

Mengambil stok 20 petunjuk utama untuk pemilihan cip AI pemacu autonomi

Sebagai komponen teras pemanduan autonomi dan "otak" pemanduan autonomi, pengawal pusat biasanya perlu disambungkan kepada berbilang kamera luaran, radar gelombang milimeter, lidar, IMU dan peralatan lain fungsi yang lengkap termasuk Pengecaman imej, pemprosesan data, dsb.
Sebagai perkakasan pintar, pengawal domain perlu menjalankan pemprosesan AI yang memerlukan kuasa pengkomputeran yang besar seperti persepsi persekitaran dan pembelajaran mendalam untuk melengkapkan pengiraan AI yang kompleks dan kawalan pintar . Cip, CPU yang bertanggungjawab untuk mengawal pembuatan keputusan dan operasi logik, dan MCU yang bertanggungjawab untuk keselamatan fungsian dan tahap perisian termasuk sistem pengendalian, perisian tengah dan algoritma AI lapisan aplikasi.
Tiga bahagian cip pada tahap perkakasan, atau tiga cip penting:
Bahagian pertama biasanya GPU atau TPU, bertanggungjawab untuk nombor titik terapung berskala besar Keperluan pengkomputeran selari digunakan terutamanya untuk persepsi alam sekitar dan gabungan maklumat, termasuk pengenalpastian, gabungan dan klasifikasi maklumat kamera, lidar dan penderia lain, seperti unit GPU Xavier dan Ascend 310.
Bahagian kedua kebanyakannya seni bina ARM, serupa dengan CPU, terutamanya bertanggungjawab untuk operasi logik dan kawalan membuat keputusan, dan memproses pengiraan bersiri titik terapung berketepatan tinggi.
Bahagian ketiga bertanggungjawab terutamanya untuk kebolehpercayaan dan kawalan kenderaan, iaitu, keselamatan berfungsi dan pemantauan berlebihan Ia tidak memerlukan kuasa pengkomputeran yang tinggi, tetapi kebolehpercayaan mesti dijamin, ISO26262 Gred keperluan adalah ASIL-D Pada masa ini, TC297 atau TC397 Infineon biasanya digunakan.
Algoritma AI lapisan aplikasi peringkat perisian biasanya dibangunkan oleh pengeluar kereta atau OEM sendiri, yang mencerminkan prestasi kenderaan dan perbezaan secara amnya disediakan oleh pembangun pengawal domain , serupa dengan ROS, terutamanya termasuk beberapa pemacu antara muka dan penggunaan sistem pengendalian yang optimum.
Bagi sistem pengendalian, Huawei menggunakan sistem Hongmeng yang dibangunkan sendiri, dan platform MDC serasi dengan Adaptive AUTOSAR pada masa ini merupakan pilihan terbaik dan satu-satunya untuk gred kereta, tetapi ia menghadapi kos yang tinggi; Linux dan Autoware telah memperoleh paling ramai pengguna kerana sumber terbuka, terutamanya Linux Dengan asas kejuruteraan dan ekosistemnya yang kukuh, ditambah dengan asas aplikasi ROS selama bertahun-tahun, sistem pengendalian berasaskan kernel Linux kini sangat popular.

Mengenai pemilihan cip AI pemanduan autonomi
Pada masa ini tidak banyak cip AI untuk dipilih di pasaran, terutamanya yang telah mencapai pengeluaran besar-besaran, hanya Tesla, NVIDIA, dan Mobileye. Kecuali produk Tesla yang dibangunkan sendiri dan digunakan sendiri, jenama lain pada masa ini boleh mendapatkan sampel ujian melalui pembangunan koperasi.
Ambil NVIDIA Xavier sebagai contoh, kerana NVIDIA Xavier telah dilancarkan lebih awal dan susun atur ekologinya agak lengkap, bagi pembangun, ia boleh. Bina sistem dan bangunkan aplikasi AI dengan pantas, jadi terdapat banyak syarikat yang mereka bentuk pengawal domain berdasarkan modul Xavier.
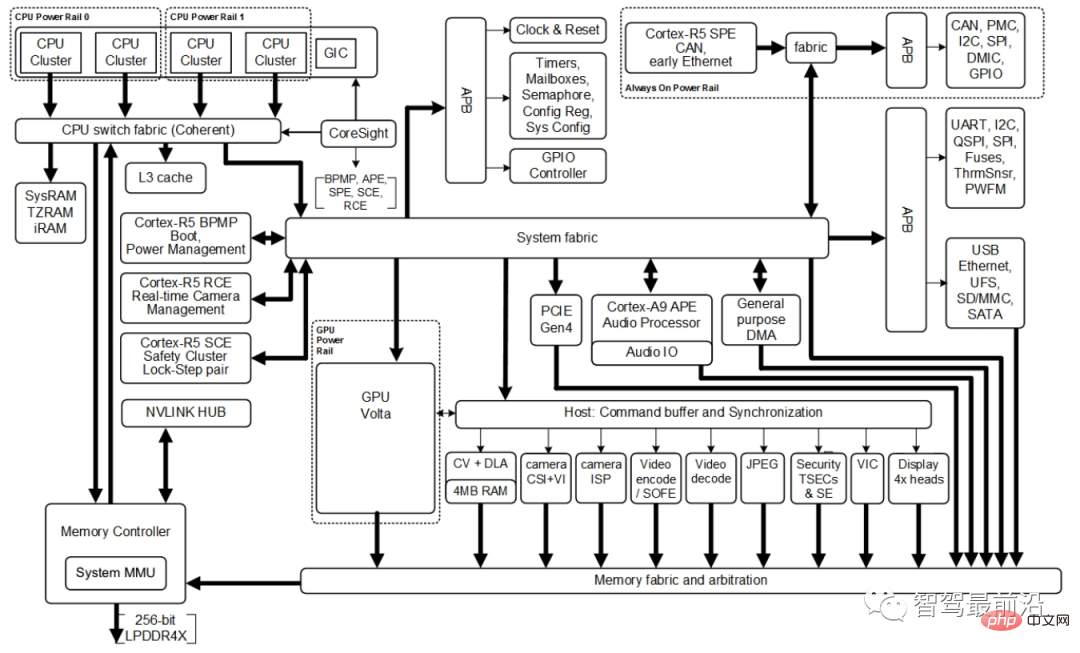
XavierSoC mempunyai kuasa pengkomputeran maksimum sehingga 30TOP, termasuk GPU Valta TensorCore, CPU ARM64 lapan teras, pemecut pembelajaran dalam NVDLA dwi, pemproses imej, pemproses visual dan pemproses video A pelbagai pemproses berbeza membolehkannya memproses berpuluh-puluh algoritma secara serentak dan dalam masa nyata untuk pemprosesan data sensor, persepsi persekitaran, kedudukan dan pemetaan, dan perancangan laluan.
Struktur dalaman cip adalah seperti yang ditunjukkan di bawah:
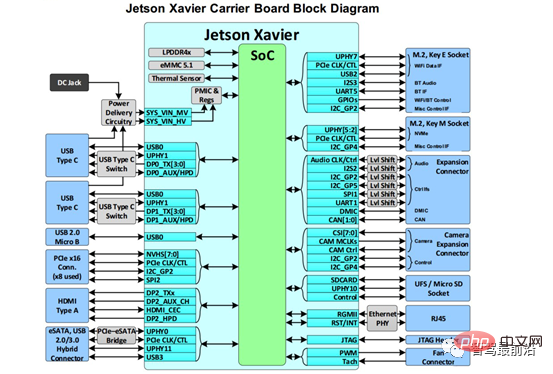
Xavier yang disediakan oleh NVIDIA ialah modul teras. Antara muka adalah seperti yang ditunjukkan di bawah:

Penunjuk utama cip
1)Teras: Teras biasanya merupakan pusat ruang. Di satu pihak, ia memudahkan komunikasi antara pengawal pemanduan automatik dan penderia dan penggerak persisian, dan pada masa yang sama, ia juga menggunakan pinggiran untuk melindunginya. Teras menekankan keadaan berjalan Teras ke bawah biasanya merujuk kepada masalah dalam pengiraan CPU Teras menekankan fungsi teras keseluruhan fungsi luaran pengawal pemanduan automatik.
2) DMIPS: Terutamanya digunakan untuk mengukur keupayaan pengkomputeran integer. Ia termasuk bilangan set arahan yang boleh dilaksanakan sesaat, dan bilangan tugas yang boleh dicapai oleh set arahan ini sesaat apabila melaksanakan program ujian saya Keupayaan ini ditentukan oleh seni bina CPU, kelajuan akses memori dan ciri perkakasan lain. buat keputusan. Ia ialah unit yang mengukur prestasi relatif CPU semasa menjalankan program ujian yang sepadan (dalam banyak situasi penilaian cip pemanduan autonomi, orang ramai terbiasa menggunakan MIPS sebagai unit penunjuk prestasi ini).
3) Memori: Fungsi utama unit pengurusan memori termasuk: alamat maya kepada pemetaan alamat fizikal, kawalan akses memori, sokongan cache, dsb.
4) DataFlash: DataFlash ialah produk memori Flash siri berkapasiti besar yang dilancarkan oleh syarikat ATMEL Amerika Ia dihasilkan menggunakan teknologi Nor dan boleh digunakan untuk menyimpan data dan kod program. Berbanding dengan memori Flash selari, ia memerlukan lebih sedikit pin, bersaiz kecil, mudah dikembangkan, mudah untuk disambungkan kepada mikropengawal atau pengawal, dan boleh dipercayai dalam operasi Oleh itu, pengawal Flash bersiri yang serupa dengan DataFlash semakin digunakan dalam pengawal pemanduan automatik. Produk dan sistem pengukuran dan kawalan sedang dalam penilaian.
5) ISP: Sebagai teras cip pemprosesan visual, fungsi utama ISP termasuk AE (pendedahan automatik), AF (fokus automatik), AWB (imbangan putih automatik), penyingkiran hingar imej, LSC (Pembetulan Teduhan Lensa), BPC (Pembetulan Piksel Buruk), dan akhirnya simpan Data Mentah dan hantarkannya kepada videocodec atau CV, dsb. Kesan imej yang lebih baik boleh diperolehi melalui ISP, jadi keperluan untuk ISP dalam kereta pandu sendiri adalah sangat tinggi Sebagai contoh, ISP dwi-saluran atau tiga saluran mula disepadukan. Secara umumnya, ISP disepadukan ke dalam AP (untuk kebanyakan pengeluar cip AP, ini adalah bahagian penting dalam persaingan yang berbeza), tetapi apabila keperluan berubah, ISP bebas juga muncul kerana ia boleh dikonfigurasikan dengan lebih fleksibel masa yang sama, ia menebus dan bekerjasama dengan kekurangan fungsi ISP dalam cip AP.
6) Kuasa pengkomputeran: Realisasi pemanduan autonomi memerlukan bergantung pada penderia penderiaan persekitaran untuk mengumpul maklumat tentang persekitaran jalan raya dan menghantar data yang dikumpul kepada pemproses pusat kereta untuk diproses mengenal pasti halangan, jalan yang boleh dilaksanakan, dsb., berdasarkan hasil pengecaman, rancang laluan, tetapkan kelajuan kenderaan, dan kawal pemanduan kenderaan secara automatik. Keseluruhan proses perlu diselesaikan dalam sekelip mata, dan kelewatan mesti dikawal pada tahap milisaat atau bahkan mikrosaat untuk memastikan keselamatan pemanduan autonomi. Untuk mencapai kesan pemprosesan segera, maklum balas, membuat keputusan, perancangan dan pelaksanaan, keperluan kuasa pengkomputeran pemproses pusat adalah sangat tinggi.
Dalam pemanduan autonomi, pemprosesan visual menggunakan kuasa pengkomputeran yang paling banyak, menyumbang lebih separuh daripada jumlah keperluan kuasa pengkomputeran Setiap kali tahap pemanduan autonomi meningkat, kuasa pengkomputeran dikurangkan dengan banyaknya . permintaan telah meningkat sekurang-kurangnya sepuluh kali ganda. Tahap L2 memerlukan 2 TOPS kuasa pengkomputeran, L3 memerlukan 24 TOPS kuasa pengkomputeran, L4 ialah 320TOPS, dan L5 ialah 4000+TOPS.
Kuasa pengkomputeran sahaja tidak mencukupi Memandangkan kerumitan aplikasi automotif, pemproses automotif juga perlu mempertimbangkan penggunaan kuasa pengkomputeran dan sama ada untuk lulus kereta. peraturan dan piawaian keselamatan, dsb. Nilai teori kuasa pengkomputeran bergantung pada ketepatan pengiraan, bilangan MAC dan kekerapan operasi.
Kuasa pengkomputeran teori dikira berdasarkan pengumpulan operasi pendaraban lapisan lilitan Bersih Setiap pengumpulan darab (MAC) dalam lapisan lilitan dikira sebagai dua OPS, dan jumlahnya operasi lilitan Mengakaunkan lebih daripada 90% DL NET, operasi tambahan lain atau operasi lapisan lain diabaikan Jumlah bilangan operasi pendaraban semua lapisan konvolusi SSD ialah 40G MAC, jadi kuasa pengkomputeran teori ialah 80GOPS.
Antaranya,

Nilai sebenar dan nilai teori adalah sangat berbeza, memandangkan pengkomputeran lain lapisan, perkakasan Kadar penggunaan sebenar adalah lebih tinggi. Faktor terpenting yang menentukan nilai sebenar kuasa pengkomputeran ialah lebar jalur memori (SRAM dan DRAM), kekerapan operasi sebenar (iaitu, voltan atau suhu bekalan), dan saiz kelompok algoritma.
7) Penggunaan kuasa: Dalam mod prestasi tertinggi, jika tahap penggunaan kuasa cip pengawal pemanduan automatik adalah tinggi, walaupun prestasinya sendiri kukuh, ia akan menyebabkan beberapa bahaya tersembunyi yang tidak dapat diramalkan, seperti The haba meningkat secara eksponen dan kadar penggunaan kuasa meningkat secara eksponen Keputusan ini sudah pasti "bom nuklear" terutamanya untuk kenderaan tenaga baru. Oleh itu, kita perlu mempertimbangkan sepenuhnya penunjuk penggunaan kuasanya dalam reka bentuk awal cip pemanduan autonomi.
8) GPU 3D: GPU direka berdasarkan daya pemprosesan yang besar dan digunakan untuk mengendalikan pengkomputeran selari berskala besar. Unit kawalan GPU boleh menggabungkan berbilang akses kepada akses yang lebih sedikit. GPU menggunakan lebih banyak transistor untuk unit pelaksanaan dan bukannya cache data kompleks dan kawalan arahan seperti CPU. Oleh kerana GPU mempunyai keupayaan pengkomputeran titik terapung super, ia boleh digunakan dalam medan pemprosesan imej atau video bahagian hadapan kereta pintar Ia juga semakin digunakan dalam reka bentuk arus perdana pengkomputeran berprestasi tinggi untuk pengawal pusat.
9) Sumber antara muka IO yang kaya
Pemproses kawalan utama pemanduan autonomi memerlukan antara muka yang kaya untuk menyambungkan pelbagai peralatan penderia. Pada masa ini, penderia pemanduan autonomi biasa dalam industri terutamanya termasuk: kamera, lidar, radar gelombang milimeter, radar ultrasonik, navigasi bersepadu, modul IMU dan V2X.
- Jenis antara muka utama untuk kamera ialah: MIPI CSI-2, LVDS, FPD Link, dsb.
- Lidar biasanya disambungkan melalui antara muka Ethernet biasa.
- Radar gelombang milimeter menghantar data melalui bas CAN
- Radar ultrasonik pada asasnya menghantar data melalui bas LIN
- Antara muka biasa untuk navigasi bersepadu dan navigasi inersia IMU ialah RS232
- Modul V2X biasanya menggunakan antara muka Ethernet untuk menghantar data
Selain antara muka IO yang diperlukan oleh penderia di atas, antara muka berkelajuan tinggi biasa yang lain dan antara muka berkelajuan rendah juga diperlukan, seperti: PCIe, USB, I2C, SPI, RS232, dsb.
10) PCIe: Sebagai bas tempatan CPU, ciri terbesarnya ialah daya pemprosesan data yang tinggi dan kependaman rendah.
11)SaftyGoal: Matlamat keselamatan fungsional ialah keperluan reka bentuk teras bagi keseluruhan pengawal pusat pemanduan autonomi Disebabkan kesannya pada analisis kegagalan titik tunggal menghasilkan keseluruhan reka bentuk fungsi pemanduan autonomi , oleh itu, Pada peringkat awal reka bentuk perkakasan, adalah perlu untuk mempertimbangkan sepenuhnya sama ada ia dapat memenuhi sepenuhnya keperluan reka bentuk keselamatan berfungsi sistem untuk perkakasan.
12) OTA: Naik taraf jauh membaiki kerosakan perisian untuk pengguna, sangat memendekkan masa langkah perantaraan, membolehkan perisian menjangkau pengguna dengan cepat, dan boleh menambah fungsi baharu pada kenderaan dan meluaskan " perkhidmatan" dan kategori "operasi". Oleh itu, sama ada cip pengawal pusat menyokong OTA adalah amat diperlukan untuk mengurangkan kos pengeluar dan pengguna kereta, termasuk kos panggil balik pengeluar kereta, kos masa pengguna, meningkatkan kesegaran pengguna, dan meningkatkan nilai tambah kenderaan.
13) Jenis pakej: Saiz pakej pengawal, takrifan pin, dsb. mempengaruhi bentuk pemasangan pengawal pemanduan keseluruhan, dan juga mempengaruhi pengagihan sambungan kepada komponen persisian. Di samping itu, sama ada antara muka kalis air, jika kalis air, persekitaran pemasangan pengawal boleh menjadi agak bebas. Walau bagaimanapun, antara muka kawalan domain semasa tidak kalis air.
14) Suhu/Voltan: Julat kawalan suhu pengawal termasuk penyimpanan dan penggunaan suhu ambien, dan kemudian jika kenderaan sebenar disahkan, penyimpanan kawasan susun atur pemasangan pengawal gelombang milimeter dan penggunaan Jika suhu ambien lebih tinggi daripada nilai ini, tahap tertentu pembetulan dan pelarasan ke atas diperlukan atas dasar ini untuk memenuhi keperluan OEM, dan pembekal perlu memastikan tiada penarikan balik disebabkan oleh kecacatan reka bentuk perkakasan. Terutamanya apabila kuasa pengkomputeran mencapai lebih daripada 100 dan penggunaan kuasa melebihi 60W, kenaikan suhu berkemungkinan besar akan memerlukan penyejukan aktif untuk memastikan haba boleh dipindahkan keluar dalam masa tanpa menjejaskan operasi biasa pengawal. Penyejukan aktif secara amnya termasuk: penyejukan kipas dan penyejukan air.
15) Peraturan kereta dan keselamatan berfungsi: Berbanding dengan produk elektronik pengguna, cip automotif mempunyai keperluan tertinggi dari segi keselamatan dan kebolehpercayaan.
Cip automotif telah berfungsi dalam persekitaran yang keras iaitu suhu tinggi dan rendah "-40℃ hingga 125℃" serta getaran teruk selama bertahun-tahun untuk memastikan produk elektronik automotif memenuhi keperluan kualiti standard yang tinggi untuk beroperasi suhu, kebolehpercayaan dan hayat produk , Majlis Elektronik Automotif Antarabangsa (AEC) telah menetapkan piawaian pensijilan kualiti yang berkaitan, antaranya AEC-Q100 ialah piawaian pensijilan untuk ujian tekanan litar bersepadu automotif. Selepas bertahun-tahun pembangunan, piawaian AEC-Q100 telah menjadi piawaian de facto industri untuk produk elektronik automotif dari segi kebolehpercayaan dan hayat produk.
Selain memenuhi keperluan pengawalseliaan kenderaan, cip pemanduan autonomi juga perlu memenuhi keperluan pensijilan untuk "Keselamatan Fungsi (Fusa)" yang ditakrifkan oleh piawaian ISO 26262. Keperluan reka bentuk keselamatan fungsional untuk cip adalah untuk mencari dan membetulkan kegagalan cip sebanyak mungkin (terbahagi kepada: kegagalan sistem dan kegagalan rawak). Kegagalan sistem pada asasnya adalah kecacatan dalam reka bentuk produk, jadi ia bergantung terutamanya pada spesifikasi proses reka bentuk dan pelaksanaan, manakala kegagalan rawak lebih bergantung pada mekanisme pengesanan kegagalan khas dalam reka bentuk cip.
ISO 26262 membahagikan tahap keselamatan, yang paling biasa ialah ASIL-B dan ASIL-D. ASIL-B memerlukan cip untuk menampung 90% senario kegagalan titik tunggal, manakala ASIL-D memerlukan 99%. Lebih besar kawasan cip dan lebih banyak transistor, lebih tinggi kadar kegagalan yang sepadan.
16) Sistem cip: Contohnya, sama ada pengawal menyokong kaedah kawalan bersepadu MCU+MPU, atau hanya menyokong kawalan cip tunggal.
17) Keselamatan rantaian bekalan: Permintaan pasaran yang lebih besar telah menyebabkan kekurangan dalam rantaian bekalan semikonduktor dan kapasiti pengeluaran, termasuk pelbagai "bencana alam" yang mengganggu rentak pengeluaran biasa semikonduktor, dan jurang antara permintaan dan kapasiti pengeluaran Konflik sukar diselesaikan dalam jangka pendek.
Dengan rantaian bekalan cip global yang begitu ketat, keselamatan rantaian bekalan juga sangat mencabar bagi pembekal pengawal domain. Apabila OEM memilih pembekal pengawal domain, keupayaan bekalan pengeluar cip rakan kongsi mereka juga merupakan pertimbangan penting.
Pada tahun 2022, kekurangan cip masih menjejaskan industri automotif Sesetengah OEM telah mula memikirkan idea baharu untuk bekalan semikonduktor, malah ada yang telah memintas Tahap 1 dan pergi terus ke reka bentuk cip. pengilang. OEM yang lebih mendalam telah mula mengambil bahagian dalam proses penyelidikan dan pembangunan reka bentuk cip. Sebagai contoh, banyak syarikat kereta telah mewujudkan perkongsian strategik dengan pengeluar cip AI pemanduan autonomi seperti Black Sesame dan Horizon. Lebih-lebih lagi, mereka terus menembusi rantaian bekalan semikonduktor dan memperkenalkan reka bentuk cip ke dalam kilang enjin utama Model ini dipanggil model "OEM-Foundry-Direct", dan syarikat perwakilan termasuk Tesla, BYD, dll.
18) Kedudukan pasaran: Apakah jenis cip kawalan utama untuk dipilih, anda mesti terlebih dahulu melihat pada kedudukan pasaran pengawal domain: jenis fungsi yang ia merancang untuk melaksanakan, dan dalam berapa julat harga yang dikonfigurasikan pada model kereta.
Jika matlamatnya adalah untuk membantu pemanduan dan membuat produk L1~L2, dan ia dalam jumlah, anda akan sangat sensitif terhadap kos apabila memilih cip. Untuk produk kawalan domain sedemikian, hanya pilih cip pertengahan hingga rendah.
“Jika matlamatnya adalah untuk mencipta kereta pandu sendiri dalam senario terhad peringkat L4, maka pelanggan mungkin lebih cenderung untuk mencipta produk tersuai Sebagai contoh, meletakkan Robotaxi merancang mengguna pakai model operasi, dan tujuannya adalah untuk menggilap algoritma terlebih dahulu volumnya tidak akan terlalu besar, jadi apabila memilih cip, ia agak kurang sensitif terhadap kos, tetapi prestasinya perlu cukup baik dan cukup stabil. "
19) Pelan hala tuju cip: Liu Wei, timbalan pengurus besar Neusoft Reach, menyebut: "Dari sudut kerjasama dengan syarikat cip, ia bergantung kepada sama ada ia adalah cip arus perdana. Adakah pengilang mempunyai peta jalan produk yang berterusan Sebagai contoh, beberapa pengeluar cip mungkin telah membangunkan cip yang baik, tetapi ia tidak dikemas kini kemudiannya masalah."
Begitu juga, Li Maoqing, ketua reka bentuk sistem pemanduan pintar di Joyson Electronics, turut menyebut perkara yang sama: "Pemilihan penyelesaian perkakasan dalam reka bentuk sistem pengawal domain memberi perhatian kepada prestasi fungsi cip itu sendiri, anda juga perlu memahami sepenuhnya pelan hala tuju produk syarikat cip, sama ada terdapat siri cip keluarga yang fleksibel, dan sama ada cip berikutnya boleh dinaik taraf pada PIN platform perkakasan kepada PIN, supaya meningkatkan prestasi perkakasan sambil mengurangkan kos pembangunan”
20) Ekologi cip (rantaian alat): Sama ada keseluruhan rangkaian alat perisian cip atau pembangunan beberapa algoritma dapat memenuhi keperluan pelanggan. Dalam erti kata lain, apakah ekologi cip itu sama ada terdapat ekosistem yang baik yang boleh menyokong pelanggan untuk melaksanakan pembangunan praktikal juga merupakan salah satu pertimbangan penting untuk OEM atau Tahap 1 apabila memilih cip.
Ekosistem cip Nvidia agak terkemuka dalam industri Ekosistemnya termasuk pembangun, perisian aplikasi yang tersedia dan alatan serta perpustakaan yang kaya:
- <.>Boleh menyediakan bakat algoritma perisian yang banyak untuk bidang automotif; Perkakasan bersatu dan seni bina antara muka perisian asas (CUDA-X) boleh dipindahkan dengan mudah ke medan automotif
- Disebabkan bilangan pengguna yang ramai, Rakan Kongsi menyumbang; sejumlah besar perpustakaan dan alatan ke platform CUDA.
-
Pengarah R&D Perkakasan Teknologi Zhixing menjelaskan: “Ramai OEM kini menggunakan cip Orin NVIDIA, kecuali ia adalah satu lagi sebab penting untuk platform kuasa pengkomputeran ialah ia boleh menyediakan keseluruhan rangkaian alat perisian, malah beberapa kod asas dan beberapa kod algoritma boleh membuat lebih banyak penyesuaian padanya dan membangunkan lebih baik Untuk mencipta platform pengkomputeran autonomi termaju yang boleh dilaksanakan Selain cip itu sendiri, memilih cip lebih kepada memilih ekosistem "
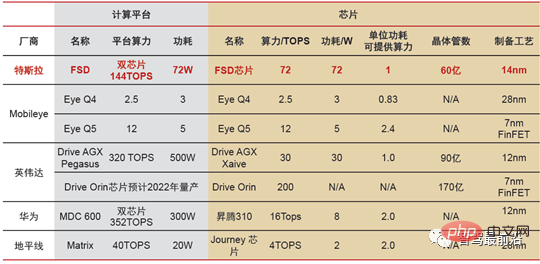
Seperti yang dinyatakan di atas untuk pengawal domain pemanduan autonomi. Terdapat beberapa faktor penting dalam proses pemilihan. Kami. menjalankan analisis statistik pada cip pengawal arus perdana di pasaran dan memperoleh jadual perbandingan hasil analisis berikut:
Atas ialah kandungan terperinci Mengambil stok 20 petunjuk utama untuk pemilihan cip AI pemacu autonomi. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

AI Hentai Generator
Menjana ai hentai secara percuma.

Artikel Panas
Alat panas

Notepad++7.3.1
Editor kod yang mudah digunakan dan percuma

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

Hantar Studio 13.0.1
Persekitaran pembangunan bersepadu PHP yang berkuasa

Dreamweaver CS6
Alat pembangunan web visual

SublimeText3 versi Mac
Perisian penyuntingan kod peringkat Tuhan (SublimeText3)
Topik panas
 1382
1382
 52
52

 Baris arahan shutdown centos
Apr 14, 2025 pm 09:12 PM
Baris arahan shutdown centos
Apr 14, 2025 pm 09:12 PM
Perintah shutdown CentOS adalah penutupan, dan sintaks adalah tutup [pilihan] [maklumat]. Pilihan termasuk: -h menghentikan sistem dengan segera; -P mematikan kuasa selepas penutupan; -r mulakan semula; -T Waktu Menunggu. Masa boleh ditentukan sebagai segera (sekarang), minit (minit), atau masa tertentu (HH: mm). Maklumat tambahan boleh dipaparkan dalam mesej sistem.
 Apakah kaedah sandaran untuk gitlab di centos
Apr 14, 2025 pm 05:33 PM
Apakah kaedah sandaran untuk gitlab di centos
Apr 14, 2025 pm 05:33 PM
Dasar sandaran dan pemulihan Gitlab di bawah sistem CentOS untuk memastikan keselamatan data dan pemulihan, Gitlab pada CentOS menyediakan pelbagai kaedah sandaran. Artikel ini akan memperkenalkan beberapa kaedah sandaran biasa, parameter konfigurasi dan proses pemulihan secara terperinci untuk membantu anda menubuhkan strategi sandaran dan pemulihan GitLab lengkap. 1. Backup Manual Gunakan Gitlab-Rakegitlab: Backup: Buat Perintah untuk Melaksanakan Backup Manual. Perintah ini menyokong maklumat utama seperti repositori Gitlab, pangkalan data, pengguna, kumpulan pengguna, kunci, dan kebenaran. Fail sandaran lalai disimpan dalam direktori/var/opt/gitlab/sandaran. Anda boleh mengubah suai /etc /gitlab
 Cara Memeriksa Konfigurasi HDFS CentOS
Apr 14, 2025 pm 07:21 PM
Cara Memeriksa Konfigurasi HDFS CentOS
Apr 14, 2025 pm 07:21 PM
Panduan Lengkap untuk Memeriksa Konfigurasi HDFS Dalam Sistem CentOS Artikel ini akan membimbing anda bagaimana untuk memeriksa konfigurasi dan menjalankan status HDFS secara berkesan pada sistem CentOS. Langkah -langkah berikut akan membantu anda memahami sepenuhnya persediaan dan operasi HDFS. Sahkan Pembolehubah Alam Sekitar Hadoop: Pertama, pastikan pembolehubah persekitaran Hadoop ditetapkan dengan betul. Di terminal, laksanakan arahan berikut untuk mengesahkan bahawa Hadoop dipasang dan dikonfigurasi dengan betul: Hadoopversion Semak fail konfigurasi HDFS: Fail konfigurasi teras HDFS terletak di/etc/hadoop/conf/direktori, di mana core-site.xml dan hdfs-site.xml adalah kritikal. gunakan
 Apakah kaedah penalaan prestasi zookeeper di CentOS
Apr 14, 2025 pm 03:18 PM
Apakah kaedah penalaan prestasi zookeeper di CentOS
Apr 14, 2025 pm 03:18 PM
Penalaan prestasi zookeeper pada centOs boleh bermula dari pelbagai aspek, termasuk konfigurasi perkakasan, pengoptimuman sistem operasi, pelarasan parameter konfigurasi, pemantauan dan penyelenggaraan, dan lain -lain. Memori yang cukup: memperuntukkan sumber memori yang cukup untuk zookeeper untuk mengelakkan cakera kerap membaca dan menulis. CPU multi-teras: Gunakan CPU multi-teras untuk memastikan bahawa zookeeper dapat memprosesnya selari.
 Cara Melatih Model Pytorch di CentOs
Apr 14, 2025 pm 03:03 PM
Cara Melatih Model Pytorch di CentOs
Apr 14, 2025 pm 03:03 PM
Latihan yang cekap model pytorch pada sistem CentOS memerlukan langkah -langkah, dan artikel ini akan memberikan panduan terperinci. 1. Penyediaan Persekitaran: Pemasangan Python dan Ketergantungan: Sistem CentOS biasanya mempamerkan python, tetapi versi mungkin lebih tua. Adalah disyorkan untuk menggunakan YUM atau DNF untuk memasang Python 3 dan menaik taraf PIP: Sudoyumupdatepython3 (atau SudodnfupdatePython3), pip3install-upgradepip. CUDA dan CUDNN (Percepatan GPU): Jika anda menggunakan Nvidiagpu, anda perlu memasang Cudatool
 Bagaimana sokongan GPU untuk Pytorch di CentOS
Apr 14, 2025 pm 06:48 PM
Bagaimana sokongan GPU untuk Pytorch di CentOS
Apr 14, 2025 pm 06:48 PM
Membolehkan pecutan GPU pytorch pada sistem CentOS memerlukan pemasangan cuda, cudnn dan GPU versi pytorch. Langkah-langkah berikut akan membimbing anda melalui proses: Pemasangan CUDA dan CUDNN Tentukan keserasian versi CUDA: Gunakan perintah NVIDIA-SMI untuk melihat versi CUDA yang disokong oleh kad grafik NVIDIA anda. Sebagai contoh, kad grafik MX450 anda boleh menyokong CUDA11.1 atau lebih tinggi. Muat turun dan pasang Cudatoolkit: Lawati laman web rasmi Nvidiacudatoolkit dan muat turun dan pasang versi yang sepadan mengikut versi CUDA tertinggi yang disokong oleh kad grafik anda. Pasang Perpustakaan Cudnn:
 Penjelasan terperinci mengenai Prinsip Docker
Apr 14, 2025 pm 11:57 PM
Penjelasan terperinci mengenai Prinsip Docker
Apr 14, 2025 pm 11:57 PM
Docker menggunakan ciri -ciri kernel Linux untuk menyediakan persekitaran berjalan yang cekap dan terpencil. Prinsip kerjanya adalah seperti berikut: 1. Cermin digunakan sebagai templat baca sahaja, yang mengandungi semua yang anda perlukan untuk menjalankan aplikasi; 2. Sistem Fail Kesatuan (Unionfs) menyusun pelbagai sistem fail, hanya menyimpan perbezaan, menjimatkan ruang dan mempercepatkan; 3. Daemon menguruskan cermin dan bekas, dan pelanggan menggunakannya untuk interaksi; 4. Ruang nama dan cgroups melaksanakan pengasingan kontena dan batasan sumber; 5. Pelbagai mod rangkaian menyokong interkoneksi kontena. Hanya dengan memahami konsep -konsep teras ini, anda boleh menggunakan Docker dengan lebih baik.
 Apakah dasar keselamatan PHP di CentOs
Apr 14, 2025 pm 02:33 PM
Apakah dasar keselamatan PHP di CentOs
Apr 14, 2025 pm 02:33 PM
Penjelasan terperinci mengenai CentOS Server PHP Dasar Keselamatan: Membina Sistem Perlindungan Pepejal Artikel ini akan meneroka secara mendalam bagaimana untuk membina persekitaran operasi PHP yang selamat pada sistem CentOS, yang meliputi pelbagai aspek seperti tahap sistem, konfigurasi PHP, pengurusan kebenaran, penyulitan HTTPS dan pemantauan keselamatan, dan lain-lain, untuk membantu anda dengan berkesan mengurangkan risiko serangan pelayan. Keselamatan pelayan adalah proses penambahbaikan berterusan yang memerlukan semakan dan kemas kini secara teratur ke dasar keselamatan. 1. Sistem Keselamatan Sistem Cornerstone Sistem Kemas kini: Simpan versi terkini sistem CentOS dan semua pakej perisian, pasangkan patch keselamatan tepat pada masanya, dan plag kelemahan yang diketahui. Perlindungan Firewall: Gunakan firewalld untuk mengendalikan akses rangkaian pelayan halus, dan hanya port yang diperlukan (seperti port HTTP 80 dan h
