
 Peranti teknologi
AI
Dari perspektif teknikal, mari kita bercakap tentang mengapa sistem pemanduan autonomi binokular sukar untuk dipopularkan?
Peranti teknologi
AI
Dari perspektif teknikal, mari kita bercakap tentang mengapa sistem pemanduan autonomi binokular sukar untuk dipopularkan?
Dari perspektif teknikal, mari kita bercakap tentang mengapa sistem pemanduan autonomi binokular sukar untuk dipopularkan?

Penglihatan monokular adalah senjata ajaib Mobileye (ME). Malah, ia juga dianggap penglihatan binokular, tetapi akhirnya memilih untuk menyerah.
Apakah yang bergantung pada julat monokular dan anggaran 3-D? Kotak Sempadan (BB) yang mengesan sasaran Jika halangan tidak dapat dikesan, sistem tidak boleh menganggarkan jarak dan sikap/orientasi 3-D. Tanpa pembelajaran mendalam, ME menganggarkan jarak berdasarkan BB, sikap dan ketinggian yang diperoleh melalui penentukuran kamera, dan andaian bahawa permukaan jalan adalah lurus.
Dengan pembelajaran mendalam, model NN boleh dilatih berdasarkan kebenaran tanah 3-D untuk mendapatkan anggaran saiz dan sikap 3D Jarak diperoleh berdasarkan prinsip garis selari (pandangan tunggal metrologi). Penyelesaian monokular L3 yang diumumkan oleh Baidu Apollo tidak lama dahulu agak jelas. Kertas rujukan ialah "Anggaran Kotak Sempadan 3D oleh Pembelajaran Mendalam dan Geometri".
Teropong pastinya boleh mengira paralaks dan kedalaman. , walaupun tiada halangan dikesan (kerana maklumat kedalaman tambahan, pengesan akan lebih baik daripada monokular), penggera akan dikeluarkan. Masalahnya ialah tidak semudah itu bagi sistem penglihatan binokular untuk menganggarkan perbezaan padanan stereo adalah masalah biasa dalam penglihatan komputer Garis dasar yang luas menghasilkan hasil julat yang tepat untuk sasaran jauh, manakala garis dasar yang pendek menghasilkan hasil julat yang baik berhampiran sasaran. Terdapat pertukaran di sini.
Sistem penglihatan binokular ADAS semasa di pasaran ialah Subaru EyeSight, dan prestasinya dikatakan baik.

Bas ulang-alik Apollo L4 yang dilancarkan oleh Baidu adalah dalam pengeluaran besar-besaran sebanyak 100 unit dan dilengkapi dengan sistem binokular. Projek letak kereta autonomi EU V-Charge juga menggunakan sistem penglihatan binokular ke hadapan, begitu juga sistem penyelidikan dan pembangunan pemanduan autonomi Berta Benz, yang disepadukan dengan sistem radar Antaranya, algoritma pengesanan halangan binokular Stixel sangat terkenal. Syarikat Tier-1 seperti Bosch dan Conti juga telah membangunkan penyelesaian penglihatan binokular pada masa lalu, tetapi mereka tidak memberi kesan kepada pasaran dan dilaporkan telah dihentikan.
Apabila bercakap tentang kesukaran sistem binokular, selain padanan stereo, terdapat juga penentukuran. Sistem yang ditentukur akan "hanyut", jadi penentukuran dalam talian adalah satu kemestian. Perkara yang sama berlaku untuk monokular, kerana ubah bentuk tayar dan bonggol badan kenderaan akan menjejaskan perubahan dalam parameter luaran kamera, dan beberapa parameter mesti ditentukur dan diperbetulkan dalam talian, seperti sudut pic dan sudut yaw.
Penentukuran dalam talian binokular adalah lebih rumit Oleh kerana pemadanan binokular dipermudahkan kepada carian 1-D sebanyak mungkin, adalah perlu untuk menggunakan pembetulan stereo untuk membuat paksi optik kedua-dua kanta. selari dan berserenjang dengan garis dasar. Oleh itu, berbanding dengan keuntungan yang diperoleh, peniaga akan berputus asa jika ia tidak kos efektif disebabkan oleh peningkatan kerumitan dan kos.
Penglihatan binokular telah disebut baru-baru ini kerana Ambarella, sebuah syarikat cip Silicon Valley, memperoleh Vis Lab dari Universiti Parma di Itali pada tahun 2014 dan membangunkan ADAS binokular dan cip pemanduan autonomi , selepas itu CES tahun lepas, ia mula memasuki syarikat kereta dan Tahap-1. Selain itu, Ambarella sedang meneruskan penyelidikan untuk meningkatkan prestasi sistem.
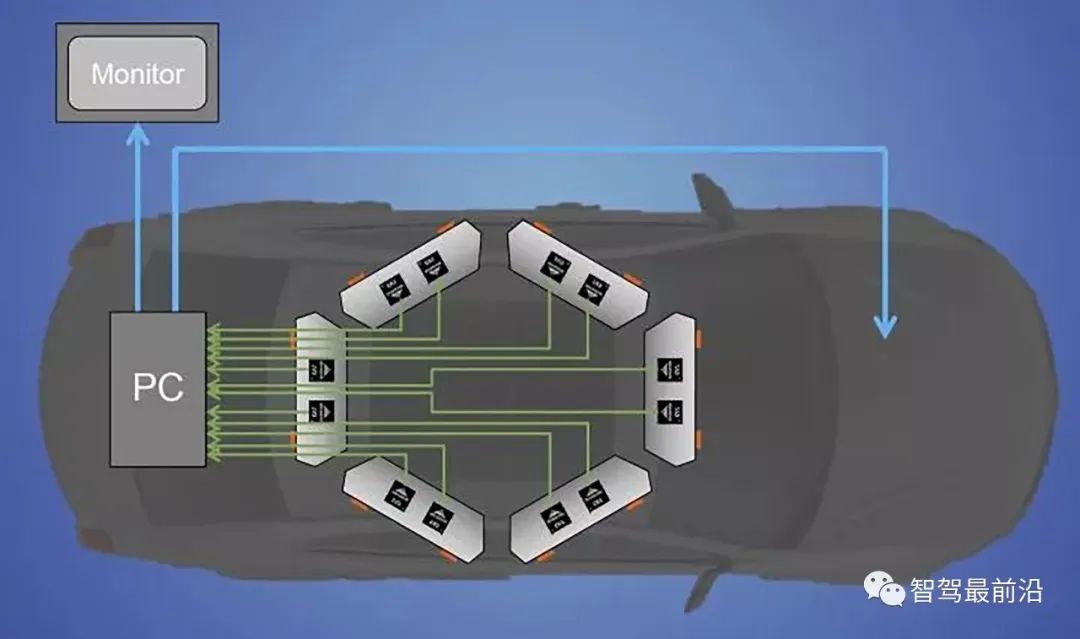
Gambar di bawah ialah gambarajah skematik enam pasang sistem penglihatan stereo yang dipasang pada bumbung kereta itu lebar garis dasarnya mungkin berbeza, dan jarak pengesanan berkesan juga berbeza. Penulis pernah menaiki kereta pandu sendiri dan dapat melihat 200 meter dari jauh dan 20-30 meter dari jauh. Ia sememangnya boleh melakukan penentukuran dalam talian dan melaraskan beberapa parameter penglihatan binokular pada bila-bila masa.
01 Padanan stereo
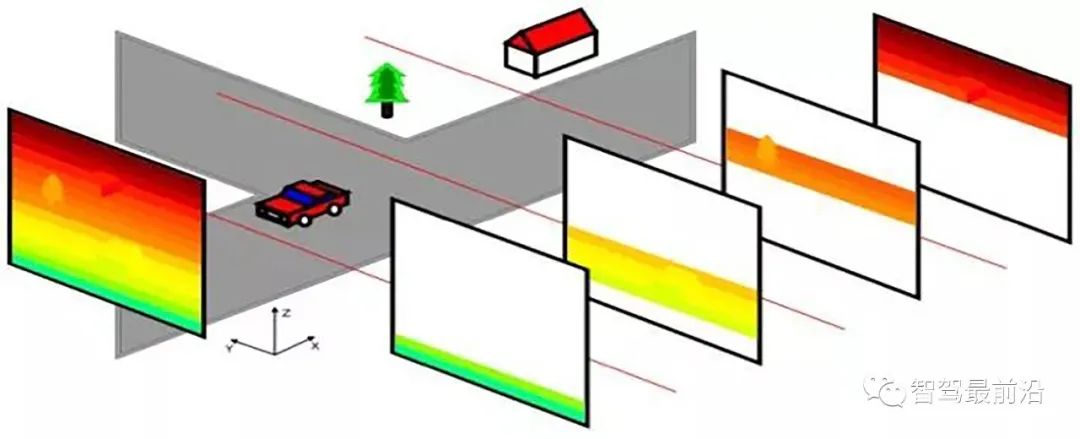
Mari kita bincangkan padanan stereo dahulu, iaitu, perbezaan/anggaran kedalaman . Seperti yang ditunjukkan dalam rajah, andaikan panjang fokus kamera kiri dan kanan ialah f, lebar garis dasar (garisan yang menghubungkan dua pusat optik) ialah B, kedalaman titik 3-D >
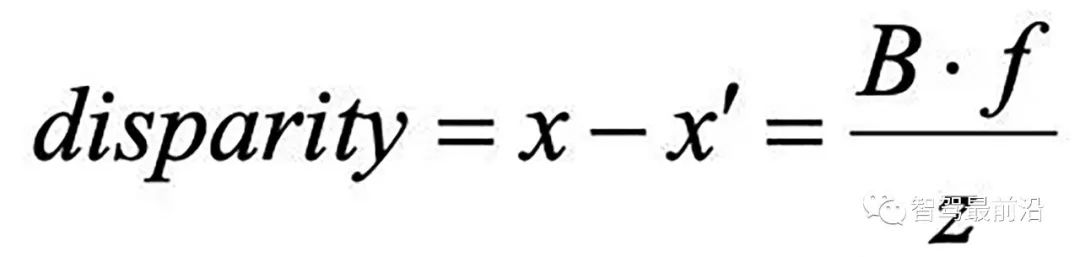
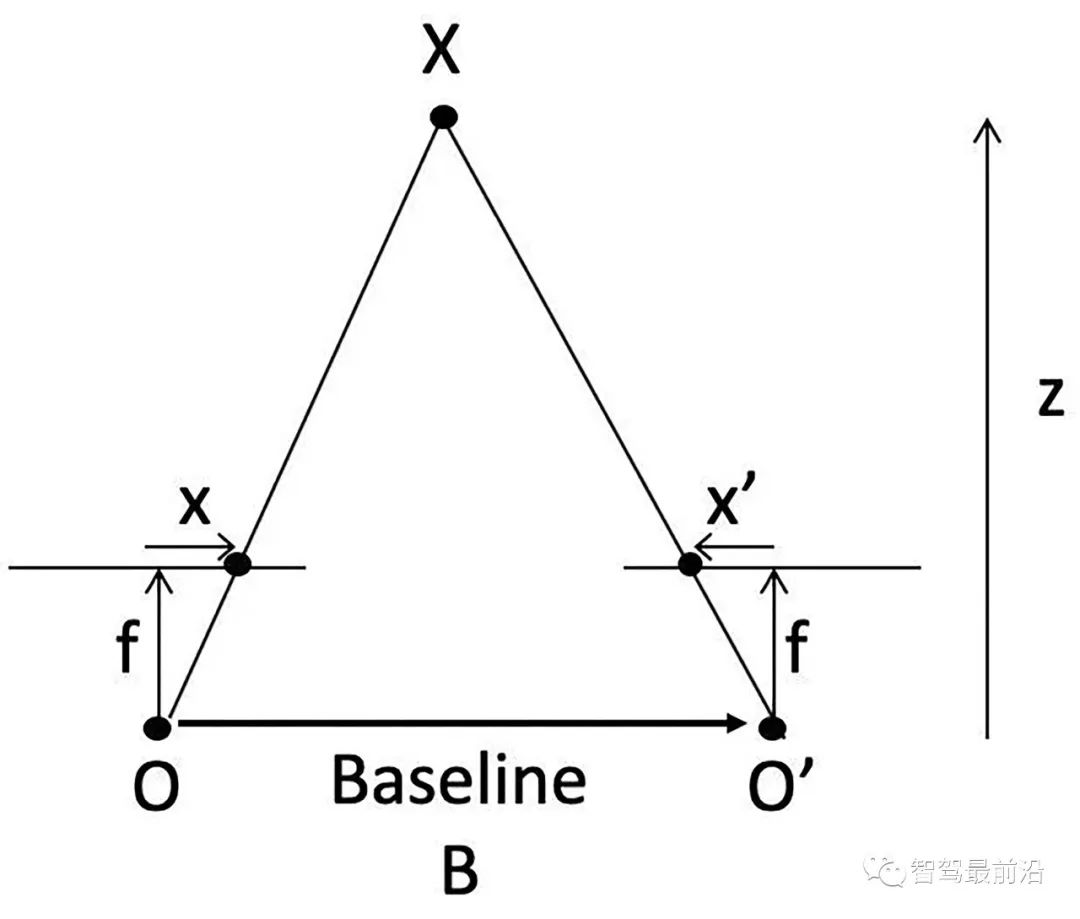
Paralaks yang boleh dilihat boleh mengira nilai kedalaman secara songsang. Tetapi perkara yang paling sukar di sini ialah bagaimana untuk menentukan imej yang dilihat oleh kanta kiri dan kanan adalah sasaran yang sama, iaitu masalah padanan.
Terdapat dua kaedah pemadanan, kaedah global dan kaedah tempatan Terdapat empat langkah untuk pemadanan binokular:
- Pengiraan kos pemadanan;<. .>
- Kaedah tempatan yang paling terkenal ialah SGM (semi-global matching) Kaedah yang digunakan oleh banyak produk adalah berdasarkan peningkatan ini.
- SGM menghampiri pengoptimuman global kepada gabungan berbilang masalah pengoptimuman tempatan Formula berikut ialah fungsi objektif pengoptimuman SGM yang dilaksanakan sebagai laluan pengoptimuman berbilang 1-D . Jumlah 🎜>
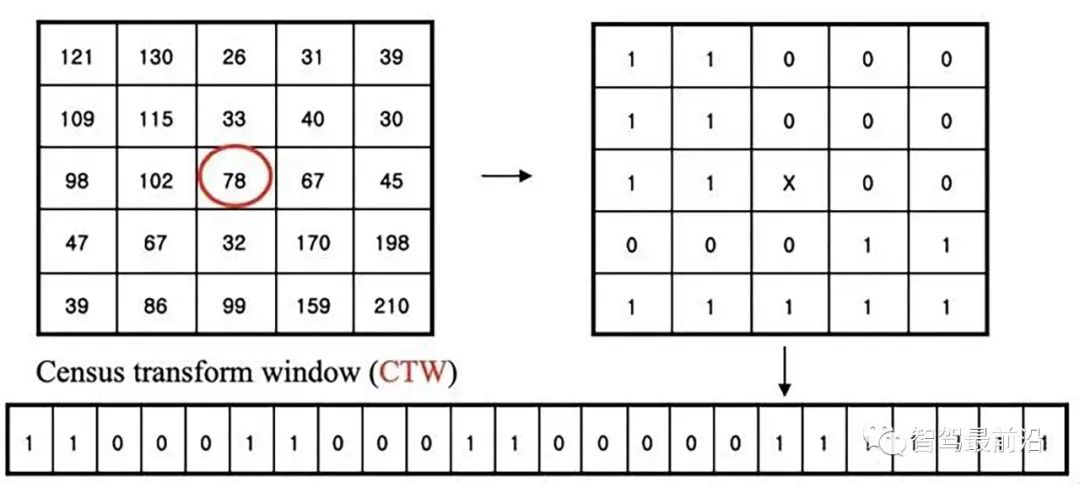
- Census Transform menukarkan piksel 8/24-bit kepada jujukan binari Satu lagi ciri binari yang dipanggil LBP (corak binari tempatan) adalah serupa dengannya. Algoritma padanan stereo adalah berdasarkan transformasi ini dan menukar padanan menjadi carian pengecilan jarak Hamming. RealSense Intel memperoleh syarikat permulaan visi binokular yang diasaskan pada tahun 1994 berdasarkan teknologi ini, dan juga memperoleh beberapa syarikat kecil lain dan menggabungkannya untuk menciptanya.
PatchMatch ialah algoritma yang mempercepatkan padanan templat imej , digunakan dalam pengiraan aliran optik dan anggaran ketaksamaan. Microsoft Research sebelum ini telah melakukan projek berdasarkan pembinaan semula 3-D kamera telefon mudah alih monokular, meniru KinectFusion yang berjaya sebelum ini berdasarkan algoritma RGB-D, dengan nama yang serupa dengan MonoFusion, di mana anggaran peta kedalaman menggunakan kaedah PatchMatch yang diubah suai .

1) Penyebaran spatial: Setiap piksel menyemak perbezaan dan parameter satah jiran kiri dan atas Jika kos padanan menjadi lebih kecil , Gantikan anggaran semasa; 
2) Paparan perambatan: Ubah piksel paparan lain, semak anggaran imej yang sepadan dan gantikannya jika ia menjadi lebih kecil; 🎜 >
3) Penyebaran sementara: pertimbangkan anggaran piksel yang sepadan dalam bingkai sebelumnya dan seterusnya4) Penapisan satah: jana sampel secara rawak , jika anggaran; menurunkan kos padanan, kemas kini.
5) Pemprosesan pasca: konsistensi kiri-kanan dan penapis median berwajaran untuk membuang outlier.
Gambar berikut ialah gambarajah skematik PM:
- 02 Penentukuran dalam talian
- Lagi mengenai penentukuran dalam talian.
- Ini ialah kaedah penentukuran yang menggunakan tanda jalan (lintas zebra): corak garisan selari lintasan zebra diketahui, lintasan zebra dikesan dan titik sudut diekstrak, dan corak lintasan zebra dikira untuk sepadan dengan permukaan jalan Parameter homografi digunakan untuk mendapatkan parameter penentukuran.
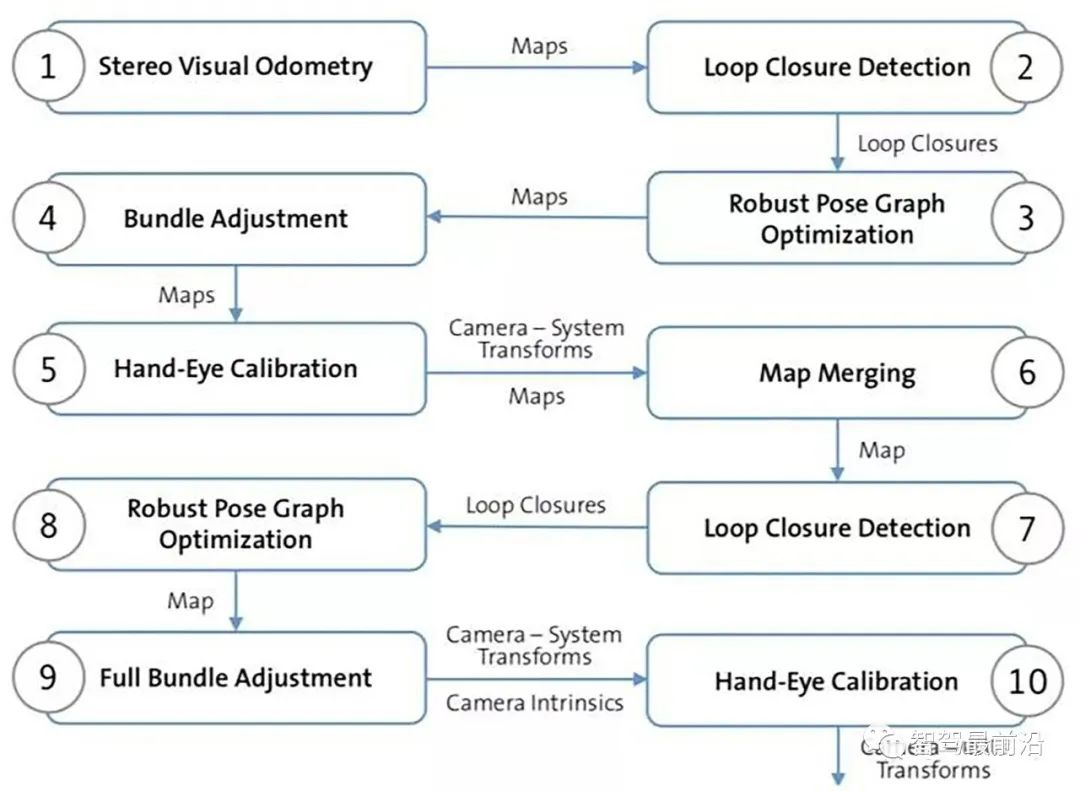
- Kaedah lain adalah berdasarkan VO dan SLAM, yang lebih rumit, tetapi ia boleh melakukan penentududukan berasaskan peta pada masa yang sama. Menggunakan SLAM untuk penentukuran dalam talian tidak sesuai untuk operasi frekuensi tinggi Rajah berikut ialah carta alir algoritmanya: Langkah 1-4, dapatkan peta berterusan global melalui penglihatan stereo SLAM memberikan anggaran awal kamera binokular transformasi, Langkah 6 Agregat peta semua kamera stereo ke dalam satu peta; dapatkan pose antara berbilang kamera dalam langkah 7-8.

Sama seperti kaedah monokular, penentukuran dalam talian boleh diselesaikan dengan cepat menggunakan andaian bahawa garisan lorong adalah selari dan jalan adalah rata, iaitu teori titik lenyap: dengan mengandaikan Model jalan rata, garisan lorong membujur yang jelas, tiada objek lain yang mempunyai tepi selari dengannya; sudut ketinggian/gulungan (sudut yaw/gulung) kamera kiri berbanding dengan permukaan jalan Kecil dengan cara ini, berbanding dengan titik lenyap yang dimulakan (berkaitan dengan penentukuran luar talian), jumlah hanyut bagi parameter luaran teropong boleh dikira ( Rajah 5-269). Algoritma adalah untuk menganggar ketinggian kamera/sudut serong dari titik lenyap.
03 Sistem pemanduan autonomi binokular biasa
Berikut memperkenalkan beberapa sistem pemanduan autonomi binokular tipikal .
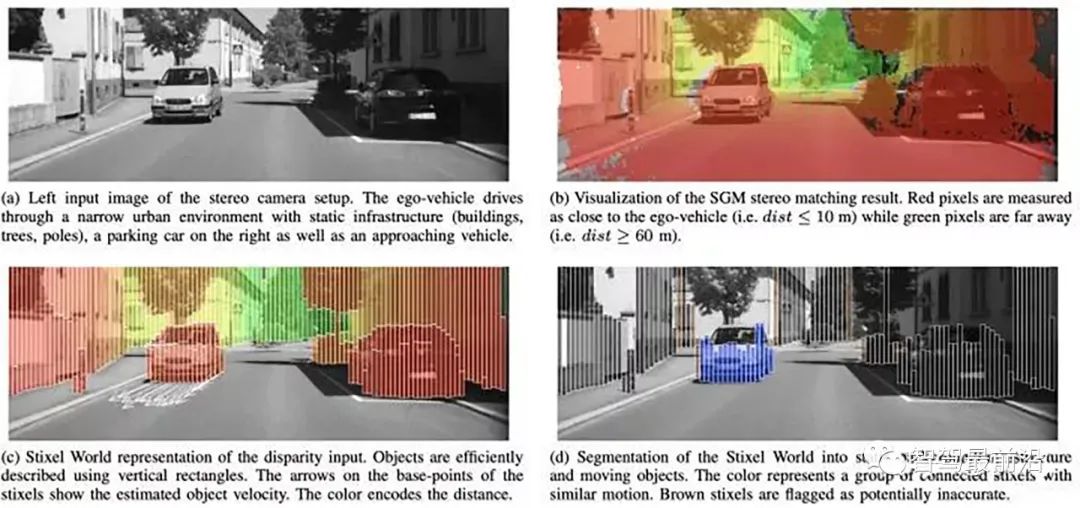
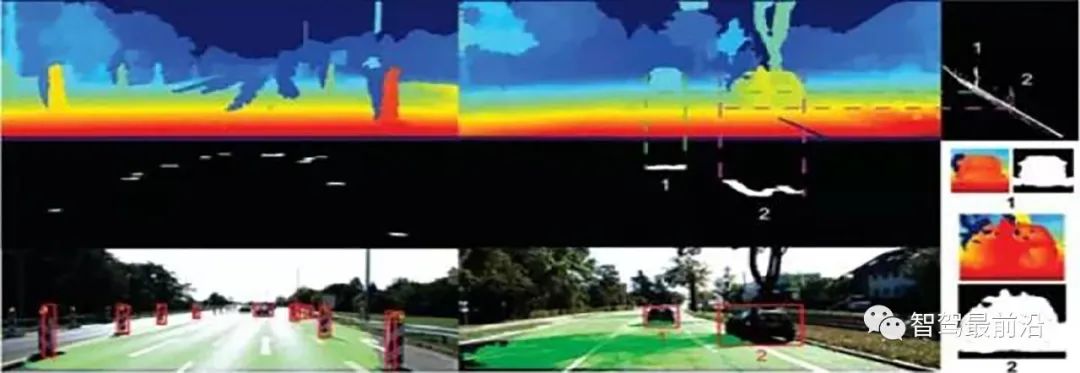
Algoritma pengesanan halangan Stixel yang digunakan oleh Berta Benz adalah berdasarkan andaian berikut: sasaran dalam tempat kejadian digambarkan sebagai lajur, pusat graviti sasaran berdiri di atas tanah , dan bahagian atas setiap sasaran ialah Bahagian bawah mempunyai kedalaman yang besar. Angka berikut (a-d) memperkenalkan cara keputusan jurang SGM menjana hasil segmentasi Stixel:
Rajah berikut ialah gambar rajah skema pengiraan Stixel: (a ) Berdasarkan dinamik Pengiraan ruang pemanduan bebas yang dirancang (b) Nilai atribut dalam pembahagian ketinggian (c) Imej kos (nilai skala kelabu terbalik) (d) Pembahagian ketinggian.
Ini ialah gambarajah blok dan hasil baharu Stixel selepas mereka menambah pembelajaran mendalam untuk melakukan gabungan paralaks:
Memperkenalkan algoritma halangan binokular awal VisLab, Sistem Pengesanan Halangan dan Lorong Generik (GOLD). Berdasarkan IPM (Pemetaan Perspektif Songsang), mengesan garis lorong dan mengira halangan di jalan raya berdasarkan perbezaan antara imej kiri dan kanan:
(a) Kiri . (b) Kanan (c) Kiri dipetakan semula (d) Dipetakan semula ke kanan (e) Perbezaan ambang dan ditapis antara pandangan yang dipetakan semula.
(a) Asli (b) Dipetakan semula (d) Dipertingkatkan.
Seni bina sistem EMAS
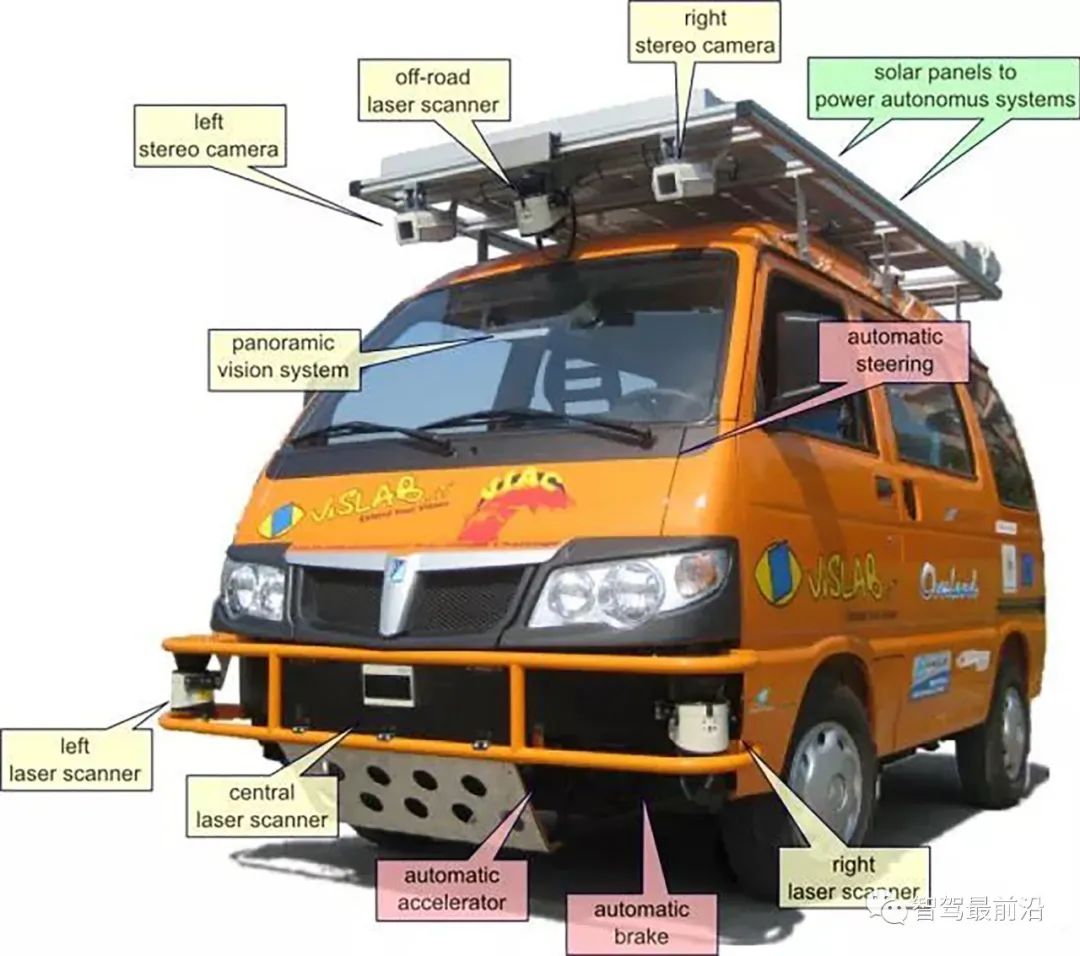
Ini adalah kenderaan VisLab yang menyertai pertandingan pemanduan autonomi VIAC (VisLab Intercontinental Autonomous Challenge). kamera binokular, terdapat juga laser pada Radar kenderaan sebagai bantuan kepada klasifikasi jalan.
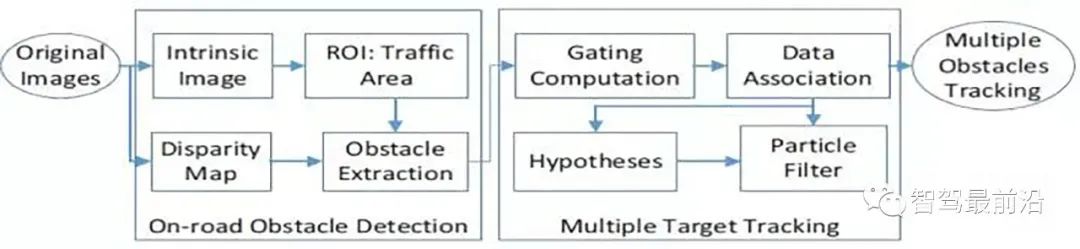
Ini ialah carta alir pengesanan halangan binokularnya: anggaran perbezaan menggunakan algoritma SGM dan algoritma berkaitan berdasarkan SAD.
Dua penapis ruang DSI (Disparity Space Image) ditambah dalam pasca pemprosesan, lihat Rajah 5-274, satu sedang melicinkan pemprosesan, The lain ialah pemprosesan trajektori gerakan berdasarkan navigasi inersia (IMU).
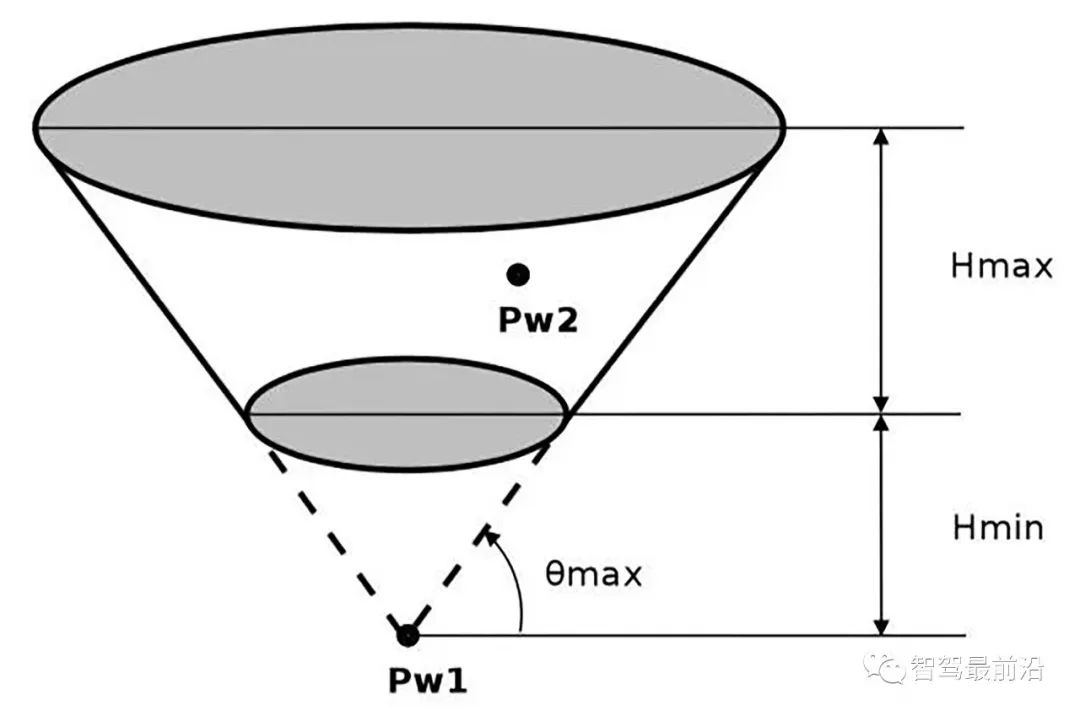
Algoritma pengesanan halangan menggunakan kaedah JPL, yang mengelompokkan halangan berdasarkan ciri susun atur spatial dan ciri fizikal kenderaan. Ciri-ciri fizikal termasuk ketinggian maksimum (kenderaan), ketinggian minimum (halangan) dan julat maksimum jalan yang boleh dilalui Kekangan ini menentukan kon terpenggal ruang (kon terpenggal), seperti yang ditunjukkan dalam rajah, kemudian dalam proses pengelompokan. semuanya jatuh Mata dalam kon terpenggal ditetapkan sebagai halangan.
Untuk mempercepatkan algoritma anggaran ketaksamaan, kaedah membahagikan DSI diguna pakai:
Kaedah klasik lain ialah mendapatkan paralaks jalan berdasarkan persamaan jalan (penglihatan stereo), dan mengira halangan di jalan raya berdasarkan ini:
04 Ringkasan
Secara amnya, kaedah pengesanan binokular halangan pada asasnya berdasarkan peta perbezaan , dan terdapat banyak kaedah berdasarkan paralaks jalan. Mungkin dengan perkembangan pesat pembelajaran mendalam dan peningkatan platform pengkomputeran, sistem pemanduan autonomi binokular akan menjadi lebih popular.





Atas ialah kandungan terperinci Dari perspektif teknikal, mari kita bercakap tentang mengapa sistem pemanduan autonomi binokular sukar untuk dipopularkan?. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

AI Hentai Generator
Menjana ai hentai secara percuma.

Artikel Panas
Alat panas

Notepad++7.3.1
Editor kod yang mudah digunakan dan percuma

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

Hantar Studio 13.0.1
Persekitaran pembangunan bersepadu PHP yang berkuasa

Dreamweaver CS6
Alat pembangunan web visual

SublimeText3 versi Mac
Perisian penyuntingan kod peringkat Tuhan (SublimeText3)
Topik panas
 1359
1359
 52
52

 Pendaraban matriks universal CUDA: dari kemasukan kepada kemahiran!
Mar 25, 2024 pm 12:30 PM
Pendaraban matriks universal CUDA: dari kemasukan kepada kemahiran!
Mar 25, 2024 pm 12:30 PM
Pendaraban Matriks Umum (GEMM) ialah bahagian penting dalam banyak aplikasi dan algoritma, dan juga merupakan salah satu petunjuk penting untuk menilai prestasi perkakasan komputer. Penyelidikan mendalam dan pengoptimuman pelaksanaan GEMM boleh membantu kami lebih memahami pengkomputeran berprestasi tinggi dan hubungan antara perisian dan sistem perkakasan. Dalam sains komputer, pengoptimuman GEMM yang berkesan boleh meningkatkan kelajuan pengkomputeran dan menjimatkan sumber, yang penting untuk meningkatkan prestasi keseluruhan sistem komputer. Pemahaman yang mendalam tentang prinsip kerja dan kaedah pengoptimuman GEMM akan membantu kami menggunakan potensi perkakasan pengkomputeran moden dengan lebih baik dan menyediakan penyelesaian yang lebih cekap untuk pelbagai tugas pengkomputeran yang kompleks. Dengan mengoptimumkan prestasi GEMM
 Sistem pemanduan pintar Qiankun ADS3.0 Huawei akan dilancarkan pada bulan Ogos dan akan dilancarkan pada Xiangjie S9 buat kali pertama
Jul 30, 2024 pm 02:17 PM
Sistem pemanduan pintar Qiankun ADS3.0 Huawei akan dilancarkan pada bulan Ogos dan akan dilancarkan pada Xiangjie S9 buat kali pertama
Jul 30, 2024 pm 02:17 PM
Pada 29 Julai, pada majlis pelepasan kereta baharu AITO Wenjie yang ke-400,000, Yu Chengdong, Pengarah Urusan Huawei, Pengerusi Terminal BG, dan Pengerusi Smart Car Solutions BU, menghadiri dan menyampaikan ucapan dan mengumumkan bahawa model siri Wenjie akan akan dilancarkan tahun ini Pada bulan Ogos, Huawei Qiankun ADS 3.0 versi telah dilancarkan, dan ia dirancang untuk terus naik taraf dari Ogos hingga September. Xiangjie S9, yang akan dikeluarkan pada 6 Ogos, akan memperkenalkan sistem pemanduan pintar ADS3.0 Huawei. Dengan bantuan lidar, versi Huawei Qiankun ADS3.0 akan meningkatkan keupayaan pemanduan pintarnya, mempunyai keupayaan bersepadu hujung-ke-hujung, dan mengguna pakai seni bina hujung ke hujung baharu GOD (pengenalpastian halangan am)/PDP (ramalan). membuat keputusan dan kawalan), menyediakan fungsi NCA pemanduan pintar dari ruang letak kereta ke ruang letak kereta, dan menaik taraf CAS3.0
 Di luar ORB-SLAM3! SL-SLAM: Adegan bertekstur lemah ringan, kegelisahan teruk dan lemah semuanya dikendalikan
May 30, 2024 am 09:35 AM
Di luar ORB-SLAM3! SL-SLAM: Adegan bertekstur lemah ringan, kegelisahan teruk dan lemah semuanya dikendalikan
May 30, 2024 am 09:35 AM
Ditulis sebelum ini, hari ini kita membincangkan bagaimana teknologi pembelajaran mendalam boleh meningkatkan prestasi SLAM berasaskan penglihatan (penyetempatan dan pemetaan serentak) dalam persekitaran yang kompleks. Dengan menggabungkan kaedah pengekstrakan ciri dalam dan pemadanan kedalaman, di sini kami memperkenalkan sistem SLAM visual hibrid serba boleh yang direka untuk meningkatkan penyesuaian dalam senario yang mencabar seperti keadaan cahaya malap, pencahayaan dinamik, kawasan bertekstur lemah dan seks yang teruk. Sistem kami menyokong berbilang mod, termasuk konfigurasi monokular, stereo, monokular-inersia dan stereo-inersia lanjutan. Selain itu, ia juga menganalisis cara menggabungkan SLAM visual dengan kaedah pembelajaran mendalam untuk memberi inspirasi kepada penyelidikan lain. Melalui percubaan yang meluas pada set data awam dan data sampel sendiri, kami menunjukkan keunggulan SL-SLAM dari segi ketepatan kedudukan dan keteguhan penjejakan.
 Versi sistem Apple 16 manakah yang terbaik?
Mar 08, 2024 pm 05:16 PM
Versi sistem Apple 16 manakah yang terbaik?
Mar 08, 2024 pm 05:16 PM
Versi terbaik sistem Apple 16 ialah iOS16.1.4 Versi terbaik sistem iOS16 mungkin berbeza dari orang ke orang Penambahan dan peningkatan dalam pengalaman penggunaan harian juga telah dipuji oleh ramai pengguna. Versi sistem Apple 16 yang manakah adalah yang terbaik Jawapan: iOS16.1.4 Versi terbaik sistem iOS 16 mungkin berbeza dari orang ke orang. Menurut maklumat awam, iOS16, yang dilancarkan pada 2022, dianggap sebagai versi yang sangat stabil dan berprestasi, dan pengguna cukup berpuas hati dengan pengalaman keseluruhannya. Selain itu, penambahan ciri baharu dan penambahbaikan dalam pengalaman penggunaan harian dalam iOS16 juga telah diterima baik oleh ramai pengguna. Terutamanya dari segi hayat bateri yang dikemas kini, prestasi isyarat dan kawalan pemanasan, maklum balas pengguna agak positif. Walau bagaimanapun, memandangkan iPhone14
 Sentiasa baru! Siri Huawei Mate60 dinaik taraf kepada HarmonyOS 4.2: Peningkatan awan AI, Dialek Xiaoyi sangat mudah digunakan
Jun 02, 2024 pm 02:58 PM
Sentiasa baru! Siri Huawei Mate60 dinaik taraf kepada HarmonyOS 4.2: Peningkatan awan AI, Dialek Xiaoyi sangat mudah digunakan
Jun 02, 2024 pm 02:58 PM
Pada 11 April, Huawei secara rasmi mengumumkan pelan peningkatan 100 mesin HarmonyOS 4.2 kali ini, lebih daripada 180 peranti akan mengambil bahagian dalam peningkatan, meliputi telefon bimbit, tablet, jam tangan, fon kepala, skrin pintar dan peranti lain. Pada bulan lalu, dengan kemajuan mantap pelan peningkatan 100 mesin HarmonyOS4.2, banyak model popular termasuk Huawei Pocket2, siri Huawei MateX5, siri nova12, siri Huawei Pura, dll. juga telah mula menaik taraf dan menyesuaikan diri, yang bermaksud bahawa akan ada Lebih ramai pengguna model Huawei boleh menikmati pengalaman biasa dan selalunya baharu yang dibawa oleh HarmonyOS. Berdasarkan maklum balas pengguna, pengalaman model siri Huawei Mate60 telah bertambah baik dalam semua aspek selepas menaik taraf HarmonyOS4.2. Terutamanya Huawei M
 Pembinaan semula statik visual tulen pertama bagi pemanduan autonomi
Jun 02, 2024 pm 03:24 PM
Pembinaan semula statik visual tulen pertama bagi pemanduan autonomi
Jun 02, 2024 pm 03:24 PM
Penyelesaian anotasi visual semata-mata menggunakan penglihatan serta beberapa data daripada GPS, IMU dan penderia kelajuan roda untuk anotasi dinamik. Sudah tentu, untuk senario pengeluaran besar-besaran, ia tidak semestinya visual semata-mata. Sesetengah kenderaan yang dihasilkan secara besar-besaran akan mempunyai penderia seperti radar keadaan pepejal (AT128). Jika kami mencipta gelung tertutup data dari perspektif pengeluaran besar-besaran dan menggunakan semua penderia ini, kami boleh menyelesaikan masalah pelabelan objek dinamik dengan berkesan. Tetapi tiada radar keadaan pepejal dalam rancangan kami. Oleh itu, kami akan memperkenalkan penyelesaian pelabelan pengeluaran besar-besaran yang paling biasa ini. Teras penyelesaian anotasi visual semata-mata terletak pada pembinaan semula pose berketepatan tinggi. Kami menggunakan skema pembinaan semula pose Structure from Motion (SFM) untuk memastikan ketepatan pembinaan semula. Tetapi lulus
 Apakah sistem pengendalian komputer?
Jan 12, 2024 pm 03:12 PM
Apakah sistem pengendalian komputer?
Jan 12, 2024 pm 03:12 PM
Sistem pengendalian komputer ialah sistem yang digunakan untuk mengurus perkakasan komputer dan program perisian Ia juga merupakan program sistem pengendalian yang dibangunkan berdasarkan semua sistem perisian yang berbeza mempunyai pengguna yang berbeza. Di bawah, editor akan berkongsi dengan anda apa itu sistem pengendalian komputer. Apa yang dipanggil sistem pengendalian adalah untuk mengurus perkakasan komputer dan program perisian Semua perisian dibangunkan berdasarkan program sistem pengendalian. Sebenarnya, terdapat banyak jenis sistem pengendalian, termasuk yang untuk kegunaan industri, kegunaan komersial dan kegunaan peribadi, meliputi pelbagai aplikasi. Di bawah, editor akan menerangkan kepada anda apa itu sistem pengendalian komputer. Apakah sistem pengendalian komputer sistem Windows Sistem Windows ialah sistem pengendalian yang dibangunkan oleh Microsoft Corporation dari Amerika Syarikat. daripada kebanyakannya
 Penjelasan terperinci tentang cara mengubah suai tarikh sistem dalam pangkalan data Oracle
Mar 09, 2024 am 10:21 AM
Penjelasan terperinci tentang cara mengubah suai tarikh sistem dalam pangkalan data Oracle
Mar 09, 2024 am 10:21 AM
Penjelasan terperinci tentang kaedah mengubah suai tarikh sistem dalam pangkalan data Oracle Dalam pangkalan data Oracle, kaedah mengubah suai tarikh sistem terutamanya melibatkan pengubahsuaian parameter NLS_DATE_FORMAT dan menggunakan fungsi SYSDATE. Artikel ini akan memperkenalkan kedua-dua kaedah ini dan contoh kod khusus mereka secara terperinci untuk membantu pembaca lebih memahami dan menguasai operasi mengubah suai tarikh sistem dalam pangkalan data Oracle. 1. Ubah suai kaedah parameter NLS_DATE_FORMAT NLS_DATE_FORMAT ialah data Oracle
