
 Peranti teknologi
AI
Artifak spelunking? Dron pusingan sendiri pemutar tunggal dengan navigasi autonomi, lebih cekap!
Peranti teknologi
AI
Artifak spelunking? Dron pusingan sendiri pemutar tunggal dengan navigasi autonomi, lebih cekap!
Artifak spelunking? Dron pusingan sendiri pemutar tunggal dengan navigasi autonomi, lebih cekap!

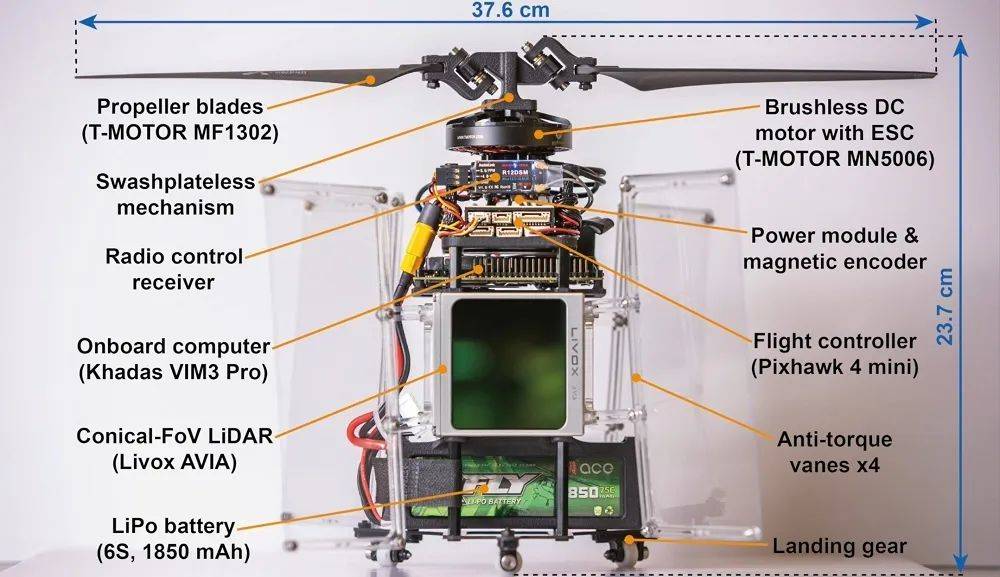
Rajah struktur PULSAR
[Laporan Komprehensif Dron Rangkaian Global] Berita dari Universiti Hong Kong, baru-baru ini, sebuah pasukan yang diketuai oleh Dr. Zhang Fu, Penolong Profesor Jabatan Kejuruteraan Mekanikal, Pusat Pengajian Kejuruteraan, Universiti Hong Kong (HKU) , baru-baru ini telah mereka bentuk penerbangan berkuasa tanpa memerlukan pemandu Drone pengesan radar dipanggil PULSAR. "Pulsar" mempunyai pelbagai fungsi seperti penderiaan dan pemetaan, sama seperti adegan dalam filem fiksyen sains "Prometheus" di mana manusia menggunakan pengesan putaran untuk membina peta tiga dimensi gua dalam masa nyata, menjadi kenyataan.
Menurut laporan, kepentingan dron semakin meningkat secara beransur-ansur dalam banyak bidang seperti mencari dan menyelamat, penerokaan gua, dan pemetaan seni bina. Pasukan Dr. Zhang menumpukan pada gerakan putaran "Pulsar" menggunakan penerbangan berkuasa dan tidak perlu memandu penderiaan radar kerana gerakan putaran mereka dan mod pengimbasan pancaran lidar, mereka secara intuitif serupa dengan pulsar dalam astronomi sangat serupa. "Pulsar" dilengkapi dengan komputer mikro onboard dan lidar, membolehkan persepsi autonomi sepenuhnya, pemetaan, perancangan dan kawalan, tanpa memerlukan bantuan peralatan luaran sama ada dalam persekitaran dalaman atau luaran. Penggerak tunggal digunakan pada pulsar untuk memacu mekanisme tanpa plat swashplate yang boleh menghasilkan tujahan dan tork secara serentak.
Pasukan Dr. Zhang menggunakan "Pulsar" untuk menjalankan eksperimen dalam penerokaan alam sekitar dan pengelakkan halangan dinamik berbilang arah. dalam persekitaran dalam masa nyata.
"Pulsar" mempunyai keupayaan untuk menjalankan navigasi automatik sepenuhnya pada waktu malam, menunjukkan bahawa prestasi navigasinya tidak dihadkan oleh keadaan cahaya. Selain itu, ia boleh mengendalikan gangguan angin luaran. Walaupun ia terganggu oleh kelajuan angin maksimum 4.5 meter sesaat, "Pulsar" masih boleh mengekalkan kedudukan melayang dalam julat yang kecil. Ciri-ciri ini menjadikan pesawat lebih selamat dan lebih stabil dalam persekitaran liar.
Penderia juga boleh meningkatkan medan pandangan melalui pergerakan putaran intrinsik, dengan itu meningkatkan keupayaan persepsi dron dan kecekapan misi, sebagai tambahan kepada keupayaan di atas. Pada masa ini terdapat dua kaedah utama yang digunakan untuk mengembangkan bidang pandangan penderia, dan ciri umumnya ialah penggunaan kuasa keseluruhan yang tinggi. Satu pendekatan yang mungkin adalah menggunakan penderia dengan medan pandangan yang besar, seperti kanta mata ikan, kamera reflektif atau lidar 360 darjah. Walau bagaimanapun, kamera mata ikan dan kamera pantulan diri sering mengalami ubah bentuk yang ketara, dan medan pandangan lidar 360 darjah dalam arah menegak masih sempit dan resolusinya rendah. Kaedah lain ialah menggunakan berbilang penderia secara serentak, seperti sistem berbilang kamera atau sistem berbilang lidar Walau bagaimanapun, sistem berbilang sensor akan membawa kos tambahan dan masa pemprosesan data yang lebih lama. Begitu juga, menggunakan sistem gimbal untuk meluaskan bidang pandangan juga akan membawa masalah yang sama.
Pasukan Dr. Zhang mendapati bahawa "Pulsar" boleh menjimatkan 26.7% penggunaan tenaga sambil mengekalkan fleksibiliti yang baik berbanding dengan dron quadcopter dengan luas bilah dan muatan yang sama. Sistem kuasa pulsar menggunakan penggerak tunggal untuk mencapai kecekapan penukaran tenaga yang lebih tinggi, dengan kecekapan keseluruhan sehingga 6.65 gram per watt. Dengan hanya kipas dengan diameter hanya 37.6 cm dan bateri kecil berkapasiti 41 watt jam, dron 1234 gram ini mencapai masa hover lebih daripada 12 minit. Jika lidar digantikan dengan kipas dan bateri yang lebih besar, masa hover "Pulsar" boleh dilanjutkan kepada lebih daripada 40 minit.
Hasil penyelidikan telah diterbitkan dalam Science Robotics. Artikel itu bertajuk "UAV berputar sendiri, satu-gerakan dengan medan pandangan sensor lanjutan untuk navigasi autonomi" dan diterbitkan dalam gambar halaman utama Laman Web Sains.
Dr. Zhang berkata bahawa platform penyelidikan yang ditubuhkan oleh pasukannya adalah kondusif untuk penyelidikan yang lebih mendalam mengenai dron berputar “Kami percaya bahawa penubuhan platform ini akan memberi manfaat untuk meneroka kaedah kawalan dron di bawah kelajuan tinggi. putaran dan kawalan dron di bawah gerakan ganas.” Teknologi Penyetempatan dan Pemetaan (SLAM)”
.Atas ialah kandungan terperinci Artifak spelunking? Dron pusingan sendiri pemutar tunggal dengan navigasi autonomi, lebih cekap!. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

Video Face Swap
Tukar muka dalam mana-mana video dengan mudah menggunakan alat tukar muka AI percuma kami!

Artikel Panas
Alat panas

Notepad++7.3.1
Editor kod yang mudah digunakan dan percuma

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

Hantar Studio 13.0.1
Persekitaran pembangunan bersepadu PHP yang berkuasa

Dreamweaver CS6
Alat pembangunan web visual

SublimeText3 versi Mac
Perisian penyuntingan kod peringkat Tuhan (SublimeText3)
Topik panas
 1393
1393
 52
1207
24
52
1207
24

 Kedudukan dron DJI 2024: Setiap model mempunyai jualan 50,000+, yang manakah telah anda gunakan?
Dec 16, 2023 pm 05:33 PM
Kedudukan dron DJI 2024: Setiap model mempunyai jualan 50,000+, yang manakah telah anda gunakan?
Dec 16, 2023 pm 05:33 PM
Hello, hello! Saya Yuan Haha, sila ambil perhatian, kandungan yang lebih menarik menanti anda Dengan kemajuan berterusan teknologi dron, kini kami boleh membeli salah satu kamera 4K yang paling penting dan boleh dipercayai dalam bajet beberapa ribu yuan kali Tidak dapat dibayangkan tahun lalu. Dengan usaha berterusan DJI, Autel dan syarikat lain, impian ini telah menjadi kenyataan Drone keseluruhan pilihan ialah DJI Mavic 3 Pro Drone ini bukan sahaja menyediakan rakaman definisi ultra tinggi, tetapi juga mempunyai kadar bingkai yang sangat baik dan panjang. hayat bateri yang berkekalan. Selain pengalaman peribadi saya, saya telah menyusun beberapa dron teratas lain untuk anda pilih berdasarkan ulasan positif di seluruh web. Sekarang, mari kita lihat pilihan menarik Drone Terbaik Keseluruhan: DJIMavic 3Pr
 Drone swarms: Teknologi mengubah permainan untuk aplikasi pertahanan
Nov 14, 2023 pm 08:53 PM
Drone swarms: Teknologi mengubah permainan untuk aplikasi pertahanan
Nov 14, 2023 pm 08:53 PM
Abstrak: Swarming ialah teknologi yang mengganggu, mengubah permainan yang melibatkan penggunaan kerjasama berbilang sistem tanpa pemandu dalam berbilang domain (darat, laut, udara, angkasa). Perkembangan dalam mikroelektronik baharu, panduan, navigasi, penderia dan teknologi kecerdasan buatan membolehkan mikro-drone kos rendah melaksanakan misi yang mencabar. Apabila digabungkan dengan proses membuat keputusan baru, penjejakan sasaran, teknologi komunikasi dan algoritma, kawanan boleh memberi impak yang besar di medan perang. Ia juga boleh digunakan untuk menyediakan keupayaan pengawasan berterusan dan tidak dapat dikesan serta keupayaan pertahanan kritikal, seperti memintas peluru berpandu jelajah. Artikel ini menerangkan aktiviti penyelidikan Eropah dalam bidang berkerumun dan menyelidiki implikasi penting yang mungkin ada untuk pertahanan. Kata kunci: UAV, keupayaan autonomi, penjejakan sasaran,
 Pesawat pengangkut tanpa pemandu terbesar yang dihasilkan dalam negara berjaya membuat penerbangan sulungnya: dilengkapi dengan enjin AEP100-A China Aviation Engineering Group
Aug 23, 2024 am 07:32 AM
Pesawat pengangkut tanpa pemandu terbesar yang dihasilkan dalam negara berjaya membuat penerbangan sulungnya: dilengkapi dengan enjin AEP100-A China Aviation Engineering Group
Aug 23, 2024 am 07:32 AM
Menurut berita dari laman web ini pada 22 Ogos, China Aviation Engine Group Co., Ltd. mengeluarkan pengumuman rasmi hari ini Pada 6:28 hari ini, enjin turboprop 900 kilowatt AEP100-A, yang dibangunkan sepenuhnya oleh Industri Penerbangan China. Corporation, menggerakkan pesawat pengangkut tanpa pemandu besar SA750U di Shaanxi, penerbangan pertama yang berjaya. Menurut laporan, enjin turboprop AEP100-A direka oleh Institut Penyelidikan Kejuruteraan Aeroangkasa China dan dihasilkan di Selatan Ia mempunyai keupayaan untuk menyesuaikan diri dengan suhu tinggi dan dataran tinggi Ia menggunakan reka bentuk aerodinamik tiga dimensi dan teknologi reka bentuk unit kuasa untuk pesawat sambil meningkatkan penjimatan bahan api Meningkatkan kecekapan operasi pesawat secara keseluruhan. Siri enjin turboprop AEP100 boleh dilengkapi dengan 2 hingga 6 tan pesawat tujuan am atau 3 hingga 10 tan kenderaan udara tanpa pemandu, dan prestasi komprehensifnya telah mencapai tahap lanjutan antarabangsa pada tahap yang sama dalam perkhidmatan. Laman web ini dilaporkan sebelum ini
 pesawat pengangkut tanpa pemandu berskala besar pertama negara saya dengan muatan melebihi 3 tan, 'SA750U', berjaya melakukan penerbangan sulungnya, dengan sistem dan bahan yang dikeluarkan secara nasional
Aug 23, 2024 am 07:31 AM
pesawat pengangkut tanpa pemandu berskala besar pertama negara saya dengan muatan melebihi 3 tan, 'SA750U', berjaya melakukan penerbangan sulungnya, dengan sistem dan bahan yang dikeluarkan secara nasional
Aug 23, 2024 am 07:31 AM
Menurut berita dari laman web ini pada 22 Ogos, menurut akaun awam rasmi "Shanhe Huayu", pada 6:28 hari ini, pesawat pengangkut tanpa pemandu besar SA750U dibangunkan secara bebas oleh Sunward Huayu Aviation Technology dan disiapkan oleh penyelarasan strategik Sunward Star Syarikat penerbangan terbang dari Jingbian, Xi'an Pusat ujian dron eksperimen berjaya membuat penerbangan pertamanya. ▲Sumber gambar akaun awam rasmi "Shanhe Huayu", sama seperti di bawah menurut laporan, semasa ujian penerbangan selama 40 minit, semua peralatan sistem pesawat berfungsi dengan normal dan berada dalam keadaan baik prestasi memenuhi spesifikasi reka bentuk Selepas menyelesaikan subjek penerbangan yang dijadualkan Selepas itu, pesawat kembali lancar dan penerbangan pertama berjaya. SA750U ialah pesawat pengangkut tanpa pemandu berskala besar pertama di negara saya dengan muatan lebih 3 tan. Syarikat Shanhe Huayu hanya mengambil masa 2 tahun 8 bulan untuk menyelesaikan keseluruhan proses daripada reka bentuk konsep hingga penerbangan pertama yang berjaya bagi pesawat pertama.
 UAV Wing Loong terbang semula ke langit dan menjadi stesen pangkalan udara di Gansu
Dec 21, 2023 am 08:13 AM
UAV Wing Loong terbang semula ke langit dan menjadi stesen pangkalan udara di Gansu
Dec 21, 2023 am 08:13 AM
Dron Wing Loong-2H sekali lagi pergi ke Daerah Jishishan, Wilayah Gansu untuk melaksanakan tugas bantuan bencana seperti peninjauan bencana dan sokongan komunikasi kecemasan. Jenis dron ini dipanggil "stesen pangkalan udara" dan boleh memulihkan rangkaian isyarat rangkaian awam China Mobile, China Unicom dan Telecom secara berterusan, memulihkan komunikasi rangkaian awam seluas 50 kilometer persegi secara berterusan, dan mewujudkan rangkaian komunikasi audio dan video yang meliputi 15,000 kilometer persegi. Wing Loong-2H beraksi dengan baik dalam penyelamatan bencana hujan lebat 2021 di Zhengzhou, Henan dan gempa bumi Luding 2022 di Sichuan, dan berjaya menyelesaikan misi Sumber asal: CCTV Military Weibo
 Drone siri Wing Loong Domestik: menulis bab baharu dalam aplikasi berbilang medan, meliputi banyak bidang seperti meteorologi, kecemasan dan keselamatan
Dec 01, 2023 pm 05:47 PM
Drone siri Wing Loong Domestik: menulis bab baharu dalam aplikasi berbilang medan, meliputi banyak bidang seperti meteorologi, kecemasan dan keselamatan
Dec 01, 2023 pm 05:47 PM
Menurut Science and Technology Daily, pada 28 November, di tapak AVIC UAV di Zigong, Sichuan, Perbadanan Industri Penerbangan China mengadakan acara hari terbuka dengan tema "Naga Bersayap Kuasa Besar Mengembara Dunia" secara menyeluruh memaparkan dron berskala besar yang dihasilkan dalam negara Pencapaian pembangunan dalam pembangunan dron mewah dan pembinaan perindustrian. Selepas lebih daripada sepuluh tahun pembangunan, siri produk UAV "Pterosaur" yang dihasilkan dalam negara yang dibangunkan secara bebas oleh AVIC UAV telah membentuk silsilah. Wing Loong-2 muncul pada hari terbuka perusahaan milik kerajaan itu dan melakukan demonstrasi penerbangan. Wing Loong-2 ialah sistem UAV pelbagai guna dengan ketinggian sederhana tinggi, tahan lama yang dibangunkan oleh industri penerbangan Ia mempunyai keupayaan melaksanakan misi sepanjang hari, sepanjang cuaca, seluruh wilayah dan pelbagai senario. Sistem UAV ini adalah sistem UAV berkuasa turboprop berskala besar pertama negara saya yang dihasilkan di negara saya Ia mempunyai susun atur aerodinamik, struktur badan,
 Panasonic akan mengeluarkan secara besar-besaran bateri keadaan pepejal untuk dron, mendakwa mengecas 80% dalam masa 3 minit
Sep 21, 2023 pm 08:21 PM
Panasonic akan mengeluarkan secara besar-besaran bateri keadaan pepejal untuk dron, mendakwa mengecas 80% dalam masa 3 minit
Sep 21, 2023 pm 08:21 PM
Panasonic Holdings mengumumkan pada 12 September bahawa ia merancang untuk memulakan pengeluaran besar-besaran bateri keadaan pepejal kecil yang sedang dibangunkan untuk aplikasi seperti dron pada separuh kedua tahun 2020-an (iaitu, 2025 hingga 2029). Menurut Nikkei Shimbun, Panasonic Holdings berkata jika ia boleh digunakan secara praktikal, ia dijangka dapat mengecas 80% daripada kapasiti bateri dron dalam masa kira-kira 3 minit. Berbanding dengan bateri litium-ion sedia ada yang mengambil masa kira-kira sejam untuk mengecas, kemudahan akan dipertingkatkan dengan ketara. Panasonic Holdings mendedahkan demonstrasi teknologinya kepada media dan syarikat pelanggan buat kali pertama dan memperkenalkan bateri keadaan pepejal. Walaupun butiran seperti komposisi bahan logam belum diumumkan, pegawai berkata ia dijangka dapat mengecas dan menyahcas berpuluh-puluh ribu kali, yang jauh melebihi kira-kira 3,000 kali pengecasan dan pelepasan litium-ion biasa. bateri. Bateri semua keadaan pepejal sebagai sandaran bateri kenderaan generasi baharu
 China Mobile: Penerbangan ujian pertama penghantaran kopi dron berjaya
Jun 01, 2024 pm 12:30 PM
China Mobile: Penerbangan ujian pertama penghantaran kopi dron berjaya
Jun 01, 2024 pm 12:30 PM
Terima kasih kepada netizen En. Aviation atas penyerahan petunjuk! Menurut berita pada 29 Mei, China Mobile mengumumkan bahawa penghantaran kopi dron yang dibina bersama oleh China Mobile dan Chengdu Tianfu New Area Investment Group berjaya menyelesaikan penerbangan ujian pertamanya. ▲Pulau Chengdu Kechuang, dron enam pemutar sedang "menunggu pesanan" di tempat berlepas Kami mengetahui dari Chengdu Tiantou bahawa kelajuan penerbangan dron logistik ialah 15 meter/saat, yang bermaksud ia boleh mencapai 900 meter. satu minit Dengan kapasiti muatan kurang daripada 4.5 kilogram, penghantaran logistik sehala biasanya boleh diselesaikan dalam masa 10 minit. Pada masa ini, laluan penghantaran dron Pulau Ekologi Chengdu Kechuang dirancang dari Dewan 1 hingga W7, dan kemudiannya akan meliputi seluruh pulau dan kawasan panas di sekitar Tasik Xinglong. ▲Selepas menerima tempahan, barista meletakkan minuman ke dalam "gudang pengangkutan" dron Berbeza dengan dron lain, dron logistik dikendalikan oleh latar belakang dan tidak memerlukan kakitangan khusus.
