
 Peranti teknologi
AI
Rangka kerja pengesanan sasaran YOLOv6 yang pantas dan tepat telah menjadi sumber terbuka
Peranti teknologi
AI
Rangka kerja pengesanan sasaran YOLOv6 yang pantas dan tepat telah menjadi sumber terbuka
Rangka kerja pengesanan sasaran YOLOv6 yang pantas dan tepat telah menjadi sumber terbuka

Pengarang: Chu Yi, Kai Heng, dll.
Baru-baru ini, Jabatan Perisikan Visual Meituan telah membangunkan YOLOv6, rangka kerja pengesanan sasaran khusus untuk aplikasi industri, yang boleh memfokuskan pada ketepatan pengesanan dan kecekapan penaakulan. Semasa proses penyelidikan dan pembangunan, Jabatan Perisikan Visual terus meneroka dan mengoptimumkan, sambil melukis beberapa perkembangan termaju dan hasil penyelidikan saintifik daripada akademia dan industri. Keputusan percubaan pada COCO, set data pengesanan sasaran yang berwibawa, menunjukkan bahawa YOLOv6 mengatasi algoritma lain yang mempunyai saiz yang sama dari segi ketepatan dan kelajuan pengesanan Ia juga menyokong penggunaan pelbagai platform yang berbeza, sangat memudahkan kerja penyesuaian semasa penggunaan projek. . Ini adalah sumber terbuka, berharap dapat membantu lebih ramai pelajar.
1. Gambaran Keseluruhan
YOLOv6 ialah rangka kerja pengesanan sasaran yang dibangunkan oleh Jabatan Perisikan Visual Meituan dan dikhususkan untuk aplikasi industri. Rangka kerja ini memfokuskan pada ketepatan pengesanan dan kecekapan inferens Antara model saiz yang biasa digunakan dalam industri: YOLOv6-nano mempunyai ketepatan 35.0% AP pada COCO dan kelajuan inferens pada T4. 1242 FPS; YOLOv6-s boleh mencapai ketepatan 43.1% AP pada COCO dan kelajuan inferens 520 FPS pada T4. Dari segi penggunaan, YOLOv6 menyokong penggunaan platform berbeza seperti GPU (TensorRT), CPU (OPENVINO), ARM (MNN, TNN, NCNN) , yang sangat Memudahkan kerja penyesuaian semasa penggunaan projek. Pada masa ini, projek itu telah menjadi sumber terbuka kepada Github, portal: YOLOv6. Rakan-rakan yang memerlukan dialu-alukan ke Star untuk mengumpulnya dan mengaksesnya pada bila-bila masa.
Rangka kerja baharu yang ketepatan dan kelajuannya jauh melebihi YOLOv5 dan YOLOX
Pengesanan objek, sebagai teknologi asas dalam bidang penglihatan komputer, telah digunakan secara meluas dalam industri , antaranya algoritma siri YOLO secara beransur-ansur menjadi rangka kerja pilihan untuk kebanyakan aplikasi perindustrian kerana prestasi komprehensif yang baik. Setakat ini, industri telah memperoleh banyak rangka kerja pengesanan YOLO, antaranya YOLOv5[1], YOLOX[2] dan PP-YOLOE[3] ialah prestasi yang paling mewakili, tetapi dalam penggunaan sebenar, kami mendapati bahawa rangka kerja di atas masih mempunyai banyak ruang untuk penambahbaikan dari segi kelajuan dan ketepatan. Berdasarkan ini, kami membangunkan rangka kerja pengesanan sasaran baharu - YOLOv6 dengan mengkaji dan menggunakan teknologi termaju sedia ada dalam industri. Rangka kerja ini menyokong rangkaian penuh keperluan aplikasi industri seperti latihan model, inferens dan penggunaan berbilang platform, dan telah membuat beberapa penambahbaikan dan pengoptimuman pada peringkat algoritma seperti struktur rangkaian dan strategi latihan Pada set data COCO, YOLOv6 mempunyai ketepatan dan kelajuan melebihi algoritma lain yang mempunyai saiz yang sama, hasil yang berkaitan ditunjukkan dalam Rajah 1 di bawah:
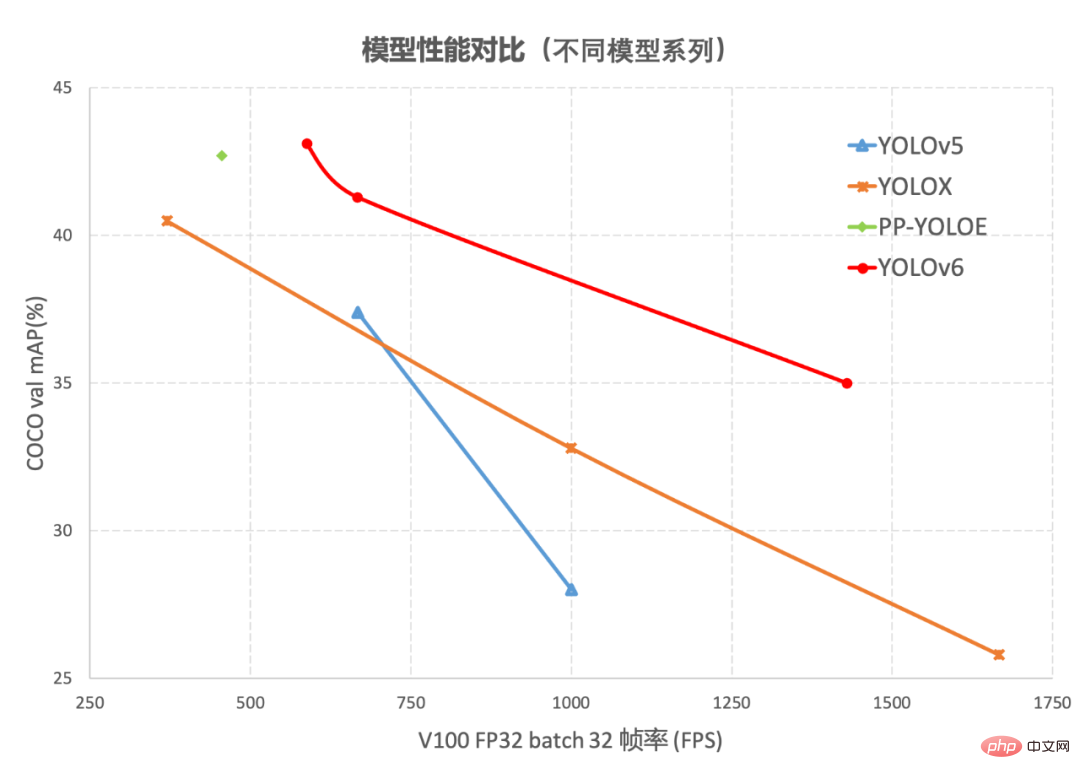
Rajah 1 -1 Prestasi model YOLOv6 pelbagai saiz dan model lain Perbandingan
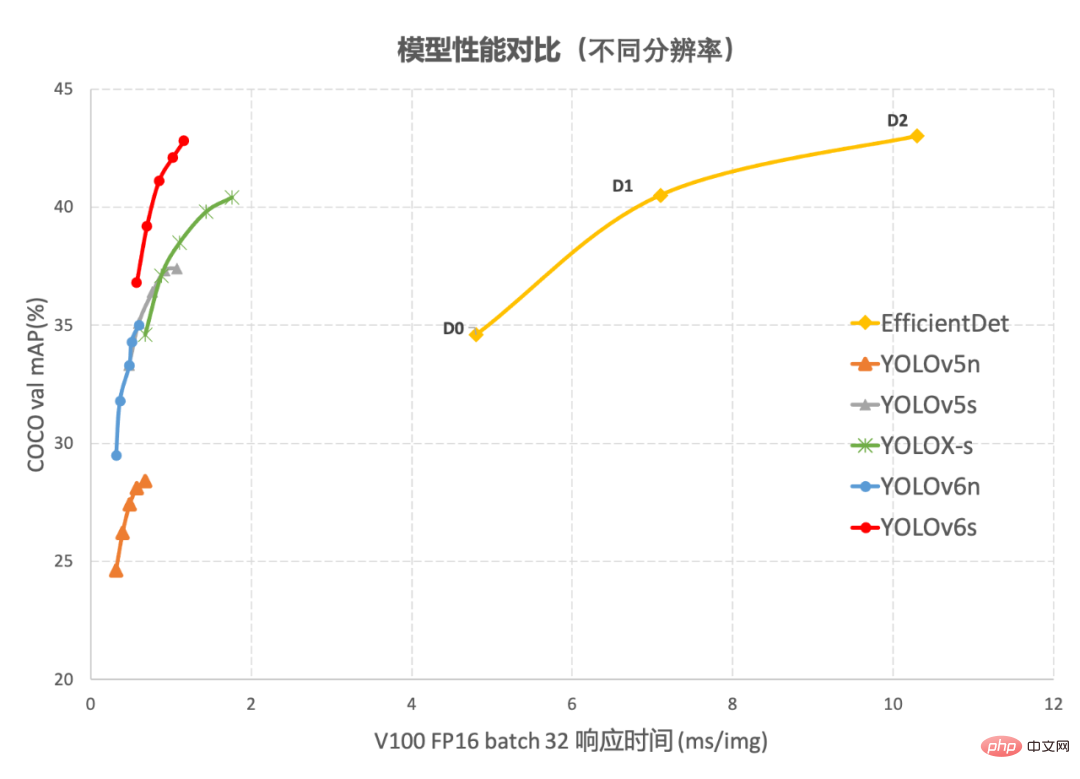
Rajah 1-2 Perbandingan prestasi antara YOLOv6 dan model lain pada resolusi yang berbezaRajah 1-1 menunjukkan perbandingan prestasi setiap algoritma pengesanan di bawah rangkaian saiz yang berbeza masing-masing mewakili algoritma pengesanan di bawah yang berbeza prestasi model rangkaian saiz (s /tiny/nano), seperti yang dapat dilihat daripada rajah, YOLOv6 mengatasi algoritma siri YOLO lain yang mempunyai saiz yang sama dari segi ketepatan dan kelajuan. Rajah 1-2 menunjukkan perbandingan prestasi setiap model rangkaian pengesanan apabila resolusi input berubah Titik pada lengkung dari kiri ke kanan mewakili apabila resolusi imej meningkat secara berurutan (384/448/512/576 /. 640) Prestasi model ini, seperti yang dapat dilihat dari rajah, YOLOv6 masih mengekalkan kelebihan prestasi yang besar pada resolusi yang berbeza.
2 Pengenalan kepada teknologi utama YOLOv6
YOLOv6 telah membuat banyak peningkatan terutamanya dalam strategi Tulang Belakang, Leher, Kepala dan latihan:
- Kami telah mereka bentuk Tulang Belakang dan Leher yang lebih cekap: diilhamkan oleh idea reka bentuk rangkaian neural yang sedar perkakasan, kami mereka bentuk reka bentuk yang boleh diparameter semula dan lebih cekap berdasarkan gaya RepVGG[4] Tulang Belakang EfficientRep dan Leher Rep-PAN.
- Efficient Decoupled Head dioptimumkan dan direka bentuk untuk menjadi lebih ringkas dan berkesan, yang seterusnya mengurangkan kelewatan overhed tambahan yang disebabkan oleh kepala decoupled am sambil mengekalkan ketepatan.
- Dari segi strategi latihan, kami mengguna pakai paradigma bebas anchor tanpa anchor, ditambah dengan SimOTA[2] strategi peruntukan label dan SIoU[ 9] Kehilangan regresi kotak sempadan untuk meningkatkan lagi ketepatan pengesanan.
2.1 Reka bentuk rangkaian tulang belakang mesra perkakasan
Tulang Belakang dan Leher yang digunakan oleh YOLOv5/YOLOX kedua-duanya dibina pada CSPNet[5] , menggunakan pendekatan berbilang cawangan dan struktur sisa. Untuk perkakasan seperti GPU, struktur ini akan meningkatkan kependaman pada tahap tertentu dan mengurangkan penggunaan lebar jalur memori. Rajah 2 di bawah ialah pengenalan kepada Model Roofline[8] dalam bidang seni bina komputer, menunjukkan hubungan antara kuasa pengkomputeran dan lebar jalur memori dalam perkakasan.
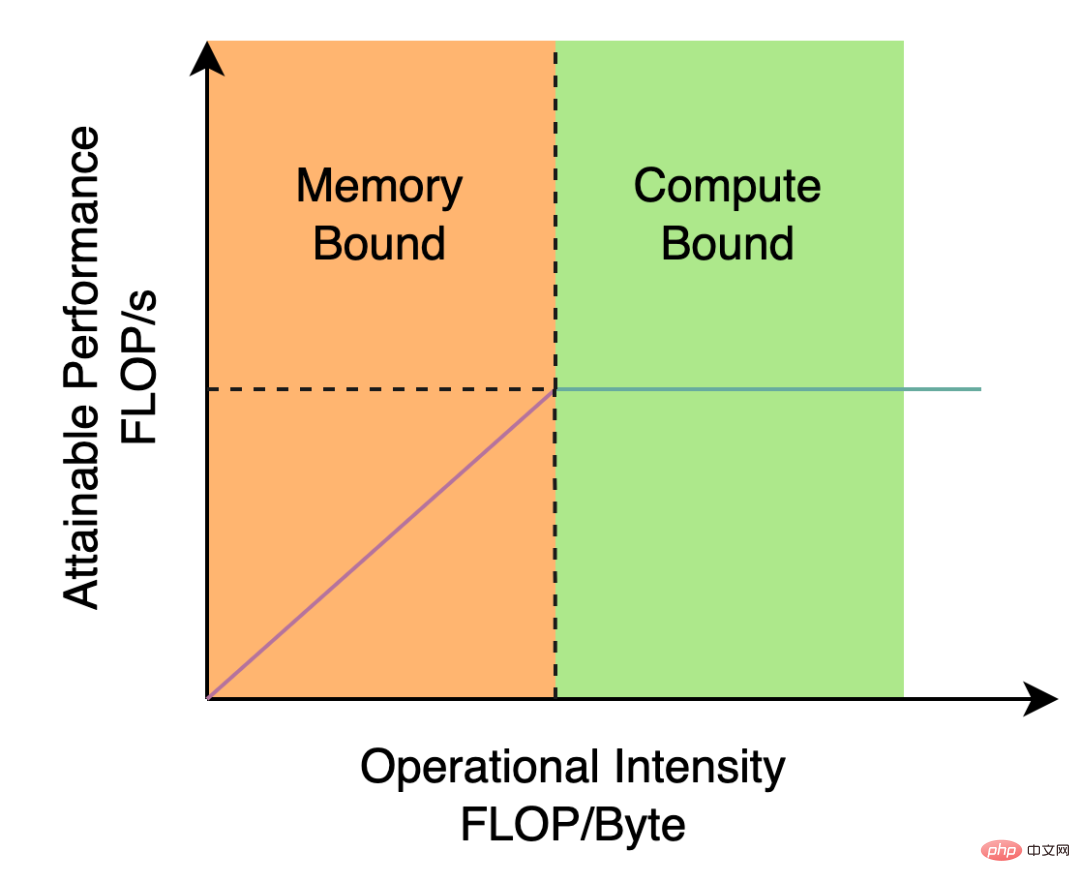
Rajah 2 Gambarajah pengenalan Model Garis Bumbung
Jadi, kami berdasarkan idea perkakasan -reka bentuk rangkaian neural sedar, Tulang Belakang dan Leher telah direka bentuk semula dan dioptimumkan. Idea ini adalah berdasarkan ciri perkakasan dan ciri rangka kerja inferens/rangka kompilasi Ia mengambil perkakasan dan struktur mesra kompilasi sebagai prinsip reka bentuk Apabila membina rangkaian, ia secara menyeluruh mempertimbangkan kuasa pengkomputeran perkakasan, lebar jalur memori , ciri pengoptimuman kompilasi, keupayaan perwakilan rangkaian, dsb., dan kemudian Dapatkan struktur rangkaian yang cepat dan baik. Untuk dua komponen pengesanan reka bentuk semula di atas, kami memanggilnya EfficientRep Backbone dan Rep-PAN Neck masing-masing dalam YOLOv6 Sumbangan utama mereka ialah:
- Pengenalan RepVGG[4. ] struktur gaya.
- Tulang Belakang dan Leher direka bentuk semula berdasarkan pemikiran sedar perkakasan.
RepVGG[4] Struktur gaya ialah topologi berbilang cawangan semasa latihan, yang boleh digabungkan secara bersamaan menjadi 3x3 tunggal semasa penggunaan sebenar A boleh reparameterizable struktur lilitan (Proses pelakuran ditunjukkan dalam Rajah 3 di bawah). Melalui struktur lilitan 3x3 yang digabungkan, anda boleh menggunakan kuasa pengkomputeran perkakasan intensif pengiraan dengan berkesan (seperti GPU), dan anda juga boleh mendapatkan bantuan daripada rangka kerja kompilasi NVIDIA cuDNN dan Intel MKL yang sangat dioptimumkan pada GPU/ CPU.
Eksperimen menunjukkan bahawa melalui strategi di atas, YOLOv6 mengurangkan kelewatan perkakasan dan meningkatkan ketepatan algoritma dengan ketara, menjadikan rangkaian pengesanan lebih pantas dan kukuh. Mengambil model saiz nano sebagai contoh, berbanding dengan struktur rangkaian yang digunakan oleh YOLOv5-nano, kaedah ini meningkatkan kelajuan sebanyak 21% dan meningkatkan ketepatan sebanyak 3.6% AP.
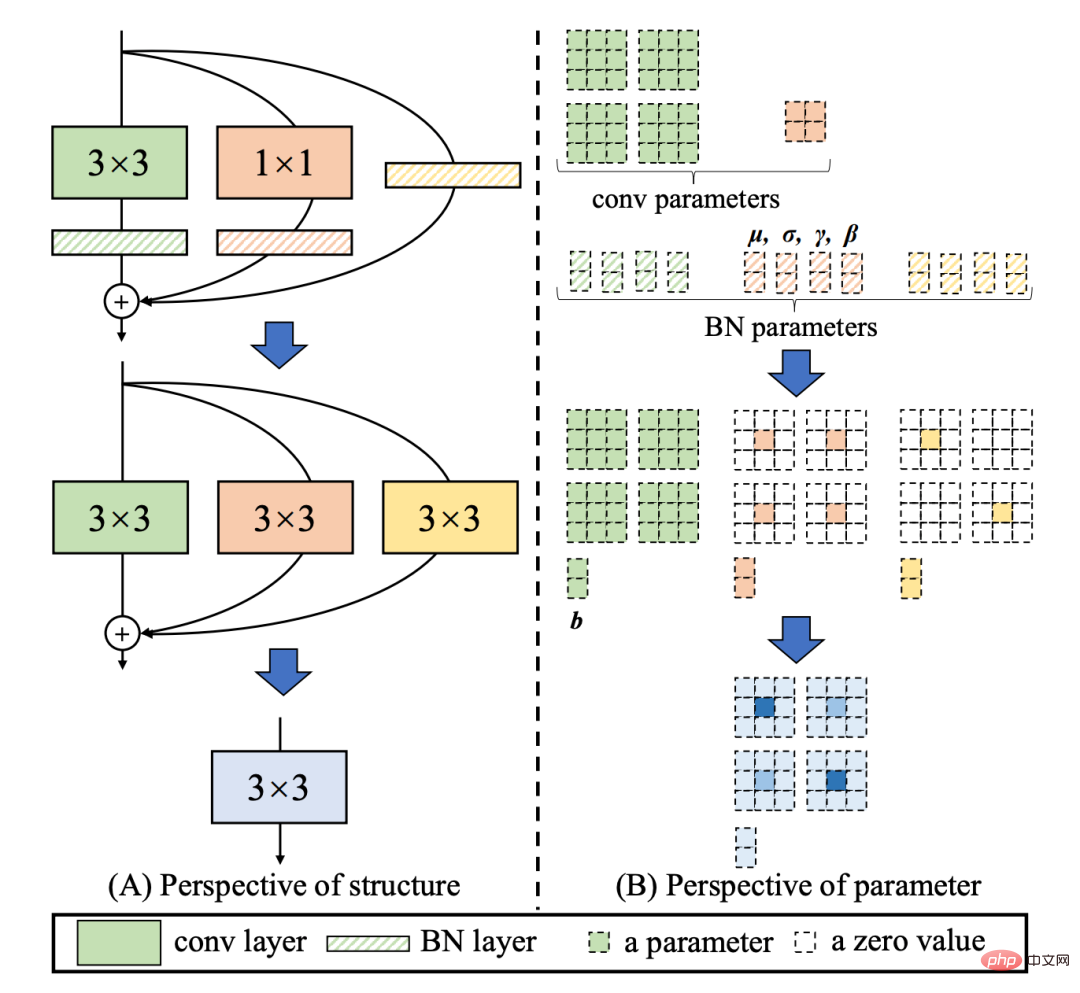
Rajah 3 Proses gabungan operator Rep [4]
EfficientRep Backbone: Dari segi reka bentuk Backbone, kami mereka bentuk Backbone yang cekap berdasarkan operator Rep di atas. Berbanding dengan CSP-Backbone yang digunakan dalam YOLOv5, Backbone ini boleh menggunakan kuasa pengkomputeran perkakasan (seperti GPU) dengan cekap dan juga mempunyai keupayaan perwakilan yang kukuh.
Rajah 4 di bawah ialah gambar rajah struktur reka bentuk khusus EfficientRep Backbone Kami menggantikan lapisan Conv biasa dengan stride=2 dalam Backbone dengan lapisan RepConv dengan stride=2. Pada masa yang sama, CSP-Block asal direka bentuk semula menjadi RepBlock, di mana RepConv RepBlock pertama akan mengubah dan menjajarkan dimensi saluran. Selain itu, kami mengoptimumkan SPPF asal menjadi SimSPPF yang lebih cekap.
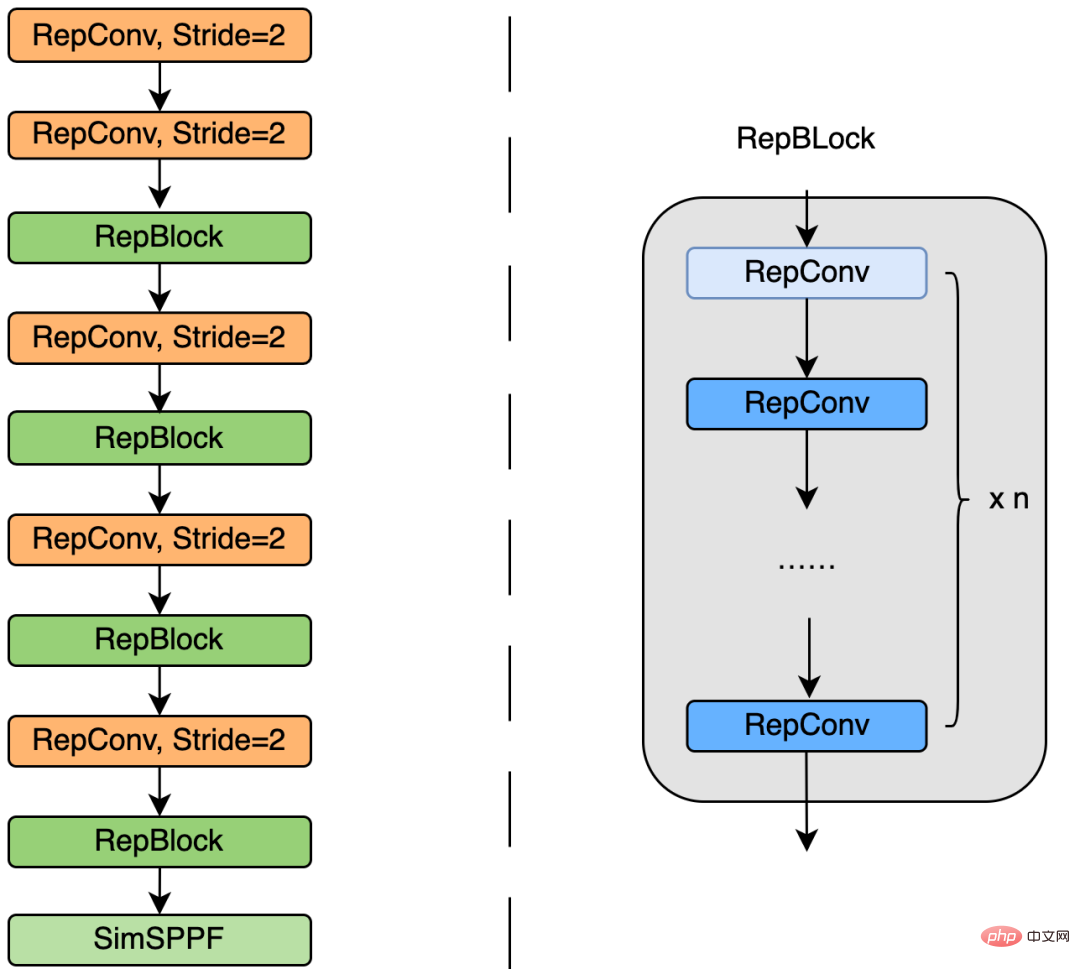
Rajah 4 Rajah struktur EfficientRep Tulang Belakang
Rep-PAN: Dalam segi reka bentuk Leher, untuk menjadikan alasannya pada perkakasan lebih cekap dan mencapai keseimbangan yang lebih baik antara ketepatan dan kelajuan, kami mereka bentuk struktur rangkaian gabungan ciri yang lebih berkesan untuk YOLOv6 berdasarkan idea reka bentuk rangkaian neural yang sedar perkakasan.
Rep-PAN adalah berdasarkan topologi PAN[6], menggantikan CSP-Block yang digunakan dalam YOLOv5 dengan RepBlock, dan pada masa yang sama melaraskan operator dalam Neck keseluruhan, dengan tujuan Walaupun mencapai inferens yang cekap pada perkakasan, ia mengekalkan keupayaan gabungan ciri berbilang skala yang baik (Rajah struktur Rep-PAN ditunjukkan dalam Rajah 5 di bawah).
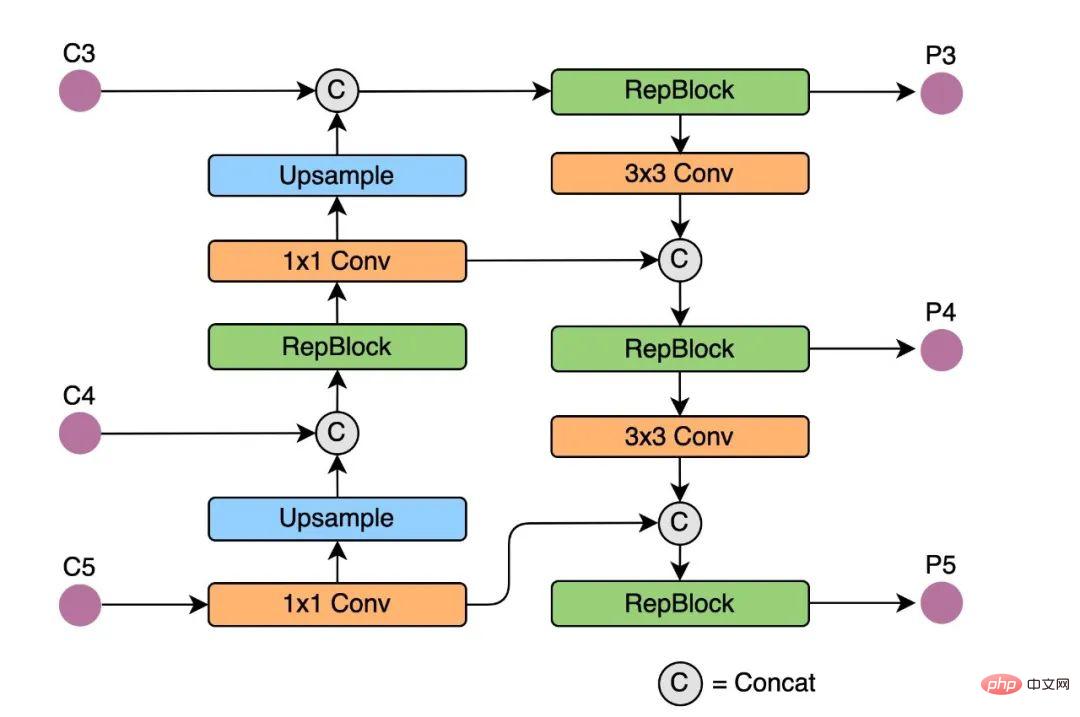
Rajah 5 Gambarajah struktur Rep-PAN
2.2 Decoupled Head yang lebih ringkas dan cekap
Dalam YOLOv6, kami menggunakan struktur kepala pengesan yang dipisahkan (Kepala Terpisah) dan memperkemas reka bentuknya. Ketua pengesanan YOLOv5 asal dilaksanakan dengan menggabungkan dan berkongsi cawangan klasifikasi dan regresi, manakala ketua pengesanan YOLOX memisahkan cawangan klasifikasi dan regresi, dan menambah dua lapisan konvolusi 3x3 tambahan Walaupun ketepatan pengesanan dipertingkatkan, tetapi rangkaian kelewatan meningkat pada tahap tertentu.
Oleh itu, kami memperkemas reka bentuk kepala penyahgandingan, dengan mengambil kira keseimbangan antara keupayaan perwakilan pengendali yang berkaitan dan overhed pengiraan perkakasan, dan mereka bentuk semula menggunakan Hibrid Strategi saluran Struktur kepala penyahgandingan yang lebih cekap dibangunkan, yang mengurangkan kelewatan sambil mengekalkan ketepatan, dan mengurangkan overhed kelewatan tambahan yang disebabkan oleh konvolusi 3x3 dalam kepala penyahgandingan. Dengan menjalankan eksperimen ablasi pada model bersaiz nano dan membandingkan struktur kepala penyahgandingan dengan bilangan saluran yang sama, ketepatan ditingkatkan sebanyak 0.2% AP dan kelajuan meningkat sebanyak 6.8%.
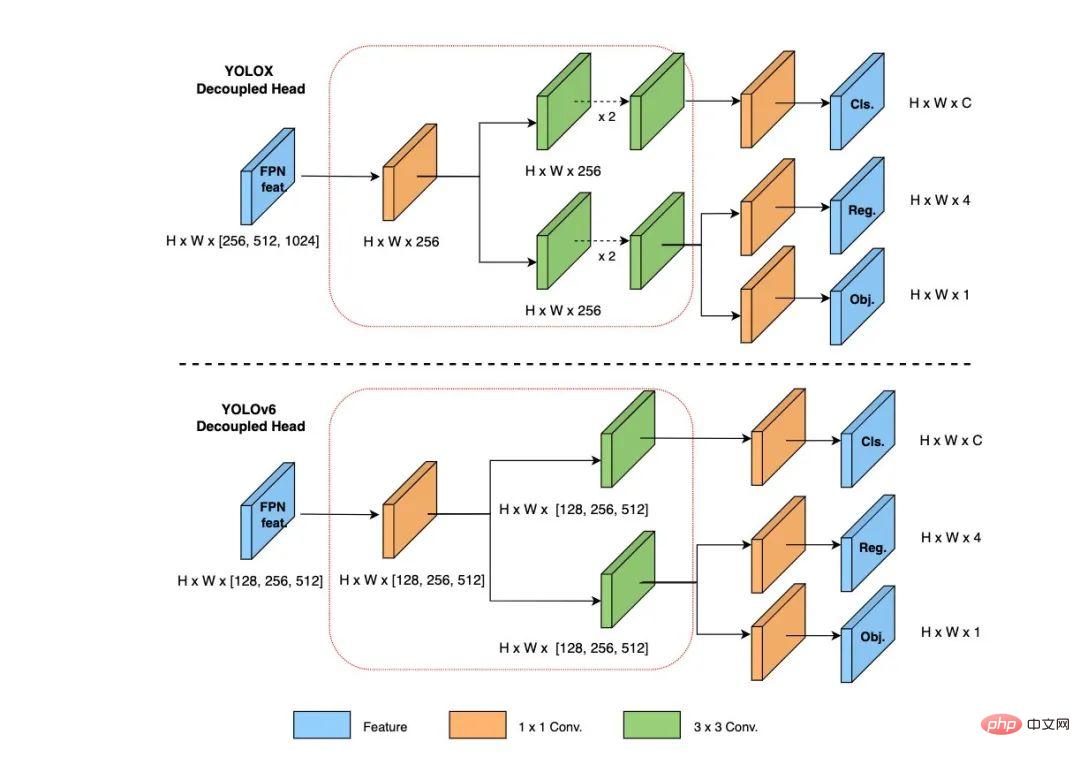
Rajah 6 Gambar rajah struktur Kepala Decoupled Cekap
2.3 Strategi latihan yang lebih berkesan
Untuk meningkatkan lagi ketepatan pengesanan, kami menggunakan kemajuan penyelidikan lanjutan rangka kerja pengesanan lain dalam akademia dan industri: Paradigma tanpa sauh tanpa sauh, strategi peruntukan label SimOTA dan kehilangan regresi kotak sempadan SIoU.
Paradigma tanpa sauh tanpa sauh
YOLOv6 menggunakan kaedah pengesanan Tanpa Sauh yang lebih ringkas. Memandangkan pengesan berasaskan Anchor perlu melakukan analisis kelompok sebelum latihan untuk menentukan set Anchor yang optimum, ini akan meningkatkan kerumitan pengesan ke tahap tertentu pada masa yang sama, dalam beberapa aplikasi tepi, sejumlah besar hasil pengesanan perlu diangkut antara langkah perkakasan juga akan membawa kelewatan tambahan. Paradigma bebas anchor tanpa anchor telah digunakan secara meluas sejak beberapa tahun kebelakangan ini kerana keupayaan generalisasi yang kukuh dan logik penyahkodan yang lebih mudah. Selepas penyelidikan eksperimen tentang Tanpa Anchor, kami mendapati bahawa berbanding dengan kelewatan tambahan yang disebabkan oleh kerumitan pengesan berasaskan Anchor, pengesan tanpa Anchor mempunyai peningkatan kelajuan sebanyak 51%.
Strategi peruntukan label SimOTA
Untuk mendapatkan lebih banyak sampel positif berkualiti tinggi, YOLOv6 memperkenalkan SimOTA [4]Algoritma memperuntukkan sampel positif secara dinamik untuk meningkatkan lagi ketepatan pengesanan. Strategi peruntukan label YOLOv5 adalah berdasarkan padanan Bentuk, dan meningkatkan bilangan sampel positif melalui strategi pemadanan silang grid, dengan itu menjadikan rangkaian bertumpu dengan cepat Walau bagaimanapun, kaedah ini adalah kaedah peruntukan statik dan tidak akan diselaraskan dengan proses latihan rangkaian.
Dalam beberapa tahun kebelakangan ini, banyak kaedah berdasarkan penetapan label dinamik telah muncul Kaedah sedemikian akan memperuntukkan sampel positif berdasarkan output rangkaian semasa proses latihan, dengan itu menghasilkan lebih banyak sampel Positif berkualiti tinggi. , seterusnya menggalakkan pengoptimuman rangkaian ke hadapan. Contohnya, OTA[7] memodelkan padanan sampel sebagai masalah penghantaran yang optimum dan memperoleh strategi pemadanan sampel terbaik di bawah maklumat global untuk meningkatkan ketepatan Walau bagaimanapun, OTA menggunakan algoritma Sinkhorn-Knopp, menghasilkan latihan Masa dipanjangkan, dan algoritma SimOTA[4] menggunakan strategi anggaran Top-K untuk mendapatkan padanan terbaik sampel, yang sangat mempercepatkan latihan. Oleh itu, YOLOv6 mengguna pakai strategi peruntukan dinamik SimOTA dan menggabungkannya dengan paradigma bebas sauh untuk meningkatkan ketepatan pengesanan purata sebanyak 1.3% AP pada model saiz nano.
Kehilangan regresi kotak terikat SIoU
Untuk meningkatkan lagi ketepatan regresi, YOLOv6 menggunakan SIoU [9 ] Fungsi kehilangan regresi kotak sempadan untuk menyelia pembelajaran rangkaian. Latihan rangkaian pengesanan sasaran secara amnya memerlukan definisi sekurang-kurangnya dua fungsi kehilangan: kehilangan klasifikasi dan kehilangan regresi kotak sempadan, dan definisi fungsi kehilangan selalunya memberi kesan yang lebih besar pada ketepatan pengesanan dan kelajuan latihan.
Dalam beberapa tahun kebelakangan ini, kerugian regresi kotak terikat yang biasa digunakan termasuk IoU, GIoU, CIoU, kehilangan DIoU, dll. Fungsi kehilangan ini mempertimbangkan faktor seperti tahap pertindihan antara bingkai ramalan dan bingkai sasaran, titik tengah jarak, nisbah aspek, dsb. Untuk mengukur jurang antara kedua-duanya, dengan itu membimbing rangkaian untuk meminimumkan kerugian untuk meningkatkan ketepatan regresi, tetapi kaedah ini tidak mengambil kira padanan arah antara kotak ramalan dan kotak sasaran. Fungsi kehilangan SIoU mentakrifkan semula kehilangan jarak dengan memperkenalkan sudut vektor antara regresi yang diperlukan, dengan berkesan mengurangkan tahap kebebasan regresi, mempercepatkan penumpuan rangkaian dan meningkatkan lagi ketepatan regresi. Dengan menggunakan kehilangan SIoU untuk percubaan pada YOLOv6s, berbanding dengan kehilangan CIoU, purata ketepatan pengesanan meningkat sebanyak 0.3% AP.
3. Keputusan eksperimen
Selepas strategi pengoptimuman dan penambahbaikan di atas, YOLOv6 telah mencapai prestasi cemerlang dalam berbilang model saiz yang berbeza. Jadual 1 di bawah menunjukkan keputusan eksperimen ablasi YOLOv6-nano Daripada keputusan eksperimen, kita dapat melihat bahawa rangkaian pengesanan rekaan sendiri kami telah membawa keuntungan besar dalam kedua-dua ketepatan dan kelajuan. 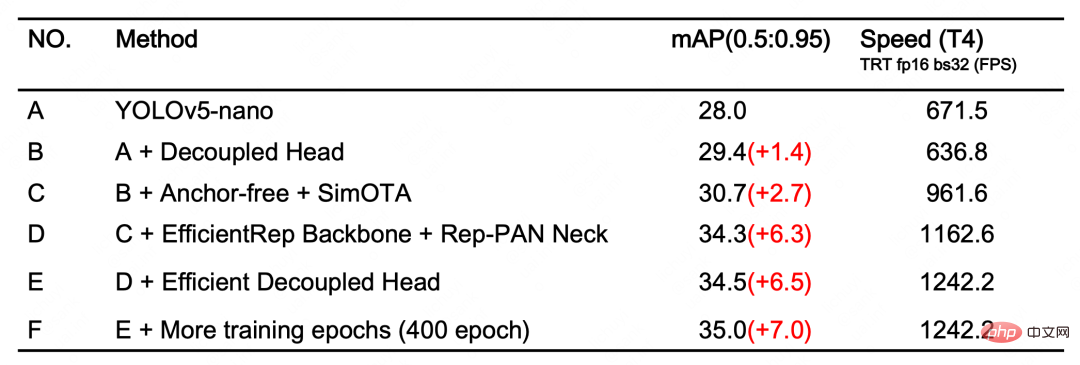
Jadual 1 keputusan percubaan ablasi YOLOv6-nano Jadual 2 di bawah menunjukkan keputusan percubaan YOLOv6 berbanding dengan algoritma siri YOLO arus perdana yang lain. Seperti yang dapat dilihat daripada jadual:
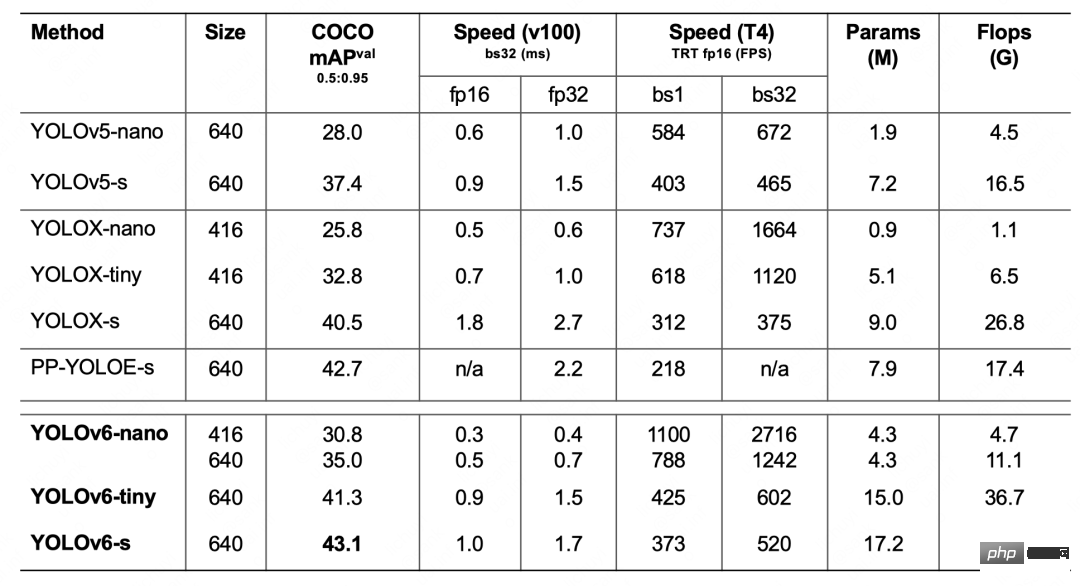
Jadual 2 Perbandingan prestasi model YOLOv6 pelbagai saiz dengan model lain
- YOLOv6-nano mencapai ketepatan 35.0% AP pada COCO val Pada masa yang sama, menggunakan TRT FP16 batchsize=32 untuk inferens pada T4, ia boleh mencapai prestasi 1242FPS -nano, ketepatan meningkat sebanyak 7% AP , kelajuan meningkat sebanyak 85%.
- YOLOv6-tiny mencapai ketepatan 41.3% AP pada COCO val Pada masa yang sama, menggunakan TRT FP16 batchsize=32 pada T4 untuk inferens, ia boleh mencapai prestasi 602FPS, berbanding YOLOv5 -s meningkatkan ketepatan sebanyak 3.9% AP dan kelajuan sebanyak 29.4%.
- YOLOv6-s mencapai ketepatan 43.1% AP pada COCO val Pada masa yang sama, menggunakan TRT FP16 batchsize=32 untuk inferens pada T4, ia boleh mencapai prestasi 520FPS, berbanding dengan ketepatan YOLOX -s meningkat sebanyak 2.6% AP, dan kelajuan meningkat sebanyak 38.6% berbanding dengan PP-YOLOE-s, yang meningkatkan ketepatan sebanyak 0.4% AP, menggunakan TRT FP16 pada T4 untuk inferens satu kelompok, kelajuan meningkat sebanyak 71.3%.
4 Ringkasan dan Tinjauan
Artikel ini memperkenalkan pengoptimuman dan pengalaman praktikal Jabatan Perisikan Visual Meituan dalam rangka kerja pengesanan sasaran. , kami telah memikirkan dan mengoptimumkan strategi latihan, rangkaian tulang belakang, gabungan ciri berbilang skala, kepala pengesanan, dll. untuk rangka kerja siri YOLO, dan mereka bentuk rangka kerja pengesanan baharu-YOLOv6 Niat asal datang daripada menyelesaikan masalah sebenar yang dihadapi apabila melaksanakan soalan perindustrian.
Semasa membina rangka kerja YOLOv6, kami meneroka dan mengoptimumkan beberapa kaedah baharu, seperti EfficientRep Backbone, Rep-Neck dan Efficient Decoupled Head berdasarkan idea reka bentuk rangkaian neural yang sedar perkakasan. , dan juga menggunakan beberapa perkembangan termaju dan menghasilkan akademik dan industri, seperti kehilangan regresi tanpa Anchor, SimOTA dan SIoU. Keputusan percubaan pada set data COCO menunjukkan bahawa YOLOv6 adalah antara yang terbaik dari segi ketepatan dan kelajuan pengesanan.
Pada masa hadapan, kami akan terus membina dan menambah baik ekosistem YOLOv6 Kerja utama merangkumi aspek berikut:
- . Memperbaik rangkaian penuh model YOLOv6 , dan terus meningkatkan prestasi pengesanan.
- Reka bentuk model mesra perkakasan pada pelbagai platform perkakasan.
- Menyokong penyesuaian rantaian penuh seperti penggunaan platform ARM dan penyulingan kuantitatif.
- Kembangkan dan perkenalkan teknologi berkaitan secara lateral, seperti pembelajaran separa penyeliaan, penyeliaan sendiri, dsb.
- Terokai prestasi generalisasi YOLOv6 dalam senario perniagaan yang lebih tidak diketahui.
Atas ialah kandungan terperinci Rangka kerja pengesanan sasaran YOLOv6 yang pantas dan tepat telah menjadi sumber terbuka. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

AI Hentai Generator
Menjana ai hentai secara percuma.

Artikel Panas
Alat panas

Notepad++7.3.1
Editor kod yang mudah digunakan dan percuma

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

Hantar Studio 13.0.1
Persekitaran pembangunan bersepadu PHP yang berkuasa

Dreamweaver CS6
Alat pembangunan web visual

SublimeText3 versi Mac
Perisian penyuntingan kod peringkat Tuhan (SublimeText3)
Topik panas
 1377
1377
 52
52

 Sepuluh alat anotasi teks percuma sumber terbuka yang disyorkan
Mar 26, 2024 pm 08:20 PM
Sepuluh alat anotasi teks percuma sumber terbuka yang disyorkan
Mar 26, 2024 pm 08:20 PM
Anotasi teks ialah kerja label atau teg yang sepadan dengan kandungan tertentu dalam teks. Tujuan utamanya adalah untuk memberikan maklumat tambahan kepada teks untuk analisis dan pemprosesan yang lebih mendalam, terutamanya dalam bidang kecerdasan buatan. Anotasi teks adalah penting untuk tugas pembelajaran mesin yang diawasi dalam aplikasi kecerdasan buatan. Ia digunakan untuk melatih model AI untuk membantu memahami maklumat teks bahasa semula jadi dengan lebih tepat dan meningkatkan prestasi tugasan seperti klasifikasi teks, analisis sentimen dan terjemahan bahasa. Melalui anotasi teks, kami boleh mengajar model AI untuk mengenali entiti dalam teks, memahami konteks dan membuat ramalan yang tepat apabila data baharu yang serupa muncul. Artikel ini terutamanya mengesyorkan beberapa alat anotasi teks sumber terbuka yang lebih baik. 1.LabelStudiohttps://github.com/Hu
 15 alat anotasi imej percuma sumber terbuka disyorkan
Mar 28, 2024 pm 01:21 PM
15 alat anotasi imej percuma sumber terbuka disyorkan
Mar 28, 2024 pm 01:21 PM
Anotasi imej ialah proses mengaitkan label atau maklumat deskriptif dengan imej untuk memberi makna dan penjelasan yang lebih mendalam kepada kandungan imej. Proses ini penting untuk pembelajaran mesin, yang membantu melatih model penglihatan untuk mengenal pasti elemen individu dalam imej dengan lebih tepat. Dengan menambahkan anotasi pada imej, komputer boleh memahami semantik dan konteks di sebalik imej, dengan itu meningkatkan keupayaan untuk memahami dan menganalisis kandungan imej. Anotasi imej mempunyai pelbagai aplikasi, meliputi banyak bidang, seperti penglihatan komputer, pemprosesan bahasa semula jadi dan model penglihatan graf Ia mempunyai pelbagai aplikasi, seperti membantu kenderaan dalam mengenal pasti halangan di jalan raya, dan membantu dalam proses. pengesanan dan diagnosis penyakit melalui pengecaman imej perubatan. Artikel ini terutamanya mengesyorkan beberapa alat anotasi imej sumber terbuka dan percuma yang lebih baik. 1.Makesen
 Bagaimana untuk mendapatkan kaunter bawa pulang Meituan
Apr 08, 2024 pm 03:41 PM
Bagaimana untuk mendapatkan kaunter bawa pulang Meituan
Apr 08, 2024 pm 03:41 PM
1. Apabila kerani penghantaran memasukkan makanan ke dalam kabinet, dia akan memberitahu pelanggan untuk mengambil makanan melalui mesej teks, panggilan telefon atau mesej Meituan. 2. Pelanggan boleh mengimbas kod QR pada kabinet makanan melalui WeChat atau Meituan APP untuk memasuki applet kabinet makanan pintar. 3. Masukkan kod pikap atau gunakan fungsi "pembukaan kabinet satu klik" untuk membuka pintu kabinet dengan mudah dan mengeluarkan barang bawa pulang.
 Bagaimana untuk mendapatkan semula kata laluan pembayaran Meituan yang terlupa_Bagaimana untuk mendapatkan semula kata laluan pembayaran Meituan yang terlupa
Mar 28, 2024 pm 03:29 PM
Bagaimana untuk mendapatkan semula kata laluan pembayaran Meituan yang terlupa_Bagaimana untuk mendapatkan semula kata laluan pembayaran Meituan yang terlupa
Mar 28, 2024 pm 03:29 PM
1. Mula-mula, kami memasuki perisian Meituan, cari Tetapan pada halaman Menu Saya, dan klik untuk memasuki Tetapan. 2. Kemudian kami mencari tetapan pembayaran pada halaman tetapan dan klik untuk memasukkan tetapan pembayaran. 3. Masukkan pusat pembayaran, cari tetapan kata laluan pembayaran, dan klik untuk memasukkan tetapan kata laluan pembayaran. 4. Dalam halaman tetapan kata laluan pembayaran, cari pengambilan kata laluan pembayaran dan klik untuk memasukkan pilihan halaman. 5. Masukkan maklumat kata laluan pembayaran yang anda ingin dapatkan semula, klik Sahkan, dan anda boleh mendapatkan semula kata laluan pembayaran selepas lulus.
 Disyorkan: Projek pengesanan dan pengecaman muka sumber terbuka JS yang sangat baik
Apr 03, 2024 am 11:55 AM
Disyorkan: Projek pengesanan dan pengecaman muka sumber terbuka JS yang sangat baik
Apr 03, 2024 am 11:55 AM
Teknologi pengesanan dan pengecaman muka adalah teknologi yang agak matang dan digunakan secara meluas. Pada masa ini, bahasa aplikasi Internet yang paling banyak digunakan ialah JS Melaksanakan pengesanan muka dan pengecaman pada bahagian hadapan Web mempunyai kelebihan dan kekurangan berbanding dengan pengecaman muka bahagian belakang. Kelebihan termasuk mengurangkan interaksi rangkaian dan pengecaman masa nyata, yang sangat memendekkan masa menunggu pengguna dan meningkatkan pengalaman pengguna termasuk: terhad oleh saiz model, ketepatannya juga terhad. Bagaimana untuk menggunakan js untuk melaksanakan pengesanan muka di web? Untuk melaksanakan pengecaman muka di Web, anda perlu biasa dengan bahasa dan teknologi pengaturcaraan yang berkaitan, seperti JavaScript, HTML, CSS, WebRTC, dll. Pada masa yang sama, anda juga perlu menguasai visi komputer yang berkaitan dan teknologi kecerdasan buatan. Perlu diingat bahawa kerana reka bentuk bahagian Web
 Dokumen berbilang modal Alibaba 7B memahami model besar memenangi SOTA baharu
Apr 02, 2024 am 11:31 AM
Dokumen berbilang modal Alibaba 7B memahami model besar memenangi SOTA baharu
Apr 02, 2024 am 11:31 AM
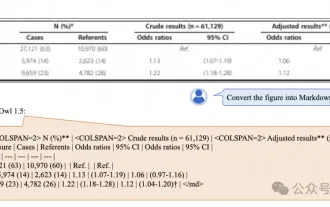
SOTA baharu untuk keupayaan memahami dokumen multimodal! Pasukan Alibaba mPLUG mengeluarkan kerja sumber terbuka terkini mPLUG-DocOwl1.5, yang mencadangkan satu siri penyelesaian untuk menangani empat cabaran utama pengecaman teks imej resolusi tinggi, pemahaman struktur dokumen am, arahan mengikut dan pengenalan pengetahuan luaran. Tanpa berlengah lagi, mari kita lihat kesannya dahulu. Pengecaman satu klik dan penukaran carta dengan struktur kompleks ke dalam format Markdown: Carta gaya berbeza tersedia: Pengecaman dan kedudukan teks yang lebih terperinci juga boleh dikendalikan dengan mudah: Penjelasan terperinci tentang pemahaman dokumen juga boleh diberikan: Anda tahu, "Pemahaman Dokumen " pada masa ini Senario penting untuk pelaksanaan model bahasa yang besar. Terdapat banyak produk di pasaran untuk membantu pembacaan dokumen. Sesetengah daripada mereka menggunakan sistem OCR untuk pengecaman teks dan bekerjasama dengan LLM untuk pemprosesan teks.
 Bagaimana untuk memadam ulasan pada Meituan Bagaimana untuk memadam ulasan
Mar 12, 2024 pm 07:31 PM
Bagaimana untuk memadam ulasan pada Meituan Bagaimana untuk memadam ulasan
Mar 12, 2024 pm 07:31 PM
Apabila kami menggunakan platform ini, terdapat juga ulasan mengenai pelbagai aspek makanan dan penggunaan Beberapa kaedah operasi juga sangat mudah dan dinilai oleh kami sendiri, bagaimanapun, kadang-kadang kami mungkin terpaksa memadam sendiri penilaian yang salah pada sesetengah kedai, tetapi pengguna tidak tahu cara membuat penilaian ini, jadi editor hari ini saya akan memberi anda penjelasan terperinci tentang beberapa fungsi di atas, jadi jika anda mempunyai apa-apa idea, hari ini editor akan menerangkan kepada anda secara terperinci bagaimana untuk memadamnya Jika anda berminat, datang dan lihat dengan editor sekarang Saya percaya bahawa semua orang Anda semua harus tahu sesuatu tentangnya, jangan ketinggalan. Padam
 Di manakah saya boleh menukar alamat Meituan saya? Tutorial pengubahsuaian alamat Meituan!
Mar 15, 2024 pm 04:07 PM
Di manakah saya boleh menukar alamat Meituan saya? Tutorial pengubahsuaian alamat Meituan!
Mar 15, 2024 pm 04:07 PM
1. Di manakah saya boleh menukar alamat Meituan saya? Tutorial pengubahsuaian alamat Meituan! Kaedah (1) 1. Masukkan Meituan My Page dan klik Settings. 2. Pilih maklumat peribadi. 3. Kemudian klik alamat penghantaran. 4. Akhir sekali, pilih alamat yang anda ingin ubah suai, klik ikon pen di sebelah kanan alamat dan ubah suainya. Kaedah (2) 1. Pada halaman utama apl Meituan, klik Ambil Keluar, kemudian klik Lagi Fungsi selepas masuk. 2. Dalam antara muka Lagi, klik Urus Alamat. 3. Dalam antara muka Alamat Penghantaran Saya, pilih Edit. 4. Ubah suai satu persatu mengikut keperluan anda, dan akhirnya klik untuk menyimpan alamat.
