
 Peranti teknologi
AI
Artikel yang menerangkan teknologi ujian sistem persepsi pemanduan pintar secara terperinci
Peranti teknologi
AI
Artikel yang menerangkan teknologi ujian sistem persepsi pemanduan pintar secara terperinci
Artikel yang menerangkan teknologi ujian sistem persepsi pemanduan pintar secara terperinci

Kata Pengantar
Dengan kemajuan kecerdasan buatan serta teknologi perisian dan perkakasannya, pemanduan autonomi telah berkembang pesat sejak beberapa tahun kebelakangan ini. Sistem pemanduan autonomi telah digunakan dalam sistem bantuan pemandu kenderaan awam, robot logistik autonomi, dron dan bidang lain. Komponen persepsi adalah teras sistem pemanduan autonomi, yang membolehkan kenderaan menganalisis dan memahami maklumat tentang persekitaran trafik dalaman dan luaran. Walau bagaimanapun, seperti sistem perisian lain, sistem persepsi pemanduan autonomi dibelenggu oleh kelemahan perisian. Selain itu, sistem pemanduan autonomi beroperasi dalam senario kritikal keselamatan, dan kecacatan perisiannya boleh membawa kepada akibat bencana. Dalam beberapa tahun kebelakangan ini, terdapat banyak kematian dan kecederaan yang disebabkan oleh kecacatan pada sistem pemanduan autonomi. Teknologi ujian sistem pemanduan berautonomi telah mendapat perhatian yang meluas daripada ahli akademik dan industri. Perusahaan dan institusi penyelidikan telah mencadangkan satu siri teknologi dan persekitaran termasuk ujian simulasi maya, ujian jalan hidup sebenar dan gabungan ujian maya dan sebenar. Walau bagaimanapun, disebabkan kekhususan jenis data input dan kepelbagaian persekitaran operasi sistem pemanduan autonomi, pelaksanaan jenis teknologi ujian ini memerlukan sumber yang berlebihan dan memerlukan risiko yang lebih besar. Artikel ini menganalisis secara ringkas penyelidikan semasa dan status aplikasi kaedah ujian sistem persepsi pemanduan autonomi.
1 Ujian sistem persepsi pemanduan autonomi
Jaminan kualiti sistem persepsi pemanduan autonomi menjadi semakin penting. Sistem persepsi perlu membantu kenderaan menganalisis dan memahami maklumat keadaan jalan secara automatik, komposisinya sangat kompleks, dan ia perlu untuk menguji sepenuhnya kebolehpercayaan dan keselamatan sistem yang diuji dalam banyak senario trafik. Ujian persepsi pemanduan autonomi semasa terbahagi terutamanya kepada tiga kategori. Tidak kira apa jenis kaedah ujian, ia menunjukkan ciri penting yang berbeza daripada ujian tradisional, iaitu, pergantungan yang kuat pada data ujian.
Jenis ujian pertama adalah berdasarkan teori kejuruteraan perisian dan kaedah formal, dsb., dan mengambil mekanisme struktur model pelaksanaan sistem persepsi sebagai titik masuk. Kaedah ujian ini berdasarkan pemahaman peringkat tinggi tentang mekanisme pengendalian dan ciri sistem persepsi pemanduan autonomi. Tujuan ujian logik sistem persepsi berat sebelah ini adalah untuk menemui kelemahan reka bentuk modul persepsi pada peringkat awal pembangunan sistem untuk memastikan keberkesanan algoritma model dalam lelaran sistem awal. Berdasarkan ciri-ciri model algoritma pemanduan autonomi, para penyelidik mencadangkan satu siri penjanaan data ujian, penunjuk pengesahan ujian, kaedah penilaian ujian dan teknologi.
Kaedah simulasi maya ujian jenis kedua menggunakan komputer untuk mengabstrak sistem trafik sebenar untuk menyelesaikan tugas ujian, termasuk ujian sistem dalam persekitaran maya pratetap atau ujian bebas komponen persepsi. Kesan ujian simulasi maya bergantung kepada realiti persekitaran maya, kualiti data ujian dan teknologi pelaksanaan ujian khusus Ia adalah perlu untuk mempertimbangkan sepenuhnya keberkesanan kaedah pembinaan persekitaran simulasi, penilaian kualiti data dan teknologi pengesahan ujian. Persepsi persekitaran pemanduan autonomi dan model analisis adegan bergantung pada data pemandangan trafik yang berkesan berskala besar untuk latihan dan pengesahan ujian. Penyelidik dalam dan luar negara telah menjalankan banyak penyelidikan tentang adegan lalu lintas dan teknologi penjanaan struktur data mereka. Gunakan kaedah seperti mutasi data, penjanaan enjin simulasi dan pemaparan model permainan untuk membina data adegan ujian maya untuk mendapatkan data ujian berkualiti tinggi, dan gunakan data ujian yang dijana berbeza untuk model pemanduan autonomi serta penguatan dan peningkatan data. Senario ujian dan penjanaan data ialah teknologi utama. Kes ujian mestilah cukup kaya untuk menampung ruang keadaan sampel ujian. Sampel ujian perlu dijana dalam keadaan trafik yang melampau untuk menguji keselamatan model keluaran keputusan sistem di bawah kes penggunaan sempadan ini. Ujian maya selalunya menggabungkan teori dan teknologi ujian sedia ada untuk membina kaedah yang berkesan untuk menilai dan mengesahkan kesan ujian.
Kategori ketiga ialah ujian jalan bagi kenderaan sebenar yang dilengkapi sistem persepsi pemanduan autonomi, termasuk ujian pemandangan tertutup pratetap dan ujian keadaan jalan sebenar. Kelebihan ujian jenis ini ialah ujian dalam persekitaran sebenar dapat menjamin sepenuhnya kesahihan keputusan. Walau bagaimanapun, kaedah jenis ini mempunyai kesukaran seperti senario ujian yang sukar untuk memenuhi keperluan yang pelbagai, kesukaran mendapatkan sampel data pemandangan trafik yang berkaitan, kos anotasi manual yang tinggi bagi data pengumpulan jalan sebenar, kualiti anotasi tidak sekata, keperluan perbatuan ujian yang berlebihan, dan kitaran pengumpulan data terlalu lama, dsb. Terdapat risiko keselamatan dalam pemanduan manual dalam senario berbahaya, dan sukar bagi penguji untuk menyelesaikan masalah ini di dunia nyata. Pada masa yang sama, data pemandangan trafik juga mengalami masalah seperti sumber data tunggal dan kepelbagaian data yang tidak mencukupi, yang tidak mencukupi untuk memenuhi keperluan ujian dan pengesahan penyelidik pemanduan autonomi dalam kejuruteraan perisian. Walaupun begitu, ujian jalan raya merupakan bahagian yang tidak boleh diketepikan dalam ujian kereta tradisional dan amat penting dalam ujian persepsi pemanduan autonomi.
Dari perspektif jenis ujian, ujian sistem persepsi mempunyai kandungan ujian yang berbeza untuk kitaran hayat pembangunan kenderaan. Ujian pemanduan autonomi boleh dibahagikan kepada ujian model-in-the-loop (MiL), ujian perisian-dalam-gelung (SiL), ujian perkakasan-dalam-gelung (HiL), dan kenderaan-dalam-gelung (ViL) ujian, dsb. Artikel ini memfokuskan pada bahagian berkaitan SiL dan HiL ujian sistem persepsi pemanduan autonomi. HiL termasuk peranti perkakasan persepsi, seperti kamera, lidar dan modul persepsi interaksi manusia-komputer. SiL menggunakan simulasi perisian untuk menggantikan data yang dihasilkan oleh perkakasan sebenar. Tujuan kedua-dua ujian adalah untuk mengesahkan kefungsian, prestasi, kekukuhan dan kebolehpercayaan sistem pemanduan autonomi. Untuk objek ujian tertentu, jenis ujian yang berbeza digabungkan dengan teknologi ujian yang berbeza pada setiap peringkat pembangunan sistem persepsi untuk melengkapkan keperluan pengesahan yang sepadan. Maklumat persepsi pemanduan autonomi semasa terutamanya datang daripada analisis beberapa jenis data utama, termasuk imej (kamera), awan titik (lidar), dan sistem persepsi gabungan. Artikel ini terutamanya menganalisis ujian persepsi bagi ketiga-tiga jenis data ini.
2 Ujian Sistem Imej Pemanduan Autonomi
Imej yang dikumpul oleh pelbagai jenis kamera ialah salah satu jenis data input yang paling penting untuk persepsi pemanduan autonomi . Data imej boleh memberikan maklumat persekitaran pandangan hadapan, pandangan sekeliling, pandangan belakang dan pandangan sisi semasa kenderaan berjalan, dan membantu sistem pemanduan autonomi mencapai fungsi seperti julat jalan, pengecaman dan pengesanan sasaran serta analisis perubahan lorong automatik . Data imej datang dalam pelbagai format, seperti imej RGB, imej semantik, imej kedalaman, dsb. Format imej ini mempunyai ciri tersendiri Sebagai contoh, imej RGB mempunyai maklumat warna yang lebih kaya, imej kedalaman medan mengandungi lebih banyak maklumat kedalaman pemandangan, dan imej semantik diperoleh berdasarkan pengelasan piksel, yang lebih bermanfaat untuk pengesanan sasaran dan tugas pengesanan. .
Pengujian sistem persepsi pemanduan autonomi berasaskan imej bergantung pada imej pemandangan trafik yang berkesan berskala besar untuk latihan dan pengesahan ujian. Walau bagaimanapun, kos pelabelan manual bagi data pengumpulan jalan sebenar adalah tinggi, kitaran pengumpulan data terlalu panjang, undang-undang dan peraturan untuk pemanduan manual dalam adegan berbahaya adalah tidak sempurna, dan kualiti pelabelan tidak sekata. Pada masa yang sama, data pemandangan trafik juga dipengaruhi oleh faktor seperti sumber data tunggal dan kepelbagaian data yang tidak mencukupi, yang tidak mencukupi untuk memenuhi keperluan ujian dan pengesahan penyelidikan pemanduan autonomi.
Penyelidik dalam dan luar negara telah menjalankan banyak penyelidikan mengenai pembinaan dan teknologi penjanaan data pemandangan trafik, menggunakan kaedah seperti mutasi data, rangkaian penjanaan lawan, penjanaan enjin simulasi dan model permainan pemaparan untuk membina data senario untuk mendapatkan data ujian berkualiti tinggi, dan menggunakan data ujian yang dijana berbeza untuk model pemanduan autonomi dan peningkatan data. Menggunakan transformasi imej berkod keras untuk menghasilkan imej ujian adalah kaedah yang berkesan. Pelbagai transformasi matematik dan teknik pemprosesan imej boleh digunakan untuk memutasi imej asal untuk menguji potensi tingkah laku salah sistem pemanduan autonomi di bawah keadaan persekitaran yang berbeza.
Zhang et al menggunakan kaedah berasaskan rangkaian generatif lawan untuk transformasi gaya imej untuk mensimulasikan pemandangan pemanduan kenderaan di bawah keadaan persekitaran yang ditentukan. Sesetengah kajian melakukan ujian pemanduan autonomi dalam persekitaran maya, menggunakan model 3D daripada model simulasi fizikal untuk membina pemandangan lalu lintas dan menjadikannya imej 2D sebagai input kepada sistem persepsi. Imej ujian juga boleh dijana melalui sintesis, pensampelan kandungan yang boleh diubah suai dalam subruang imej berdimensi rendah dan melakukan sintesis imej Berbanding dengan mutasi langsung imej, pemandangan sintetik lebih kaya dan operasi gangguan imej adalah lebih bebas. Fremont et al. menggunakan bahasa pengaturcaraan khusus domain pemanduan autonomi Scenic untuk pra-reka bentuk senario ujian, menggunakan antara muka enjin permainan untuk menjana imej pemandangan trafik tertentu dan menggunakan imej yang diberikan untuk latihan dan pengesahan pada model pengesanan sasaran.
Pei et al menggunakan idea ujian pembezaan untuk mencari output yang tidak konsisten bagi model stereng pemanduan autonomi, dan juga dicadangkan menggunakan liputan neuron, iaitu neuron dalam saraf. rangkaian melebihi nisbah ambang pengaktifan pratetap yang diberikan untuk mengukur keberkesanan sampel ujian. Berdasarkan liputan saraf, penyelidik juga telah mencadangkan banyak konsep liputan ujian baharu, seperti liputan sempadan neuron, liputan neuron yang kuat, liputan neuron hierarki, dsb. Di samping itu, menggunakan teknologi carian heuristik untuk mencari kes ujian sasaran juga merupakan kaedah yang berkesan Kesukaran utama terletak pada mereka bentuk penunjuk penilaian ujian untuk membimbing carian. Terdapat masalah biasa dalam ujian sistem imej pemanduan autonomi seperti kekurangan data berlabel untuk senario pemanduan khas. Pasukan ini mencadangkan kaedah pemilihan kes ujian rangkaian saraf dalam adaptif ATS, yang diilhamkan oleh idea ujian rawak penyesuaian dalam bidang ujian perisian, untuk menyelesaikan kos sumber manusia yang tinggi bagi pelabelan data ujian rangkaian saraf dalam dalam persepsi pemanduan autonomi sistem.

3 Ujian sistem lidar pemanduan autonomi
Lidar ialah penderia penting untuk sistem pemanduan autonomi, yang mampu mengukur jarak antara pemancar penderia dan sasaran jarak perambatan objek, dan menganalisis maklumat seperti jumlah tenaga pantulan pada permukaan objek sasaran, amplitud, frekuensi dan fasa spektrum gelombang pantulan. Data awan titik yang dikumpul dengan tepat menggambarkan skala tiga dimensi dan maklumat intensiti pantulan pelbagai objek dalam adegan pemanduan, yang boleh mengimbangi kekurangan bentuk data dan ketepatan kamera. Lidar memainkan peranan penting dalam tugas seperti pengesanan sasaran pemanduan autonomi dan pemetaan kedudukan, dan tidak boleh digantikan dengan penglihatan tunggal sahaja.
Sebagai sistem perisian pintar kompleks biasa, pemanduan autonomi mengambil maklumat persekitaran sekeliling yang ditangkap oleh lidar sebagai input, dan membuat pertimbangan melalui model kecerdasan buatan dalam modul persepsi, dan dikawal oleh perancangan sistem Akhir sekali, selesaikan pelbagai tugas pemanduan. Walaupun kerumitan tinggi model kecerdasan buatan memberikan sistem pemanduan autonomi keupayaan persepsi, teknologi ujian tradisional sedia ada bergantung pada pengumpulan manual dan anotasi data awan titik, yang mahal dan tidak cekap. Sebaliknya, data awan titik tidak teratur, tiada maklumat warna yang jelas, mudah diganggu oleh faktor cuaca, dan isyarat mudah dilemahkan, menjadikan kepelbagaian data awan titik amat penting semasa proses ujian.
Menguji sistem pemanduan autonomi berdasarkan lidar masih dalam peringkat awal. Kedua-dua ujian pemacu sebenar dan ujian simulasi mempunyai masalah seperti kos yang tinggi, kecekapan ujian yang rendah dan kecukupan ujian yang tidak terjamin. Memandangkan masalah yang dihadapi oleh sistem pemanduan autonomi seperti senario ujian yang boleh diubah, sistem perisian yang besar dan kompleks serta kos ujian yang besar, keupayaan untuk mencadangkan teknologi penjanaan data ujian berdasarkan pengetahuan domain adalah sangat penting untuk menjamin sistem pemanduan autonomi. .
Dari segi penjanaan data awan titik radar, Sallab et al memodelkan data awan titik radar dengan membina rangkaian lawan penjanaan konsistensi kitaran, dan menjalankan analisis ciri pada data simulasi untuk menjana baharu. Data awan titik. Yue et al. mencadangkan rangka kerja penjanaan data awan titik untuk adegan pemanduan autonomi ini memutasi data awan titik dalam adegan permainan berdasarkan objek beranotasi untuk mendapatkan data baharu yang mereka perolehi menggunakan kaedah ini Data melatih semula awan titik modul pemprosesan data sistem pemanduan autonomi dan mencapai peningkatan ketepatan yang lebih baik.
Pasukan ini mereka bentuk dan melaksanakan alat ujian automatik LiDAR, LiRTest, yang digunakan terutamanya untuk ujian automatik sistem pengesanan sasaran kenderaan autonomi, dan boleh dilatih semula untuk meningkatkan keteguhan sistem. LiRTest mula-mula mereka bentuk model fizikal dan geometri oleh pakar domain, dan kemudian membina operator transformasi berdasarkan model. Pembangun memilih benih awan titik daripada data dunia sebenar, menggunakan unit pemprosesan awan titik untuk mengenal pasti dan memprosesnya, dan melaksanakan algoritma mutasi berasaskan operator transformasi untuk menjana ujian yang menilai keteguhan model pengesanan sasaran 3D pemanduan autonomi. Akhir sekali, LiRTest mendapat laporan ujian dan memberi maklum balas tentang reka bentuk operator, dengan itu meningkatkan kualiti secara berulang.
Sistem pemanduan autonomi ialah sistem gabungan maklumat-fizikal yang tipikal Status pengendaliannya bukan sahaja ditentukan oleh maklumat input pengguna dan keadaan dalaman sistem perisian, tetapi juga dipengaruhi oleh persekitaran fizikal. Walaupun pada masa ini terdapat sejumlah kecil penyelidikan yang memfokuskan kepada masalah penjanaan data awan titik yang dipengaruhi oleh pelbagai faktor persekitaran, disebabkan oleh ciri-ciri data awan titik, keaslian data yang dihasilkan sukar untuk disamakan dengan data ujian pemacu. bagaimana untuk melakukan ini tanpa meningkatkan penggunaan sumber tambahan dengan ketara Dalam kes ini, menjana data awan titik secara automatik yang boleh menerangkan pelbagai faktor persekitaran sebenar adalah isu utama yang perlu diselesaikan.
Dalam seni bina perisian biasa bagi perisian pemanduan autonomi, model kecerdasan buatan mempunyai kesan yang sangat penting pada keputusan pemanduan dan tingkah laku sistem. Fungsi yang dipengaruhinya termasuk: pengecaman objek, perancangan laluan, tingkah laku Ramalan dll. Model kecerdasan buatan yang paling biasa digunakan untuk pemprosesan data awan titik ialah model pengesanan sasaran, yang dilaksanakan menggunakan rangkaian saraf dalam. Walaupun teknologi ini boleh mencapai ketepatan yang tinggi pada tugas tertentu, kerana kekurangan kebolehtafsiran keputusannya, pengguna dan pembangun tidak dapat menganalisis dan mengesahkan kelakuannya, yang membawa kesukaran kepada pembangunan teknologi ujian dan penilaian kecukupan ujian. Ini semua adalah cabaran yang perlu dihadapi oleh penguji model lidar masa depan.

4 Ujian Sistem Persepsi Gabungan Pemanduan Autonomi
Sistem pemanduan autonomi biasanya dilengkapi dengan pelbagai penderia untuk mengesan maklumat persekitaran, dan dilengkapi dengan pelbagai perisian dan algoritma untuk menyelesaikan pelbagai tugas pemanduan autonomi. Penderia yang berbeza mempunyai ciri fizikal yang berbeza dan senario aplikasinya juga berbeza. Teknologi pengesan gabungan boleh mengimbangi kebolehsuaian alam sekitar yang lemah bagi satu sensor, dan memastikan operasi normal sistem pemanduan autonomi di bawah pelbagai keadaan persekitaran melalui kerjasama berbilang penderia.
Disebabkan oleh cara merekod maklumat yang berbeza, terdapat saling melengkapi yang kuat antara pelbagai jenis penderia. Kos pemasangan kamera adalah rendah, dan data imej yang dikumpul mempunyai resolusi tinggi dan maklumat visual yang kaya seperti warna dan tekstur. Walau bagaimanapun, kamera sensitif kepada persekitaran dan mungkin tidak boleh dipercayai pada waktu malam, semasa cahaya terang dan perubahan cahaya lain. LiDAR, sebaliknya, tidak mudah dipengaruhi oleh perubahan cahaya dan memberikan persepsi tiga dimensi yang tepat pada waktu siang dan malam. Walau bagaimanapun, lidar adalah mahal dan data awan titik yang dikumpul tidak mempunyai maklumat warna, menjadikannya sukar untuk mengenal pasti sasaran tanpa bentuk yang jelas. Cara menggunakan kelebihan setiap data modal dan mendapatkan maklumat semantik yang lebih mendalam telah menjadi isu penting dalam teknologi penderiaan gabungan.
Penyelidik telah mencadangkan pelbagai kaedah gabungan data. Teknologi penderiaan gabungan lidar dan kamera berdasarkan pembelajaran mendalam telah menjadi hala tuju penyelidikan utama kerana ketepatannya yang tinggi. Feng et al meringkaskan secara ringkas kaedah gabungan kepada tiga jenis: peringkat awal, peringkat pertengahan dan gabungan peringkat akhir. Gabungan awal hanya menggabungkan data asal atau data pra-proses menggabungkan ciri-ciri data yang diekstrak oleh setiap cabang hanya menggabungkan hasil keluaran akhir setiap cawangan; Walaupun teknologi penderiaan bersatu berasaskan pembelajaran mendalam telah menunjukkan potensi besar dalam set data penanda aras sedia ada, model pintar tersebut mungkin masih mempamerkan tingkah laku melampau yang tidak betul dan tidak dijangka dalam senario dunia sebenar dengan persekitaran yang kompleks, yang membawa kepada kehilangan maut. Untuk memastikan keselamatan sistem pemanduan autonomi, model persepsi bercantum tersebut perlu diuji dengan teliti.
Pada masa ini, teknologi ujian penderiaan bersatu masih dalam peringkat awal Domain input ujian yang besar dan kos pengumpulan data yang tinggi adalah masalah utama yang diterima oleh teknologi penjanaan data ujian automatik perhatian yang meluas. Wang et al. mencadangkan algoritma peningkatan data rentas modal yang memasukkan objek maya ke dalam imej dan awan titik mengikut peraturan ketekalan geometri untuk menjana set data ujian. Zhang et al. mencadangkan kaedah peningkatan data berbilang mod yang menggunakan aliran transformasi berbilang mod untuk mengekalkan pemetaan yang betul antara awan titik dan piksel imej, dan berdasarkan ini, seterusnya mencadangkan kaedah peningkatan potong dan tampal berbilang mod.
Memandangkan kesan persekitaran yang kompleks dalam pemandangan sebenar pada penderia, pasukan kami mereka bentuk teknologi penguatan data untuk sistem pengesan gabungan pelbagai mod. Kaedah ini melibatkan pakar domain yang merumuskan satu set peraturan mutasi dengan semantik realistik untuk setiap data modal, dan menjana data ujian secara automatik untuk mensimulasikan pelbagai faktor yang mengganggu penderia dalam senario sebenar, dan membantu pembangun perisian menguji dan Menilai sistem penderiaan bercantum. Pengendali mutasi yang digunakan dalam kaedah ini termasuk tiga kategori: pengendali bunyi isyarat, pengendali penjajaran isyarat dan pengendali kehilangan isyarat, yang mensimulasikan pelbagai jenis gangguan yang wujud dalam adegan sebenar. Pengendali hingar merujuk kepada kehadiran hingar dalam data yang dikumpul disebabkan oleh pengaruh faktor persekitaran semasa proses pengumpulan data sensor. Contohnya, untuk data imej, operator seperti spot dan blur digunakan untuk mensimulasikan situasi apabila kamera menghadapi cahaya yang kuat dan bergegar. Operator penjajaran mensimulasikan penjajaran salah mod data berbilang mod, khususnya termasuk penjajaran masa dan penjajaran ruang. Untuk yang pertama, satu isyarat ditangguhkan secara rawak untuk mensimulasikan kesesakan atau kelewatan penghantaran. Bagi yang terakhir, pelarasan kecil dibuat pada parameter penentukuran setiap penderia untuk mensimulasikan sedikit perubahan dalam kedudukan penderia akibat kegelisahan kenderaan dan isu lain semasa kenderaan dalam perjalanan. Pengendali kehilangan isyarat mensimulasikan kegagalan sensor. Khususnya, selepas membuang satu isyarat secara rawak, perhatikan sama ada algoritma gabungan boleh bertindak balas dalam masa atau berfungsi seperti biasa.
Ringkasnya, teknologi persepsi gabungan berbilang sensor adalah trend yang tidak dapat dielakkan dalam pembangunan pemanduan autonomi Ujian lengkap adalah syarat yang diperlukan untuk memastikan sistem boleh berfungsi secara normal dalam keadaan sebenar yang kompleks persekitaran. Cara menggunakan sumber terhad Ujian yang mencukupi dalam rangkaian masih menjadi isu yang mendesak.
Kesimpulan
Ujian persepsi pemanduan autonomi sedang disepadukan rapat dengan proses pembangunan perisian pemanduan autonomi, dan pelbagai jenis ujian dalam gelung secara beransur-ansur akan menjadi komponen yang diperlukan dalam jaminan kualiti pemanduan autonomi. Dalam aplikasi perindustrian, ujian pemacu sebenar kekal penting. Walau bagaimanapun, terdapat masalah seperti kos yang berlebihan, kecekapan yang tidak mencukupi dan bahaya keselamatan yang tinggi, yang jauh daripada memenuhi keperluan ujian dan pengesahan sistem persepsi pintar pemanduan autonomi. Perkembangan pesat kaedah formal dan ujian maya simulasi dalam pelbagai cabang penyelidikan menyediakan cara yang berkesan untuk meningkatkan ujian Penyelidik sedang meneroka petunjuk dan teknologi ujian model yang sesuai untuk pemanduan pintar untuk menyediakan sokongan untuk kaedah ujian simulasi maya. Pasukan ini komited untuk menyelidik kaedah penjanaan, penilaian dan pengoptimuman data ujian persepsi pemanduan autonomi, memfokuskan pada penyelidikan mendalam mengenai tiga aspek berdasarkan imej, data awan titik dan ujian gabungan persepsi untuk memastikan sistem persepsi pemanduan autonomi berkualiti tinggi .
Atas ialah kandungan terperinci Artikel yang menerangkan teknologi ujian sistem persepsi pemanduan pintar secara terperinci. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

AI Hentai Generator
Menjana ai hentai secara percuma.

Artikel Panas
Alat panas

Notepad++7.3.1
Editor kod yang mudah digunakan dan percuma

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

Hantar Studio 13.0.1
Persekitaran pembangunan bersepadu PHP yang berkuasa

Dreamweaver CS6
Alat pembangunan web visual

SublimeText3 versi Mac
Perisian penyuntingan kod peringkat Tuhan (SublimeText3)
Topik panas
 1378
1378
 52
52

 Bagaimana untuk menyelesaikan masalah ekor panjang dalam senario pemanduan autonomi?
Jun 02, 2024 pm 02:44 PM
Bagaimana untuk menyelesaikan masalah ekor panjang dalam senario pemanduan autonomi?
Jun 02, 2024 pm 02:44 PM
Semalam semasa temu bual, saya telah ditanya sama ada saya telah membuat sebarang soalan berkaitan ekor panjang, jadi saya fikir saya akan memberikan ringkasan ringkas. Masalah ekor panjang pemanduan autonomi merujuk kepada kes tepi dalam kenderaan autonomi, iaitu, kemungkinan senario dengan kebarangkalian yang rendah untuk berlaku. Masalah ekor panjang yang dirasakan adalah salah satu sebab utama yang kini mengehadkan domain reka bentuk pengendalian kenderaan autonomi pintar satu kenderaan. Seni bina asas dan kebanyakan isu teknikal pemanduan autonomi telah diselesaikan, dan baki 5% masalah ekor panjang secara beransur-ansur menjadi kunci untuk menyekat pembangunan pemanduan autonomi. Masalah ini termasuk pelbagai senario yang berpecah-belah, situasi yang melampau dan tingkah laku manusia yang tidak dapat diramalkan. "Ekor panjang" senario tepi dalam pemanduan autonomi merujuk kepada kes tepi dalam kenderaan autonomi (AVs) kes Edge adalah senario yang mungkin dengan kebarangkalian yang rendah untuk berlaku. kejadian yang jarang berlaku ini
 Apakah pendapat anda tentang furmark - Bagaimanakah furmark dianggap layak?
Mar 19, 2024 am 09:25 AM
Apakah pendapat anda tentang furmark - Bagaimanakah furmark dianggap layak?
Mar 19, 2024 am 09:25 AM
Apakah pendapat anda tentang furmark? 1. Tetapkan "Mod Jalankan" dan "Mod Paparan" dalam antara muka utama, dan juga laraskan "Mod Ujian" dan klik butang "Mula". 2. Selepas menunggu seketika, anda akan melihat keputusan ujian, termasuk pelbagai parameter kad grafik. Bagaimanakah furmark layak? 1. Gunakan mesin pembakar furmark dan semak hasilnya selama kira-kira setengah jam Ia pada asasnya berlegar sekitar 85 darjah, dengan puncak 87 darjah dan suhu bilik 19 darjah. Casis besar, 5 port kipas casis, dua di hadapan, dua di atas, dan satu di belakang, tetapi hanya satu kipas dipasang. Semua aksesori tidak overclock. 2. Dalam keadaan biasa, suhu biasa kad grafik hendaklah antara "30-85℃". 3. Walaupun suhu ambien terlalu tinggi pada musim panas, suhu biasa ialah "50-85℃"
 Kertas Stable Diffusion 3 akhirnya telah dikeluarkan, dan butiran seni bina didedahkan Adakah ia akan membantu untuk menghasilkan semula Sora?
Mar 06, 2024 pm 05:34 PM
Kertas Stable Diffusion 3 akhirnya telah dikeluarkan, dan butiran seni bina didedahkan Adakah ia akan membantu untuk menghasilkan semula Sora?
Mar 06, 2024 pm 05:34 PM
Kertas StableDiffusion3 akhirnya di sini! Model ini dikeluarkan dua minggu lalu dan menggunakan seni bina DiT (DiffusionTransformer) yang sama seperti Sora. Ia menimbulkan kekecohan apabila ia dikeluarkan. Berbanding dengan versi sebelumnya, kualiti imej yang dijana oleh StableDiffusion3 telah dipertingkatkan dengan ketara Ia kini menyokong gesaan berbilang tema, dan kesan penulisan teks juga telah dipertingkatkan, dan aksara bercelaru tidak lagi muncul. StabilityAI menegaskan bahawa StableDiffusion3 ialah satu siri model dengan saiz parameter antara 800M hingga 8B. Julat parameter ini bermakna model boleh dijalankan terus pada banyak peranti mudah alih, dengan ketara mengurangkan penggunaan AI
 SOTA terbaharu nuScenes |. SparseAD: Pertanyaan jarang membantu pemanduan autonomi hujung ke hujung yang cekap!
Apr 17, 2024 pm 06:22 PM
SOTA terbaharu nuScenes |. SparseAD: Pertanyaan jarang membantu pemanduan autonomi hujung ke hujung yang cekap!
Apr 17, 2024 pm 06:22 PM
Ditulis di hadapan & titik permulaan Paradigma hujung ke hujung menggunakan rangka kerja bersatu untuk mencapai pelbagai tugas dalam sistem pemanduan autonomi. Walaupun kesederhanaan dan kejelasan paradigma ini, prestasi kaedah pemanduan autonomi hujung ke hujung pada subtugas masih jauh ketinggalan berbanding kaedah tugasan tunggal. Pada masa yang sama, ciri pandangan mata burung (BEV) padat yang digunakan secara meluas dalam kaedah hujung ke hujung sebelum ini menyukarkan untuk membuat skala kepada lebih banyak modaliti atau tugasan. Paradigma pemanduan autonomi hujung ke hujung (SparseAD) tertumpu carian jarang dicadangkan di sini, di mana carian jarang mewakili sepenuhnya keseluruhan senario pemanduan, termasuk ruang, masa dan tugas, tanpa sebarang perwakilan BEV yang padat. Khususnya, seni bina jarang bersatu direka bentuk untuk kesedaran tugas termasuk pengesanan, penjejakan dan pemetaan dalam talian. Di samping itu, berat
 FisheyeDetNet: algoritma pengesanan sasaran pertama berdasarkan kamera fisheye
Apr 26, 2024 am 11:37 AM
FisheyeDetNet: algoritma pengesanan sasaran pertama berdasarkan kamera fisheye
Apr 26, 2024 am 11:37 AM
Pengesanan objek ialah masalah yang agak matang dalam sistem pemanduan autonomi, antaranya pengesanan pejalan kaki adalah salah satu algoritma terawal untuk digunakan. Penyelidikan yang sangat komprehensif telah dijalankan dalam kebanyakan kertas kerja. Walau bagaimanapun, persepsi jarak menggunakan kamera fisheye untuk pandangan sekeliling agak kurang dikaji. Disebabkan herotan jejari yang besar, perwakilan kotak sempadan standard sukar dilaksanakan dalam kamera fisheye. Untuk mengurangkan perihalan di atas, kami meneroka kotak sempadan lanjutan, elips dan reka bentuk poligon am ke dalam perwakilan kutub/sudut dan mentakrifkan metrik mIOU pembahagian contoh untuk menganalisis perwakilan ini. Model fisheyeDetNet yang dicadangkan dengan bentuk poligon mengatasi model lain dan pada masa yang sama mencapai 49.5% mAP pada set data kamera fisheye Valeo untuk pemanduan autonomi
 Mari kita bincangkan tentang sistem pemanduan autonomi hujung ke hujung dan generasi seterusnya, serta beberapa salah faham tentang pemanduan autonomi hujung ke hujung?
Apr 15, 2024 pm 04:13 PM
Mari kita bincangkan tentang sistem pemanduan autonomi hujung ke hujung dan generasi seterusnya, serta beberapa salah faham tentang pemanduan autonomi hujung ke hujung?
Apr 15, 2024 pm 04:13 PM
Pada bulan lalu, atas sebab-sebab yang diketahui umum, saya telah mengadakan pertukaran yang sangat intensif dengan pelbagai guru dan rakan sekelas dalam industri. Topik yang tidak dapat dielakkan dalam pertukaran secara semula jadi adalah hujung ke hujung dan Tesla FSDV12 yang popular. Saya ingin mengambil kesempatan ini untuk menyelesaikan beberapa buah fikiran dan pendapat saya pada masa ini untuk rujukan dan perbincangan anda. Bagaimana untuk mentakrifkan sistem pemanduan autonomi hujung ke hujung, dan apakah masalah yang sepatutnya dijangka diselesaikan hujung ke hujung? Menurut definisi yang paling tradisional, sistem hujung ke hujung merujuk kepada sistem yang memasukkan maklumat mentah daripada penderia dan secara langsung mengeluarkan pembolehubah yang membimbangkan tugas. Sebagai contoh, dalam pengecaman imej, CNN boleh dipanggil hujung-ke-hujung berbanding kaedah pengekstrak ciri + pengelas tradisional. Dalam tugas pemanduan autonomi, masukkan data daripada pelbagai penderia (kamera/LiDAR
 DualBEV: mengatasi BEVFormer dan BEVDet4D dengan ketara, buka buku!
Mar 21, 2024 pm 05:21 PM
DualBEV: mengatasi BEVFormer dan BEVDet4D dengan ketara, buka buku!
Mar 21, 2024 pm 05:21 PM
Kertas kerja ini meneroka masalah mengesan objek dengan tepat dari sudut pandangan yang berbeza (seperti perspektif dan pandangan mata burung) dalam pemanduan autonomi, terutamanya cara mengubah ciri dari perspektif (PV) kepada ruang pandangan mata burung (BEV) dengan berkesan dilaksanakan melalui modul Transformasi Visual (VT). Kaedah sedia ada secara amnya dibahagikan kepada dua strategi: penukaran 2D kepada 3D dan 3D kepada 2D. Kaedah 2D-ke-3D meningkatkan ciri 2D yang padat dengan meramalkan kebarangkalian kedalaman, tetapi ketidakpastian yang wujud dalam ramalan kedalaman, terutamanya di kawasan yang jauh, mungkin menimbulkan ketidaktepatan. Manakala kaedah 3D ke 2D biasanya menggunakan pertanyaan 3D untuk mencuba ciri 2D dan mempelajari berat perhatian bagi kesesuaian antara ciri 3D dan 2D melalui Transformer, yang meningkatkan masa pengiraan dan penggunaan.
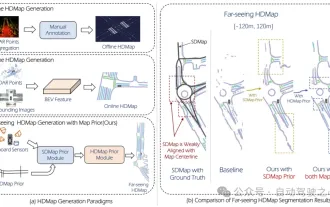 Pembunuh pengeluaran besar-besaran! P-Mapnet: Menggunakan peta SDMap berketepatan rendah sebelum ini, prestasi pemetaan dipertingkatkan dengan hampir 20 mata!
Mar 28, 2024 pm 02:36 PM
Pembunuh pengeluaran besar-besaran! P-Mapnet: Menggunakan peta SDMap berketepatan rendah sebelum ini, prestasi pemetaan dipertingkatkan dengan hampir 20 mata!
Mar 28, 2024 pm 02:36 PM
Seperti yang ditulis di atas, salah satu algoritma yang digunakan oleh sistem pemanduan autonomi semasa untuk menghilangkan pergantungan pada peta berketepatan tinggi adalah untuk mengambil kesempatan daripada fakta bahawa prestasi persepsi dalam julat jarak jauh masih lemah. Untuk tujuan ini, kami mencadangkan P-MapNet, di mana "P" memfokuskan pada menggabungkan peta sebelum untuk meningkatkan prestasi model. Khususnya, kami mengeksploitasi maklumat terdahulu dalam SDMap dan HDMap: di satu pihak, kami mengekstrak data SDMap yang sejajar dengan lemah daripada OpenStreetMap dan mengekodkannya ke dalam istilah bebas untuk menyokong input. Terdapat masalah penjajaran lemah antara input yang diubah suai dengan ketat dan HD+Map sebenar Struktur kami berdasarkan mekanisme Cross-attention boleh memfokus secara adaptif pada rangka SDMap dan membawa peningkatan prestasi yang ketara.
