
 pembangunan bahagian belakang
tutorial php
PHP merealisasikan teknologi kawalan robot masa nyata
pembangunan bahagian belakang
tutorial php
PHP merealisasikan teknologi kawalan robot masa nyata
PHP merealisasikan teknologi kawalan robot masa nyata

Dengan perkembangan teknologi komputer, teknologi robotik telah digunakan dan dibangunkan secara meluas. Kawalan robot adalah bahagian yang sangat penting dalam teknologi robotik, dan menyedari kawalan robot masa nyata adalah bahagian pentingnya. Artikel ini akan memperkenalkan kaedah pelaksanaan teknologi kawalan robot masa nyata menggunakan PHP.
1. Pengenalan kepada teknologi kawalan robot
Teknologi kawalan robot ialah salah satu teknologi teras robot Ia merujuk kepada penggunaan komputer dan teknologi kawalan lain untuk mencapai tujuan dan tugas tertentu dengan memanipulasi pelbagai tindakan, pergerakan dan postur. robot. Tugas utama teknologi kawalan robot adalah untuk mencapai kawalan komprehensif robot supaya robot dapat menyelesaikan pelbagai tugas dalam persekitaran yang berbeza.
Teknologi kawalan robot merangkumi dua kaedah: kawalan luar talian dan kawalan dalam talian. Kawalan luar talian merujuk kepada pra-pengaturcaraan trajektori gerakan robot, menjana arahan kawalan robot di luar talian, dan kemudian menghantar arahan kepada robot melalui komunikasi untuk menyelesaikan tugas pengendalian tertentu. Kawalan dalam talian merujuk kepada pemantauan status dan persekitaran robot melalui penderia masa nyata dan melaraskan tindakan dan pergerakan robot secara dinamik supaya ia dapat menyelesaikan pelbagai tugas secara stabil.
2. PHP merealisasikan teknologi kawalan robot masa nyata
PHP ialah bahasa skrip yang digunakan secara meluas dalam pembangunan aplikasi rangkaian Ia mudah dipelajari dan mempunyai kecekapan pembangunan yang tinggi. Dalam bidang kawalan robot, menggunakan PHP untuk merealisasikan teknologi kawalan robot masa nyata juga mempunyai prospek aplikasi yang luas. Berikut menerangkan langkah-langkah untuk melaksanakan teknologi kawalan robot masa nyata menggunakan PHP:
- Mewujudkan sambungan komunikasi
Langkah pertama untuk melaksanakan teknologi kawalan robot masa nyata ialah mewujudkan sambungan komunikasi antara robot dan hos kawalan. Secara amnya, sambungan komunikasi direalisasikan melalui LAN wayarles atau LAN berwayar. Secara khusus, sambungan komunikasi wayarles boleh diwujudkan melalui komponen seperti modul Wi-Fi atau modul Bluetooth, atau sambungan komunikasi berwayar boleh diwujudkan menggunakan antara muka Ethernet atau port bersiri.
- Algoritma kawalan reka bentuk
Selepas mewujudkan sambungan komunikasi, anda perlu membangunkan algoritma kawalan untuk menentukan cara robot harus bergerak. Biasanya, algoritma kawalan robot masa nyata dibahagikan kepada dua kategori, satu berdasarkan algoritma kawalan PID, dan satu lagi berdasarkan algoritma kawalan ramalan model. Untuk membangunkan algoritma kawalan, anda boleh menggunakan pakej perisian yang berkaitan atau perpustakaan luaran pada platform PHP, seperti Matlab, dsb.
- Tulis program kawalan
Tulis program kawalan robot berasaskan PHP untuk mengawal tindakan dan pergerakan robot. Program kawalan boleh dijalankan pada hos kawalan dan menghantar arahan kawalan melalui sambungan komunikasi yang diwujudkan dengan robot untuk mencapai kawalan masa nyata pergerakan dan tindakan robot. Sebelum menulis program kawalan, anda perlu memahami sepenuhnya algoritma kawalan dan perkakasan robot untuk memastikan ketepatan dan kepraktisan program.
- Pemantauan masa nyata status robot
Gunakan penderia dan peralatan pengesanan untuk memantau status dan persekitaran robot dalam masa nyata, termasuk kedudukan, kelajuan, sikap dan maklumat lain robot. Dengan memantau data, pergerakan dan tindakan robot boleh dilaraskan dan diperbetulkan dalam masa nyata untuk memastikan kestabilan dan keselamatan robot, sambil meningkatkan kecekapan dan ketepatan penyiapan tugas robot.
- Paparan visualisasi data
Memaparkan status robot yang dipantau dalam bentuk carta, grafik atau realiti maya, supaya pengendali dapat memahami status dan persekitaran robot dalam masa nyata, serta melaraskan serta membetulkan pergerakan dan tindakan robot . Pada masa yang sama, paparan visualisasi data juga boleh digunakan sebagai salah satu fungsi penting sistem kawalan robot untuk memudahkan analisis dan pelarasan data seterusnya oleh pengguna.
Ringkasan
PHP Teknologi kawalan robot masa nyata ialah salah satu aplikasi penting kawalan robot Ia boleh meningkatkan ketepatan dan kecekapan pergerakan robot dengan berkesan, dan juga memberikan sokongan kuat untuk autonomi dan kecerdasan robot. Dalam proses merealisasikan teknologi kawalan robot masa nyata, adalah perlu untuk memberikan permainan sepenuhnya kepada kelebihan PHP dan menggabungkannya dengan teknologi lain yang berkaitan untuk membangun dan melaksanakan sistem untuk menyumbang kepada pembangunan teknologi kawalan robot.
Atas ialah kandungan terperinci PHP merealisasikan teknologi kawalan robot masa nyata. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

AI Hentai Generator
Menjana ai hentai secara percuma.

Artikel Panas
Alat panas

Notepad++7.3.1
Editor kod yang mudah digunakan dan percuma

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

Hantar Studio 13.0.1
Persekitaran pembangunan bersepadu PHP yang berkuasa

Dreamweaver CS6
Alat pembangunan web visual

SublimeText3 versi Mac
Perisian penyuntingan kod peringkat Tuhan (SublimeText3)
Topik panas
 1374
1374
 52
52

 Panduan Pemasangan dan Naik Taraf PHP 8.4 untuk Ubuntu dan Debian
Dec 24, 2024 pm 04:42 PM
Panduan Pemasangan dan Naik Taraf PHP 8.4 untuk Ubuntu dan Debian
Dec 24, 2024 pm 04:42 PM
PHP 8.4 membawa beberapa ciri baharu, peningkatan keselamatan dan peningkatan prestasi dengan jumlah penamatan dan penyingkiran ciri yang sihat. Panduan ini menerangkan cara memasang PHP 8.4 atau naik taraf kepada PHP 8.4 pada Ubuntu, Debian, atau terbitan mereka
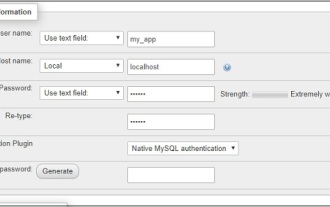 CakePHP Bekerja dengan Pangkalan Data
Sep 10, 2024 pm 05:25 PM
CakePHP Bekerja dengan Pangkalan Data
Sep 10, 2024 pm 05:25 PM
Bekerja dengan pangkalan data dalam CakePHP adalah sangat mudah. Kami akan memahami operasi CRUD (Buat, Baca, Kemas Kini, Padam) dalam bab ini.
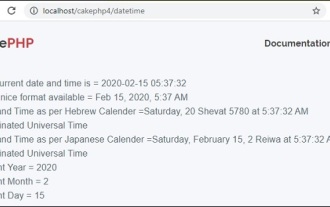 Tarikh dan Masa CakePHP
Sep 10, 2024 pm 05:27 PM
Tarikh dan Masa CakePHP
Sep 10, 2024 pm 05:27 PM
Untuk bekerja dengan tarikh dan masa dalam cakephp4, kami akan menggunakan kelas FrozenTime yang tersedia.
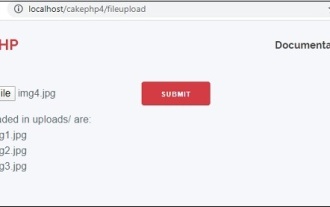 Muat naik Fail CakePHP
Sep 10, 2024 pm 05:27 PM
Muat naik Fail CakePHP
Sep 10, 2024 pm 05:27 PM
Untuk mengusahakan muat naik fail, kami akan menggunakan pembantu borang. Di sini, adalah contoh untuk muat naik fail.
 Penghalaan CakePHP
Sep 10, 2024 pm 05:25 PM
Penghalaan CakePHP
Sep 10, 2024 pm 05:25 PM
Dalam bab ini, kita akan mempelajari topik berikut yang berkaitan dengan penghalaan ?
 Bincangkan CakePHP
Sep 10, 2024 pm 05:28 PM
Bincangkan CakePHP
Sep 10, 2024 pm 05:28 PM
CakePHP ialah rangka kerja sumber terbuka untuk PHP. Ia bertujuan untuk menjadikan pembangunan, penggunaan dan penyelenggaraan aplikasi lebih mudah. CakePHP adalah berdasarkan seni bina seperti MVC yang berkuasa dan mudah difahami. Model, Pandangan dan Pengawal gu
 Pengesah Mencipta CakePHP
Sep 10, 2024 pm 05:26 PM
Pengesah Mencipta CakePHP
Sep 10, 2024 pm 05:26 PM
Pengesah boleh dibuat dengan menambah dua baris berikut dalam pengawal.
 Pembalakan CakePHP
Sep 10, 2024 pm 05:26 PM
Pembalakan CakePHP
Sep 10, 2024 pm 05:26 PM
Log masuk CakePHP adalah tugas yang sangat mudah. Anda hanya perlu menggunakan satu fungsi. Anda boleh log ralat, pengecualian, aktiviti pengguna, tindakan yang diambil oleh pengguna, untuk sebarang proses latar belakang seperti cronjob. Mengelog data dalam CakePHP adalah mudah. Fungsi log() disediakan
