

Biarkan anjing robot mempelajari data pergerakan anjing sebenar, ia akan benar-benar berasa seperti dua anjing!
Ia melompat halangan dengan mudah, dan "pemilik" di belakangnya hampir tidak dapat bersaing:
Menggerudi " dog hole" agak mudah. :
Anda juga boleh mempunyai dua ekor anjing bergembira bersama, satu mengejar dan satu lagi melarikan diri...
Ini ialah kemajuan terkini Anjing Robot Kilang Angsa.
Menggunakan model pra-latihan untuk memberi makan kepada anjing robot data pergerakan anjing sebenar dan melalui pembelajaran pengukuhan, anjing robot Max bukan sahaja lebih tangkas dalam tingkah laku, tetapi juga boleh menyesuaikan diri berdasarkan kemahiran yang dimilikinya. dikuasai. Persekitaran yang lebih kompleks.
Ringkasnya, ia agak doggy di dalam dan luar.

Antara kemahiran baharu yang dipelajari anjing robot kali ini, yang paling kuat ialah bermain permainan.
Anjing robot bukan sahaja boleh mengikut peraturan, tetapi juga menghasilkan strategi sendiri untuk memenangi permainan, yang mungkin lebih bijak daripada anjing sebenar.
Secara khusus, ini ialah permainan mengejar halangan, diilhamkan oleh "World Chase Tag", dengan peraturan berikut:
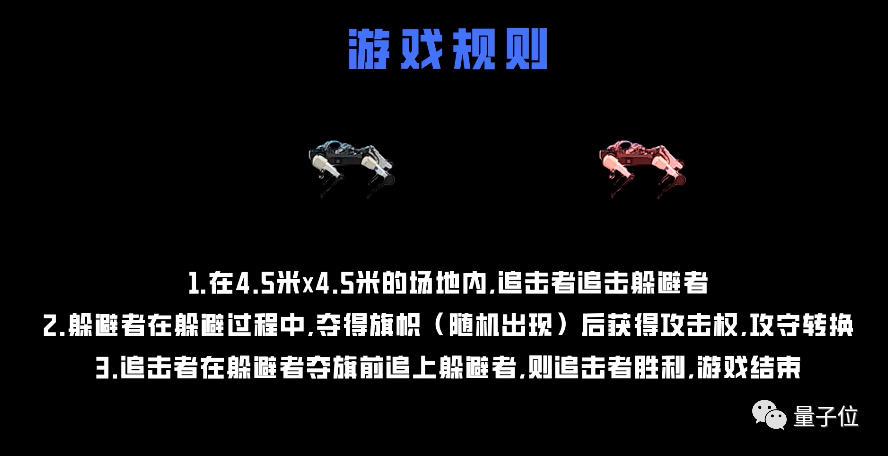
Para penyelidik menetapkan kesukaran permainan yang berbeza , yang paling mudah ialah medan terbuka:

Semasa permainan, anjing robot itu jelas mempunyai strategi.
Sebagai contoh, biasanya pengejar akan melancarkan serangan sengit sehingga pengelak jauh dari bendera catur, memaksanya ke sudut buta, dan permainan berakhir.
Jika pengejar mendapati pengelak itu sangat hampir dengan bendera dan tidak mempunyai peluang untuk mengejarnya, ia akan berhenti mengejar pertama dan tunggu yang seterusnya Bendera muncul:
Tidak kisah jika ada halangan, kedua-dua anjing itu bermain sama baik 6:
Tetapi mereka boleh beraksi seperti ini, dan Bukan anjing robot telah dilatih dengan permainan ini dari awal.
Ia sebenarnya berdasarkan beberapa tindakan, pengetahuan dan kemahiran yang telah anda pelajari untuk menangani senario permainan ini.
Bagaimana untuk melaksanakannya secara khusus? Tengok bawah.
Penyelidikan dibahagikan kepada tiga peringkat.
The peringkat pertama ialah menggunakan sistem tangkapan gerakan yang biasa digunakan dalam permainan untuk mengumpul data postur anjing sebenar, termasuk berjalan, berlari, melompat, berdiri dan tindakan lain, dan membina tugas pembelajaran tiruan dalam simulator.
Maklumat dalam data ini kemudiannya diabstrak dan dimampatkan ke dalam model rangkaian saraf dalam, supaya ia bukan sahaja meliputi maklumat postur gerakan, tetapi juga mempunyai kebolehtafsiran tertentu. Tencent RoboticsX Robotics Laboratory bekerjasama dengan Tencent Games untuk menggunakan teknologi permainan untuk meningkatkan ketepatan dan kecekapan enjin simulasi Pada masa yang sama, ia telah mengumpul pelbagai bahan tangkapan gerakan semasa proses pengeluaran dan pembangunan permainan .
 Semasa proses pembelajaran tiruan, rangkaian saraf hanya menerima
Semasa proses pembelajaran tiruan, rangkaian saraf hanya menerima
Dalam langkah seterusnya, model memperkenalkan data deria daripada persekitaran sekeliling, seperti halangan di bawah kaki yang "dilihat" melalui penderia lain.
Pada peringkat kedua, melalui parameter rangkaian tambahan, postur haiwan yang dikuasai pada peringkat pertama dihubungkan dengan persepsi luaran.
Dengan cara ini, anjing robot boleh bertindak balas terhadap persekitaran luaran melalui tindakan yang telah dipelajarinya.
Apabila robot boleh menyesuaikan diri dengan pelbagai persekitaran yang kompleks, pengetahuan yang menghubungkan postur haiwan dengan persepsi luaran juga akan diperkukuh dan disimpan dalam struktur rangkaian saraf.
Kemudian anjing robot itu boleh menaiki tangga dengan bebas.
Atau berjalan di atas tanah yang tidak selanjar atau tidak rata:
Kemudian sampai ke peringkat akhir, di mana anjing robot dibenarkan menyelesaikan masalah praktikal berdasarkan kemahiran yang dipelajari di atas
iaitu proses membuat permainan yang dinyatakan di atas.
Menurut laporan, semua strategi kawalan anjing robot dalam permainan adalah strategi rangkaian saraf.
Belajar dalam simulasi dan biarkan rangkaian saraf mensimulasikan penaakulan manusia melalui pemindahan sifar pukulan untuk mengenal pasti perkara baharu yang belum pernah dilihat sebelum ini, dan Pengetahuan ini digunakan pada robot sebenar.
Contohnya, jika anda telah belajar bagaimana untuk mengelakkan halangan dalam model pra-latihan, maka jika anda menyediakan halangan dalam permainan, anjing robot boleh menanganinya dengan mudah.
Kemajuan penyelidikan baharu ini dibawakan oleh Tencent Robotics X Robotics Laboratory.
Percubaan telah ditubuhkan pada 2018. Projek robot yang dilancarkan pada masa ini termasuk anjing robot generasi pertama/kedua Max, anjing robot Jamoca, robot beroda Ollie, motosikal autonomi pengimbangan diri, dsb.
Perlu dinyatakan bahawa sarjana di UC Berkeley juga menggunakan kaedah latihan "anjing sebenar" pada anjing robot.
Pieter Abbeel, murid pengasas Ng, dan yang lain membiarkan anjing robot itu berguling di atas tanah selama sejam dan belajar berjalan.
Apabila Tencent mengeluarkan generasi kedua anjing robot Max tahun lepas, dalam satu berita kecil, anjing itu boleh "menampar kakinya" dan " berlari dengan gembira". Ia mempunyai bau kanak-kanak berbulu di rumah.
(Sudah tentu, jika anda mahu ia menjadi anjing yang mendengar kata-kata pemiliknya, anda boleh memberinya pesanan melalui arahan.)

Apa yang kami katakan ialah hala tuju pembangunan anjing robot semasa bukanlah untuk melakukan jungkir balik, tetapi untuk bersaing dengan anjing sebenar untuk mendapatkan pekerjaan?
Atas ialah kandungan terperinci Anjing robot Goose Factory mengambil alih 'pekerjaan' anjing sebenar! Dia boleh bermain permainan dan bermain permainan dengan gembira, dan dia juga boleh berjalan orang sekitar 6. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!
 Bagaimana untuk mengikat data dalam senarai lungsur
Bagaimana untuk mengikat data dalam senarai lungsur
 Perbezaan antara indeks dan termasuk
Perbezaan antara indeks dan termasuk
 Tujuan utama sistem fail
Tujuan utama sistem fail
 Apakah kaedah untuk menukar IP dalam vps dinamik serta-merta?
Apakah kaedah untuk menukar IP dalam vps dinamik serta-merta?
 Apakah carian sorotan?
Apakah carian sorotan?
 Bagaimana untuk menyambung ke pangkalan data menggunakan vb
Bagaimana untuk menyambung ke pangkalan data menggunakan vb
 Perbezaan antara executeupdate dan execute
Perbezaan antara executeupdate dan execute
 masukkan ke dalam pilih
masukkan ke dalam pilih
 Versi sistem linux yang manakah mudah digunakan?
Versi sistem linux yang manakah mudah digunakan?








![[Web front-end] Permulaan pantas Node.js](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



