
 Peranti teknologi
AI
Pembelajaran Mendalam Fizikal dengan Kaedah Latihan Diilhamkan Secara Biologi: Pendekatan Tanpa Gradien untuk Perkakasan Fizikal
Peranti teknologi
AI
Pembelajaran Mendalam Fizikal dengan Kaedah Latihan Diilhamkan Secara Biologi: Pendekatan Tanpa Gradien untuk Perkakasan Fizikal
Pembelajaran Mendalam Fizikal dengan Kaedah Latihan Diilhamkan Secara Biologi: Pendekatan Tanpa Gradien untuk Perkakasan Fizikal

Permintaan yang semakin meningkat untuk kecerdasan buatan telah mendorong penyelidikan ke dalam pengkomputeran tidak konvensional berdasarkan peranti fizikal. Walaupun peranti pengkomputeran tersebut meniru pemprosesan maklumat analog yang diilhamkan oleh otak, proses pembelajaran masih bergantung pada kaedah yang dioptimumkan untuk pemprosesan berangka, seperti perambatan belakang, yang tidak sesuai untuk pelaksanaan fizikal.
Di sini, pasukan penyelidik dari Makmal Teknologi Peranti NTT Jepun dan Universiti Tokyo dengan melanjutkan kaedah yang dipanggil penjajaran maklum balas langsung (DFA) algoritma latihan yang diilhamkan secara biologi untuk menunjukkan kedalaman fizikal pembelajaran. Tidak seperti algoritma asal, kaedah yang dicadangkan adalah berdasarkan unjuran rawak dengan pengaktifan bukan linear alternatif. Oleh itu, rangkaian saraf fizikal boleh dilatih tanpa pengetahuan tentang sistem fizikal dan kecerunannya. Tambahan pula, pengiraan latihan ini boleh disimulasikan pada perkakasan fizikal boleh skala.
Penyelidik menunjukkan bukti konsep menggunakan rangkaian neural berulang optoelektronik yang dipanggil komputer takungan dalam. Potensi untuk pengkomputeran dipercepatkan dengan prestasi kompetitif pada penanda aras ditunjukkan. Hasilnya menyediakan penyelesaian praktikal untuk latihan dan pecutan pengkomputeran neuromorfik.
Penyelidikan ini bertajuk "Pembelajaran mendalam fizikal dengan kaedah latihan yang diilhamkan secara biologi: pendekatan tanpa kecerunan untuk perkakasan fizikal" dan dikeluarkan pada 26 Disember 2022 Pada " Komunikasi Alam Semulajadi".
Pembelajaran Mendalam Fizikal
Prestasi pemecahan rekod pembelajaran mesin berasaskan rangkaian saraf tiruan (ANN) dalam pemprosesan imej, pengecaman pertuturan, permainan, dsb. telah berjaya menunjukkan kecemerlangannya. Walaupun algoritma ini menyerupai cara otak manusia berfungsi, ia pada dasarnya dilaksanakan pada peringkat perisian menggunakan perkakasan pengkomputeran von Neumann tradisional. Walau bagaimanapun, rangkaian neural tiruan berasaskan pengkomputeran digital tersebut menghadapi masalah dalam penggunaan tenaga dan kelajuan pemprosesan. Isu-isu ini mendorong penggunaan platform fizikal alternatif untuk pelaksanaan rangkaian saraf tiruan.
Menariknya, walaupun dinamik fizikal pasif boleh digunakan sebagai sumber pengiraan dalam ANN yang disambungkan secara rawak. Dikenali sebagai Physical Reservoir Computer (RC) atau Extreme Learning Machine (ELM), kemudahan pelaksanaan rangka kerja ini meluaskan pilihan bahan yang boleh dicapai dan julat aplikasinya. Rangkaian saraf (PNN) yang dilaksanakan secara fizikal sedemikian mampu menyumber luar beban pengiraan khusus tugas kepada sistem fizikal.
Membina rangkaian fizikal yang lebih mendalam ialah hala tuju yang menjanjikan untuk meningkatkan lagi prestasi, kerana mereka boleh mengembangkan keupayaan ekspresi rangkaian secara eksponen. Ini mendorong cadangan untuk PNN mendalam menggunakan pelbagai platform fizikal. Latihan mereka pada asasnya bergantung pada kaedah yang dipanggil backpropagation (BP), yang telah mencapai kejayaan besar dalam ANN berasaskan perisian. Walau bagaimanapun, BP tidak sesuai untuk PNN dalam aspek berikut. Pertama, pelaksanaan fizikal operasi BP kekal kompleks dan tidak berskala. Kedua, BP memerlukan pemahaman yang tepat tentang keseluruhan sistem fizikal. Tambahan pula, apabila kita menggunakan BP pada RC, keperluan ini menjejaskan sifat unik RC fizikal, iaitu kita perlu memahami dan mensimulasikan rangkaian stokastik fizikal kotak hitam dengan tepat.
Seperti BP dalam PNN, kesukaran mengendalikan BP dalam rangkaian saraf biologi juga telah ditunjukkan oleh komuniti sains otak, rasionaliti BP dalam otak telah dipersoalkan. Pertimbangan ini telah membawa kepada pembangunan algoritma latihan yang baik secara biologi.
Hala tuju yang menjanjikan dalam masa terdekat ialah Penjajaran Maklum Balas Langsung (DFA). Dalam algoritma ini, transformasi linear rawak tetap bagi isyarat ralat lapisan keluaran akhir digunakan untuk menggantikan isyarat ralat terbalik. Oleh itu, kaedah ini tidak memerlukan perambatan lapisan demi lapisan bagi isyarat ralat atau pengetahuan tentang pemberat. Tambahan pula, DFA dilaporkan boleh berskala kepada model rangkaian besar moden. Kejayaan latihan bermotivasi biologi ini menunjukkan bahawa terdapat cara yang lebih sesuai untuk melatih PNN daripada BP. Walau bagaimanapun, DFA masih memerlukan derivatif f'(a) bagi fungsi tak linear f(x) untuk latihan, yang menghalang penggunaan kaedah DFA dalam sistem fizikal. Oleh itu, penskalaan DFA yang lebih besar adalah penting untuk aplikasi PNN.
DFA dan peningkatannya untuk pembelajaran mendalam fizik
Di sini, penyelidik menunjukkan pembelajaran mendalam fizik dengan mempertingkatkan algoritma DFA. Dalam DFA yang dipertingkatkan, kami menggantikan terbitan pengaktifan tak linear fizikal f'(a) dalam DFA standard dengan g(a) tak linear arbitrari dan menunjukkan bahawa prestasi adalah teguh kepada pilihan g(a). Disebabkan oleh peningkatan ini, ia tidak lagi perlu untuk memodelkan f'(a) dengan tepat. Memandangkan kaedah yang dicadangkan adalah berdasarkan unjuran stokastik selari dengan pengaktifan tak linear sewenang-wenangnya, pengiraan latihan boleh dilakukan pada sistem fizikal dengan cara yang sama seperti konsep ELM atau RC fizikal. Ini membolehkan pecutan fizikal inferens dan latihan.

Rajah: Konsep PNN dan latihannya melalui BP dan DFA tambahan. (Sumber: kertas)
Untuk menunjukkan bukti konsep, penyelidik membina RC fizik kedalaman optoelektronik berbantukan FPGA sebagai meja kerja. Walaupun benchtop mudah digunakan dan boleh digunakan pada pelbagai platform fizikal dengan hanya kemas kini peringkat perisian, ia mencapai prestasi yang setanding dengan sistem canggih yang besar dan kompleks.

Rajah: Sistem RC kedalaman optoelektronik dengan latihan DFA yang dipertingkatkan. (Sumber: kertas)
Di samping itu, keseluruhan masa pemprosesan, termasuk masa pemprosesan digital, telah dibandingkan, dan kemungkinan pecutan fizikal proses latihan ditemui .

Rajah: Prestasi sistem RC dalam optoelektronik. (Sumber: Kertas)
Pecahan belanjawan masa pemprosesan bangku RC adalah seperti berikut: Pemprosesan FPGA (pemindahan data, peruntukan memori dan DAC/ADC) ~92%; 8% daripada pemprosesan digital digunakan untuk pra-/pasca pemprosesan. Oleh itu, pada peringkat semasa, masa pemprosesan didominasi oleh pengiraan berangka pada FPGA dan CPU. Ini kerana bangku optoelektronik melaksanakan satu takungan menggunakan hanya satu talian tunda tak linear ini boleh dilonggarkan dengan menggunakan perkakasan pengkomputeran selari sepenuhnya dan semua optik pada masa hadapan. Seperti yang dapat dilihat, pengiraan pada CPU dan GPU menunjukkan arah aliran O(N^2) untuk bilangan nod, manakala atas bangku menunjukkan O(N), yang disebabkan oleh kesesakan pemindahan data.
Pecutan fizikal di luar CPU diperhatikan pada N ~5,000 dan ~12,000 untuk algoritma BP dan DFA yang dipertingkatkan, masing-masing. Walau bagaimanapun, dari segi kelajuan pengiraan, keberkesanan terhadap GPU tidak diperhatikan secara langsung kerana had ingatannya. Dengan mengekstrapolasi arah aliran GPU, kelajuan fizik ke atas GPU boleh diperhatikan pada N ~80,000. Untuk pengetahuan kami, ini adalah perbandingan pertama keseluruhan proses latihan dan demonstrasi pertama pecutan latihan fizikal menggunakan PNN.
Untuk mengkaji kebolehgunaan kaedah yang dicadangkan kepada sistem lain, simulasi berangka telah dilakukan menggunakan rangkaian neural fotonik yang dikaji secara meluas. Tambahan pula, RC berasaskan kelewatan yang ditunjukkan secara eksperimen ditunjukkan sangat sesuai untuk pelbagai sistem fizikal. Berkenaan skalabiliti sistem fizikal, isu utama dalam membina rangkaian dalam adalah bunyi yang wujud. Kesan bunyi dikaji melalui simulasi berangka. Sistem itu didapati teguh kepada bunyi bising.
Skalabiliti dan had pendekatan yang dicadangkan
Di sini, kebolehskalaan pendekatan berasaskan DFA kepada model yang lebih moden dipertimbangkan. Salah satu model yang paling biasa digunakan untuk pembelajaran mendalam praktikal ialah rangkaian neural convolutional tersambung dalam (CNN). Walau bagaimanapun, telah dilaporkan bahawa algoritma DFA sukar digunakan untuk CNN standard. Oleh itu, kaedah yang dicadangkan mungkin sukar untuk digunakan pada PNN konvolusi dengan cara yang mudah.
Kesesuaian pada SNN juga merupakan topik penting memandangkan pelaksanaan perkakasan simulasi. Kebolehgunaan latihan berasaskan DFA kepada SNN telah dilaporkan, yang bermaksud bahawa DFA yang dipertingkatkan yang dicadangkan dalam kajian ini dapat menjadikan latihan lebih mudah.
Walaupun algoritma berasaskan DFA berpotensi untuk diperluaskan kepada model yang lebih praktikal daripada MLP atau RC mudah, keberkesanan menggunakan latihan berasaskan DFA pada rangkaian tersebut masih tidak diketahui. Di sini, sebagai kerja tambahan kepada kajian ini, kebolehskalaan latihan berasaskan DFA (DFA sendiri dan DFA dipertingkat) kepada model yang disebutkan di atas (MLP-Mixer, Vision transformer (ViT), ResNet dan SNN) disiasat. Latihan berasaskan DFA didapati berkesan walaupun untuk model praktikal penerokaan. Walaupun ketepatan latihan berasaskan DFA yang boleh dicapai pada dasarnya adalah lebih rendah daripada latihan BP, beberapa pelarasan pada model dan/atau algoritma boleh meningkatkan prestasi. Terutamanya, ketepatan DFA dan DFA tambahan adalah setanding untuk semua tetapan percubaan yang diterokai, menunjukkan bahawa penambahbaikan lanjut dalam DFA itu sendiri akan secara langsung menyumbang kepada peningkatan DFA ditambah. Keputusan menunjukkan bahawa kaedah itu boleh diperluaskan kepada pelaksanaan model praktikal PNN pada masa hadapan, bukan hanya model MLP atau RC mudah.
Jadual 1: Kebolehgunaan DFA yang dipertingkatkan kepada model rangkaian sebenar. (Sumber: kertas)

BP dan DFA dalam perkakasan fizikal
Secara umumnya, BP sangat sukar untuk dilaksanakan pada perkakasan fizikal kerana ia memerlukan semua maklumat dalam graf pengiraan. Oleh itu, latihan mengenai perkakasan fizikal sentiasa dilakukan melalui simulasi pengiraan, yang menanggung kos pengiraan yang besar. Tambahan pula, perbezaan antara model dan sistem sebenar membawa kepada pengurangan ketepatan. Sebaliknya, DFA yang dipertingkatkan tidak memerlukan pengetahuan terdahulu yang tepat tentang sistem fizikal. Oleh itu, dalam PNN mendalam, kaedah berasaskan DFA adalah lebih berkesan daripada kaedah berasaskan BP dari segi ketepatan. Selain itu, perkakasan fizikal boleh digunakan untuk mempercepatkan pengiraan.
Selain itu, latihan DFA tidak memerlukan penyebaran ralat berurutan yang dikira lapisan demi lapisan, yang bermaksud bahawa latihan setiap lapisan boleh dilakukan secara selari. Oleh itu, pelaksanaan DFA yang lebih optimum dan selari boleh membawa kepada percepatan yang lebih ketara. Ciri unik ini menunjukkan keberkesanan kaedah berasaskan DFA, terutamanya untuk rangkaian saraf berdasarkan perkakasan fizikal. Sebaliknya, ketepatan model terlatih DFA yang dipertingkatkan masih lebih rendah daripada model terlatih BP. Meningkatkan lagi ketepatan latihan berasaskan DFA kekal pada masa hadapan.
Kelajuan fizik selanjutnya
Pelaksanaan fizik menunjukkan kelajuan pemprosesan gelung RC dengan nombor nod besar. Walau bagaimanapun, kelebihannya masih terhad dan penambahbaikan lanjut diperlukan. Masa pemprosesan prototaip semasa dinyatakan sebagai pemindahan data dan peruntukan memori kepada FPGA. Oleh itu, menyepadukan semua proses ke dalam FPGA akan meningkatkan prestasi dengan mengorbankan fleksibiliti percubaan. Tambahan pula, pada masa hadapan, kaedah optik bawaan udara akan mengurangkan kos penghantaran dengan ketara. Penyepaduan optik berskala besar dan penyepaduan pada cip akan meningkatkan lagi prestasi pengkomputeran optik itu sendiri.
Atas ialah kandungan terperinci Pembelajaran Mendalam Fizikal dengan Kaedah Latihan Diilhamkan Secara Biologi: Pendekatan Tanpa Gradien untuk Perkakasan Fizikal. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

AI Hentai Generator
Menjana ai hentai secara percuma.

Artikel Panas
Alat panas

Notepad++7.3.1
Editor kod yang mudah digunakan dan percuma

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

Hantar Studio 13.0.1
Persekitaran pembangunan bersepadu PHP yang berkuasa

Dreamweaver CS6
Alat pembangunan web visual

SublimeText3 versi Mac
Perisian penyuntingan kod peringkat Tuhan (SublimeText3)
Topik panas
 1378
1378
 52
52

 Sumber terbuka! Di luar ZoeDepth! DepthFM: Anggaran kedalaman monokular yang cepat dan tepat!
Apr 03, 2024 pm 12:04 PM
Sumber terbuka! Di luar ZoeDepth! DepthFM: Anggaran kedalaman monokular yang cepat dan tepat!
Apr 03, 2024 pm 12:04 PM
0. Apakah fungsi artikel ini? Kami mencadangkan DepthFM: model anggaran kedalaman monokular generatif yang serba boleh dan pantas. Sebagai tambahan kepada tugas anggaran kedalaman tradisional, DepthFM juga menunjukkan keupayaan terkini dalam tugas hiliran seperti mengecat kedalaman. DepthFM cekap dan boleh mensintesis peta kedalaman dalam beberapa langkah inferens. Mari kita baca karya ini bersama-sama ~ 1. Tajuk maklumat kertas: DepthFM: FastMonocularDepthEstimationwithFlowMatching Pengarang: MingGui, JohannesS.Fischer, UlrichPrestel, PingchuanMa, Dmytr
 Tinggalkan seni bina pengekod-penyahkod dan gunakan model resapan untuk pengesanan tepi, yang lebih berkesan Universiti Teknologi Pertahanan Nasional mencadangkan DiffusionEdge
Feb 07, 2024 pm 10:12 PM
Tinggalkan seni bina pengekod-penyahkod dan gunakan model resapan untuk pengesanan tepi, yang lebih berkesan Universiti Teknologi Pertahanan Nasional mencadangkan DiffusionEdge
Feb 07, 2024 pm 10:12 PM
Rangkaian pengesanan tepi dalam semasa biasanya menggunakan seni bina penyahkod pengekod, yang mengandungi modul pensampelan atas dan bawah untuk mengekstrak ciri berbilang peringkat dengan lebih baik. Walau bagaimanapun, struktur ini mengehadkan rangkaian untuk mengeluarkan hasil pengesanan tepi yang tepat dan terperinci. Sebagai tindak balas kepada masalah ini, kertas kerja mengenai AAAI2024 menyediakan penyelesaian baharu. Tajuk tesis: DiffusionEdge:DiffusionProbabilisticModelforCrispEdgeDetection Penulis: Ye Yunfan (Universiti Teknologi Pertahanan Nasional), Xu Kai (Universiti Teknologi Pertahanan Kebangsaan), Huang Yuxing (Universiti Teknologi Pertahanan Nasional), Yi Renjiao (Universiti Teknologi Pertahanan Nasional), Cai Zhiping (Universiti Teknologi Pertahanan Negara) Pautan kertas: https ://ar
 Tongyi Qianwen adalah sumber terbuka sekali lagi, Qwen1.5 membawakan enam model volum, dan prestasinya melebihi GPT3.5
Feb 07, 2024 pm 10:15 PM
Tongyi Qianwen adalah sumber terbuka sekali lagi, Qwen1.5 membawakan enam model volum, dan prestasinya melebihi GPT3.5
Feb 07, 2024 pm 10:15 PM
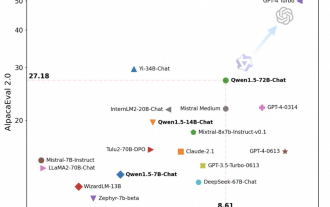
Pada masanya untuk Festival Musim Bunga, versi 1.5 Model Tongyi Qianwen (Qwen) berada dalam talian. Pagi ini, berita versi baharu itu menarik perhatian komuniti AI. Versi baharu model besar termasuk enam saiz model: 0.5B, 1.8B, 4B, 7B, 14B dan 72B. Antaranya, prestasi versi terkuat mengatasi GPT3.5 dan Mistral-Medium. Versi ini termasuk model Base dan model Sembang, dan menyediakan sokongan berbilang bahasa. Pasukan Tongyi Qianwen Alibaba menyatakan bahawa teknologi yang berkaitan juga telah dilancarkan di laman web rasmi Tongyi Qianwen dan Apl Tongyi Qianwen. Selain itu, keluaran Qwen 1.5 hari ini juga mempunyai sorotan berikut: menyokong panjang konteks 32K membuka pusat pemeriksaan model Base+Chat;
 YOLO adalah abadi! YOLOv9 dikeluarkan: prestasi dan kelajuan SOTA~
Feb 26, 2024 am 11:31 AM
YOLO adalah abadi! YOLOv9 dikeluarkan: prestasi dan kelajuan SOTA~
Feb 26, 2024 am 11:31 AM
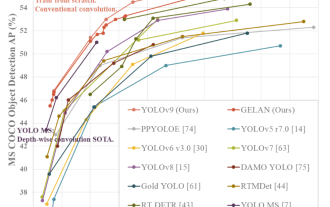
Kaedah pembelajaran mendalam hari ini memberi tumpuan kepada mereka bentuk fungsi objektif yang paling sesuai supaya keputusan ramalan model paling hampir dengan situasi sebenar. Pada masa yang sama, seni bina yang sesuai mesti direka bentuk untuk mendapatkan maklumat yang mencukupi untuk ramalan. Kaedah sedia ada mengabaikan fakta bahawa apabila data input mengalami pengekstrakan ciri lapisan demi lapisan dan transformasi spatial, sejumlah besar maklumat akan hilang. Artikel ini akan menyelidiki isu penting apabila menghantar data melalui rangkaian dalam, iaitu kesesakan maklumat dan fungsi boleh balik. Berdasarkan ini, konsep maklumat kecerunan boleh atur cara (PGI) dicadangkan untuk menghadapi pelbagai perubahan yang diperlukan oleh rangkaian dalam untuk mencapai pelbagai objektif. PGI boleh menyediakan maklumat input lengkap untuk tugas sasaran untuk mengira fungsi objektif, dengan itu mendapatkan maklumat kecerunan yang boleh dipercayai untuk mengemas kini berat rangkaian. Di samping itu, rangka kerja rangkaian ringan baharu direka bentuk
 Hello, Atlas elektrik! Robot Boston Dynamics hidup semula, gerakan pelik 180 darjah menakutkan Musk
Apr 18, 2024 pm 07:58 PM
Hello, Atlas elektrik! Robot Boston Dynamics hidup semula, gerakan pelik 180 darjah menakutkan Musk
Apr 18, 2024 pm 07:58 PM
Boston Dynamics Atlas secara rasmi memasuki era robot elektrik! Semalam, Atlas hidraulik hanya "menangis" menarik diri daripada peringkat sejarah Hari ini, Boston Dynamics mengumumkan bahawa Atlas elektrik sedang berfungsi. Nampaknya dalam bidang robot humanoid komersial, Boston Dynamics berazam untuk bersaing dengan Tesla. Selepas video baharu itu dikeluarkan, ia telah pun ditonton oleh lebih sejuta orang dalam masa sepuluh jam sahaja. Orang lama pergi dan peranan baru muncul. Ini adalah keperluan sejarah. Tidak dinafikan bahawa tahun ini adalah tahun letupan robot humanoid. Netizen mengulas: Kemajuan robot telah menjadikan majlis pembukaan tahun ini kelihatan seperti manusia, dan tahap kebebasan adalah jauh lebih besar daripada manusia Tetapi adakah ini benar-benar bukan filem seram? Pada permulaan video, Atlas berbaring dengan tenang di atas tanah, seolah-olah terlentang. Apa yang berikut adalah rahang-jatuh
 Versi Kuaishou Sora 'Ke Ling' dibuka untuk ujian: menghasilkan video lebih 120-an, memahami fizik dengan lebih baik dan boleh memodelkan pergerakan kompleks dengan tepat
Jun 11, 2024 am 09:51 AM
Versi Kuaishou Sora 'Ke Ling' dibuka untuk ujian: menghasilkan video lebih 120-an, memahami fizik dengan lebih baik dan boleh memodelkan pergerakan kompleks dengan tepat
Jun 11, 2024 am 09:51 AM
Apa? Adakah Zootopia dibawa menjadi realiti oleh AI domestik? Didedahkan bersama-sama dengan video itu ialah model penjanaan video domestik berskala besar baharu yang dipanggil "Keling". Sora menggunakan laluan teknikal yang serupa dan menggabungkan beberapa inovasi teknologi yang dibangunkan sendiri untuk menghasilkan video yang bukan sahaja mempunyai pergerakan yang besar dan munasabah, tetapi juga mensimulasikan ciri-ciri dunia fizikal dan mempunyai keupayaan gabungan konsep dan imaginasi yang kuat. Mengikut data, Keling menyokong penjanaan video ultra panjang sehingga 2 minit pada 30fps, dengan resolusi sehingga 1080p dan menyokong berbilang nisbah aspek. Satu lagi perkara penting ialah Keling bukanlah demo atau demonstrasi hasil video yang dikeluarkan oleh makmal, tetapi aplikasi peringkat produk yang dilancarkan oleh Kuaishou, pemain terkemuka dalam bidang video pendek. Selain itu, tumpuan utama adalah untuk menjadi pragmatik, bukan untuk menulis cek kosong, dan pergi ke dalam talian sebaik sahaja ia dikeluarkan Model besar Ke Ling telah pun dikeluarkan di Kuaiying.
 Daya hidup kecerdasan super membangkitkan! Tetapi dengan kedatangan AI yang mengemas kini sendiri, ibu tidak perlu lagi bimbang tentang kesesakan data
Apr 29, 2024 pm 06:55 PM
Daya hidup kecerdasan super membangkitkan! Tetapi dengan kedatangan AI yang mengemas kini sendiri, ibu tidak perlu lagi bimbang tentang kesesakan data
Apr 29, 2024 pm 06:55 PM
Saya menangis hingga mati. Dunia sedang membina model besar. Data di Internet tidak mencukupi. Model latihan kelihatan seperti "The Hunger Games", dan penyelidik AI di seluruh dunia bimbang tentang cara memberi makan data ini kepada pemakan yang rakus. Masalah ini amat ketara dalam tugas berbilang modal. Pada masa mereka mengalami kerugian, pasukan pemula dari Jabatan Universiti Renmin China menggunakan model baharu mereka sendiri untuk menjadi yang pertama di China untuk menjadikan "suapan data yang dijana model itu sendiri" menjadi kenyataan. Selain itu, ia merupakan pendekatan serampang dua mata dari segi pemahaman dan sisi penjanaan Kedua-dua pihak boleh menjana data baharu berbilang modal yang berkualiti tinggi dan memberikan maklum balas data kepada model itu sendiri. Apakah model? Awaker 1.0, model berbilang modal besar yang baru sahaja muncul di Forum Zhongguancun. Siapa pasukan itu? Enjin Sophon. Diasaskan oleh Gao Yizhao, pelajar kedoktoran di Sekolah Kecerdasan Buatan Hillhouse Universiti Renmin.
 Tentera Udara A.S. mempamerkan jet pejuang AI pertamanya dengan profil tinggi! Menteri secara peribadi menjalankan pandu uji tanpa campur tangan semasa keseluruhan proses, dan 100,000 baris kod telah diuji selama 21 kali.
May 07, 2024 pm 05:00 PM
Tentera Udara A.S. mempamerkan jet pejuang AI pertamanya dengan profil tinggi! Menteri secara peribadi menjalankan pandu uji tanpa campur tangan semasa keseluruhan proses, dan 100,000 baris kod telah diuji selama 21 kali.
May 07, 2024 pm 05:00 PM
Baru-baru ini, bulatan tentera telah terharu dengan berita: jet pejuang tentera AS kini boleh melengkapkan pertempuran udara automatik sepenuhnya menggunakan AI. Ya, baru-baru ini, jet pejuang AI tentera AS telah didedahkan buat pertama kali, mendedahkan misterinya. Nama penuh pesawat pejuang ini ialah Variable Stability Simulator Test Aircraft (VISTA). Ia diterbangkan sendiri oleh Setiausaha Tentera Udara AS untuk mensimulasikan pertempuran udara satu lawan satu. Pada 2 Mei, Setiausaha Tentera Udara A.S. Frank Kendall berlepas menggunakan X-62AVISTA di Pangkalan Tentera Udara Edwards Ambil perhatian bahawa semasa penerbangan selama satu jam, semua tindakan penerbangan telah diselesaikan secara autonomi oleh AI! Kendall berkata - "Sejak beberapa dekad yang lalu, kami telah memikirkan tentang potensi tanpa had pertempuran udara-ke-udara autonomi, tetapi ia sentiasa kelihatan di luar jangkauan." Namun kini,
