

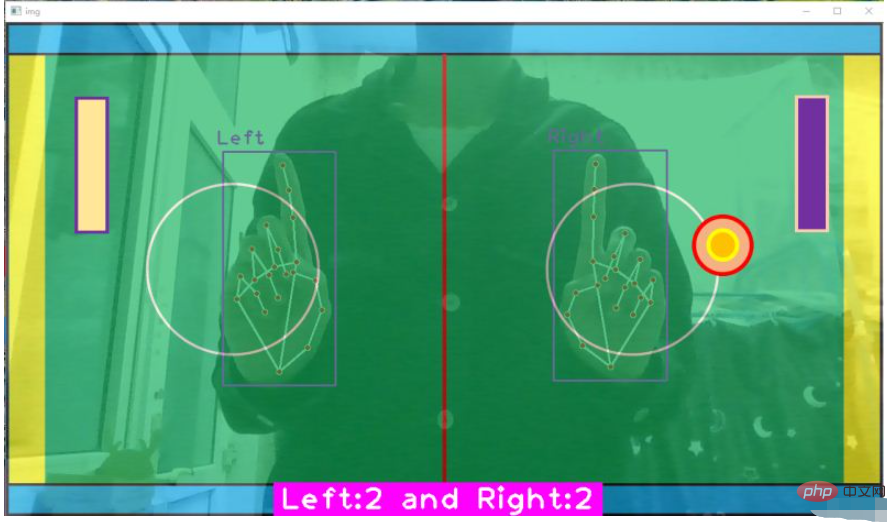
Peraturannya adalah seperti berikut: tangan kiri mengawal raket berwarna ungu; bola bertembung dengan sempadan biru di bahagian atas dan bawah, dan raket akan melantun jika bola memasuki kawasan kuning, permainan telah tamat; .
pip install opencv_python==4.2.0.34 # 安装opencv pip install mediapipe # 安装mediapipe # pip install mediapipe --user #有user报错的话试试这个 pip install cvzone # 安装cvzone # 导入工具包 import cv2 import cvzone from cvzone.HandTrackingModule import HandDetector # 导入手部检测模块
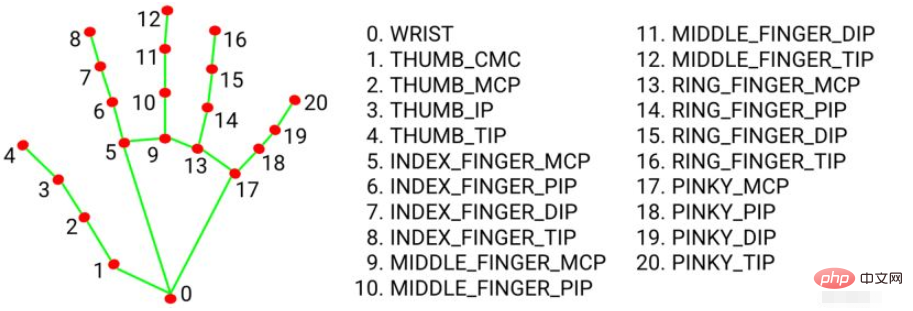
Koordinat bagi 21 titik kunci tangan adalah seperti berikut:
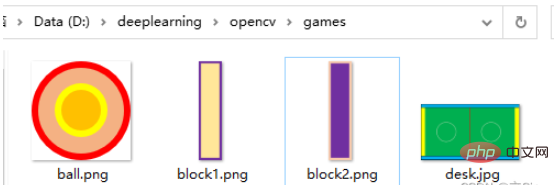
Sebelum anda bermula, sediakan gambar meja, bola dan raket. Saya melukis gambar menggunakan PPT, dan gambar bola dan raket mesti disimpan dalam format .png. Letakkannya dalam folder yang sama untuk bacaan mudah.
(1) cvzone.HandTrackingModule.HandDetector()Pengesanan Titik kunci tangan kaedah
Parameter:
mod: Lalai ialah Palsu, menganggap imej input sebagai strim video. Ia akan cuba mengesan tangan dalam imej input pertama dan seterusnya mengesan koordinat tangan selepas pengesanan berjaya. Dalam imej seterusnya, sebaik sahaja semua tangan maxHands dikesan dan koordinat tangan yang sepadan terletak, ia menjejaki koordinat tersebut tanpa memanggil pengesanan lain sehingga ia kehilangan pengesanan mana-mana satu tangan. Ini mengurangkan kependaman dan sesuai untuk memproses bingkai video. Jika ditetapkan kepada Benar, pengesanan tangan dijalankan pada setiap imej input, untuk memproses sekumpulan imej statik yang mungkin tidak berkaitan.
maxHands: Bilangan maksimum tangan untuk dikesan, lalai ialah 2
detectionCon: Nilai keyakinan minimum model pengesanan tangan (antara 0-1), jika ia melebihi ambang, pengesanan berjaya. Lalai ialah 0.5
minTrackingCon: Nilai keyakinan minimum model penjejakan koordinat (antara 0-1), yang digunakan untuk menganggap koordinat tangan sebagai penjejakan yang berjaya Jika tidak berjaya, pengesanan tangan akan dipanggil secara automatik imej input seterusnya. Menetapkannya kepada nilai yang lebih tinggi meningkatkan keteguhan penyelesaian, tetapi pada kos kependaman yang lebih tinggi. Jika mod adalah Benar, parameter ini diabaikan dan pengesanan tangan akan dijalankan pada setiap imej. Lalai ialah 0.5
Parameter dan nilai pulangannya adalah serupa dengan fungsi rasmi mediapipe.solutions.hands.Hands()
MULTI_HAND_LANDMARKS: Koleksi tangan yang dikesan/dijejaki, di mana setiap tangan berada Diwakili sebagai senarai 21 tanda tempat tangan, setiap satu terdiri daripada x, y, z.
MULTI_HANDEDNESS: Koleksi sama ada tangan yang dikesan/dijejaki kiri atau kanan. Setiap tangan terdiri daripada label dan skor. label ialah rentetan dengan nilai 'Kiri' atau 'Kanan'. skor ialah anggaran kebarangkalian untuk meramalkan tangan kiri atau kanan.
(2)cvzone.HandTrackingModule.HandDetector.findHands() Cari mata utama tangan dan lukis
Parameter:
img: Imej bingkai yang perlu mengesan titik utama, format ialah BGR
lukisan: Sama ada perlu untuk melukis mata utama dan bingkai pengecaman pada imej asal
flipType: Sama ada imej itu perlu diterbalikkan Apabila imej video bukan imej cermin daripada diri kita, cuma tetapkan kepada Benar
Nilai pulangan:
tangan: Maklumat tangan yang dikesan, senarai yang terdiri daripada 0 atau 1 atau 2 kamus. Jika dua tangan dikesan ia adalah senarai yang terdiri daripada dua kamus. Kamus mengandungi: 21 koordinat titik utama (x, y, z), koordinat kiri atas bingkai pengesanan dan lebar dan tingginya, koordinat titik tengah bingkai pengesanan dan tangan yang dikesan.
img: Mengembalikan imej selepas melukis titik utama dan sambungan
(3) cv2.addWeighted()Penyatuan imej
Gabungan dua imej bersama mengikut perkadaran tertentu, Saiz dan bilangan saluran kedua-dua imej perlu sama
Kedua-dua imej digabungkan pada nisbah tertentu: cv2.addWeighted(imej 1, berat 1, imej 2, berat 2, offset kecerahan)
Bersamaan dengan y = a x1 + b x2 + c, dengan a dan b mewakili pemberat, dan c mewakili berapa banyak kecerahan yang dicerahkan
Pertama sekali, parameter dalam cv2.imread() cv2.IMREAD_UNCHANGED bermaksud membuka imej dalam format asalnya, termasuk saluran Alpha. Iaitu, buka tanpa menukar gambar Jika gambar itu berwarna, maka ia akan dibaca dalam warna Jika gambar itu berwarna kelabu, maka ia akan dibaca dalam skala kelabu.
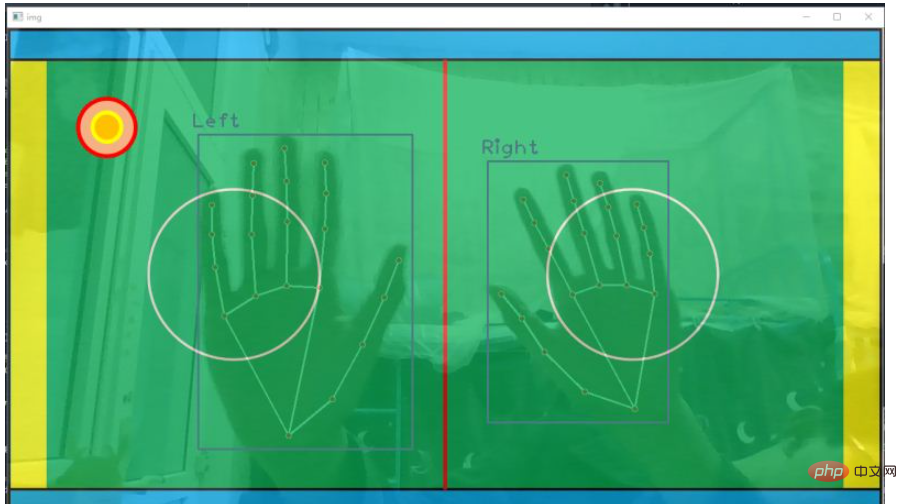
Bahagian kod ini bertanggungjawab terutamanya untuk pengesanan titik kunci tangan dan gabungan imej latar belakang dan imej bingkai video
import cv2
import cvzone
from cvzone.HandTrackingModule import HandDetector # 导入手部检测模块
#(1)捕获摄像头
cap = cv2.VideoCapture(0) # 0代表电脑自带的摄像头
cap.set(3, 1280) # 读入的图像的宽
cap.set(4, 720) # 读入的图像的高
#(2)文件配置
# 导入所有需要对图片文件
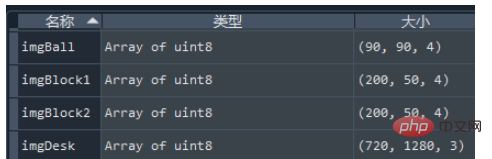
imgDesk = cv2.imread('games/desk.jpg') # 球桌的图片
imgBall = cv2.imread('games/ball.png', cv2.IMREAD_UNCHANGED) # 球的图片
imgBlock1 = cv2.imread('games/block1', cv2.IMREAD_UNCHANGED) # 球拍的图片
imgBlock2 = cv2.imread('games/block2', cv2.IMREAD_UNCHANGED) # 球拍的图片
# 调整球桌图片的size
imgDesk = cv2.resize(imgDesk, dsize=(1280,720))
#(3)参数设置
# 接收手部关键点识别的方法,最小手部检测模块置信度0.8,最多检测2只手
detector = HandDetector(detectionCon=0.8, maxHands=2)
#(4)处理帧图像
while True:
# 返回是否读取成功,以及读取后的帧图像
success, img = cap.read() # 每次执行读取一帧
# 图片翻转呈镜像关系,1代表左右翻转,0代表上下翻转
img = cv2.flip(img, flipCode=1)
# 手部关键点检测,返回每个只手的信息和绘制后的图像
hands, img = detector.findHands(img, flipType=False) # 上面翻转过了这里就不用翻转了
# 将球桌图片和视频帧图像融合在一起, 两张图的shape要相同
# 给出每张图片的融合权重, 亮度偏置为0,这样就变成了半透明的显示形式
img = cv2.addWeighted(img, 0.3, imgDesk, 0.7, 0)
#(5)添加桌球的图片,将imgBall放在球桌img的指定坐标位置
img = cvzone.overlayPNG(img, imgBall, (100,100))
# 图像展示
cv2.imshow('img', img)
# 每帧滞留1ms后消失
k = cv2.waitKey(1)
# ESC键退出程序
if k & 0XFF==27:
break
# 释放视频资源
cap.release()
cv2.destroyAllWindows()Perenderan adalah seperti berikut:
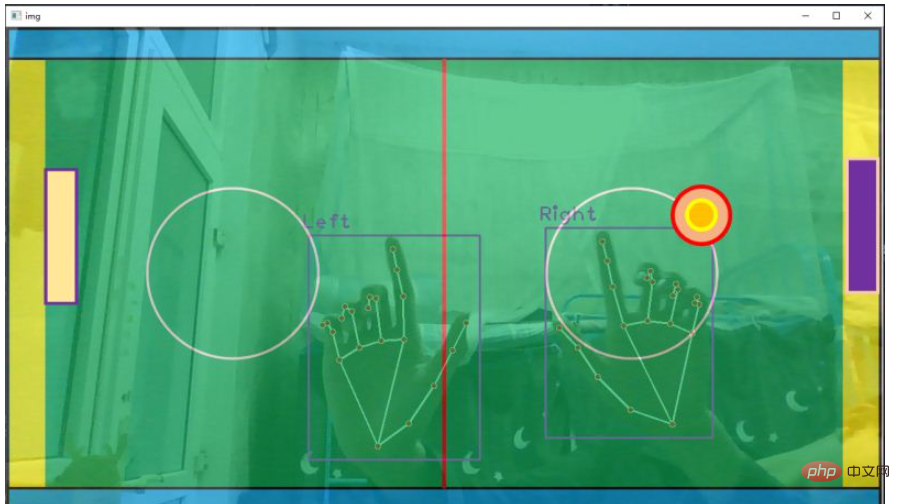
Bahagian ini terutamanya menyelesaikan dua tugasan raket kiri dan kanan masing-masing dengan tangan kiri dan kanan Kedua ialah menggerakkan bola ke arah tertentu.
(1) Kawal raket
hand['bbox'] 中包含了手部检测框的左上角坐标和检测框的宽高,使用手掌中心点的 y 坐标来控制球拍的上下移动。由于两个球拍的shape是相同的,因此只要获取一个球拍的高度 h2 即可。使用掌心中点 y 坐标控制球拍中点的 y1 坐标,公式为:y1 = (y + h) // 2 - h2 // 2
接着使用 cvzone.overlayPNG() 就可以将球拍图片覆盖在原图片的指定区域,其中坐标参数是指覆盖区域的左上角坐标。固定横坐标,只上下移动。
(2)球移动
首先要规定球的移动速度 speedx, speedy = 10, 10 代表球每一帧沿x轴正方向移动10个像素,沿y轴正方向移动10个像素,那么球的初始合速度方向是沿图片的正右下角移动
如果球碰撞到了球桌的上下边框,就反弹。speedy = -speedy。代表x方向每帧移动的步长不变,y方向每帧移动的方向反转,即入射角等于出射角。
在上述代码中补充
import cv2
import cvzone
import numpy as np
from cvzone.HandTrackingModule import HandDetector # 导入手部检测模块
#(1)捕获摄像头
cap = cv2.VideoCapture(0) # 0代表电脑自带的摄像头
cap.set(3, 1280) # 读入的图像的宽
cap.set(4, 720) # 读入的图像的高
#(2)文件配置
# 导入所有需要对图片文件
imgDesk = cv2.imread('games/desk.jpg') # 球桌的图片
imgBall = cv2.imread('games/ball.png', cv2.IMREAD_UNCHANGED) # 球的图片
imgBlock1 = cv2.imread('games/block1.png', cv2.IMREAD_UNCHANGED) # 球拍的图片
imgBlock2 = cv2.imread('games/block2.png', cv2.IMREAD_UNCHANGED) # 球拍的图片
# 调整球桌图片的size
imgDesk = cv2.resize(imgDesk, dsize=(1280,720))
# 调整球拍的size
imgBlock1 = cv2.resize(imgBlock1, dsize=(50,200))
imgBlock2 = cv2.resize(imgBlock2, dsize=(50,200))
#(3)参数设置
# 接收手部关键点识别的方法,最小手部检测模块置信度0.8,最多检测2只手
detector = HandDetector(detectionCon=0.8, maxHands=2)
# 球的默认位置
ballpos = [100, 100]
# 球的移动速度,每帧15个像素
speedx, speedy = 10, 10
#(4)处理帧图像
while True:
# 返回是否读取成功,以及读取后的帧图像
success, img = cap.read() # 每次执行读取一帧
# 图片翻转呈镜像关系,1代表左右翻转,0代表上下翻转
img = cv2.flip(img, flipCode=1)
# 手部关键点检测,返回每个只手的信息和绘制后的图像
hands, img = detector.findHands(img, flipType=False) # 上面翻转过了这里就不用翻转了
# 将球桌图片和视频帧图像融合在一起, 两张图的shape要相同
# 给出每张图片的融合权重, 亮度偏置为0,这样就变成了半透明的显示形式
img = cv2.addWeighted(img, 0.4, imgDesk, 0.6, 0)
#(5)处理手部关键点,如果检测到手了就进行下一步
if hands:
# 遍历每检测的2只手,获取每一只手的坐标
for hand in hands:
# 获取手部检测框的左上坐标xy,宽高wh
x, y, w, h = hand['bbox']
# 获取球拍的宽高
h2, w1 = imgBlock1.shape[0:2]
# 球拍的中心y坐标,随着掌心移动
y1 = (y + h) // 2 - h2 // 2
# 如果检测到了左手
if hand['type'] == 'Left':
# 左侧的球拍x轴固定,y坐标随左手掌间中点移动
img = cvzone.overlayPNG(img, imgBlock1, (55,y1))
# 如果检测到了右手
if hand['type'] == 'Right':
# 右侧的球拍x轴固定,y坐标随右手掌间中点移动
img = cvzone.overlayPNG(img, imgBlock2, (1280-55,y1))
#(6)改变球的位置
# 如果球的y坐标在超出了桌面的上或下边框范围,调整移动方向
if ballpos[1] >= 600 or ballpos[1] <= 50:
# y方向的速度调整为反方向,那么x方向和y方向的合速度方向调整了
speedy = -speedy
ballpos[0] = ballpos[0] + speedx # 调整球的x坐标
ballpos[1] = ballpos[1] + speedy # 调整球的y坐标
#(5)添加桌球的图片,将imgBall放在球桌img的指定坐标位置
img = cvzone.overlayPNG(img, imgBall, ballpos)
# 图像展示
cv2.imshow('img', img)
# 每帧滞留1ms后消失
k = cv2.waitKey(1)
# ESC键退出程序
if k & 0XFF==27:
break
# 释放视频资源
cap.release()
cv2.destroyAllWindows()效果图如下:
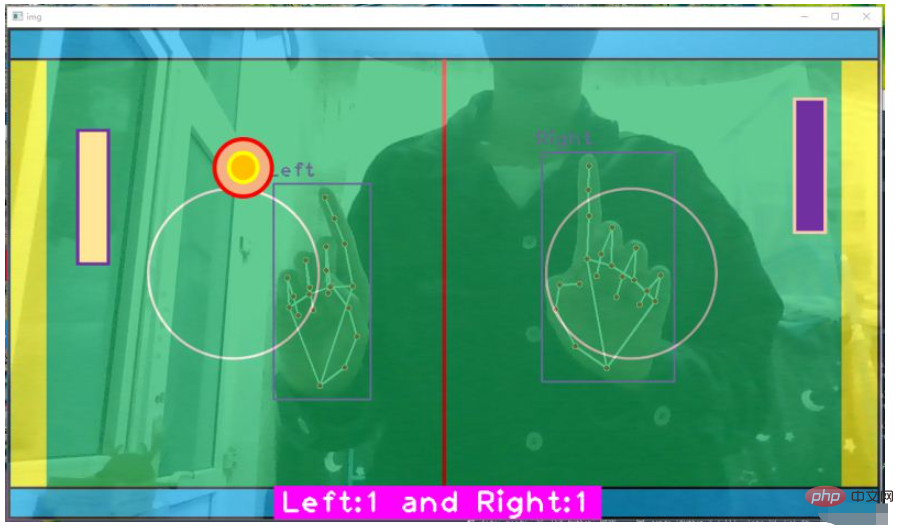
这一部分主要完成三项工作,第一是球拍击打到球,球需要反弹;第二是如果球进入黄色区域,游戏结束;第三是左右侧击球得分计数器。
(1)球拍击球
看到代码中的第(5)步,ballpos 代表球的左上角坐标(x,y),100 < ballpos[0] < 100+w1 代表球到了球拍横坐标区域范围内部了,y1 < ballpos[1] < y1+h2 代表球的y坐标在球拍y坐标内部,这时表明击球成功,speedx = -speedx 只改变沿x轴的速度方向,不改变沿y轴的速度方向。
(2)球进黄区,游戏结束
if ballpos[0] < 50 or ballpos[0] > 1150,如果球图片的左上坐标的 x 坐标,在黄区边缘,整个程序退出。当然也可以做一个游戏结束界面,我之前的博文里也有介绍,我偷个懒不写了。
(3)计数器
首先定义个变量初始化记录左右侧的击球次数 score = [0, 0],如果有一侧的球拍击中球,那么对应该侧计数加一。
上面代码是掌心控制球拍,这里改成食指指尖控制球拍中点移动。
import cv2
import cvzone
from cvzone.HandTrackingModule import HandDetector # 导入手部检测模块
#(1)捕获摄像头
cap = cv2.VideoCapture(0) # 0代表电脑自带的摄像头
cap.set(3, 1280) # 读入的图像的宽
cap.set(4, 720) # 读入的图像的高
#(2)文件配置
# 导入所有需要对图片文件
imgDesk = cv2.imread('games/desk.jpg') # 球桌的图片
imgBall = cv2.imread('games/ball.png', cv2.IMREAD_UNCHANGED) # 球的图片
imgBlock1 = cv2.imread('games/block1.png', cv2.IMREAD_UNCHANGED) # 球拍的图片
imgBlock2 = cv2.imread('games/block2.png', cv2.IMREAD_UNCHANGED) # 球拍的图片
# 调整球桌图片的size
imgDesk = cv2.resize(imgDesk, dsize=(1280,720))
# 调整球拍的size
imgBlock1 = cv2.resize(imgBlock1, dsize=(50,200))
imgBlock2 = cv2.resize(imgBlock2, dsize=(50,200))
#(3)参数设置
# 接收手部关键点识别的方法,最小手部检测模块置信度0.8,最多检测2只手
detector = HandDetector(detectionCon=0.8, maxHands=2)
# 球的默认位置
ballpos = [100, 100]
# 球的移动速度,每帧15个像素
speedx, speedy = 10, 10
# 记录是否游戏结束
gameover = False
# 记录左右的击球数
score = [0, 0]
#(4)处理帧图像
while True:
# 返回是否读取成功,以及读取后的帧图像
success, img = cap.read() # 每次执行读取一帧
# 图片翻转呈镜像关系,1代表左右翻转,0代表上下翻转
img = cv2.flip(img, flipCode=1)
# 手部关键点检测,返回每个只手的信息和绘制后的图像
hands, img = detector.findHands(img, flipType=False) # 上面翻转过了这里就不用翻转了
# 将球桌图片和视频帧图像融合在一起, 两张图的shape要相同
# 给出每张图片的融合权重, 亮度偏置为0,这样就变成了半透明的显示形式
img = cv2.addWeighted(img, 0.4, imgDesk, 0.6, 0)
#(5)处理手部关键点,如果检测到手了就进行下一步
if hands:
# 遍历每检测的2只手,获取每一只手的坐标
for hand in hands:
# 获取食指坐标(x,y,z)
x, y, z = hand['lmList'][8]
# 获取球拍的宽高
h2, w1 = imgBlock1.shape[0:2]
# 球拍的中心y坐标,随着掌心移动
y1 = y - h2 // 2
# 如果检测到了左手
if hand['type'] == 'Left':
# 左侧的球拍x轴固定,y坐标随左手掌间中点移动
img = cvzone.overlayPNG(img, imgBlock1, (100,y1))
# 检查球是否被左球拍击中, 球的xy坐标是否在球拍xy坐标附近
if 100 < ballpos[0] < 100+w1 and y1 < ballpos[1] < y1+h2:
# 满足条件代表球拍击中了,改变球的移动方向
speedx = -speedx # x方向设为反方向
# 得分加一
score[0] += 1
# 如果检测到了右手
if hand['type'] == 'Right':
# 右侧的球拍x轴固定,y坐标随右手掌间中点移动
img = cvzone.overlayPNG(img, imgBlock2, (1150,y1))
# 检查球是否被右球拍击中
if 1050 < ballpos[0] < 1050+w1 and y1 < ballpos[1] < y1+h2:
# 满足条件代表球拍击中了,改变球的移动方向
speedx = -speedx # x方向设为反方向
# 得分加一
score[1] += 1
#(6)检查球是否没接到,那么游戏结束
if ballpos[0] < 50 or ballpos[0] > 1150:
gameover = True
# 游戏结束,画面就不动了
if gameover is True:
break
# 游戏没结束就接下去执行
else:
#(7)调整球的坐标
# 如果球的y坐标在超出了桌面的上或下边框范围,调整移动方向
if ballpos[1] >= 600 or ballpos[1] <= 50:
# y方向的速度调整为反方向,那么x方向和y方向的合速度方向调整了
speedy = -speedy
# 每一整都调整xy坐标
ballpos[0] = ballpos[0] + speedx # 调整球的x坐标
ballpos[1] = ballpos[1] + speedy # 调整球的y坐标
#(8)添加桌球的图片,将imgBall放在球桌img的指定坐标位置
img = cvzone.overlayPNG(img, imgBall, ballpos)
#(9)显示记分板
cvzone.putTextRect(img, f'Left:{score[0]} and Right:{score[1]}', (400,710))
#(10)图像展示
cv2.imshow('img', img)
# 每帧滞留1ms后消失
k = cv2.waitKey(1)
# ESC键退出程序
if k & 0XFF==27:
break
# 释放视频资源
cap.release()
cv2.destroyAllWindows()效果图如下:
Atas ialah kandungan terperinci Cara membuat permainan visual hoki meja menggunakan Python. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!
















![[Web front-end] Permulaan pantas Node.js](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



