
 Peranti teknologi
AI
Bincangkan status semasa dan trend perkembangan teknologi ramalan trajektori pemanduan autonomi
Peranti teknologi
AI
Bincangkan status semasa dan trend perkembangan teknologi ramalan trajektori pemanduan autonomi
Bincangkan status semasa dan trend perkembangan teknologi ramalan trajektori pemanduan autonomi

1 Apakah ramalan trajektori
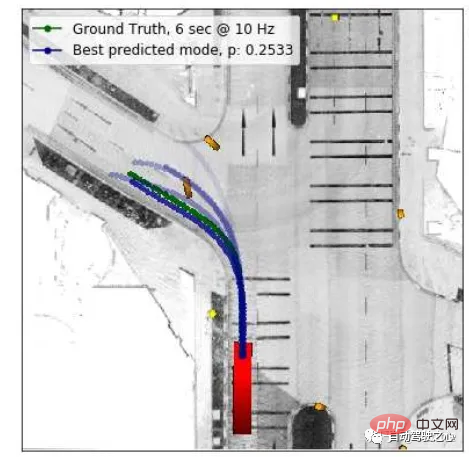
Dalam pemanduan autonomi, ramalan trajektori biasanya terletak di hujung belakang modul persepsi, dan hujung hadapan peraturan ialah modul penghubung. Masukkan maklumat keadaan dan maklumat struktur jalan bagi landasan sasaran yang disediakan oleh modul persepsi, pertimbangkan secara menyeluruh maklumat peta berketepatan tinggi, maklumat interaksi antara sasaran, maklumat semantik persekitaran dan maklumat niat sasaran, dan buat niat untuk pelbagai sasaran yang dilihat . Ramalan (potong masuk/keluar, lurus ke hadapan) dan ramalan trajektori untuk tempoh masa akan datang (julat dari 0-5s). Seperti yang ditunjukkan di bawah.
Sistem ADAS memerlukan kebolehan kognitif tertentu bagi maklumat persekitaran di sekeliling Tahap yang paling asas adalah untuk mengenali persekitaran, dan tahap seterusnya memerlukan Buat ramalan tentang alam sekitar. Selepas meramalkan sasaran, pengawal boleh merancang laluan kenderaan berdasarkan maklumat yang diramalkan, dan membuat keputusan untuk brek atau mengeluarkan amaran untuk kemungkinan situasi berbahaya. Ini adalah kepentingan modul ramalan trajektori.
2 Dua Cabaran
Ramalan trajektori boleh dibahagikan kepada ramalan jangka pendek dan ramalan jangka panjang.
- Ramalan jangka pendek secara amnya berdasarkan model kinematik (CV/CA/CTRV/CTRA) berdasarkan maklumat keadaan sasaran semasa untuk meramal trajektori untuk tempoh masa pada masa hadapan Secara amnya
- Ramalan jangka panjang ialah perkara yang sedang dilakukan oleh industri pada masa ini. Ramalan jenis ini tidak sesuai hanya berdasarkan model gerakan Secara amnya, ramalan niat diperlukan dan digabungkan dengan beberapa maklumat kontekstual (peta, maklumat interaksi antara sasaran) untuk mendapatkan hasil yang baik. Pada masa ini, terdapat banyak bentuk keluaran yang berbeza dalam industri, seperti mengeluarkan taburan kebarangkalian trajektori, mengeluarkan berbilang trajektori yang diramalkan dan mengeluarkan trajektori yang paling mungkin diramalkan.
Terdapat dua cabaran untuk ramalan trajektori jangka panjang:
- Keluarkan trajektori yang mungkin atau keluarkan semua trajektori yang mungkin Trajektori semuanya tidak munasabah. Jika anda mengeluarkan trajektori yang diramalkan, anda mungkin terlepas trajektori sebenar Jika anda mengeluarkan semua trajektori yang mungkin, akan ada penggera palsu Ini tidak boleh diterima untuk sistem ADAS. Pertimbangan harus diberikan untuk mengehadkan trajektori yang diramalkan kepada subset yang sesuai.
- Semakin banyak yang anda lakukan pada ramalan trajektori, semakin banyak andaian yang perlu anda buat. Andaian yang melampau ialah menganggap semua objek di jalan raya mematuhi peraturan lalu lintas. Ini adalah munasabah jika digunakan untuk fungsi simulasi trafik, tetapi tidak sesuai untuk sistem ADAS, yang perlu sensitif kepada situasi yang berpotensi berbahaya.
Ketidakpastian yang mempengaruhi ramalan trajektori jangka panjang terutamanya datang dari tiga aspek:
- Keluaran penderiaan modul Anggaran keadaan sasaran tidak pasti.
- Ketidakpastian dalam memacu ramalan niat.
- Ketidakpastian antara pengecaman niat dan perubahan mobiliti kenderaan.
3 Pertimbangan utama
Empat isu yang perlu dipertimbangkan untuk sistem ramalan trajektori:
- Ramalan trajektori mestilah sensitif terhadap potensi bahaya, yang diperlukan mengikut maksud ramalan trajektori.
- Adalah perlu untuk mempertimbangkan kedua-dua model berjalan dan maklumat tentang niat dan persekitaran sekeliling.
- Pertimbangkan ketidakpastian di atas.
- Pertimbangkan bilangan trajektori output.
4 kaedah industri
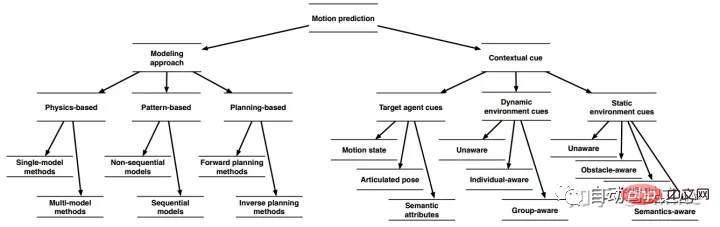
Rajah berikut menunjukkan kaedah pengelasan dalam kertas ulasan [2] yang diterbitkan oleh Bosch .
- Jika dikelaskan mengikut model berbeza yang digunakan, kaedah ramalan trajektori boleh dibahagikan kepada kaedah menggunakan model fizikal, kaedah menggunakan pembelajaran dan kaedah menggunakan algoritma perancangan.
- Jika dikelaskan mengikut maklumat yang digunakan, kaedah ramalan trajektori boleh dibahagikan kepada kaedah yang menggunakan maklumat sasaran, kaedah yang menggunakan maklumat sasaran dinamik dalam persekitaran dan kaedah yang menggunakan maklumat persekitaran statik .
Apakah algoritma umum yang terlibat dalam ramalan trajektori?
- Ramalan niat: teori kabur, BN statik, DBN (HMM, JumpMM), teori bukti DS, algoritma pengelasan dalam pembelajaran mesin.
- Berkaitan pembelajaran mendalam, keluaran hujung ke hujung. CNN, LSTM, RNN, Perhatian.
Apakah maklumat khusus yang boleh digunakan untuk ramalan trajektori?
- Maklumat sasaran: maklumat kelajuan dan kedudukan semasa/sejarah Jika ia adalah ramalan trajektori pejalan kaki, orientasi kepala pejalan kaki, maklumat bersama, maklumat jantina dan umur juga boleh. digunakan.
- Maklumat sasaran dinamik dalam persekitaran: daya sosial, tarikan, maklumat kekangan kumpulan.
- Maklumat persekitaran statik: ruang kosong, peta, maklumat semantik (struktur jalan/peraturan lalu lintas/lampu isyarat semasa).
Terdapat lebih banyak kertas mengenai ramalan trajektori dalam akademik Sebab utamanya ialah tiada kaedah yang berkesan dalam industri.
Berikut ialah kertas industri:
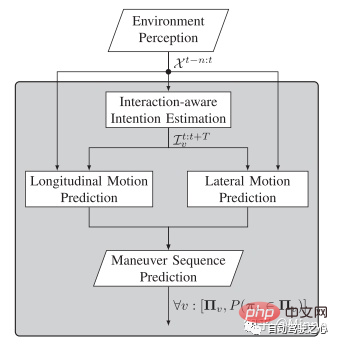
BMW: Model Fizik + ramalan niat (berasaskan pembelajaran). Gunakan kaedah heuristik untuk mengintegrasikan pengetahuan pakar, memudahkan model interaksi, dan menambah idea teori permainan kepada model klasifikasi ramalan niat [3].
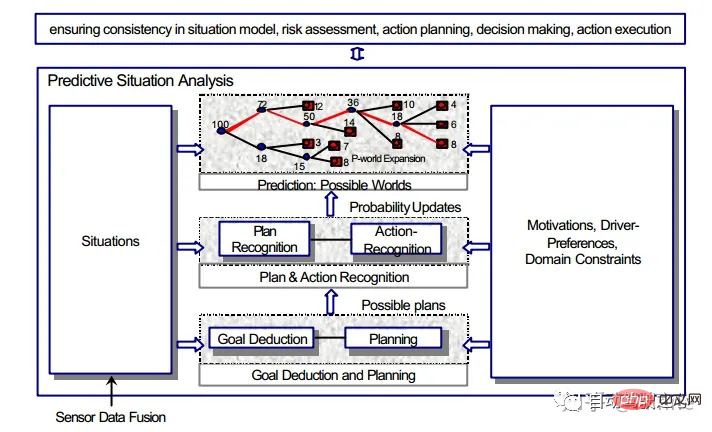
BENZ: Terutamanya kertas berkaitan ramalan niat, menggunakan DBN[4] .
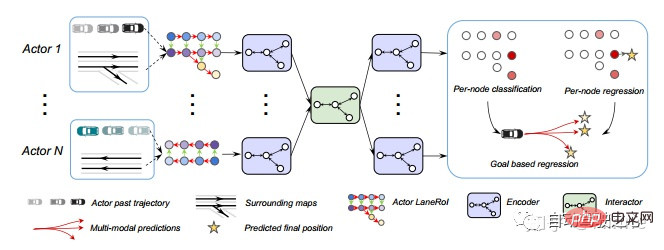
Uber: LaneRCNN[5].
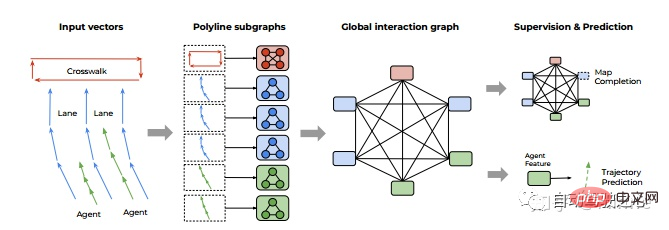
Google: VectorNet[6].
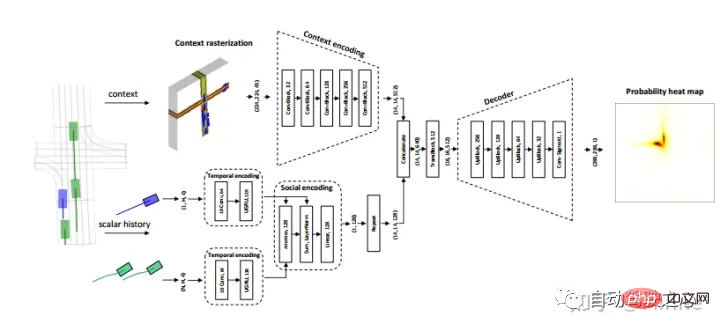
Huawei: HOME[7].
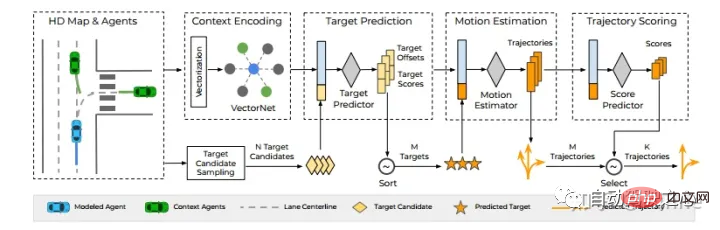
Waymo: TNT[8].
Aktif: Covernet[9].
NEC: R2P2[10].
SenseTime: TPNet[11].
Meituan: StarNet[12]. pejalan kaki.
Aibee: Sophie[13]. pejalan kaki.
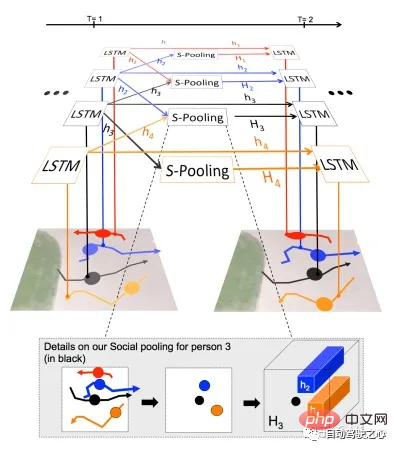
MIT: Sosial lstm[14]. pejalan kaki.
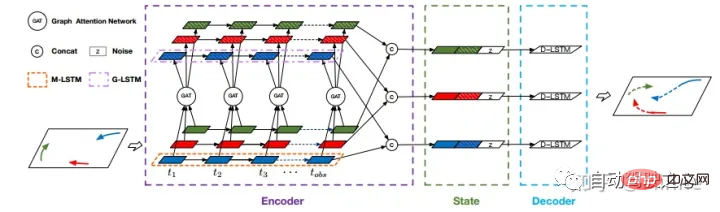
Universiti Sains dan Teknologi China: STGAT[15]. pejalan kaki.
Baidu: Lorong-Perhatian[16].
Apollo: Anda boleh lihat blog berikut untuk rujukan.
https://www.cnblogs.com/liuzubing/p/11388485.html
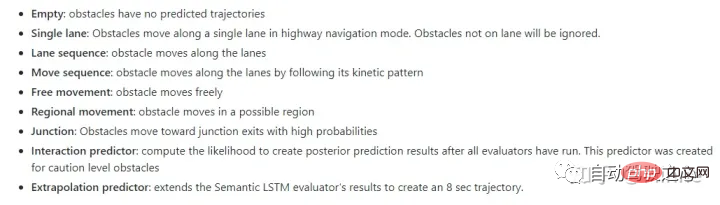
Modul ramalan Apollo menerima persepsi, Kedudukan dan input modul peta.
1. Mula-mula, adegan itu dibahagikan kepada dua babak: jalan pelayaran biasa dan persimpangan.
2. Kemudian bahagikan kepentingan sasaran yang dilihat kepada sasaran yang boleh diabaikan (tidak akan menjejaskan kereta anda sendiri) dan sasaran yang perlu dikendalikan dengan berhati-hati (mungkin menjejaskan anda sendiri kereta). benteng) dan sasaran biasa (di antaranya).
3. Kemudian masukkan Penilai, yang pada asasnya adalah ramalan niat.
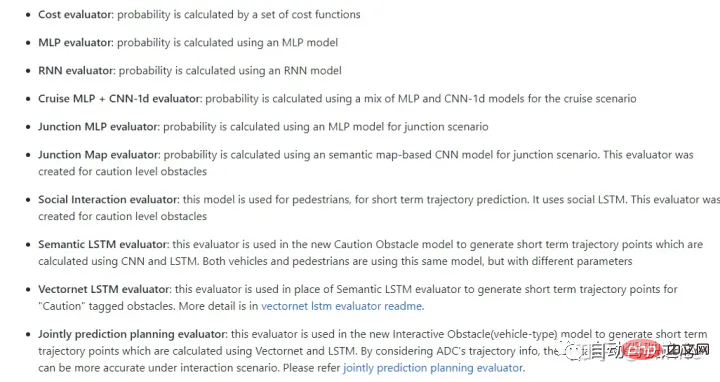
4. Akhir sekali masukkan peramal, yang digunakan untuk meramalkan penjanaan trajektori. Lakukan operasi berbeza untuk senario berbeza seperti sasaran pegun, memandu di sepanjang jalan, freeMove dan persimpangan.
5 Set Data
(1) NGSIM
Set data ini ialah data pemanduan lebuh raya yang dikumpul oleh FHWA di Amerika Syarikat, termasuk keadaan pemanduan semua kenderaan di US101, I-80 dan jalan lain dalam tempoh masa. Data diperoleh menggunakan kamera dan kemudian diproses menjadi rekod titik jejak satu persatu. Set datanya ialah fail CSV. Data tidak mempunyai banyak bunyi.
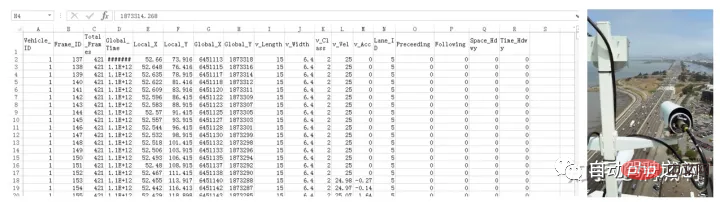
Ia lebih kepada maklumat tahap penghantaran keseluruhan, seperti perancangan jalan, penetapan lorong, pelarasan aliran trafik, dsb. Keadaan kinematik kenderaan perlu diekstrak lagi. Kod pemprosesan boleh digunakan pada github di bawah.
https://github.com/nachiket92/conv-social-pooling
(2) INTERAKSI
Data data ini dicipta oleh Makmal Kawalan Sistem Mekanikal (MSC Lab) di University of California, Berkeley, dengan rakan usaha sama dari Institut Teknologi Karlsruhe (KIT) dan Sekolah Kebangsaan Mines Paris (MINES ParisTech) . Set data antarabangsa, lawan, kolaboratif (INTERAKSI). Ia boleh menghasilkan semula sebilangan besar gelagat interaktif pengguna jalan raya (seperti kenderaan dan pejalan kaki) dengan tepat dalam pelbagai senario pemanduan di negara yang berbeza.
http://www.interaction-dataset.com/
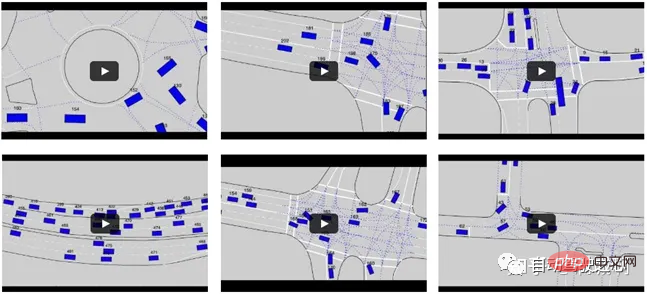
(3)apolloscape
Ini ialah set data pemanduan autonomi awam Apollo, yang mengandungi data yang disediakan untuk ramalan trajektori. Fail dalaman ialah jujukan data 1minit 2fps Struktur data termasuk ID nombor bingkai, ID sasaran, kategori sasaran, kedudukan xyz, panjang, lebar dan maklumat ketinggian, dan kategori sasaran termasuk kereta kecil, kereta besar, pejalan kaki , basikal/kenderaan elektrik dan lain-lain.
https://apolloscape.auto/trajectory.html
(4) TRAF
Set data ini memfokuskan pada keadaan trafik berketumpatan tinggi, yang boleh membantu algoritma memfokuskan dengan lebih baik pada menganalisis tingkah laku pemandu manusia dalam persekitaran yang tidak menentu. Setiap bingkai data mengandungi lebih kurang 13 kenderaan bermotor, 5 pejalan kaki dan 2 basikal
https://gamma.umd.edu/researchdirections/autonomousdriving/ad
Terdapat banyak projek ramalan trajektori menggunakan set data ini dalam pautan.
(5) nuScenes
Berita besar akan datang. Ia mengumpul 1,000 adegan pemanduan di Boston dan Singapura, dua bandar dengan trafik sesak dan keadaan pemanduan yang mencabar. Set datanya mempunyai kertas berkaitan, anda boleh lihat untuk mendapatkan pemahaman yang lebih baik tentang set data ini.
https://arxiv.org/abs/1903.11027
Terdapat pertandingan berkaitan ramalan dalam set data ini, anda boleh mengikutinya.
https://www.nuscenes.org/prediction?externalData=all&mapData=all&modalities=Any
6 Metrik Penilaian
Metrik penilaian yang paling banyak digunakan pada masa ini ialah metrik geometri.
Sukatan geometri mempunyai banyak penunjuk, yang utama digunakan ialah ADE, FDE, dan MR.
ADE ialah jarak Euclidean yang dinormalkan. FDE ialah jarak Euclidean antara titik ramalan akhir. MR ialah kadar rindu. Terdapat banyak nama yang berbeza Perkara utama ialah menetapkan ambang Jika jarak Euclidean antara mata yang diramalkan adalah lebih rendah daripada ramalan ini, ia akan direkodkan sebagai pukulan Jika ia lebih tinggi daripada ambang ini, ia akan direkodkan sebagai a miss Akhirnya, peratusan akan dikira.
Metrik geometri ialah penunjuk penting untuk mengukur persamaan antara trajektori yang diramalkan dan trajektori sebenar, dan boleh mewakili ketepatan dengan baik. Tetapi untuk tujuan ramalan trajektori, adalah tidak bermakna untuk menilai ketepatan sahaja. Perlu juga terdapat langkah-langkah kebarangkalian untuk menilai ketidakpastian, terutamanya untuk pengagihan output berbilang modal juga perlu ada langkah-langkah peringkat tugas, langkah-langkah keteguhan, dan penilaian kecekapan.
Ukuran kebarangkalian: Perbezaan KL, kebarangkalian yang diramalkan dan kebarangkalian terkumpul boleh digunakan sebagai ukuran kebarangkalian. Contohnya, NLL, NLL berasaskan KDE [17]. Metrik peringkat tugas: Nilaikan kesan ramalan trajektori pada peraturan bahagian belakang (piADE, piFDE) [18]. Keteguhan: Pertimbangkan panjang atau tempoh bahagian trajektori yang diperhatikan sebelum ramalan saiz data input kekerapan pensampelan dan kebisingan rangkaian saraf, overfitting dan analisis penggunaan input; input input, sama ada ia dijamin berfungsi secara normal dan faktor lain. Kecekapan: Pertimbangkan kuasa pengkomputeran.
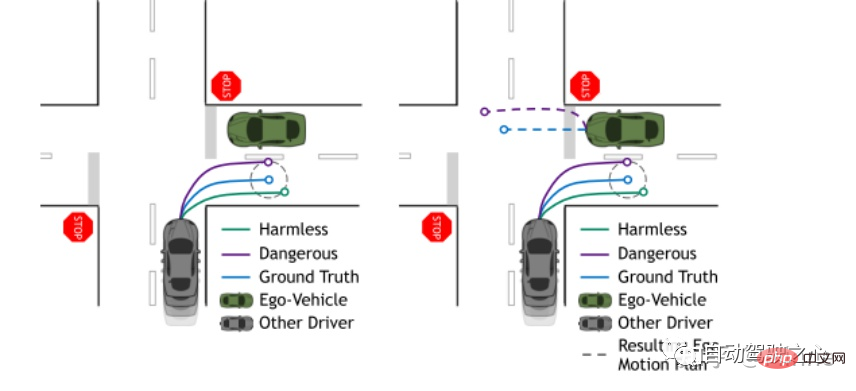
Seperti yang ditunjukkan dalam rajah di bawah, pertimbangan utama kertas ini ialah berdasarkan nilai sebenar (biru), trajektori ungu dan hijau yang diramalkan oleh kereta sasaran kelabu mempunyai ADE dan FDE yang sama, tetapi berbeza Kaedah ramalan akan memberi kesan kepada perancangan kereta sendiri, dan pada masa ini tiada metrik sedemikian untuk menilai tahap tugas, jadi mereka mencadangkan piADE dan piFDE untuk melakukan ini.
7 Tiga soalan
Soalan 1: Tiga kaedah ramalan trajektori yang berbeza : Di manakah senario aplikasi berasaskan model fizikal, berasaskan pembelajaran, dan berasaskan perancangan Apakah kelebihan dan kekurangannya?
Kaedah pemodelan yang berbeza boleh menggabungkan dan mengeksploitasi pelbagai jenis maklumat kontekstual. Semua kaedah pemodelan boleh dikembangkan dengan menggunakan petunjuk kontekstual sasaran dan persekitaran dinamik dan statik. Walau bagaimanapun, kaedah pemodelan yang berbeza mempamerkan tahap kerumitan dan kecekapan yang berbeza dalam menggabungkan kategori maklumat semantik yang berbeza.
1. Kaedah berasaskan model fizikal
Senario yang boleh digunakan: sasaran, persekitaran statik dan simulasi dinamik boleh Pemodelan persamaan pemindahan eksplisit.
Kelebihan:
- Kaedah berasaskan model fizikal boleh digunakan dengan mudah merentas persekitaran dengan memilih persamaan pemindahan yang sesuai, manakala Tiada data latihan diperlukan, walaupun beberapa data untuk anggaran parameter berguna. Dalam kertas kerja, model CV ringkas juga menghasilkan hasil yang munasabah.
- Kaedah berasaskan model fizikal boleh diperluaskan dengan mudah dengan menggabungkan isyarat ejen sasaran.
Kelemahan:
- Pendekatan kepada pemodelan eksplisit ini mungkin tidak menangkap kerumitan dunia sebenar dengan baik .
- Persamaan pemindahan kekurangan maklumat global dalam ruang dan masa, menyebabkan kemungkinan mendapatkan penyelesaian optimum tempatan.
Kekurangan tersebut mengehadkan penggunaan kaedah fizikal kepada ramalan jangka pendek atau persekitaran tanpa halangan.
2. Kaedah berasaskan pembelajaran
Senario yang boleh digunakan: Sesuai untuk persekitaran semasa dengan maklumat yang tidak diketahui yang kompleks (seperti Kawasan biasa dengan semantik kaya), dan maklumat ini boleh digunakan untuk julat ramalan yang agak besar.
Kelebihan:
- Kaedah berasaskan pembelajaran berpotensi mengendalikan semua jenis maklumat kontekstual yang dikodkan dalam set data yang dikumpul. Sebahagian daripadanya adalah berasaskan peta, dan yang lain boleh digunakan untuk melanjutkan maklumat kontekstual.
Kelemahan:
- Perlu mengumpul data yang mencukupi di lokasi tertentu untuk latihan.
- Peluasan maklumat kontekstual mungkin membawa kepada isu pembelajaran, kecekapan data dan generalisasi yang terlibat.
- cenderung digunakan dalam komponen kritikal bukan keselamatan Dalam ADAS, kebolehtafsiran adalah lebih penting, yang tidak boleh dicapai dengan kaedah berasaskan pembelajaran.
3. Kaedah berasaskan perancangan
Senario yang boleh digunakan: Titik akhir ditentukan dan persekitaran peta ialah Adegan yang tersedia, diwakili dengan baik.
Kelebihan:
- Jika dua syarat di atas dipenuhi, ia boleh mencapai ketepatan yang lebih baik daripada kaedah fizikal dan lebih baik daripada pembelajaran- kaedah berasaskan Kaedah mempunyai keupayaan generalisasi yang lebih baik.
Kelemahan:
- Algoritma perancangan tradisional: Dijkstra, Kaedah Kawad Pantas, perancang gerakan berasaskan pensampelan optimum akan berkembang dengan pesat apabila bilangan sasaran, saiz persekitaran dan julat ramalan meningkat.
- Berbanding dengan model berasaskan fizik ringkas, parameter kaedah perancangan berasaskan isyarat konteks (seperti fungsi ganjaran untuk pengaturcaraan songsang dan model untuk pengaturcaraan hadapan) adalah remeh dan secara amnya lebih mudah untuk learn , tetapi dari segi penaakulan, ia adalah kurang cekap untuk keadaan ejen dimensi tinggi (sasaran).
Kaedah berasaskan perancangan pada asasnya sedar peta dan sedar halangan, dan secara semula jadi meluas menggunakan petunjuk semantik. Biasanya, mereka mengekodkan kerumitan situasi ke dalam persamaan matlamat/ganjaran, tetapi ini mungkin tidak menyepadukan input talian dinamik dengan betul. Oleh itu, pengarang perlu mereka bentuk pengubahsuaian khusus untuk memasukkan input dinamik ke dalam algoritma ramalan (Jump Markov Processes, penyesuaian tempatan trajektori yang diramalkan, teori permainan). Tidak seperti kaedah berasaskan pembelajaran, input sasaran boleh digabungkan dengan mudah kerana kedua-dua proses perancangan ke hadapan dan ke belakang adalah berdasarkan model dinamik sasaran yang sama.
Soalan 2: Adakah masalah ramalan trajektori telah diselesaikan sekarang?
Keperluan untuk ramalan trajektori sebahagian besarnya bergantung pada domain aplikasi dan senario kes penggunaan khusus di dalamnya. Mungkin tidak boleh dikatakan bahawa masalah ramalan trajektori telah diselesaikan dalam jangka pendek. Ambil industri automotif sebagai contoh Oleh kerana terdapat piawaian dan peraturan khas yang menentukan kelajuan maksimum, peraturan lalu lintas, pengedaran kelajuan dan pecutan pejalan kaki, dan spesifikasi untuk kadar pecutan/penyusutan kenderaan yang selesa, ia nampaknya paling berkuasa dalam merumuskan. keperluan dan mencadangkan penyelesaian. Boleh dikatakan bahawa untuk fungsi AEB kereta pintar, penyelesaian itu telah mencapai tahap prestasi yang membolehkan pengeluaran industri produk pengguna, dan kes penggunaannya yang diperlukan telah diselesaikan. Bagi kes penggunaan lain, lebih banyak standardisasi dan artikulasi keperluan yang jelas akan diperlukan dalam masa terdekat. Dan masih ada keperluan untuk berkembang untuk kekukuhan dan kestabilan.
Jadi sebelum menjawab sama ada ramalan trajektori telah menyelesaikan masalah ini, sekurang-kurangnya piawaian harus ditetapkan.
Pada masa ini dalam bidang robotik
- Kaedah berdasarkan model fizikal dan pembelajaran boleh dihasilkan dalam masa yang singkat (1- 2s) Ketepatan yang lebih tinggi. Ia sangat sesuai untuk perancangan gerakan tempatan dan mengelakkan perlanggaran orang ramai. Model CV yang paling ringkas mempunyai kesan yang baik pada perancangan tempatan robot. Jika anda menganggap interaksi antara pejalan kaki dan kesan kehadiran robot pada pergerakan pejalan kaki, terdapat banyak algoritma lanjutan.
- Terdapat cabaran hebat untuk perancangan laluan global yang memerlukan ramalan selama 15-20 saat. Keperluan boleh dilonggarkan dengan sewajarnya, dan menjadi sangat penting untuk memahami input konteks dinamik dan statik (yang mempengaruhi operasi dalam jangka panjang, penaakulan pada peta persekitaran dan inferens niat sasaran). Untuk perancangan laluan tempatan dan global, kaedah bebas kedudukan paling sesuai untuk meramalkan pergerakan dalam pelbagai persekitaran.
- Robot semasa meramalkan bahawa ADE dalam 4.8s ialah 0.19-0.4m. Model halaju mudah juga boleh mencapai ADE 0.53m. 9s meramalkan ADE 1.4-2m.
Pada masa ini untuk bidang pemanduan autonomi:
- Kebanyakan kerja mempertimbangkan pejalan kaki yang melintas jalan. teruskan berjalan, berhenti berjalan.
- Basikal: Seorang penunggang basikal menghampiri persimpangan dengan sehingga lima arah jalan berbeza di belakangnya.
Soalan 3: Adakah teknik penilaian semasa untuk mengukur prestasi ramalan trajektori cukup baik?
Pada masa ini terdapat kekurangan pendekatan sistematik untuk algoritma ramalan, terutamanya untuk kaedah ramalan trajektori yang mempertimbangkan input kontekstual dan meramalkan bilangan sasaran yang sewenang-wenangnya.
Kini kebanyakan pengarang hanya menggunakan metrik geometri (AED, FDE) sebagai penunjuk untuk mengukur kualiti algoritma. Walau bagaimanapun, untuk ramalan jangka panjang, ramalan selalunya berbilang mod dan dikaitkan dengan ketidakpastian, dan penilaian prestasi kaedah sedemikian harus menggunakan metrik yang mengambil kira perkara ini, seperti kemungkinan log negatif atau logaritma yang diperoleh daripada kerugian KLD.
Terdapat juga keperluan untuk langkah-langkah kebarangkalian yang lebih mencerminkan rawak pergerakan manusia dan ketidakpastian yang terlibat dalam ketidaksempurnaan persepsi.
Terdapat juga penilaian kekukuhan, yang perlu mempertimbangkan kestabilan sistem apabila ralat pengesanan, kecacatan penjejakan, ketidakpastian kedudukan diri atau perubahan peta berlaku pada bahagian penderiaan.
Pada masa yang sama, walaupun set data yang digunakan pada masa ini mengandungi senario yang sangat komprehensif, set data ini biasanya diberi anotasi separa automatik dan oleh itu hanya boleh memberikan anggaran kebenaran asas yang tidak lengkap dan bising. Tambahan pula, panjang trajektori selalunya tidak mencukupi di sesetengah kawasan aplikasi yang memerlukan ramalan jangka panjang. Akhir sekali, interaksi antara sasaran dalam set data biasanya terhad Contohnya, dalam persekitaran yang jarang, sukar untuk sasaran mempengaruhi satu sama lain.
Untuk meringkaskan: Untuk menilai kualiti ramalan, penyelidik harus memilih set data yang lebih kompleks (termasuk halangan bukan cembung, trajektori panjang dan interaksi kompleks) dan metrik lengkap (geometrik + kebarangkalian ). Kaedah yang lebih baik ialah menetapkan keperluan ketepatan yang berbeza berdasarkan masa ramalan yang berbeza, tempoh pemerhatian yang berbeza dan kerumitan pemandangan yang berbeza. Dan perlu ada penilaian kekukuhan dan penilaian masa nyata. Di samping itu, perlu ada penunjuk yang relevan yang boleh mengukur kesan sistem ADAS pada bahagian belakang [18] dan penunjuk yang mengukur kepekaan terhadap senario berbahaya [1].
8 Hala Tuju Masa Depan
Daripada perbincangan dalam [2], dipetik di sini.
Trend semasa ialah menggunakan kaedah yang lebih kompleks untuk mengatasi kaedah menggunakan model tunggal + KF
Arah:
- Gunakan maklumat kontekstual yang dipertingkatkan: maklumat semantik yang lebih mendalam boleh digunakan, yang sepatutnya membawa kepada pemahaman yang lebih baik tentang persekitaran statik. Dan penggunaan semasa ciri semantik untuk ramalan trajektori masih perlu dibangunkan
- Berkenaan senario yang menyedari sosial: ① Kebanyakan kaedah semasa menganggap bahawa tingkah laku semua orang yang diperhatikan adalah serupa, pergerakan mereka boleh diramalkan oleh model yang sama dan ciri-ciri yang sama, manakala penangkapan dan penaakulan atribut sosial peringkat tinggi masih di peringkat awal pembangunan. ② Kebanyakan kaedah yang boleh dilaksanakan adalah berdasarkan andaian bahawa tingkah laku kerjasama antara orang, dan orang sebenar mungkin lebih cenderung untuk mengoptimumkan matlamat individu berbanding strategi bersama, jadi kaedah menggabungkan teori permainan AI + tradisional adalah sangat menjanjikan.
- Untuk ramalan jangka panjang, maklumat kontekstual menjadi sangat penting kerana niat dipertimbangkan berdasarkan konteks dan keadaan sekeliling. Banyak kaedah berasaskan pembelajaran semasa memperlakukan individu sebagai zarah dan menggunakannya untuk belajar memindahkan maklumat bagi menentukan arah pergerakan masa hadapan. Memperluas model ini dengan lebih banyak ramalan didorong niat, serupa dengan tingkah laku terarah matlamat manusia, akan memberi manfaat kepada ramalan jangka panjang.
- Kebanyakan kaedah berasaskan perancangan bergantung pada set objektif tertentu, yang menjadikannya tidak boleh digunakan atau tidak sesuai tanpa pengetahuan awal tentang destinasi atau di mana bilangan destinasi yang mungkin terlalu tinggi tepat. Ini menjadikan inferens automatik titik akhir destinasi berdasarkan maklumat semantik penting. Atau ia boleh mengenal pasti destinasi yang mungkin dalam persekitaran secara dinamik dan melakukan ramalan trajektori berdasarkan ini. Ini membolehkan kaedah berasaskan perancangan digunakan dalam persekitaran yang tidak diketahui.
- Kaedah semasa memberi tumpuan kepada menyelesaikan jenis tugasan tertentu, seperti apabila terdapat corak gerakan yang jelas dalam persekitaran, atau apabila struktur ruang persekitaran dan destinasi ejen sasaran Apabila diketahui lebih awal. Kaedah ramalan trajektori perlu dapat menyesuaikan diri dengan persekitaran yang tidak ditentukan/berubah dan mengendalikan situasi yang tidak dijangka. Ini memerlukan pembelajaran pemindahan dan beberapa kaedah untuk menghadapi persekitaran baharu, di mana pembelajaran dan penaakulan tentang peraturan asas yang tidak berubah, atau tingkah laku umum pejalan kaki atau mengelakkan perlanggaran adalah tidak sesuai. Penyesuaian domain boleh digunakan untuk mempelajari model generalisasi.
- Satu lagi arah yang perlu diberi perhatian: keteguhan dan kebolehintegrasian.
Ringkasnya: Ringkasnya, maklumat konteks harus digunakan dengan lebih mendalam, adalah lebih baik untuk mempunyai model tingkah laku dan teori permainan yang berbeza untuk sasaran yang berbeza, dan membuat lebih banyak keputusan berdasarkan lebih banyak maklumat Ramalan niat yang sangat baik, inferens automatik titik akhir, masalah generalisasi kepada persekitaran baharu, keteguhan dan kebolehintegrasian.
Atas ialah kandungan terperinci Bincangkan status semasa dan trend perkembangan teknologi ramalan trajektori pemanduan autonomi. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

AI Hentai Generator
Menjana ai hentai secara percuma.

Artikel Panas
Alat panas

Notepad++7.3.1
Editor kod yang mudah digunakan dan percuma

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

Hantar Studio 13.0.1
Persekitaran pembangunan bersepadu PHP yang berkuasa

Dreamweaver CS6
Alat pembangunan web visual

SublimeText3 versi Mac
Perisian penyuntingan kod peringkat Tuhan (SublimeText3)
Topik panas
 1377
1377
 52
52

 Pendaraban matriks universal CUDA: dari kemasukan kepada kemahiran!
Mar 25, 2024 pm 12:30 PM
Pendaraban matriks universal CUDA: dari kemasukan kepada kemahiran!
Mar 25, 2024 pm 12:30 PM
Pendaraban Matriks Umum (GEMM) ialah bahagian penting dalam banyak aplikasi dan algoritma, dan juga merupakan salah satu petunjuk penting untuk menilai prestasi perkakasan komputer. Penyelidikan mendalam dan pengoptimuman pelaksanaan GEMM boleh membantu kami lebih memahami pengkomputeran berprestasi tinggi dan hubungan antara perisian dan sistem perkakasan. Dalam sains komputer, pengoptimuman GEMM yang berkesan boleh meningkatkan kelajuan pengkomputeran dan menjimatkan sumber, yang penting untuk meningkatkan prestasi keseluruhan sistem komputer. Pemahaman yang mendalam tentang prinsip kerja dan kaedah pengoptimuman GEMM akan membantu kami menggunakan potensi perkakasan pengkomputeran moden dengan lebih baik dan menyediakan penyelesaian yang lebih cekap untuk pelbagai tugas pengkomputeran yang kompleks. Dengan mengoptimumkan prestasi GEMM
 Sistem pemanduan pintar Qiankun ADS3.0 Huawei akan dilancarkan pada bulan Ogos dan akan dilancarkan pada Xiangjie S9 buat kali pertama
Jul 30, 2024 pm 02:17 PM
Sistem pemanduan pintar Qiankun ADS3.0 Huawei akan dilancarkan pada bulan Ogos dan akan dilancarkan pada Xiangjie S9 buat kali pertama
Jul 30, 2024 pm 02:17 PM
Pada 29 Julai, pada majlis pelepasan kereta baharu AITO Wenjie yang ke-400,000, Yu Chengdong, Pengarah Urusan Huawei, Pengerusi Terminal BG, dan Pengerusi Smart Car Solutions BU, menghadiri dan menyampaikan ucapan dan mengumumkan bahawa model siri Wenjie akan akan dilancarkan tahun ini Pada bulan Ogos, Huawei Qiankun ADS 3.0 versi telah dilancarkan, dan ia dirancang untuk terus naik taraf dari Ogos hingga September. Xiangjie S9, yang akan dikeluarkan pada 6 Ogos, akan memperkenalkan sistem pemanduan pintar ADS3.0 Huawei. Dengan bantuan lidar, versi Huawei Qiankun ADS3.0 akan meningkatkan keupayaan pemanduan pintarnya, mempunyai keupayaan bersepadu hujung-ke-hujung, dan mengguna pakai seni bina hujung ke hujung baharu GOD (pengenalpastian halangan am)/PDP (ramalan). membuat keputusan dan kawalan), menyediakan fungsi NCA pemanduan pintar dari ruang letak kereta ke ruang letak kereta, dan menaik taraf CAS3.0
 Bagaimana untuk menyelesaikan masalah ekor panjang dalam senario pemanduan autonomi?
Jun 02, 2024 pm 02:44 PM
Bagaimana untuk menyelesaikan masalah ekor panjang dalam senario pemanduan autonomi?
Jun 02, 2024 pm 02:44 PM
Semalam semasa temu bual, saya telah ditanya sama ada saya telah membuat sebarang soalan berkaitan ekor panjang, jadi saya fikir saya akan memberikan ringkasan ringkas. Masalah ekor panjang pemanduan autonomi merujuk kepada kes tepi dalam kenderaan autonomi, iaitu, kemungkinan senario dengan kebarangkalian yang rendah untuk berlaku. Masalah ekor panjang yang dirasakan adalah salah satu sebab utama yang kini mengehadkan domain reka bentuk pengendalian kenderaan autonomi pintar satu kenderaan. Seni bina asas dan kebanyakan isu teknikal pemanduan autonomi telah diselesaikan, dan baki 5% masalah ekor panjang secara beransur-ansur menjadi kunci untuk menyekat pembangunan pemanduan autonomi. Masalah ini termasuk pelbagai senario yang berpecah-belah, situasi yang melampau dan tingkah laku manusia yang tidak dapat diramalkan. "Ekor panjang" senario tepi dalam pemanduan autonomi merujuk kepada kes tepi dalam kenderaan autonomi (AVs) kes Edge adalah senario yang mungkin dengan kebarangkalian yang rendah untuk berlaku. kejadian yang jarang berlaku ini
 Artikel ini sudah cukup untuk anda membaca tentang pemanduan autonomi dan ramalan trajektori!
Feb 28, 2024 pm 07:20 PM
Artikel ini sudah cukup untuk anda membaca tentang pemanduan autonomi dan ramalan trajektori!
Feb 28, 2024 pm 07:20 PM
Ramalan trajektori memainkan peranan penting dalam pemanduan autonomi Ramalan trajektori pemanduan autonomi merujuk kepada meramalkan trajektori pemanduan masa hadapan kenderaan dengan menganalisis pelbagai data semasa proses pemanduan kenderaan. Sebagai modul teras pemanduan autonomi, kualiti ramalan trajektori adalah penting untuk kawalan perancangan hiliran. Tugas ramalan trajektori mempunyai timbunan teknologi yang kaya dan memerlukan kebiasaan dengan persepsi dinamik/statik pemanduan autonomi, peta ketepatan tinggi, garisan lorong, kemahiran seni bina rangkaian saraf (CNN&GNN&Transformer), dll. Sangat sukar untuk bermula! Ramai peminat berharap untuk memulakan ramalan trajektori secepat mungkin dan mengelakkan perangkap Hari ini saya akan mengambil kira beberapa masalah biasa dan kaedah pembelajaran pengenalan untuk ramalan trajektori! Pengetahuan berkaitan pengenalan 1. Adakah kertas pratonton teratur? A: Tengok survey dulu, hlm
 SIMPL: Penanda aras ramalan gerakan berbilang ejen yang mudah dan cekap untuk pemanduan autonomi
Feb 20, 2024 am 11:48 AM
SIMPL: Penanda aras ramalan gerakan berbilang ejen yang mudah dan cekap untuk pemanduan autonomi
Feb 20, 2024 am 11:48 AM
Tajuk asal: SIMPL: ASimpleandEfficientMulti-agentMotionPredictionBaselineforAutonomousDriving Paper pautan: https://arxiv.org/pdf/2402.02519.pdf Pautan kod: https://github.com/HKUST-Aerial-Robotics/SIMPL Unit pengarang: Universiti Sains Hong Kong dan Teknologi Idea Kertas DJI: Kertas kerja ini mencadangkan garis dasar ramalan pergerakan (SIMPL) yang mudah dan cekap untuk kenderaan autonomi. Berbanding dengan agen-sen tradisional
 SOTA terbaharu nuScenes |. SparseAD: Pertanyaan jarang membantu pemanduan autonomi hujung ke hujung yang cekap!
Apr 17, 2024 pm 06:22 PM
SOTA terbaharu nuScenes |. SparseAD: Pertanyaan jarang membantu pemanduan autonomi hujung ke hujung yang cekap!
Apr 17, 2024 pm 06:22 PM
Ditulis di hadapan & titik permulaan Paradigma hujung ke hujung menggunakan rangka kerja bersatu untuk mencapai pelbagai tugas dalam sistem pemanduan autonomi. Walaupun kesederhanaan dan kejelasan paradigma ini, prestasi kaedah pemanduan autonomi hujung ke hujung pada subtugas masih jauh ketinggalan berbanding kaedah tugasan tunggal. Pada masa yang sama, ciri pandangan mata burung (BEV) padat yang digunakan secara meluas dalam kaedah hujung ke hujung sebelum ini menyukarkan untuk membuat skala kepada lebih banyak modaliti atau tugasan. Paradigma pemanduan autonomi hujung ke hujung (SparseAD) tertumpu carian jarang dicadangkan di sini, di mana carian jarang mewakili sepenuhnya keseluruhan senario pemanduan, termasuk ruang, masa dan tugas, tanpa sebarang perwakilan BEV yang padat. Khususnya, seni bina jarang bersatu direka bentuk untuk kesedaran tugas termasuk pengesanan, penjejakan dan pemetaan dalam talian. Di samping itu, berat
 Mari kita bincangkan tentang sistem pemanduan autonomi hujung ke hujung dan generasi seterusnya, serta beberapa salah faham tentang pemanduan autonomi hujung ke hujung?
Apr 15, 2024 pm 04:13 PM
Mari kita bincangkan tentang sistem pemanduan autonomi hujung ke hujung dan generasi seterusnya, serta beberapa salah faham tentang pemanduan autonomi hujung ke hujung?
Apr 15, 2024 pm 04:13 PM
Pada bulan lalu, atas sebab-sebab yang diketahui umum, saya telah mengadakan pertukaran yang sangat intensif dengan pelbagai guru dan rakan sekelas dalam industri. Topik yang tidak dapat dielakkan dalam pertukaran secara semula jadi adalah hujung ke hujung dan Tesla FSDV12 yang popular. Saya ingin mengambil kesempatan ini untuk menyelesaikan beberapa buah fikiran dan pendapat saya pada masa ini untuk rujukan dan perbincangan anda. Bagaimana untuk mentakrifkan sistem pemanduan autonomi hujung ke hujung, dan apakah masalah yang sepatutnya dijangka diselesaikan hujung ke hujung? Menurut definisi yang paling tradisional, sistem hujung ke hujung merujuk kepada sistem yang memasukkan maklumat mentah daripada penderia dan secara langsung mengeluarkan pembolehubah yang membimbangkan tugas. Sebagai contoh, dalam pengecaman imej, CNN boleh dipanggil hujung-ke-hujung berbanding kaedah pengekstrak ciri + pengelas tradisional. Dalam tugas pemanduan autonomi, masukkan data daripada pelbagai penderia (kamera/LiDAR
 Versi sistem Apple 16 manakah yang terbaik?
Mar 08, 2024 pm 05:16 PM
Versi sistem Apple 16 manakah yang terbaik?
Mar 08, 2024 pm 05:16 PM
Versi terbaik sistem Apple 16 ialah iOS16.1.4 Versi terbaik sistem iOS16 mungkin berbeza dari orang ke orang Penambahan dan peningkatan dalam pengalaman penggunaan harian juga telah dipuji oleh ramai pengguna. Versi sistem Apple 16 yang manakah adalah yang terbaik Jawapan: iOS16.1.4 Versi terbaik sistem iOS 16 mungkin berbeza dari orang ke orang. Menurut maklumat awam, iOS16, yang dilancarkan pada 2022, dianggap sebagai versi yang sangat stabil dan berprestasi, dan pengguna cukup berpuas hati dengan pengalaman keseluruhannya. Selain itu, penambahan ciri baharu dan penambahbaikan dalam pengalaman penggunaan harian dalam iOS16 juga telah diterima baik oleh ramai pengguna. Terutamanya dari segi hayat bateri yang dikemas kini, prestasi isyarat dan kawalan pemanasan, maklum balas pengguna agak positif. Walau bagaimanapun, memandangkan iPhone14
