

Latihan selari PyTorch Contoh kod lengkap DistributedDataParallel

Masalah melatih rangkaian neural dalam yang besar (DNN) menggunakan set data yang besar merupakan cabaran utama dalam bidang pembelajaran mendalam. Apabila saiz DNN dan set data meningkat, begitu juga keperluan pengiraan dan memori untuk melatih model ini. Ini menjadikannya sukar atau bahkan mustahil untuk melatih model ini pada satu mesin dengan sumber pengkomputeran yang terhad. Beberapa cabaran utama melatih DNN besar menggunakan set data yang besar termasuk:
- Masa latihan yang panjang: Proses latihan boleh mengambil masa berminggu-minggu atau bahkan berbulan-bulan untuk disiapkan, bergantung pada kerumitan model dan saiz set data tersebut.
- Had memori: DNN yang besar mungkin memerlukan sejumlah besar memori untuk menyimpan semua parameter model, kecerunan dan pengaktifan perantaraan semasa latihan. Ini boleh menyebabkan ralat kehabisan memori dan mengehadkan saiz model yang boleh dilatih pada satu mesin.
Untuk menangani cabaran ini, pelbagai teknik telah dibangunkan untuk meningkatkan latihan DNN besar dengan set data yang besar, termasuk keselarian model, keselarian data dan keselarian hibrid, serta perkakasan, perisian dan Pengoptimuman algoritma.
Dalam artikel ini kami akan menunjukkan keselarian data dan keselarian model menggunakan PyTorch.

Apa yang kami panggil selari secara amnya merujuk kepada melatih rangkaian saraf dalam (dnn) pada berbilang GPU atau berbilang mesin untuk mencapai Kurang masa latihan. Idea asas di sebalik keselarian data adalah untuk membahagikan data latihan kepada bahagian yang lebih kecil dan membiarkan setiap GPU atau mesin memproses sebahagian data yang berasingan. Keputusan untuk setiap nod kemudiannya digabungkan dan digunakan untuk mengemas kini parameter model. Dalam keselarian data, seni bina model adalah sama pada setiap nod, tetapi parameter model dipisahkan antara nod. Setiap nod melatih model setempatnya sendiri menggunakan ketulan data yang diperuntukkan, dan pada penghujung setiap lelaran latihan, parameter model disegerakkan merentas semua nod. Proses ini diulang sehingga model menumpu kepada hasil yang memuaskan.
Di bawah kami menggunakan set data ResNet50 dan CIFAR10 untuk contoh kod lengkap:
Dalam keselarian data, seni bina model kekal sama pada setiap nod, tetapi parameter model adalah berbeza antara nod. Pembahagian dilakukan, dan setiap nod melatih model setempatnya sendiri menggunakan ketulan data yang diperuntukkan.
Pustaka DistributedDataParallel PyTorch boleh berkomunikasi dan menyegerakkan kecerunan dan parameter model dengan cekap merentas nod untuk mencapai latihan teragih. Artikel ini memberikan contoh cara untuk melaksanakan keselarian data dengan PyTorch menggunakan set data ResNet50 dan CIFAR10, di mana kod dijalankan pada berbilang GPU atau mesin, dengan setiap mesin memproses subset data latihan. Proses latihan diselaraskan menggunakan perpustakaan DistributedDataParallel PyTorch.
Import perpustakaan yang diperlukan
import os from datetime import datetime from time import time import argparse import torchvision import torchvision.transforms as transforms import torch import torch.nn as nn import torch.distributed as dist from torch.nn.parallel import DistributedDataParallel
Seterusnya, kami akan menyemak GPU.
import subprocess result = subprocess.run(['nvidia-smi'], stdout=subprocess.PIPE) print(result.stdout.decode())
Oleh kerana kita perlu menjalankan berbilang pelayan, adalah tidak praktikal untuk melaksanakannya satu demi satu secara manual, jadi penjadual diperlukan. Di sini kami menggunakan fail SLURM untuk menjalankan kod (slurmpenjadual kerja sumber terbuka dan percuma untuk Linux dan kernel seperti Unix),
def main():
# get distributed configuration from Slurm environment
parser = argparse.ArgumentParser()
parser.add_argument('-b', '--batch-size', default=128, type =int,
help='batch size. it will be divided in mini-batch for each worker')
parser.add_argument('-e','--epochs', default=2, type=int, metavar='N',
help='number of total epochs to run')
parser.add_argument('-c','--checkpoint', default=None, type=str,
help='path to checkpoint to load')
args = parser.parse_args()
rank = int(os.environ['SLURM_PROCID'])
local_rank = int(os.environ['SLURM_LOCALID'])
size = int(os.environ['SLURM_NTASKS'])
master_addr = os.environ["SLURM_SRUN_COMM_HOST"]
port = "29500"
node_id = os.environ['SLURM_NODEID']
ddp_arg = [rank, local_rank, size, master_addr, port, node_id]
train(args, ddp_arg)Kemudian, kami menggunakan perpustakaan DistributedDataParallel untuk melaksanakan latihan yang diedarkan.
def train(args, ddp_arg):
rank, local_rank, size, MASTER_ADDR, port, NODE_ID = ddp_arg
# display info
if rank == 0:
#print(">>> Training on ", len(hostnames), " nodes and ", size, " processes, master node is ", MASTER_ADDR)
print(">>> Training on ", size, " GPUs, master node is ", MASTER_ADDR)
#print("- Process {} corresponds to GPU {} of node {}".format(rank, local_rank, NODE_ID))
print("- Process {} corresponds to GPU {} of node {}".format(rank, local_rank, NODE_ID))
# configure distribution method: define address and port of the master node and initialise communication backend (NCCL)
#dist.init_process_group(backend='nccl', init_method='env://', world_size=size, rank=rank)
dist.init_process_group(
backend='nccl',
init_method='tcp://{}:{}'.format(MASTER_ADDR, port),
world_size=size,
rank=rank
)
# distribute model
torch.cuda.set_device(local_rank)
gpu = torch.device("cuda")
#model = ResNet18(classes=10).to(gpu)
model = torchvision.models.resnet50(pretrained=False).to(gpu)
ddp_model = DistributedDataParallel(model, device_ids=[local_rank])
if args.checkpoint is not None:
map_location = {'cuda:%d' % 0: 'cuda:%d' % local_rank}
ddp_model.load_state_dict(torch.load(args.checkpoint, map_location=map_location))
# distribute batch size (mini-batch)
batch_size = args.batch_size
batch_size_per_gpu = batch_size // size
# define loss function (criterion) and optimizer
criterion = nn.CrossEntropyLoss()
optimizer = torch.optim.SGD(ddp_model.parameters(), 1e-4)
transform_train = transforms.Compose([
transforms.RandomCrop(32, padding=4),
transforms.RandomHorizontalFlip(),
transforms.ToTensor(),
transforms.Normalize((0.4914, 0.4822, 0.4465), (0.2023, 0.1994, 0.2010)),
])
# load data with distributed sampler
#train_dataset = torchvision.datasets.CIFAR10(root='./data',
# train=True,
# transform=transform_train,
# download=False)
# load data with distributed sampler
train_dataset = torchvision.datasets.CIFAR10(root='./data',
train=True,
transform=transform_train,
download=False)
train_sampler = torch.utils.data.distributed.DistributedSampler(train_dataset,
num_replicas=size,
rank=rank)
train_loader = torch.utils.data.DataLoader(dataset=train_dataset,
batch_size=batch_size_per_gpu,
shuffle=False,
num_workers=0,
pin_memory=True,
sampler=train_sampler)
# training (timers and display handled by process 0)
if rank == 0: start = datetime.now()
total_step = len(train_loader)
for epoch in range(args.epochs):
if rank == 0: start_dataload = time()
for i, (images, labels) in enumerate(train_loader):
# distribution of images and labels to all GPUs
images = images.to(gpu, non_blocking=True)
labels = labels.to(gpu, non_blocking=True)
if rank == 0: stop_dataload = time()
if rank == 0: start_training = time()
# forward pass
outputs = ddp_model(images)
loss = criterion(outputs, labels)
# backward and optimize
optimizer.zero_grad()
loss.backward()
optimizer.step()
if rank == 0: stop_training = time()
if (i + 1) % 10 == 0 and rank == 0:
print('Epoch [{}/{}], Step [{}/{}], Loss: {:.4f}, Time data load: {:.3f}ms, Time training: {:.3f}ms'.format(epoch + 1, args.epochs,
i + 1, total_step, loss.item(), (stop_dataload - start_dataload)*1000,
(stop_training - start_training)*1000))
if rank == 0: start_dataload = time()
#Save checkpoint at every end of epoch
if rank == 0:
torch.save(ddp_model.state_dict(), './checkpoint/{}GPU_{}epoch.checkpoint'.format(size, epoch+1))
if rank == 0:
print(">>> Training complete in: " + str(datetime.now() - start))
if __name__ == '__main__':
main()Kod membahagikan data dan model kepada berbilang GPU dan mengemas kini model dengan cara yang diedarkan. Berikut ialah beberapa penjelasan kod:
train(args, ddp_arg) mempunyai dua parameter, args dan ddp_arg, dengan args ialah parameter baris arahan yang dihantar kepada skrip dan ddp_arg mengandungi parameter berkaitan latihan teragih.
kedudukan, peringkat_tempatan, saiz, MASTER_ADDR, port, NODE_ID = ddp_arg: Buka pek parameter berkaitan latihan yang diedarkan dalam ddp_arg.
Jika kedudukan ialah 0, cetak bilangan GPU yang sedang digunakan dan maklumat alamat IP nod induk.
dist.init_process_group(backend='nccl', init_method='tcp://{}:{}'.format(MASTER_ADDR, port), world_size=size, rank=rank): Gunakan bahagian belakang NCCL Initialize kumpulan proses yang diedarkan.
torch.cuda.set_device(local_rank): Pilih GPU yang ditentukan untuk proses ini.
model = torchvision.models. ResNet50 (pretrained=False).to(gpu): Muatkan model ResNet50 daripada model torchvision dan alihkannya ke gpu yang ditentukan.
ddp_model = DistributedDataParallel(model, device_ids=[local_rank]): Balut model dalam modul DistributedDataParallel, yang bermaksud bahawa kita boleh melakukan latihan teragih
Muatkan data CIFAR-10 Kumpul dan gunakan data transformasi pembesaran.
train_sampler=torch.utils.data.distributed.DistributedSampler(train_dataset,num_replicas=size,rank=rank): Buat objek DistributedSampler untuk memisahkan set data kepada berbilang GPU.
train_loader =torch.utils.data.DataLoader(dataset=train_dataset,batch_size=batch_size_per_gpu,shuffle=False,num_workers=0,pin_memory=True,sampler=train_sampler): Buat objek DataLoa akan dimuatkan dalam kelompok Dalam model, ini konsisten dengan langkah latihan biasa kami, kecuali pensampelan data teragih DistributedSampler ditambah.
Latih model untuk bilangan zaman yang ditentukan dan kemas kini pemberat menggunakan optimizer.step() dalam cara yang diedarkan.
pangkat0 menyimpan pusat pemeriksaan pada penghujung setiap pusingan.
pangkat0 menunjukkan kehilangan dan masa latihan setiap 10 kelompok.
Pada akhir latihan, jumlah masa yang dihabiskan untuk mencetak model latihan juga berada dalam kedudukan0.
Ujian kod
telah dilatih pada 1 nod dengan 1/2/3/4 GPU, 2 nod dengan 6/8 GPU dan setiap nod dengan 3/4 GPU Ujian Resnet50 dihidupkan Cifar10 ditunjukkan dalam rajah di bawah Saiz kelompok setiap ujian tetap sama. Masa yang diambil untuk menyelesaikan setiap ujian direkodkan dalam beberapa saat. Apabila bilangan GPU yang digunakan meningkat, masa yang diperlukan untuk menyelesaikan ujian berkurangan. Apabila menggunakan 8 GPU, ia mengambil masa 320 saat untuk diselesaikan, yang merupakan masa terpantas yang direkodkan. Ini sudah pasti, tetapi kita dapat melihat bahawa kelajuan latihan tidak meningkat secara linear dengan peningkatan bilangan GPU Ini mungkin kerana Resnet50 adalah model yang agak kecil dan tidak memerlukan latihan selari.

Menggunakan keselarian data pada berbilang GPU boleh mengurangkan dengan ketara masa yang diperlukan untuk melatih rangkaian saraf dalam (DNN) pada set data tertentu. Apabila bilangan GPU meningkat, masa yang diperlukan untuk menyelesaikan proses latihan berkurangan, menunjukkan bahawa DNN boleh dilatih dengan lebih cekap secara selari.
Pendekatan ini amat berguna apabila berurusan dengan set data yang besar atau seni bina DNN yang kompleks. Dengan memanfaatkan berbilang GPU, proses latihan boleh dipercepatkan, membolehkan lelaran dan percubaan model yang lebih pantas. Walau bagaimanapun, perlu diingatkan bahawa peningkatan prestasi yang dicapai melalui Data Parallelism mungkin dihadkan oleh faktor seperti overhed komunikasi dan had memori GPU, dan memerlukan penalaan berhati-hati untuk mendapatkan hasil yang terbaik.
Atas ialah kandungan terperinci Latihan selari PyTorch Contoh kod lengkap DistributedDataParallel. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

AI Hentai Generator
Menjana ai hentai secara percuma.

Artikel Panas
Alat panas

Notepad++7.3.1
Editor kod yang mudah digunakan dan percuma

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

Hantar Studio 13.0.1
Persekitaran pembangunan bersepadu PHP yang berkuasa

Dreamweaver CS6
Alat pembangunan web visual

SublimeText3 versi Mac
Perisian penyuntingan kod peringkat Tuhan (SublimeText3)
Topik panas
 1377
1377
 52
52

 Kaedah dan langkah untuk menggunakan BERT untuk analisis sentimen dalam Python
Jan 22, 2024 pm 04:24 PM
Kaedah dan langkah untuk menggunakan BERT untuk analisis sentimen dalam Python
Jan 22, 2024 pm 04:24 PM
BERT ialah model bahasa pembelajaran mendalam pra-latihan yang dicadangkan oleh Google pada 2018. Nama penuh ialah BidirectionalEncoderRepresentationsfromTransformers, yang berdasarkan seni bina Transformer dan mempunyai ciri pengekodan dwiarah. Berbanding dengan model pengekodan sehala tradisional, BERT boleh mempertimbangkan maklumat kontekstual pada masa yang sama semasa memproses teks, jadi ia berfungsi dengan baik dalam tugas pemprosesan bahasa semula jadi. Dwiarahnya membolehkan BERT memahami dengan lebih baik hubungan semantik dalam ayat, dengan itu meningkatkan keupayaan ekspresif model. Melalui kaedah pra-latihan dan penalaan halus, BERT boleh digunakan untuk pelbagai tugas pemprosesan bahasa semula jadi, seperti analisis sentimen, penamaan.
 Analisis fungsi pengaktifan AI yang biasa digunakan: amalan pembelajaran mendalam Sigmoid, Tanh, ReLU dan Softmax
Dec 28, 2023 pm 11:35 PM
Analisis fungsi pengaktifan AI yang biasa digunakan: amalan pembelajaran mendalam Sigmoid, Tanh, ReLU dan Softmax
Dec 28, 2023 pm 11:35 PM
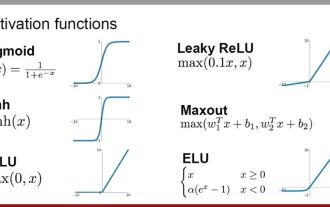
Fungsi pengaktifan memainkan peranan penting dalam pembelajaran mendalam Ia boleh memperkenalkan ciri tak linear ke dalam rangkaian saraf, membolehkan rangkaian belajar dengan lebih baik dan mensimulasikan hubungan input-output yang kompleks. Pemilihan dan penggunaan fungsi pengaktifan yang betul mempunyai kesan penting terhadap prestasi dan hasil latihan rangkaian saraf Artikel ini akan memperkenalkan empat fungsi pengaktifan yang biasa digunakan: Sigmoid, Tanh, ReLU dan Softmax, bermula dari pengenalan, senario penggunaan, kelebihan, kelemahan dan penyelesaian pengoptimuman Dimensi dibincangkan untuk memberi anda pemahaman yang menyeluruh tentang fungsi pengaktifan. 1. Fungsi Sigmoid Pengenalan kepada formula fungsi SIgmoid: Fungsi Sigmoid ialah fungsi tak linear yang biasa digunakan yang boleh memetakan sebarang nombor nyata antara 0 dan 1. Ia biasanya digunakan untuk menyatukan
 Di luar ORB-SLAM3! SL-SLAM: Adegan bertekstur lemah ringan, kegelisahan teruk dan lemah semuanya dikendalikan
May 30, 2024 am 09:35 AM
Di luar ORB-SLAM3! SL-SLAM: Adegan bertekstur lemah ringan, kegelisahan teruk dan lemah semuanya dikendalikan
May 30, 2024 am 09:35 AM
Ditulis sebelum ini, hari ini kita membincangkan bagaimana teknologi pembelajaran mendalam boleh meningkatkan prestasi SLAM berasaskan penglihatan (penyetempatan dan pemetaan serentak) dalam persekitaran yang kompleks. Dengan menggabungkan kaedah pengekstrakan ciri dalam dan pemadanan kedalaman, di sini kami memperkenalkan sistem SLAM visual hibrid serba boleh yang direka untuk meningkatkan penyesuaian dalam senario yang mencabar seperti keadaan cahaya malap, pencahayaan dinamik, kawasan bertekstur lemah dan seks yang teruk. Sistem kami menyokong berbilang mod, termasuk konfigurasi monokular, stereo, monokular-inersia dan stereo-inersia lanjutan. Selain itu, ia juga menganalisis cara menggabungkan SLAM visual dengan kaedah pembelajaran mendalam untuk memberi inspirasi kepada penyelidikan lain. Melalui percubaan yang meluas pada set data awam dan data sampel sendiri, kami menunjukkan keunggulan SL-SLAM dari segi ketepatan kedudukan dan keteguhan penjejakan.
 Pembenaman ruang terpendam: penjelasan dan demonstrasi
Jan 22, 2024 pm 05:30 PM
Pembenaman ruang terpendam: penjelasan dan demonstrasi
Jan 22, 2024 pm 05:30 PM
Pembenaman Ruang Terpendam (LatentSpaceEmbedding) ialah proses memetakan data berdimensi tinggi kepada ruang berdimensi rendah. Dalam bidang pembelajaran mesin dan pembelajaran mendalam, pembenaman ruang terpendam biasanya merupakan model rangkaian saraf yang memetakan data input berdimensi tinggi ke dalam set perwakilan vektor berdimensi rendah ini sering dipanggil "vektor terpendam" atau "terpendam pengekodan". Tujuan pembenaman ruang terpendam adalah untuk menangkap ciri penting dalam data dan mewakilinya ke dalam bentuk yang lebih ringkas dan mudah difahami. Melalui pembenaman ruang terpendam, kami boleh melakukan operasi seperti memvisualisasikan, mengelaskan dan mengelompokkan data dalam ruang dimensi rendah untuk memahami dan menggunakan data dengan lebih baik. Pembenaman ruang terpendam mempunyai aplikasi yang luas dalam banyak bidang, seperti penjanaan imej, pengekstrakan ciri, pengurangan dimensi, dsb. Pembenaman ruang terpendam adalah yang utama
 Fahami dalam satu artikel: kaitan dan perbezaan antara AI, pembelajaran mesin dan pembelajaran mendalam
Mar 02, 2024 am 11:19 AM
Fahami dalam satu artikel: kaitan dan perbezaan antara AI, pembelajaran mesin dan pembelajaran mendalam
Mar 02, 2024 am 11:19 AM
Dalam gelombang perubahan teknologi yang pesat hari ini, Kecerdasan Buatan (AI), Pembelajaran Mesin (ML) dan Pembelajaran Dalam (DL) adalah seperti bintang terang, menerajui gelombang baharu teknologi maklumat. Ketiga-tiga perkataan ini sering muncul dalam pelbagai perbincangan dan aplikasi praktikal yang canggih, tetapi bagi kebanyakan peneroka yang baru dalam bidang ini, makna khusus dan hubungan dalaman mereka mungkin masih diselubungi misteri. Jadi mari kita lihat gambar ini dahulu. Dapat dilihat bahawa terdapat korelasi rapat dan hubungan progresif antara pembelajaran mendalam, pembelajaran mesin dan kecerdasan buatan. Pembelajaran mendalam ialah bidang khusus pembelajaran mesin dan pembelajaran mesin
 Super kuat! 10 algoritma pembelajaran mendalam teratas!
Mar 15, 2024 pm 03:46 PM
Super kuat! 10 algoritma pembelajaran mendalam teratas!
Mar 15, 2024 pm 03:46 PM
Hampir 20 tahun telah berlalu sejak konsep pembelajaran mendalam dicadangkan pada tahun 2006. Pembelajaran mendalam, sebagai revolusi dalam bidang kecerdasan buatan, telah melahirkan banyak algoritma yang berpengaruh. Jadi, pada pendapat anda, apakah 10 algoritma teratas untuk pembelajaran mendalam? Berikut adalah algoritma teratas untuk pembelajaran mendalam pada pendapat saya Mereka semua menduduki kedudukan penting dari segi inovasi, nilai aplikasi dan pengaruh. 1. Latar belakang rangkaian saraf dalam (DNN): Rangkaian saraf dalam (DNN), juga dipanggil perceptron berbilang lapisan, adalah algoritma pembelajaran mendalam yang paling biasa Apabila ia mula-mula dicipta, ia dipersoalkan kerana kesesakan kuasa pengkomputeran tahun, kuasa pengkomputeran, Kejayaan datang dengan letupan data. DNN ialah model rangkaian saraf yang mengandungi berbilang lapisan tersembunyi. Dalam model ini, setiap lapisan menghantar input ke lapisan seterusnya dan
 Untuk menyediakan tanda aras dan sistem penilaian menjawab soalan saintifik dan kompleks baharu untuk model besar, UNSW, Argonne, University of Chicago dan institusi lain bersama-sama melancarkan rangka kerja SciQAG
Jul 25, 2024 am 06:42 AM
Untuk menyediakan tanda aras dan sistem penilaian menjawab soalan saintifik dan kompleks baharu untuk model besar, UNSW, Argonne, University of Chicago dan institusi lain bersama-sama melancarkan rangka kerja SciQAG
Jul 25, 2024 am 06:42 AM
Editor |ScienceAI Question Answering (QA) set data memainkan peranan penting dalam mempromosikan penyelidikan pemprosesan bahasa semula jadi (NLP). Set data QA berkualiti tinggi bukan sahaja boleh digunakan untuk memperhalusi model, tetapi juga menilai dengan berkesan keupayaan model bahasa besar (LLM), terutamanya keupayaan untuk memahami dan menaakul tentang pengetahuan saintifik. Walaupun pada masa ini terdapat banyak set data QA saintifik yang meliputi bidang perubatan, kimia, biologi dan bidang lain, set data ini masih mempunyai beberapa kekurangan. Pertama, borang data adalah agak mudah, kebanyakannya adalah soalan aneka pilihan. Ia mudah dinilai, tetapi mengehadkan julat pemilihan jawapan model dan tidak dapat menguji sepenuhnya keupayaan model untuk menjawab soalan saintifik. Sebaliknya, Soal Jawab terbuka
 Daripada asas kepada amalan, semak sejarah pembangunan pengambilan vektor Elasticsearch
Oct 23, 2023 pm 05:17 PM
Daripada asas kepada amalan, semak sejarah pembangunan pengambilan vektor Elasticsearch
Oct 23, 2023 pm 05:17 PM
1. Pengenalan Pengambilan semula vektor telah menjadi komponen teras sistem carian dan pengesyoran moden. Ia membolehkan pemadanan pertanyaan dan pengesyoran yang cekap dengan menukar objek kompleks (seperti teks, imej atau bunyi) kepada vektor berangka dan melakukan carian persamaan dalam ruang berbilang dimensi. Daripada asas kepada amalan, semak semula sejarah pembangunan vektor retrieval_elasticsearch Elasticsearch Sebagai enjin carian sumber terbuka yang popular, pembangunan Elasticsearch dalam pengambilan vektor sentiasa menarik perhatian ramai. Artikel ini akan menyemak sejarah pembangunan pengambilan vektor Elasticsearch, memfokuskan pada ciri dan kemajuan setiap peringkat. Mengambil sejarah sebagai panduan, adalah mudah untuk semua orang mewujudkan rangkaian penuh pengambilan vektor Elasticsearch.
