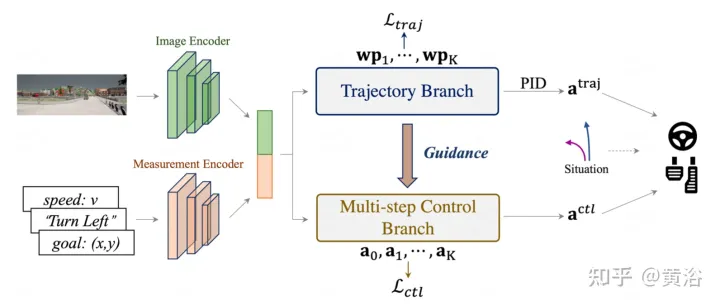
Kaedah pemanduan autonomi hujung ke hujung semasa sama ada menjalankan pengawal berdasarkan trajektori yang dirancang atau secara langsung melaksanakan ramalan kawalan, yang merangkumi dua bidang penyelidikan. Memandangkan potensi manfaat bersama antara kedua-duanya, artikel ini meneroka secara aktif gabungan kedua-duanya, yang dipanggil TCP (Ramalan Kawalan Berpandukan Trajektori). Secara khusus, kaedah ensemble mempunyai dua cabang, masing-masing untuk perancangan trajektori dan kawalan langsung. Cawangan trajektori meramalkan trajektori masa hadapan, manakala cawangan kawalan melibatkan skema ramalan pelbagai langkah baharu yang memberi alasan tentang hubungan antara tindakan semasa dan keadaan masa hadapan. Kedua-dua cawangan disambungkan supaya cawangan kawalan menerima bimbingan yang sepadan daripada cawangan trajektori pada setiap langkah masa. Keluaran kedua-dua cabang kemudiannya digabungkan untuk mencapai kelebihan yang saling melengkapi.
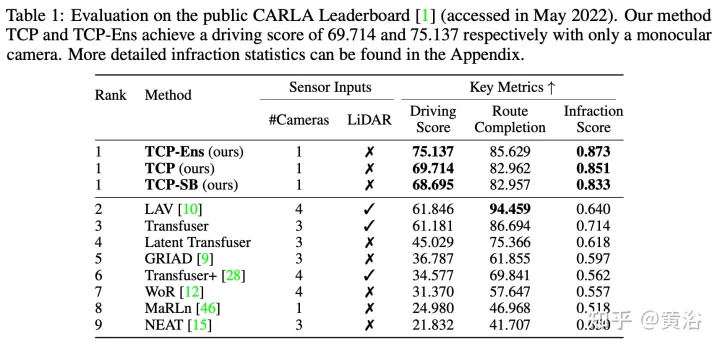
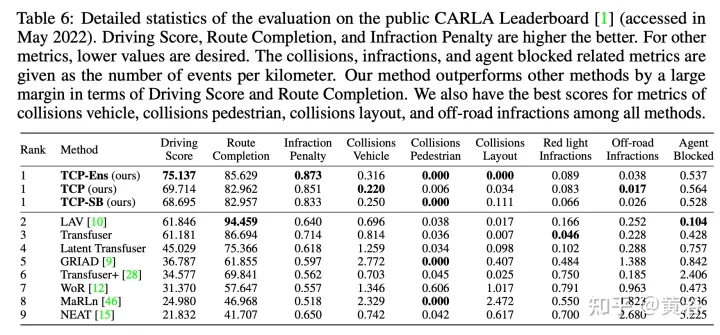
Penilaian menggunakan simulator Carla dalam persekitaran pemanduan bandar gelung tertutup dengan senario yang mencabar. Walaupun dengan input kamera monokular, kaedah ini menduduki tempat pertama dalam kedudukan rasmi CARLA. Kod sumber dan data akan menjadi sumber terbuka: https://github.com/OpenPerceptionX/TCP
Pilih Roach (“Pemanduan bandar hujung ke hujung dengan meniru jurulatih pembelajaran pengukuhan“. ICCV, 2021) sebagai pakar. Roach ialah model ringkas yang dilatih oleh RL dengan maklumat istimewa termasuk jalan raya, lorong, laluan, kenderaan, pejalan kaki, lampu isyarat dan stesen, semuanya dipaparkan sebagai imej BEV 2D. Berbanding dengan pakar buatan tangan, pakar berasaskan pembelajaran sedemikian boleh menyampaikan lebih banyak maklumat selain isyarat penyeliaan langsung. Khususnya, terdapat kehilangan ciri, yang memaksa ciri terpendam sebelum kepala keluaran akhir model pelajar menjadi serupa dengan ciri pakar. Kehilangan nilai juga ditambah sebagai tugas tambahan untuk model pelajar untuk meramalkan pulangan yang dijangkakan. Seperti yang ditunjukkan dalam rajah, keseluruhan seni bina terdiri daripada peringkat pengekodan input dan dua cawangan berikutnya: imej input i dihantar melalui pengekod imej berasaskan CNN, seperti ResNet, untuk menjana peta ciri F . Pada masa yang sama, maklumat navigasi g digabungkan dengan kelajuan semasa v untuk membentuk input pengukuran m, dan kemudian pengekod ukuran berasaskan MLP mengambil m sebagai inputnya dan mengeluarkan ciri ukuran jm. Ciri pengekodan kemudiannya dikongsi oleh kedua-dua cawangan untuk
trajektoridan kawalan berikutnya. Khususnya, Cawangan Kawalan ialah reka bentuk ramalan pelbagai langkah baharu dengan panduan daripada Cawangan Trajektori. Akhirnya, skim gabungan berasaskan senario diguna pakai untuk menggabungkan yang terbaik daripada kedua-dua paradigma keluaran.
 Seperti yang ditunjukkan dalam rajah, TCP mendapatkan bantuan cawangan perancangan trajektori dengan mempelajari peta perhatian untuk mengekstrak maklumat penting daripada peta ciri yang dikodkan. Interaksi antara kedua-dua cabang (trajektori dan kawalan) meningkatkan ketekalan kedua-dua paradigma keluaran yang berkait rapat ini dan menghuraikan lagi semangat pembelajaran pelbagai tugas (MTL). Khususnya, pengekod imej F digunakan untuk mengekstrak peta ciri 2D pada langkah masa t, dan keadaan tersembunyi yang sepadan daripada cawangan kawalan dan cawangan trajektori digunakan untuk mengira peta perhatian.
Seperti yang ditunjukkan dalam rajah, TCP mendapatkan bantuan cawangan perancangan trajektori dengan mempelajari peta perhatian untuk mengekstrak maklumat penting daripada peta ciri yang dikodkan. Interaksi antara kedua-dua cabang (trajektori dan kawalan) meningkatkan ketekalan kedua-dua paradigma keluaran yang berkait rapat ini dan menghuraikan lagi semangat pembelajaran pelbagai tugas (MTL). Khususnya, pengekod imej F digunakan untuk mengekstrak peta ciri 2D pada langkah masa t, dan keadaan tersembunyi yang sepadan daripada cawangan kawalan dan cawangan trajektori digunakan untuk mengira peta perhatian.
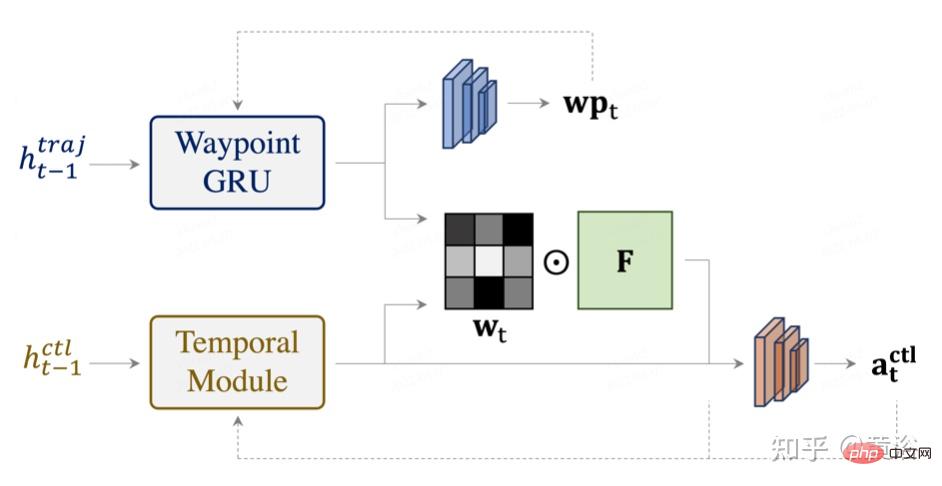 Ciri perwakilan maklumat dimasukkan ke dalam pengepala dasar, yang dikongsi antara semua langkah masa untuk meramalkan tindakan kawalan yang sepadan. Ambil perhatian bahawa untuk langkah awal, hanya ciri yang diukur digunakan untuk mengira peta perhatian awal, dan ciri imej perhatian digabungkan dengan ciri yang diukur untuk membentuk vektor ciri awal. Untuk memastikan ciri tersebut benar-benar menggambarkan keadaan langkah itu dan mengandungi maklumat penting untuk mengawal ramalan, kehilangan ciri ditambah pada setiap langkah supaya vektor ciri awal juga hampir dengan ciri pakar.
Ciri perwakilan maklumat dimasukkan ke dalam pengepala dasar, yang dikongsi antara semua langkah masa untuk meramalkan tindakan kawalan yang sepadan. Ambil perhatian bahawa untuk langkah awal, hanya ciri yang diukur digunakan untuk mengira peta perhatian awal, dan ciri imej perhatian digabungkan dengan ciri yang diukur untuk membentuk vektor ciri awal. Untuk memastikan ciri tersebut benar-benar menggambarkan keadaan langkah itu dan mengandungi maklumat penting untuk mengawal ramalan, kehilangan ciri ditambah pada setiap langkah supaya vektor ciri awal juga hampir dengan ciri pakar.
Rangka kerja TCP mempunyai dua bentuk perwakilan output: trajektori perancangan dan kawalan ramalan. Untuk gabungan selanjutnya, strategi gabungan berasaskan senario direka, seperti yang ditunjukkan dalam pseudokod Algoritma 1.
Secara khusus, α diwakili sebagai berat gabungan, dengan nilai antara 0 dan 0.5 Menurut kepercayaan terdahulu, dalam beberapa kes satu perwakilan lebih sesuai Dengan mengambil purata berat α, trajektori dan kawalan keputusan yang diramalkan digabungkan, dan yang lebih sesuai menduduki lebih berat (1 − α). Ambil perhatian bahawa berat gabungan α tidak perlu malar atau simetri, yang bermaksud bahawa ia boleh ditetapkan kepada nilai yang berbeza dalam situasi yang berbeza, atau untuk isyarat kawalan tertentu. Dalam eksperimen, adegan dipilih berdasarkan sama ada kenderaan sendiri berpusing, bermakna jika ia membelok, adegan itu adalah khusus kawalan, jika tidak, ia adalah khusus trajektori.
Keputusan percubaan adalah seperti berikut:
Atas ialah kandungan terperinci Kawalan ramalan untuk panduan trajektori dalam pemanduan autonomi hujung ke hujung: kaedah garis dasar yang mudah dan berkuasa TCP. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!
















![[Web front-end] Permulaan pantas Node.js](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



