
 pembangunan bahagian belakang
tutorial php
Bagaimana untuk membangunkan pemanduan autonomi dan Internet Kenderaan dalam PHP?
pembangunan bahagian belakang
tutorial php
Bagaimana untuk membangunkan pemanduan autonomi dan Internet Kenderaan dalam PHP?
Bagaimana untuk membangunkan pemanduan autonomi dan Internet Kenderaan dalam PHP?

Sebagai bahasa pembangunan web yang popular, PHP boleh membantu kami membina aplikasi pemanduan autonomi dan Internet Kenderaan yang cekap dan berskala. Teknologi pemanduan autonomi semakin digunakan secara meluas, dan Internet Kenderaan telah menjadi trend baharu dalam industri automotif Oleh itu, adalah sangat penting untuk memahami cara menggunakan PHP untuk pemanduan autonomi dan pembangunan Internet Kenderaan.
Teknologi pemanduan autonomi
Teknologi pemanduan autonomi bermakna kereta boleh memandu secara autonomi tanpa campur tangan pemandu. Dalam teknologi pemanduan autonomi, kenderaan menggunakan pelbagai penderia (seperti radar, kamera, lidar, dll.) untuk mengumpul maklumat alam sekitar dan menggunakan algoritma lanjutan untuk menyelesaikan masalah seperti mengelakkan perlanggaran, memperlahankan dan menukar lorong serta arah pemanduan. Di sini, PHP boleh membantu kami membina aplikasi web yang menyokong fungsi pemanduan autonomi, termasuk beberapa fungsi asas, seperti:
- Pengurusan data
Teknologi pemanduan autonomi akan Jumlah yang besar data dijana, termasuk data penderia, data operasi kenderaan, maklumat trafik, dsb. Menguruskan data ini sangat penting sehingga ia menjadi teras kepada banyak aplikasi memandu sendiri.
- Komunikasi dan kerjasama
Kenderaan autonomi mesti boleh saling beroperasi dengan kenderaan dan infrastruktur lain untuk bertukar maklumat, menyelaraskan tindakan, dsb. dalam keadaan jalan yang berbeza. PHP boleh membantu kami membina sistem komunikasi untuk penderia dan peranti yang berbeza, dan membantu kerjasama kenderaan untuk mencapai operasi automatik.
- Integrasi dan Ujian
Dalam teknologi pemanduan autonomi, perkakasan dan perisian mesti berfungsi dengan baik untuk mencapai pemanduan autonomi. PHP boleh membantu kami menguji perisian dan perkakasan bersepadu, dan membangunkan beberapa alat ujian berasaskan simulator.
Teknologi Internet Kenderaan
Teknologi Internet Kenderaan merujuk kepada rangkaian yang terdiri daripada kereta pintar dan kenderaan bersambung, yang boleh menghubungkan kenderaan, manusia dan infrastruktur serta membentuk sistem interaktif. Oleh itu, dalam pembangunan Internet Kenderaan, PHP boleh membantu kami membina aplikasi dalam aspek berikut:
- Kawalan pintar
Teknologi Internet of Vehicles boleh membantu kenderaan dikawal pemanduan dengan bijak, seperti navigasi automatik, tempat letak kereta automatik, brek kecemasan automatik, dsb. PHP boleh membantu kami membina aplikasi web yang berkomunikasi dengan Internet Kenderaan supaya kenderaan boleh melakukan operasi ini dengan selamat.
- Maklumat Trafik
Teknologi Internet Kenderaan boleh mengumpul dan menganalisis keadaan pemanduan, seperti aliran trafik, kelajuan kenderaan, pembinaan jalan raya, dll., untuk membantu pemandu merancang dengan lebih baik laluan memandu. PHP boleh membantu kami membina aplikasi Internet Kenderaan untuk meramal dan menganalisis aliran trafik dan memberikan cadangan pemanduan.
- Perkongsian Kereta
Teknologi Internet Kenderaan boleh dikongsi antara kenderaan yang berbeza untuk mengurangkan penggunaan dan pelepasan kenderaan tunggal. PHP boleh membantu kami membangunkan aplikasi web untuk perkongsian kereta, membenarkan pemilik kereta mengurus rancangan perkongsian kereta dan perkhidmatan penghantaran dalam talian.
- Pemantauan Tingkah Laku Pemanduan
Aplikasi Internet Kenderaan boleh mengumpul data pemanduan pemandu dan menggunakan algoritma lanjutan untuk menganalisis data ini bagi membimbing pemandu memandu dengan selamat. PHP boleh membantu kami membina dan mengurus aplikasi yang berkomunikasi dengan Internet Kenderaan untuk memantau tingkah laku pemandu dan operasi kenderaan bagi memastikan semua kenderaan dipandu dengan selamat.
Ringkasan
Dalam artikel ini, kami mempelajari cara menggunakan PHP untuk melaksanakan pemanduan autonomi dan teknologi Internet Kenderaan. PHP ialah bahasa pengaturcaraan web popular yang membantu kami membina aplikasi yang cekap dan berskala. Teknologi pemanduan autonomi dan teknologi Internet Kenderaan adalah trend baharu dalam industri automotif Mempelajari cara menggunakan PHP untuk membangunkan aplikasi untuk teknologi ini mempunyai potensi besar untuk pembangunan masa hadapan.
Atas ialah kandungan terperinci Bagaimana untuk membangunkan pemanduan autonomi dan Internet Kenderaan dalam PHP?. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

AI Hentai Generator
Menjana ai hentai secara percuma.

Artikel Panas
Alat panas

Notepad++7.3.1
Editor kod yang mudah digunakan dan percuma

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

Hantar Studio 13.0.1
Persekitaran pembangunan bersepadu PHP yang berkuasa

Dreamweaver CS6
Alat pembangunan web visual

SublimeText3 versi Mac
Perisian penyuntingan kod peringkat Tuhan (SublimeText3)
Topik panas
 1382
1382
 52
52

 Baris format PHP ke CSV dan tulis penuding fail
Mar 22, 2024 am 09:00 AM
Baris format PHP ke CSV dan tulis penuding fail
Mar 22, 2024 am 09:00 AM
Artikel ini akan menerangkan secara terperinci bagaimana PHP memformat baris ke dalam CSV dan menulis penunjuk fail saya rasa ia agak praktikal, jadi saya berkongsi dengan anda sebagai rujukan saya harap anda boleh memperoleh sesuatu selepas membaca artikel ini. Format baris ke CSV dan tulis ke penuding fail Langkah 1: Buka penuding fail $file=fopen("path/to/file.csv","w"); kepada rentetan CSV. Fungsi ini menerima parameter berikut: $fail: penuding fail $medan: medan CSV sebagai tatasusunan $pembatas: pembatas medan (pilihan) $kepungan: petikan medan (
 Bagaimana untuk menyelesaikan masalah ekor panjang dalam senario pemanduan autonomi?
Jun 02, 2024 pm 02:44 PM
Bagaimana untuk menyelesaikan masalah ekor panjang dalam senario pemanduan autonomi?
Jun 02, 2024 pm 02:44 PM
Semalam semasa temu bual, saya telah ditanya sama ada saya telah membuat sebarang soalan berkaitan ekor panjang, jadi saya fikir saya akan memberikan ringkasan ringkas. Masalah ekor panjang pemanduan autonomi merujuk kepada kes tepi dalam kenderaan autonomi, iaitu, kemungkinan senario dengan kebarangkalian yang rendah untuk berlaku. Masalah ekor panjang yang dirasakan adalah salah satu sebab utama yang kini mengehadkan domain reka bentuk pengendalian kenderaan autonomi pintar satu kenderaan. Seni bina asas dan kebanyakan isu teknikal pemanduan autonomi telah diselesaikan, dan baki 5% masalah ekor panjang secara beransur-ansur menjadi kunci untuk menyekat pembangunan pemanduan autonomi. Masalah ini termasuk pelbagai senario yang berpecah-belah, situasi yang melampau dan tingkah laku manusia yang tidak dapat diramalkan. "Ekor panjang" senario tepi dalam pemanduan autonomi merujuk kepada kes tepi dalam kenderaan autonomi (AVs) kes Edge adalah senario yang mungkin dengan kebarangkalian yang rendah untuk berlaku. kejadian yang jarang berlaku ini
 PHP menukar umask semasa
Mar 22, 2024 am 08:41 AM
PHP menukar umask semasa
Mar 22, 2024 am 08:41 AM
Artikel ini akan menerangkan secara terperinci tentang menukar umask semasa dalam PHP Editor berpendapat ia agak praktikal, jadi saya berkongsi dengan anda sebagai rujukan saya harap anda boleh memperoleh sesuatu selepas membaca artikel ini. Gambaran keseluruhan PHP yang menukar umask semasa umask ialah fungsi php yang digunakan untuk menetapkan kebenaran fail lalai untuk fail dan direktori yang baru dibuat. Ia menerima satu hujah, iaitu nombor perlapanan yang mewakili kebenaran untuk menyekat. Sebagai contoh, untuk menghalang kebenaran menulis pada fail yang baru dibuat, anda akan menggunakan 002. Kaedah menukar umask Terdapat dua cara untuk menukar umask semasa dalam PHP: Menggunakan fungsi umask(): Fungsi umask() menukar secara langsung umask semasa. Sintaksnya ialah: intumas
 PHP mencipta fail dengan nama fail yang unik
Mar 21, 2024 am 11:22 AM
PHP mencipta fail dengan nama fail yang unik
Mar 21, 2024 am 11:22 AM
Artikel ini akan menerangkan secara terperinci cara membuat fail dengan nama fail yang unik dalam PHP Editor berpendapat ia agak praktikal, jadi saya berkongsi dengan anda sebagai rujukan saya harap anda boleh memperoleh sesuatu selepas membaca artikel ini. Mencipta fail dengan nama fail unik dalam PHP Pengenalan Mencipta fail dengan nama fail unik dalam PHP adalah penting untuk mengatur dan mengurus sistem fail anda. Nama fail yang unik memastikan bahawa fail sedia ada tidak ditimpa dan menjadikannya lebih mudah untuk mencari dan mendapatkan semula fail tertentu. Panduan ini akan merangkumi beberapa cara untuk menjana nama fail unik dalam PHP. Kaedah 1: Gunakan fungsi uniqid() Fungsi uniqid() menjana rentetan unik berdasarkan masa semasa dan mikrosaat. Rentetan ini boleh digunakan sebagai asas untuk nama fail.
 Mari kita bincangkan tentang sistem pemanduan autonomi hujung ke hujung dan generasi seterusnya, serta beberapa salah faham tentang pemanduan autonomi hujung ke hujung?
Apr 15, 2024 pm 04:13 PM
Mari kita bincangkan tentang sistem pemanduan autonomi hujung ke hujung dan generasi seterusnya, serta beberapa salah faham tentang pemanduan autonomi hujung ke hujung?
Apr 15, 2024 pm 04:13 PM
Pada bulan lalu, atas sebab-sebab yang diketahui umum, saya telah mengadakan pertukaran yang sangat intensif dengan pelbagai guru dan rakan sekelas dalam industri. Topik yang tidak dapat dielakkan dalam pertukaran secara semula jadi adalah hujung ke hujung dan Tesla FSDV12 yang popular. Saya ingin mengambil kesempatan ini untuk menyelesaikan beberapa buah fikiran dan pendapat saya pada masa ini untuk rujukan dan perbincangan anda. Bagaimana untuk mentakrifkan sistem pemanduan autonomi hujung ke hujung, dan apakah masalah yang sepatutnya dijangka diselesaikan hujung ke hujung? Menurut definisi yang paling tradisional, sistem hujung ke hujung merujuk kepada sistem yang memasukkan maklumat mentah daripada penderia dan secara langsung mengeluarkan pembolehubah yang membimbangkan tugas. Sebagai contoh, dalam pengecaman imej, CNN boleh dipanggil hujung-ke-hujung berbanding kaedah pengekstrak ciri + pengelas tradisional. Dalam tugas pemanduan autonomi, masukkan data daripada pelbagai penderia (kamera/LiDAR
 SOTA terbaharu nuScenes |. SparseAD: Pertanyaan jarang membantu pemanduan autonomi hujung ke hujung yang cekap!
Apr 17, 2024 pm 06:22 PM
SOTA terbaharu nuScenes |. SparseAD: Pertanyaan jarang membantu pemanduan autonomi hujung ke hujung yang cekap!
Apr 17, 2024 pm 06:22 PM
Ditulis di hadapan & titik permulaan Paradigma hujung ke hujung menggunakan rangka kerja bersatu untuk mencapai pelbagai tugas dalam sistem pemanduan autonomi. Walaupun kesederhanaan dan kejelasan paradigma ini, prestasi kaedah pemanduan autonomi hujung ke hujung pada subtugas masih jauh ketinggalan berbanding kaedah tugasan tunggal. Pada masa yang sama, ciri pandangan mata burung (BEV) padat yang digunakan secara meluas dalam kaedah hujung ke hujung sebelum ini menyukarkan untuk membuat skala kepada lebih banyak modaliti atau tugasan. Paradigma pemanduan autonomi hujung ke hujung (SparseAD) tertumpu carian jarang dicadangkan di sini, di mana carian jarang mewakili sepenuhnya keseluruhan senario pemanduan, termasuk ruang, masa dan tugas, tanpa sebarang perwakilan BEV yang padat. Khususnya, seni bina jarang bersatu direka bentuk untuk kesedaran tugas termasuk pengesanan, penjejakan dan pemetaan dalam talian. Di samping itu, berat
 FisheyeDetNet: algoritma pengesanan sasaran pertama berdasarkan kamera fisheye
Apr 26, 2024 am 11:37 AM
FisheyeDetNet: algoritma pengesanan sasaran pertama berdasarkan kamera fisheye
Apr 26, 2024 am 11:37 AM
Pengesanan objek ialah masalah yang agak matang dalam sistem pemanduan autonomi, antaranya pengesanan pejalan kaki adalah salah satu algoritma terawal untuk digunakan. Penyelidikan yang sangat komprehensif telah dijalankan dalam kebanyakan kertas kerja. Walau bagaimanapun, persepsi jarak menggunakan kamera fisheye untuk pandangan sekeliling agak kurang dikaji. Disebabkan herotan jejari yang besar, perwakilan kotak sempadan standard sukar dilaksanakan dalam kamera fisheye. Untuk mengurangkan perihalan di atas, kami meneroka kotak sempadan lanjutan, elips dan reka bentuk poligon am ke dalam perwakilan kutub/sudut dan mentakrifkan metrik mIOU pembahagian contoh untuk menganalisis perwakilan ini. Model fisheyeDetNet yang dicadangkan dengan bentuk poligon mengatasi model lain dan pada masa yang sama mencapai 49.5% mAP pada set data kamera fisheye Valeo untuk pemanduan autonomi
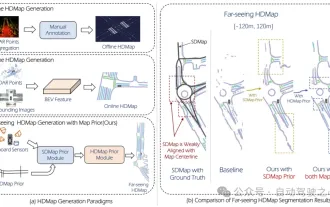 Pembunuh pengeluaran besar-besaran! P-Mapnet: Menggunakan peta SDMap berketepatan rendah sebelum ini, prestasi pemetaan dipertingkatkan dengan hampir 20 mata!
Mar 28, 2024 pm 02:36 PM
Pembunuh pengeluaran besar-besaran! P-Mapnet: Menggunakan peta SDMap berketepatan rendah sebelum ini, prestasi pemetaan dipertingkatkan dengan hampir 20 mata!
Mar 28, 2024 pm 02:36 PM
Seperti yang ditulis di atas, salah satu algoritma yang digunakan oleh sistem pemanduan autonomi semasa untuk menghilangkan pergantungan pada peta berketepatan tinggi adalah untuk mengambil kesempatan daripada fakta bahawa prestasi persepsi dalam julat jarak jauh masih lemah. Untuk tujuan ini, kami mencadangkan P-MapNet, di mana "P" memfokuskan pada menggabungkan peta sebelum untuk meningkatkan prestasi model. Khususnya, kami mengeksploitasi maklumat terdahulu dalam SDMap dan HDMap: di satu pihak, kami mengekstrak data SDMap yang sejajar dengan lemah daripada OpenStreetMap dan mengekodkannya ke dalam istilah bebas untuk menyokong input. Terdapat masalah penjajaran lemah antara input yang diubah suai dengan ketat dan HD+Map sebenar Struktur kami berdasarkan mekanisme Cross-attention boleh memfokus secara adaptif pada rangka SDMap dan membawa peningkatan prestasi yang ketara.
