

Trend pembuatan penting: Robot pintar memerlukan empat keupayaan

Robot pintar ialah wakil tipikal produk pintar. Robot pintar mesti mempunyai sekurang-kurangnya tiga elemen berikut: pertama, elemen penderiaan, digunakan untuk memahami keadaan persekitaran sekeliling kedua, elemen pergerakan, untuk membuat tindakan reaktif kepada dunia luar, elemen pemikiran, berdasarkan; maklumat yang diperoleh daripada elemen penderiaan, fikir dan pakai Apakah jenis tindakan.
Orang ramai biasanya membahagikan robot kepada tiga generasi. Generasi pertama ialah robot boleh atur cara Robot jenis ini secara amnya boleh menyelesaikan beberapa operasi berulang yang mudah mengikut program yang diprogramkan oleh pengendali. Generasi robot ini telah digunakan sejak separuh kedua tahun 1960-an dan kini digunakan secara meluas dalam industri.
Generasi kedua ialah robot persepsi, juga dipanggil robot penyesuaian Ia dibangunkan berdasarkan robot generasi pertama dan mempunyai pelbagai tahap keupayaan untuk melihat persekitaran sekeliling.
Robot generasi ketiga mempunyai mekanisme pintar seperti pengecaman, penaakulan, perancangan dan pembelajaran Ia boleh menggabungkan persepsi dan tindakan secara bijak, jadi ia boleh beroperasi dalam persekitaran yang tidak khusus dan dipanggil robot pintar.
Perbezaan asas antara robot pintar dan robot industri ialah robot pintar mempunyai fungsi persepsi, pengenalan, pertimbangan dan perancangan Oleh itu, kecerdasan mesin boleh dibahagikan kepada dua tahap , mengenal pasti, memahami dan menilai Fungsi, yang kedua ialah fungsi meringkaskan pengalaman dan pembelajaran.
Disebabkan penggunaan yang berbeza, robot pintar mempunyai struktur dan fungsi sistem yang berbeza Di sini kami hanya memperkenalkan struktur asas dan ciri pintar robot untuk aplikasi industri. Rajah 2.3 ialah struktur asas robot pintar.
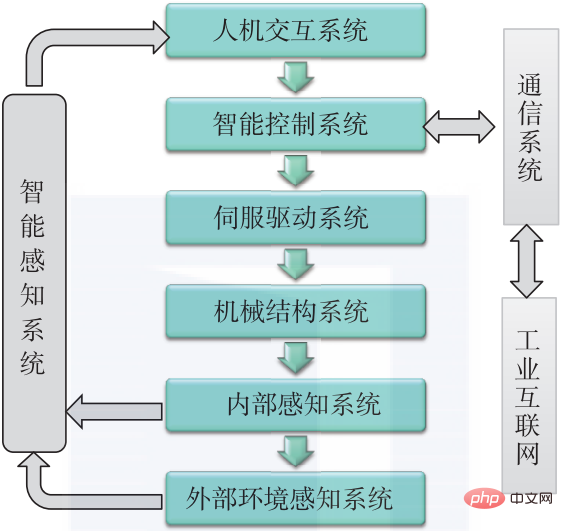
▲ Rajah 2.3 Komposisi asas robot pintar
1 Keupayaan persepsi persekitaran
Ciri pintar yang paling ketara bagi robot pintar ialah luaran. dan Persepsi dalaman.
Keupayaan persepsi persekitaran luaran direalisasikan oleh sistem persepsi luaran, yang menggunakan satu siri penderia luaran (termasuk penglihatan, pendengaran, sentuhan, kedekatan, daya, inframerah, ultrasound dan laser, dll.) untuk memproses penderiaan maklumat. Penderia ini termasuk penderia perlanggaran, penderia inframerah jauh, penderia fotosensitif, mikrofon, pengekod fotoelektrik, penderia piroelektrik, penderia ultrasonik, penderia inframerah julat berterusan, kompas digital, penderia suhu, dsb.
Sistem persepsi dalaman terdiri daripada satu siri penderia yang digunakan untuk mengesan status robot itu sendiri Ia boleh memantau kedudukan, kelajuan, pecutan, tekanan dan trajektori setiap koordinat setiap bahagian robot yang bergerak. dalam masa nyata, dan pantau tekanan setiap komponen Daya, imbangan, suhu, dsb.
Sistem persepsi pintar terdiri daripada maklumat yang diperoleh daripada sistem persepsi persekitaran luaran dan sistem persepsi dalaman. Terdapat lebih banyak jenis dan bilangan penderia yang digunakan dalam sistem ini Setiap penderia mempunyai keadaan penggunaan dan julat penderiaan tertentu, dan boleh memberikan maklumat tentang sebahagian atau keseluruhan bahagian persekitaran atau objek untuk menggunakan maklumat penderia ini dengan berkesan. adalah perlu untuk menggunakan beberapa bentuk sintesis atau pemprosesan gabungan maklumat penderia Sistem pemprosesan pelbagai bentuk untuk jenis maklumat yang berbeza ialah gabungan sensor.
Teknologi gabungan sensor melibatkan teori dan kaedah baharu dalam bidang maklumat, pengesanan dan kawalan seperti rangkaian saraf, kejuruteraan pengetahuan dan teori kabur.
2. Keupayaan kawalan
Keupayaan kawalan sistem robot pintar direalisasikan oleh sistem kawalan pintar ini adalah untuk mengawal sistem mengikut program arahan operasi robot isyarat yang disalurkan daripada penderia dalaman dan luaran Pangkalan pengetahuan dan sistem pakar mengenal pasti dan menggunakan analisis algoritma dan membuat keputusan yang berbeza, dan kemudian mengeluarkan arahan kawalan untuk mengawal robot untuk melengkapkan pergerakan dan fungsi yang ditentukan.
Jika robot tidak mempunyai ciri maklum balas maklumat, sistem kawalan robot ialah sistem kawalan gelung terbuka, dan sebaliknya ialah sistem kawalan gelung tertutup. Mengikut prinsip kawalan, sistem kawalan boleh dibahagikan kepada sistem kawalan program, sistem kawalan adaptif dan sistem kawalan kecerdasan buatan Mengikut bentuk pergerakan kawalan, sistem kawalan boleh dibahagikan kepada sistem kawalan titik dan sistem kawalan trajektori berterusan.
Cara menganalisis dan memproses maklumat ini dan membuat keputusan kawalan yang betul memerlukan sokongan sistem pakar. Sistem pakar mentafsir data yang dikumpul daripada penderia, memperoleh perihalan keadaan robot, menyimpul dan meramalkan hasil yang mungkin daripada keadaan yang diberikan, dan mendiagnosis kemungkinan kerosakan sistem melalui penilaian keadaan operasi.
Mengikut matlamat dan kekangan reka bentuk sistem, merancang dan mereka bentuk satu siri tindakan, memantau perbezaan antara keputusan dan rancangan, dan mencadangkan kaedah untuk mengekalkan operasi sistem yang betul. Sistem kecerdasan buatan digabungkan dengan kaedah kawalan tradisional untuk membentuk keseluruhan proses kawalan gelung tertutup, yang memerlukan sokongan sejumlah besar pengetahuan, peraturan, algoritma, pengecaman corak dan teknologi lain.
3. Keupayaan pembelajaran
Memandangkan keperluan untuk robot pintar terus meningkat, persekitaran yang dihadapi oleh robot selalunya tidak dapat diramalkan, dan persekitaran tidak berstruktur telah menjadi arus perdana. Dalam persekitaran yang dinamik dan kompleks, jika robot ingin menyelesaikan tugas yang kompleks, keupayaan pembelajarannya amat penting.
Dalam kes ini, robot harus terus menyesuaikan dirinya melalui pembelajaran mengikut persekitaran luaran dan tugas yang dihadapinya, mengekstrak maklumat berguna dalam proses berinteraksi dengan persekitaran, dan secara beransur-ansur memahami dan menyesuaikan diri dengan persekitaran. Melalui pembelajaran, tahap kecerdasan robot boleh dipertingkatkan secara berterusan, membolehkannya menghadapi beberapa situasi yang tidak dijangka, dengan itu menebus kemungkinan kekurangan yang disebabkan oleh pereka semasa proses reka bentuk.
Oleh itu, kebolehan belajar adalah salah satu kebolehan penting yang perlu dimiliki oleh robot Ia memberikan jaminan yang berkesan untuk robot dalam persekitaran yang kompleks dan boleh diubah dari segi pemahaman alam sekitar, perancangan dan membuat keputusan, sekali gus meningkatkan operasi bagi. keseluruhan sistem robot.
4. Keupayaan untuk mengakses Internet Industri
Robot pintar, seperti semua produk pintar, akan menjadi terminal Internet Industri pada masa hadapan, jadi robot pintar mesti mempunyai keupayaan untuk mengakses Internet Industri.
Menggunakan prinsip sistem gabungan siber-fizikal (CPS) untuk membina modul komunikasi, yang disepadukan dengan sistem kawalan pintar secara dalaman untuk mengumpul semua status operasi robot secara luaran, ia disambungkan ke Internet melalui bas medan standard dan kad Ethernet untuk merealisasikan robot Penyepaduan antara robot dan sistem logistik dan sistem aplikasi lain merealisasikan integrasi antara dunia fizikal dan dunia maklumat.
Sistem IoT pintar memecahkan sempadan antara dunia fizikal tradisional dan sistem maklumat, menukar data menjadi maklumat yang tepat pada masanya dan berguna, membolehkan pengguna menikmati sepenuhnya pelbagai sumber dalam dunia maya dan nyata.
Artikel ini dipetik daripada "Smart Manufacturing: How AI Implements Manufacturing" (ISBN: 978-7-111-69931-6), dan diterbitkan dengan kebenaran penerbit.
Atas ialah kandungan terperinci Trend pembuatan penting: Robot pintar memerlukan empat keupayaan. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

Video Face Swap
Tukar muka dalam mana-mana video dengan mudah menggunakan alat tukar muka AI percuma kami!

Artikel Panas
Alat panas

Notepad++7.3.1
Editor kod yang mudah digunakan dan percuma

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

Hantar Studio 13.0.1
Persekitaran pembangunan bersepadu PHP yang berkuasa

Dreamweaver CS6
Alat pembangunan web visual

SublimeText3 versi Mac
Perisian penyuntingan kod peringkat Tuhan (SublimeText3)
Topik panas
 1393
1393
 52
1207
24
52
1207
24

 Platform Perdagangan Web3 Ranking_Web3 Global Exchanges Top Ten Ringkasan
Apr 21, 2025 am 10:45 AM
Platform Perdagangan Web3 Ranking_Web3 Global Exchanges Top Ten Ringkasan
Apr 21, 2025 am 10:45 AM
Binance adalah tuan rumah ekosistem perdagangan aset digital global, dan ciri -cirinya termasuk: 1. Jumlah dagangan harian purata melebihi $ 150 bilion, menyokong 500 pasangan perdagangan, yang meliputi 98% mata wang arus perdana; 2. Matriks inovasi meliputi pasaran Derivatif, susun atur Web3 dan sistem pendidikan; 3. Kelebihan teknikal adalah enjin yang sepadan dengan milisaat, dengan jumlah pemprosesan puncak sebanyak 1.4 juta transaksi sesaat; 4. Kemajuan pematuhan memegang lesen 15 negara dan menetapkan entiti yang mematuhi di Eropah dan Amerika Syarikat.
 Ramalan Harga Worldcoin (WLD) 2025-2031: Adakah WLD akan mencapai $ 4 menjelang 2031?
Apr 21, 2025 pm 02:42 PM
Ramalan Harga Worldcoin (WLD) 2025-2031: Adakah WLD akan mencapai $ 4 menjelang 2031?
Apr 21, 2025 pm 02:42 PM
Worldcoin (WLD) menonjol dalam pasaran cryptocurrency dengan mekanisme pengesahan biometrik dan perlindungan privasi yang unik, menarik perhatian banyak pelabur. WLD telah melakukan yang luar biasa di kalangan altcoin dengan teknologi inovatifnya, terutamanya dalam kombinasi dengan teknologi kecerdasan buatan terbuka. Tetapi bagaimanakah aset digital akan berkelakuan dalam beberapa tahun akan datang? Mari kita meramalkan harga masa depan WLD bersama -sama. Ramalan harga WLD 2025 dijangka mencapai pertumbuhan yang signifikan di WLD pada tahun 2025. Analisis pasaran menunjukkan bahawa harga WLD purata boleh mencapai $ 1.31, dengan maksimum $ 1.36. Walau bagaimanapun, dalam pasaran beruang, harga mungkin jatuh ke sekitar $ 0.55. Harapan pertumbuhan ini disebabkan terutamanya oleh WorldCoin2.
 Kedudukan pertukaran leverage dalam lingkaran mata wang Cadangan terkini sepuluh pertukaran leverage dalam lingkaran mata wang
Apr 21, 2025 pm 11:24 PM
Kedudukan pertukaran leverage dalam lingkaran mata wang Cadangan terkini sepuluh pertukaran leverage dalam lingkaran mata wang
Apr 21, 2025 pm 11:24 PM
Platform yang mempunyai prestasi cemerlang dalam perdagangan, keselamatan dan pengalaman pengguna yang dimanfaatkan pada tahun 2025 adalah: 1. Okx, sesuai untuk peniaga frekuensi tinggi, menyediakan sehingga 100 kali leverage; 2. Binance, sesuai untuk peniaga berbilang mata wang di seluruh dunia, memberikan 125 kali leverage tinggi; 3. Gate.io, sesuai untuk pemain derivatif profesional, menyediakan 100 kali leverage; 4. Bitget, sesuai untuk orang baru dan peniaga sosial, menyediakan sehingga 100 kali leverage; 5. Kraken, sesuai untuk pelabur mantap, menyediakan 5 kali leverage; 6. Bybit, sesuai untuk penjelajah altcoin, menyediakan 20 kali leverage; 7. Kucoin, sesuai untuk peniaga kos rendah, menyediakan 10 kali leverage; 8. Bitfinex, sesuai untuk bermain senior
 Apakah yang dimaksudkan dengan transaksi rantaian rantaian? Apakah urus niaga salib?
Apr 21, 2025 pm 11:39 PM
Apakah yang dimaksudkan dengan transaksi rantaian rantaian? Apakah urus niaga salib?
Apr 21, 2025 pm 11:39 PM
Pertukaran yang menyokong urus niaga rantaian: 1. Binance, 2. Uniswap, 3 Sushiswap, 4. Kewangan Curve, 5. Thorchain, 6. 1 inci Pertukaran, 7.
 Mengapa kenaikan atau kejatuhan harga mata wang maya? Mengapa kenaikan atau kejatuhan harga mata wang maya?
Apr 21, 2025 am 08:57 AM
Mengapa kenaikan atau kejatuhan harga mata wang maya? Mengapa kenaikan atau kejatuhan harga mata wang maya?
Apr 21, 2025 am 08:57 AM
Faktor kenaikan harga mata wang maya termasuk: 1. Peningkatan permintaan pasaran, 2. Menurunkan bekalan, 3. Berita positif yang dirangsang, 4. Sentimen pasaran optimis, 5. Persekitaran makroekonomi; Faktor penurunan termasuk: 1. Mengurangkan permintaan pasaran, 2. Peningkatan bekalan, 3.
 Platform Pertukaran Cryptocurrency Top 10 senarai pertukaran mata wang digital terbesar di dunia
Apr 21, 2025 pm 07:15 PM
Platform Pertukaran Cryptocurrency Top 10 senarai pertukaran mata wang digital terbesar di dunia
Apr 21, 2025 pm 07:15 PM
Pertukaran memainkan peranan penting dalam pasaran cryptocurrency hari ini. Mereka bukan sahaja platform untuk pelabur untuk berdagang, tetapi juga sumber kecairan pasaran dan penemuan harga. Pertukaran mata wang maya terbesar di dunia di kalangan sepuluh teratas, dan pertukaran ini bukan sahaja jauh ke hadapan dalam jumlah dagangan, tetapi juga mempunyai kelebihan mereka sendiri dalam pengalaman pengguna, perkhidmatan keselamatan dan inovatif. Pertukaran yang atas senarai biasanya mempunyai pangkalan pengguna yang besar dan pengaruh pasaran yang luas, dan jumlah dagangan dan jenis aset mereka sering sukar dicapai oleh bursa lain.
 Cara Memenangi Ganjaran Airdrop Kernel pada Strategi Proses Penuh Binance
Apr 21, 2025 pm 01:03 PM
Cara Memenangi Ganjaran Airdrop Kernel pada Strategi Proses Penuh Binance
Apr 21, 2025 pm 01:03 PM
Dalam dunia kriptografi yang ramai, peluang baru selalu muncul. Pada masa ini, aktiviti udara Kerneldao (kernel) menarik banyak perhatian dan menarik perhatian banyak pelabur. Jadi, apakah asalnya projek ini? Apakah faedah yang boleh diperoleh oleh pemegang BNB? Jangan risau, perkara berikut akan mendedahkannya satu demi satu untuk anda.
 Apakah platform perdagangan blockchain hibrid?
Apr 21, 2025 pm 11:36 PM
Apakah platform perdagangan blockchain hibrid?
Apr 21, 2025 pm 11:36 PM
Cadangan untuk memilih pertukaran cryptocurrency: 1. Untuk keperluan kecairan, keutamaan adalah Binance, Gate.io atau Okx, kerana kedalaman pesanannya dan rintangan volatilitas yang kuat. 2. Pematuhan dan Keselamatan, Coinbase, Kraken dan Gemini mempunyai sokongan pengawalseliaan yang ketat. 3. Fungsi inovatif, reka bentuk derivatif Kucoin yang lembut dan Bybit sesuai untuk pengguna lanjutan.
