
 Peranti teknologi
AI
Penjelasan terperinci tentang pengelakan halangan, perancangan laluan dan teknologi kawalan untuk kenderaan autonomi
Peranti teknologi
AI
Penjelasan terperinci tentang pengelakan halangan, perancangan laluan dan teknologi kawalan untuk kenderaan autonomi
Penjelasan terperinci tentang pengelakan halangan, perancangan laluan dan teknologi kawalan untuk kenderaan autonomi

1 Pengenalan
Sistem pengangkutan pintar menyelesaikan isu autonomi dan keselamatan yang mencabar dalam persekitaran yang kompleks, jadi ia menarik perhatian khusus daripada penyelidik. Modul utama konsep kenderaan autonomi ialah persepsi, perancangan dan kawalan.
Sebenarnya, persepsi terdiri daripada pemodelan persekitaran dan penyetempatan. Mereka bergantung pada penderia luaran dan badan masing-masing. Seterusnya, perancangan bertujuan untuk menjana trajektori yang optimum berdasarkan maklumat yang disampaikan oleh hasil penderiaan untuk sampai ke destinasi tertentu. Akhir sekali, modul kawalan didedikasikan untuk menjejak trajektori yang dihasilkan dengan mengarahkan penggerak kenderaan.
Artikel ini akan memperkenalkan setiap modul proses untuk situasi khusus untuk mengelakkan halangan. Penyepaduan tugas-tugas ini dalam seni bina global adalah sumbangan utama kertas ini. Modul persepsi memastikan bahawa persekitaran diterangkan berdasarkan perwakilan grid yang tepat. Penggunaan Peta Grid Pendudukan (OGM) amat sesuai untuk mengelak halangan, kerana ia boleh mengenal pasti ruang yang boleh dipandu dan mengesan objek statik dan dinamik di tempat kejadian. Pose objek yang perlu dielakkan kemudiannya digunakan pada peringkat perancangan laluan, yang menjana trajektori dan profil halaju berdasarkan fungsi parameter sigmoid dan ufuk bergolek yang ditunjukkan dalam [1]. Profil kelengkungan yang diperolehi dianggap sebagai laluan rujukan untuk membimbing modul kawalan. Tahap ini menyediakan kenderaan dengan sudut stereng yang sesuai berdasarkan pengawal bimbingan sisi yang menggunakan pusat impak (CoP) dan bukannya pusat graviti klasik. Pengawal yang dicadangkan adalah berdasarkan tindakan maklum balas keadaan ke hadapan dan teguh untuk mengurangkan kesan gangguan pada ralat sisi dan memastikan kestabilan sisi, masing-masing [2].
Kertas kerja ini disusun seperti berikut: Bahagian II membentangkan pendekatan global, yang mengandungi modul berbeza yang akan dilaksanakan untuk mengelakkan halangan. Bahagian ketiga memperkenalkan kaedah pengesanan objek dinamik berdasarkan penghunian grid keyakinan. Bahagian 4 menerangkan algoritma pengelakan halangan berdasarkan fungsi sigmoid berparameter dan ufuk bergolek. Bahagian 5 memperincikan reka bentuk pengawal berdasarkan gandingan suapan hadapan kepada maklum balas keadaan yang mantap. Bahagian 6 menerangkan platform eksperimen dan keputusan kaedah eksperimen ini. Akhir sekali, Bahagian 7 menyimpulkan kertas kerja.
2 Strategi Mengelak Halangan
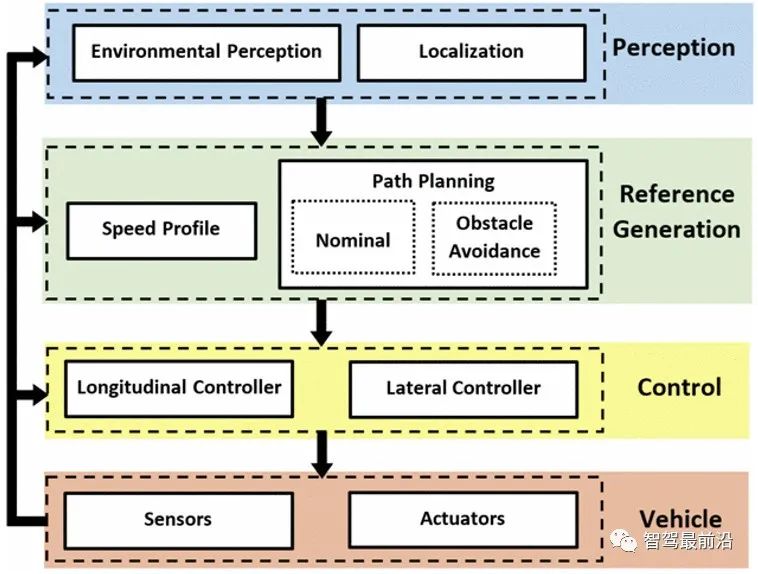
Bahagian ini memperkenalkan tajuk strategi mengelak halangan global berdasarkan tiga modul, seperti yang ditunjukkan dalam Rajah 1. Bahagian ini memperkenalkan secara ringkas setiap peringkat.
 Pictures
Pictures
Rajah 1 Strategi Penghindaran Halangan
A. Penyelidikan ini tertumpu terutamanya pada persepsi persekitaran untuk mengekstrak lokasi objek statik/dinamik dan laluan boleh pandu berdasarkan penderia penderiaan luaran. Kedudukan kenderaan dianggap diketahui dan boleh dipercayai. Salah satu kaedah yang paling biasa untuk mengekstrak maklumat tentang jalan raya dan objek sekitar ialah "Grid Penghunian" (OG). Ia boleh digunakan dalam pelbagai aplikasi seperti pengelakan perlanggaran, gabungan sensor, pengesanan sasaran, dan penyetempatan dan pemetaan serentak (SLAM) [3]. Idea asas OG adalah untuk mewakili graf persekitaran sebagai medan jarak seragam pembolehubah rawak binari, setiap pembolehubah mewakili sama ada terdapat halangan di lokasi tersebut dalam persekitaran [4]. Ia boleh dijana daripada pelbagai bentuk untuk mengendalikan pengukuran sensor yang bising dan tidak pasti memandangkan sikap kenderaan yang diketahui. Dalam makalah ini, OG ditakrifkan oleh teori kepercayaan yang dicadangkan oleh Dempster dan Shafer [5][6] kerana ia memodelkan bahagian ketidakpastian, ketidaktepatan dan tidak diketahui dan juga membenarkan mengurus konflik dalam gabungan data. Bahagian 3 memberikan butiran lanjut.
B. Modul penjanaan trajektori rujukan
Modul ini khusus untuk menentukan trajektori dan lengkung kelajuan yang sepadan untuk diikuti oleh kenderaan. Perancang menerima kawasan boleh dipandu dan lokasi halangan daripada modul persepsi. Berdasarkan maklumat ini, trajektori geometri dan lengkung halaju boleh dijana. Artikel ini memfokuskan pada strategi perancangan laluan. Bahagian ini bertujuan untuk menyediakan trajektori nominal dari titik mula ke titik akhir berdasarkan kawasan yang boleh dipandu.
Apabila halangan dikesan, trajektori kedua (trajektori mengelak halangan) dikira untuk memastikan keselamatan dan keselesaan penumpang kenderaan autonomi, dan ditambah pada trajektori nominal selepas mengelak. Trajektori pengelakan ini boleh diperolehi oleh perancangan tempatan kerana ia hanya melibatkan sebahagian kecil daripada trajektori nominal. Untuk mengurangkan kos pengiraan algoritma penjanaan trajektori, kaedah rolling horizon diguna pakai, seperti yang diterangkan dalam [1], yang kerjanya dilanjutkan dalam kertas ini, lihat Bahagian IV. Trajektori ini (penghindaran nominal dan halangan) kemudiannya boleh dianggap sebagai rujukan untuk modul kawalan (terutamanya pengawal sisi).
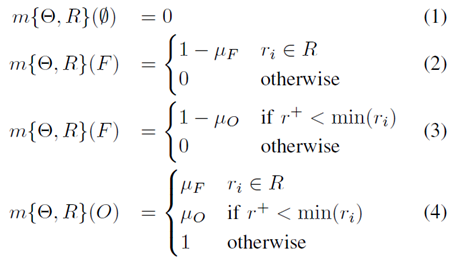
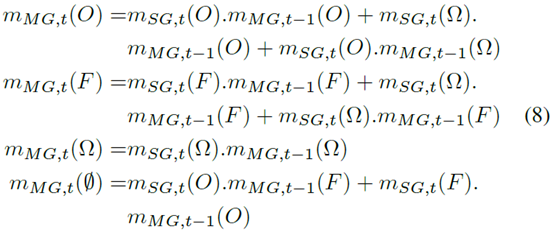
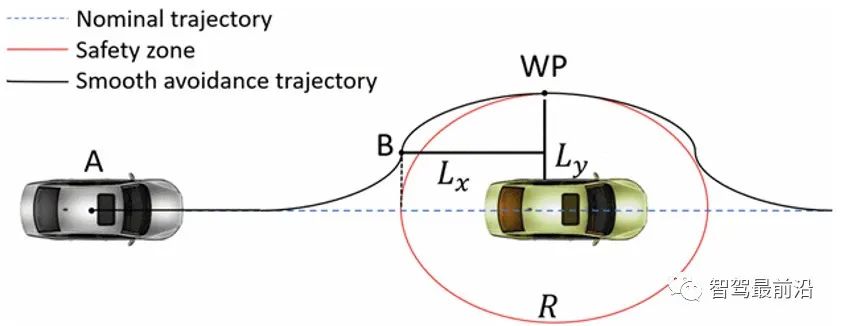
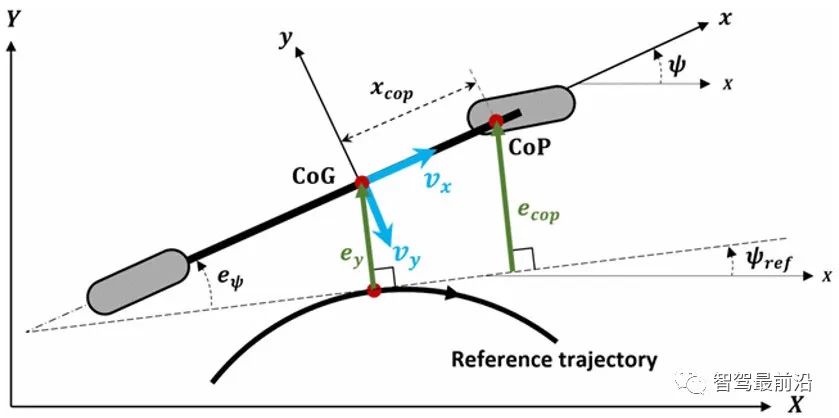
C Modul kawalan terdiri daripada dua bahagian utama: pengawal membujur dan sisi, memastikan kawalan pemanduan automatik. Tumpuan utama di sini adalah pada pengawal sisi untuk mengendalikan pengelakan halangan. Malah, sudut stereng yang sesuai disediakan oleh pengawal sisi untuk mengikut laluan yang dikehendaki yang diberikan oleh modul penjanaan rujukan. Penjejakan laluan yang dikehendaki boleh dicapai dengan mengurangkan dua ralat penjejakan, iaitu ralat sisi dan ralat pengepala. Antara strategi bimbingan sisi geometri dan dinamik yang terdapat dalam kesusasteraan [7], pendekatan dinamik berdasarkan Pusat Perlanggaran (CoP) diguna pakai di sini [8]. Pilihan bergantung pada prestasi kaedah kawalan ini. CoP ialah titik geometri yang terletak di hadapan pusat graviti (CoG) kenderaan yang meramalkan ralat kedudukan sisi. Seseorang kemudiannya boleh mengharapkan penjejakan trajektori yang lebih baik. Sebaliknya, kerana gerakan CoP dipisahkan daripada daya sisi tayar belakang [9], seperti yang ditunjukkan dalam Bahagian V, persamaan dinamik sisi menjadi kurang kompleks. OG ialah perwakilan yang membahagikan ruang secara berbilang dimensi kepada unit, dan setiap unit menyimpan pengetahuan tentang status penghuniannya [4]. Hari ini, OG banyak digunakan kerana sumber yang lebih berkuasa tersedia untuk mengendalikan kerumitan pengiraannya. Pembinaan jerat telah digunakan dalam pelbagai dimensi (2D, 2.5D dan 3D) [10], di mana setiap keadaan sel diterangkan mengikut bentuk yang dipilih. Yang paling biasa ialah rangka kerja Bayesian, yang pertama kali diterima pakai oleh Elfes [4] dan kemudiannya menjalani banyak sambungan untuk menjadi Penapis Penghuni Bayesian (BOF) yang terkenal [11]. Karya lain mencadangkan formalisme berdasarkan teori Dempster-Shafer, juga dikenali sebagai teori bukti, yang diterangkan kemudiannya. A. Menggunakan teori kepercayaan Dikurangkan kepada teori kebarangkalian, teori kepercayaan menyediakan perwakilan yang mencukupi bagi kecacatan sumber dan oleh itu sesuai untuk persepsi dalam ITS. Ia menyediakan rangkaian luas pengendali gabungan yang boleh mengendalikan sifat-sifat ini bergantung pada aplikasi. Beberapa penyelidikan tentang membina OG menggunakan kerangka Kepercayaan boleh didapati dalam [12], [13]. Kerja ini berasal daripada penyelidikan [13], yang mencadangkan kaedah untuk pengesanan objek bergerak dan penentuan ruang boleh dipandu berdasarkan konflik yang terhasil. Untuk tujuan ini, bingkai pengenalan ditakrifkan untuk memasukkan status sel yang dianggap bebas (F) atau diduduki (O). Kotak pengecaman ialah Ω={F, O}. Rangka kerja set kuasa rujukan mengandungi semua kemungkinan gabungan andaian berikut: 2Ω= {∅,F,O,{F,O}}. Untuk menyatakan kepercayaan dalam setiap keadaan, fungsi jisim m(.) mewakili konflik m(∅), keadaan bebas m(F), keadaan diduduki m(O) dan keadaan tidak diketahui m({F,O }) masing-masing. B. Model Sensor Pada asasnya, model sensor ialah cara mengira fungsi kualiti keadaan yang sepadan dengan metrik. Dalam aplikasi kami, sensor yang akan digunakan ialah LIDAR berbilang gema 3D (lihat Bahagian VI). Data input akan merangkumi julat ri berdasarkan titik pi dan sudut θi. Daripada set data ini, grid pengimbasan (SG) dalam koordinat kutub dibina. Setiap baris SG sepadan dengan sektor sudut Θ=[θ-, θ+] yang ditakrifkan dalam RxΘ. Julat sel ialah R=[r-,r+] yang bermaksud setiap sel ditakrifkan oleh sepasang jisim m{Θ,R}. Jisim A∈Ω sepadan dengan setiap proposisi ditemui di sini [13]: di mana μF dan μO masing-masing sepadan dengan kebarangkalian penggera palsu dan pengesanan terlepas penderia. Untuk kesederhanaan, fungsi jisim ini, m(O), m(F) dan m(Θ), akan digambarkan. Rajah 2 Pembinaan Grid Peta (MG) Rajah 2 menunjukkan proses membina dan mengemas kini MG menggunakan awan titik sensor yang disediakan pada masa t. Kemas kini ini dilakukan berdasarkan gabungan bukti berbilang grid. Ini adalah bahagian proses yang paling menarik, kerana ia membenarkan masa untuk mengemas kini grid peta dan menilai status unit. Di antara pelbagai pengendali teori kepercayaan, peraturan gabungan Dempster-Shafer digunakan: di mana mmG,t dan mmG,t-1 mewakili kualiti grid peta dan grid imbasan pada masa t, masing-masing berfungsi . Operator ditakrifkan sebagai: di mana menghasilkan hasil mMG,t(A) yang mentakrifkan keadaan setiap sel, yang bergantung pada keadaan sebelumnya dan metrik baharu. Jisim yang dihasilkan mengikut setiap negeri didapati seperti berikut [13]: Pada asasnya, sifat ini menunjukkan percanggahan antara t-1 dan t. Ketidakkonsistenan berlaku apabila unit bertukar daripada Bebas kepada Diduduki atau sebaliknya. Oleh itu, pengesanan konflik boleh membawa kepada penilaian sel dinamik. Konflik membenarkan penandaan sel yang diduduki yang mengubah keadaannya berdasarkan dua jenis konflik: di mana Proses gabungan menormalkan kualiti keadaan dengan jumlah konflik ini, tetapi mempertimbangkan untuk menggunakan jumlah konflik ini. unit mudah alih yang mentakrifkan objek dinamik. Setiap pose yang dikesan kemudiannya digunakan sebagai input untuk penjanaan trajektori dalam bahagian seterusnya. Bahagian ini dikhususkan untuk perancangan laluan, iaitu mencipta trajektori geometri (mengikut titik koordinat) Ai(xi,yi). Oleh kerana kertas kerja ini bertujuan untuk mengesahkan kebolehlaksanaan seni bina pengelakan yang dicadangkan, lengkung kelajuan dan kawalan membujur yang berkaitan tidak dipertimbangkan. Seperti yang dinyatakan dalam Bahagian 2, modul perancangan laluan mempunyai dua matlamat: untuk menjana trajektori nominal global berdasarkan titik asal dan ketibaan, dan untuk menjana trajektori tempatan untuk mengelak daripada mengesan halangan. Di sini, tumpuan adalah pada penjanaan trajektori pengelakan. Trajektori pengelakan ini mesti mematuhi piawaian keselamatan, khususnya jarak membujur dan sisi ke halangan. Jarak ini boleh sama, mewujudkan zon keselamatan bulat di sekeliling halangan, seperti yang dicadangkan baru-baru ini dalam [1]. Kertas kerja ini mencadangkan generalisasi kaedah dengan mempertimbangkan keadaan keseluruhan di mana piawaian keselamatan mendatar dan menegak adalah berbeza. Untuk mendapatkan bentuk geometri trajektori, terdapat beberapa kaedah matematik berdasarkan fungsi seperti lengkung clothoid, lengkung Bezier atau splines [14], [15]. Kajian menyeluruh semua kaedah geometri ini diberikan dalam [16]. Kaedah ini mempunyai ciri-ciri yang menarik (kelicinan, pemilihan trajektori terbaik antara satu set calon, dsb.), tetapi ia boleh mahal dari segi pengiraan. Antaranya, fungsi sigmoid mewakili pertukaran yang adil antara kelancaran dan kos pengiraan. Pendekatan yang dipertimbangkan mengesyorkan menggunakan kaedah matematik ini bersama-sama dengan penjadual Horizon asli untuk mengurangkan kos pengiraan. Kelebihan pendekatan perancangan ini dibincangkan secara meluas dalam [1]. Perancang tempatan ini mempertimbangkan maklumat tentang halangan yang dikesan daripada grid penghunian untuk menentukan gerakan pengelakan lancar yang sesuai dan kembali ke trajektori nominal. A. Pengelakan Geometrik Rajah 3 menunjukkan trajektori yang berbeza: trajektori nominal, zon selamat dan trajektori pengelakan lancar akhir. Definisi zon keselamatan R ialah langkah pertama selepas mengesan halangan. Kawasan ini tidak boleh dilayari untuk mengelakkan perlanggaran kerana berdekatan dengan halangan. Paksi separa utama dan separa kecil bagi elips Lx dan Ly, masing-masing, ialah kriteria keselamatan yang menentukan kawasan tersebut. Setelah ditakrifkan, trajektori pengelakan boleh direka bentuk. Untuk memastikan keselesaan penumpang, ciri berdasarkan bentuk S telah dipilih. Dalam Rajah 3, A merujuk kepada titik permulaan (iaitu pusat graviti kenderaan ego), B ialah titik lekuk sigmoid, dan WP ialah titik permulaan yang perlu dicapai. Kelancaran C() boleh dilaraskan supaya trajektori yang dielakkan boleh ditakrifkan sebagai Untuk mendapatkan algoritma yang teguh apabila halangan bergerak, keseluruhan proses diulang untuk setiap sampel vektor mendatar (mengenal pasti kawasan selamat dan Kira titik jalan berdasarkan fungsi sigmoid). Rajah 3 Perancangan trajektori B. Perancangan mendatar yang digunakan untuk mengurangkan kos kos yang digunakan untuk mengurangkan kos setempat. Ia tidak mengikut keseluruhan trajektori mengelakkan halangan, tetapi dibahagikan kepada beberapa bahagian. Trajektori tempatan dikira pada setiap sampel pada tahap diskret ini, mengurangkan kos pengiraan dan menjadikan algoritma teguh kepada halangan dinamik. Dua parameter boleh diparameterkan: saiz sampel dan panjang mendatar. Yang terakhir bergantung pada penderia persepsi yang dilengkapi (kekangan perkakasan) dan kelajuan kenderaan (horizon bergolek). Langkah-langkah sampel mewakili pembahagian trajektori kepada segmen tempatan. Keseluruhan prinsip diringkaskan dalam Rajah 4. Gambar 4 Perancangan Horizon Apabila kenderaan mencapai langkah persampelan seterusnya, ufuk tempatan akan dikira semula. Seperti yang dapat dilihat, terdapat bahagian yang sama antara kedua-dua lelaran yang membolehkan algoritma mengendalikan halangan dinamik. Seperti domain masa diskret, pilihan saiz sampel memerlukan pertukaran antara ketepatan dan kos pengiraan. Algoritma berulang sehingga vektor ufuk mencapai penghujung trajektori lengkap, iaitu apabila penderia persepsi meliputi semua subbahagian trajektori. Trajektori geometri ini adalah input kepada peringkat kawalan bimbingan. Bahagian ini memperkenalkan reka bentuk pengawal sisi yang digunakan dalam modul kawalan yang ditunjukkan dalam Rajah 1. Bimbingan sisi bertujuan untuk mengurangkan dua jenis ralat, iaitu ralat sisi, jarak antara CoG kenderaan dengan trajektori rujukan, dan ralat arah, jarak antara paksi membujur kenderaan dan trajektori rujukan, seperti yang ditunjukkan dalam Rajah 5: Rajah 5 Ralat sisi dan tajuk Di sini, bukannya ralat sisi CoG klasik ey, adalah disyorkan untuk menggunakan ralat sisi apabila CoP ditakrifkan sebagai [9]:
Berdasarkan model basikal planar [17] dan menggunakan ralat pengesanan (11) dan (12), model ralat penjejakan yang digunakan untuk mereka bentuk pengawal navigasi sisi CoP ialah:
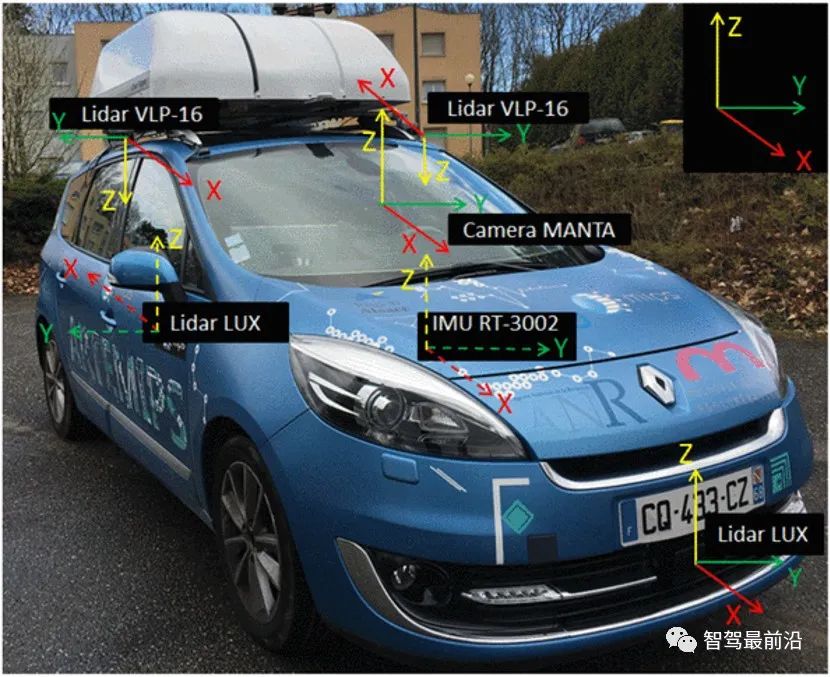
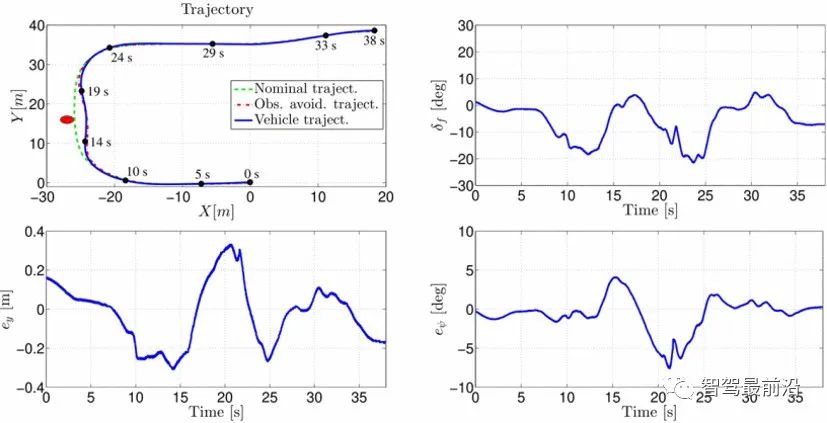
, δf ialah sudut putaran roda hadapan, Pengawal sisi mengira δf yang sesuai untuk memastikan ralat vektor keadaan menumpu hampir kepada sifar. Tambahan pula, memandangkan dinamik model ralat penjejakan dipengaruhi oleh wref, pengawal juga mesti memastikan tahap pengecilan pengaruhnya. Untuk mencapai matlamat ini, pengawal sisi yang digabungkan dengan maklum balas ke hadapan kepada maklum balas keadaan teguh dicadangkan [2]: gambar 6 Keputusan percubaan Platform percubaan ARTEMIPS ialah kenderaan ujian automatik yang dilengkapi dengan pelbagai penderia: IMU (Unit Pengukuran Inersia) berketepatan tinggi RT-3002 menggunakan teknologi DGPS, 2 pengimbas laser 2D 4 lapisan IBEO LUX, 2 Pengimbas laser VLP-16 Velodyne3D dan kamera jarak tinggi MANTA-G125 (lihat Rajah 6)). RT-3002 digunakan sebagai penderia rujukan untuk pengukuran kedudukan, halaju, pecutan dan arah. Pengimbas LUX digunakan untuk menyediakan pengesanan jauh (dalam bentuk awan titik 4 lapisan) di hadapan dan belakang kereta. VLP-16 digunakan untuk melengkapkan pengesanan persekitaran pada kedua-dua belah kereta (ia menyediakan awan titik 16 lapisan dan mempunyai pandangan sekeliling 360°). ARTEMIPS juga dilengkapi dengan 3 penggerak dan 2 motor servo bersepadu MAC-141 untuk mengawal stereng dan pedal brek, serta sistem NI-daq pelbagai fungsi untuk mengemudi enjin kereta. Semua penderia dan penggerak dipautkan kepada komputer terbenam yang menjalankan penyelesaian perisian RTMaps Intempora. Ia adalah platform khusus untuk sistem multi-sensor dan multi-actuator. . situasi mengelak stacle An protokol eksperimen digunakan untuk menilai prestasi seni bina yang dicadangkan. Ujian ini dilakukan pada kelajuan malar vx=10km/j. Pictures figure 7 urutan untuk ujian penghindaran uji Pictures figure 8 titik awan, koordinat asal dan pengesanan halangan Hasil eksperimen ditunjukkan dalam Rajah 9 Tunjukkan . Seperti yang anda boleh lihat dari imej kiri atas, garisan trajektori nominal bersilang dengan kedudukan objek, manakala laluan merah yang terhasil mengelakkan halangan. Ia juga boleh diperhatikan bahawa pengawal sisi memastikan pengesanan trajektori yang baik dan mengelakkan pengesanan halangan antara 13 s dan 20 s. Dalam selang masa ini, pengawal menjana sudut stereng yang berubah daripada nilai positif kepada negatif untuk mengelakkan halangan dan memastikan jumlah ralat penjejakan yang kecil. Pictures figure 9 Hasil Pengawal Pemandu Conclusion ini mencadangkan skim penghindaran halangan dinamik berdasarkan tiga tahap persepsi, perancangan jalan dan panduan kawalan. Pengesanan halangan dinamik dilakukan berdasarkan grid penghunian bukti. Perancangan laluan adalah berdasarkan fungsi sigmoïd untuk menjana trajektori yang lancar bagi mengelak daripada mengesan halangan. Akhirnya, kenderaan itu mengikut trajektori rujukan yang dijana kenderaan melalui strategi berasaskan kawalan sisi di pusat perlanggaran. Keputusan eksperimen pada kenderaan ujian kami menunjukkan bahawa kaedah ini berkesan untuk mengelakkan halangan. Kerja masa depan akan merangkumi pertimbangan strategi kedudukan dan penilaian pendekatan ini dalam situasi yang lebih kompleks. Gambar
2 Pengesanan halangan dinamik berdasarkan grid dinamik
 gambar
gambar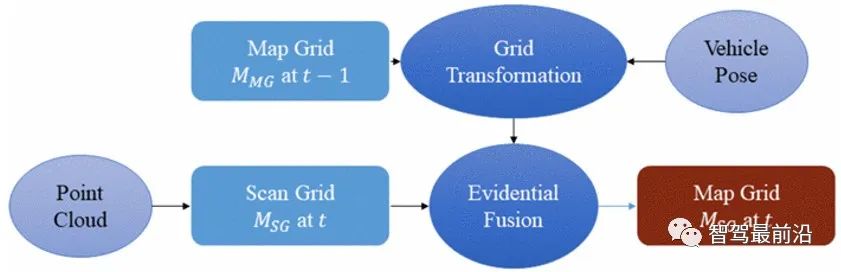 Gambar
Gambar



4 Penjanaan trajektori

 Gambar
Gambar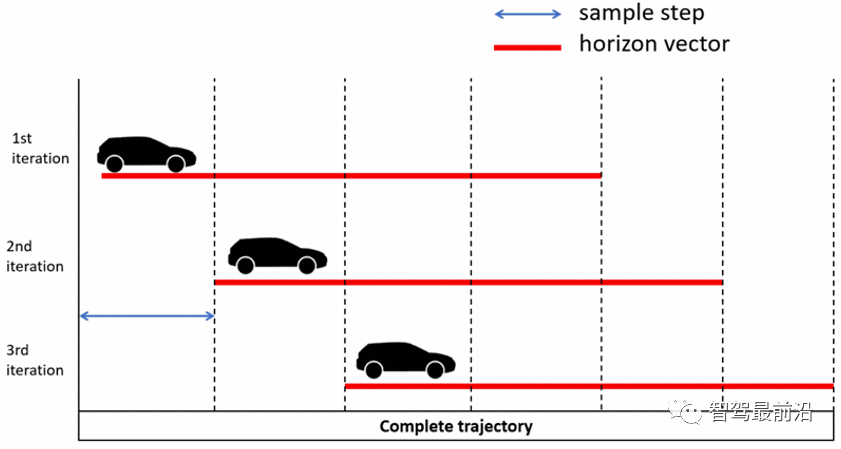 Gambar
Gambar5 Reka Bentuk Pengawal
 Gambar
Gambar  antara CoP dan CoG Jarak xcop hanya bergantung pada konfigurasi kenderaan:
antara CoP dan CoG Jarak xcop hanya bergantung pada konfigurasi kenderaan:  di mana m dan Iz ialah jisim kenderaan dan inersia yaw, dan lf ialah jarak antara CoG dan gandar hadapan. Dapat dilihat daripada (12) bahawa ecop ralat sisi CoP adalah lebih tinggi daripada ralat sisi dalam Rajah 5. Dengan cara ini, ralat kedudukan sisi boleh dijangka dan penjejakan trajektori yang lebih baik boleh dijangkakan. Berbeza dengan pengawal klasik berdasarkan CoG (Center of Gravity), di sini Pusat Kesan (CoP) digunakan sebagai titik geometri pada kenderaan. Kelebihan utama CoP adalah pengurangan kerumitan persamaan dinamik sisi, kerana daya sisi tayar belakang tidak menjejaskan gerakan CoP [9].
di mana m dan Iz ialah jisim kenderaan dan inersia yaw, dan lf ialah jarak antara CoG dan gandar hadapan. Dapat dilihat daripada (12) bahawa ecop ralat sisi CoP adalah lebih tinggi daripada ralat sisi dalam Rajah 5. Dengan cara ini, ralat kedudukan sisi boleh dijangka dan penjejakan trajektori yang lebih baik boleh dijangkakan. Berbeza dengan pengawal klasik berdasarkan CoG (Center of Gravity), di sini Pusat Kesan (CoP) digunakan sebagai titik geometri pada kenderaan. Kelebihan utama CoP adalah pengurangan kerumitan persamaan dinamik sisi, kerana daya sisi tayar belakang tidak menjejaskan gerakan CoP [9].  di mana vektor negeri
di mana vektor negeri  kerana istilah gangguan termasuk halaju sudut yaw yang dijangkakan dan pecutan sudut yaw.
kerana istilah gangguan termasuk halaju sudut yaw yang dijangkakan dan pecutan sudut yaw. 
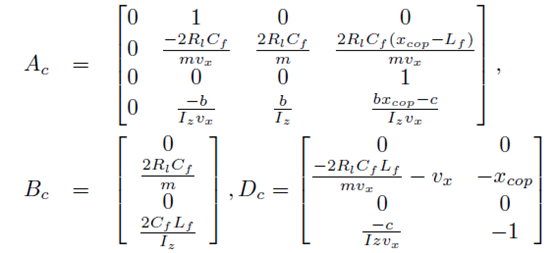


 Lr ialah jarak antara CoG dan gandar belakang, Cf dan Cr adalah kekakuan hadapan dan belakang. Ambil perhatian bahawa Cr tidak berada dalam baris kedua Ac Oleh itu, menggunakan CoP boleh mengurangkan bilangan parameter yang tidak pasti.
Lr ialah jarak antara CoG dan gandar belakang, Cf dan Cr adalah kekakuan hadapan dan belakang. Ambil perhatian bahawa Cr tidak berada dalam baris kedua Ac Oleh itu, menggunakan CoP boleh mengurangkan bilangan parameter yang tidak pasti.  LFF dan KFB masing-masing adalah keuntungan maklum balas ke hadapan dan teguh. Tindakan maklum balas bertujuan untuk menghapuskan sebahagian kesan vektor wref. Faedah CoP ialah maklum balas yang diperolehi tidak memerlukan pengetahuan tentang Cr. Tindakan maklum balas keadaan memastikan penumpuan eksponen vektor ralat ke arah sifar dan melemahkan pengaruh wref vektor. Masalah kawalan teguh ini boleh dinyatakan menggunakan ketaksamaan matriks linear (LMI) seperti yang ditunjukkan dalam [2].
LFF dan KFB masing-masing adalah keuntungan maklum balas ke hadapan dan teguh. Tindakan maklum balas bertujuan untuk menghapuskan sebahagian kesan vektor wref. Faedah CoP ialah maklum balas yang diperolehi tidak memerlukan pengetahuan tentang Cr. Tindakan maklum balas keadaan memastikan penumpuan eksponen vektor ralat ke arah sifar dan melemahkan pengaruh wref vektor. Masalah kawalan teguh ini boleh dinyatakan menggunakan ketaksamaan matriks linear (LMI) seperti yang ditunjukkan dalam [2]. A
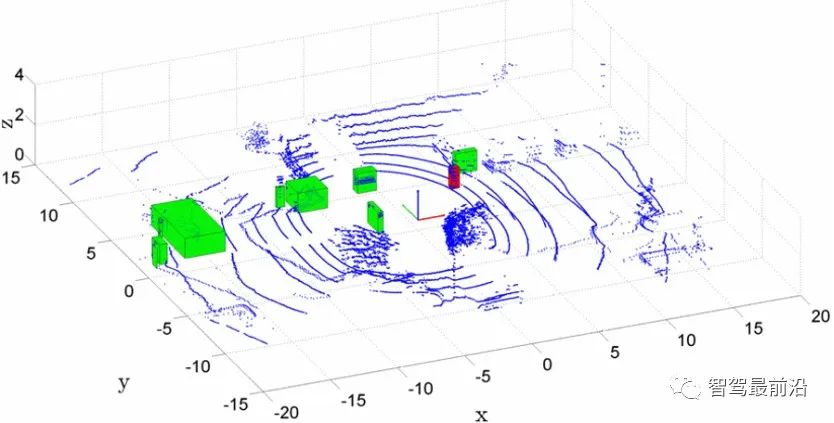
 Awan titik digunakan untuk pembinaan OG mengikut kaedah yang diterangkan dalam Bahagian III berdasarkan set data yang direkodkan daripada empat pengimbas laser. Rajah 7 menunjukkan pemandangan sekeliling dan objek yang perlu dielakkan. Gabungan temporal OG menyerlahkan konflik dalam menggambarkan unit dinamik. Algoritma pengelompokan hierarki (daripada Kotak Alatan Statistik dan Pembelajaran Mesin dalam MATLAB) telah digunakan untuk membina objek dinamik. Ia ditunjukkan dalam Rajah 8. melalui kotak sempadan 3D. Koordinat yang dipaparkan sepadan dengan sikap kenderaan berdasarkan data GPS. Objek yang perlu dielakkan ialah objek merah. Perlu diingatkan bahawa disebabkan oleh sensitiviti kaedah kepada ralat kedudukan, beberapa keputusan pengesanan yang salah boleh didapati.
Awan titik digunakan untuk pembinaan OG mengikut kaedah yang diterangkan dalam Bahagian III berdasarkan set data yang direkodkan daripada empat pengimbas laser. Rajah 7 menunjukkan pemandangan sekeliling dan objek yang perlu dielakkan. Gabungan temporal OG menyerlahkan konflik dalam menggambarkan unit dinamik. Algoritma pengelompokan hierarki (daripada Kotak Alatan Statistik dan Pembelajaran Mesin dalam MATLAB) telah digunakan untuk membina objek dinamik. Ia ditunjukkan dalam Rajah 8. melalui kotak sempadan 3D. Koordinat yang dipaparkan sepadan dengan sikap kenderaan berdasarkan data GPS. Objek yang perlu dielakkan ialah objek merah. Perlu diingatkan bahawa disebabkan oleh sensitiviti kaedah kepada ralat kedudukan, beberapa keputusan pengesanan yang salah boleh didapati. 
 Rujukan
Rujukan
Gambar
Atas ialah kandungan terperinci Penjelasan terperinci tentang pengelakan halangan, perancangan laluan dan teknologi kawalan untuk kenderaan autonomi. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

AI Hentai Generator
Menjana ai hentai secara percuma.

Artikel Panas
Alat panas

Notepad++7.3.1
Editor kod yang mudah digunakan dan percuma

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

Hantar Studio 13.0.1
Persekitaran pembangunan bersepadu PHP yang berkuasa

Dreamweaver CS6
Alat pembangunan web visual

SublimeText3 versi Mac
Perisian penyuntingan kod peringkat Tuhan (SublimeText3)
Topik panas
 1375
1375
 52
52

 Mengapakah Gaussian Splatting begitu popular dalam pemanduan autonomi sehingga NeRF mula ditinggalkan?
Jan 17, 2024 pm 02:57 PM
Mengapakah Gaussian Splatting begitu popular dalam pemanduan autonomi sehingga NeRF mula ditinggalkan?
Jan 17, 2024 pm 02:57 PM
Ditulis di atas & pemahaman peribadi pengarang Gaussiansplatting tiga dimensi (3DGS) ialah teknologi transformatif yang telah muncul dalam bidang medan sinaran eksplisit dan grafik komputer dalam beberapa tahun kebelakangan ini. Kaedah inovatif ini dicirikan oleh penggunaan berjuta-juta Gaussians 3D, yang sangat berbeza daripada kaedah medan sinaran saraf (NeRF), yang terutamanya menggunakan model berasaskan koordinat tersirat untuk memetakan koordinat spatial kepada nilai piksel. Dengan perwakilan adegan yang eksplisit dan algoritma pemaparan yang boleh dibezakan, 3DGS bukan sahaja menjamin keupayaan pemaparan masa nyata, tetapi juga memperkenalkan tahap kawalan dan pengeditan adegan yang tidak pernah berlaku sebelum ini. Ini meletakkan 3DGS sebagai penukar permainan yang berpotensi untuk pembinaan semula dan perwakilan 3D generasi akan datang. Untuk tujuan ini, kami menyediakan gambaran keseluruhan sistematik tentang perkembangan dan kebimbangan terkini dalam bidang 3DGS buat kali pertama.
 Bagaimana untuk menyelesaikan masalah ekor panjang dalam senario pemanduan autonomi?
Jun 02, 2024 pm 02:44 PM
Bagaimana untuk menyelesaikan masalah ekor panjang dalam senario pemanduan autonomi?
Jun 02, 2024 pm 02:44 PM
Semalam semasa temu bual, saya telah ditanya sama ada saya telah membuat sebarang soalan berkaitan ekor panjang, jadi saya fikir saya akan memberikan ringkasan ringkas. Masalah ekor panjang pemanduan autonomi merujuk kepada kes tepi dalam kenderaan autonomi, iaitu, kemungkinan senario dengan kebarangkalian yang rendah untuk berlaku. Masalah ekor panjang yang dirasakan adalah salah satu sebab utama yang kini mengehadkan domain reka bentuk pengendalian kenderaan autonomi pintar satu kenderaan. Seni bina asas dan kebanyakan isu teknikal pemanduan autonomi telah diselesaikan, dan baki 5% masalah ekor panjang secara beransur-ansur menjadi kunci untuk menyekat pembangunan pemanduan autonomi. Masalah ini termasuk pelbagai senario yang berpecah-belah, situasi yang melampau dan tingkah laku manusia yang tidak dapat diramalkan. "Ekor panjang" senario tepi dalam pemanduan autonomi merujuk kepada kes tepi dalam kenderaan autonomi (AVs) kes Edge adalah senario yang mungkin dengan kebarangkalian yang rendah untuk berlaku. kejadian yang jarang berlaku ini
 Pilih kamera atau lidar? Kajian terbaru tentang mencapai pengesanan objek 3D yang mantap
Jan 26, 2024 am 11:18 AM
Pilih kamera atau lidar? Kajian terbaru tentang mencapai pengesanan objek 3D yang mantap
Jan 26, 2024 am 11:18 AM
0. Ditulis di hadapan&& Pemahaman peribadi bahawa sistem pemanduan autonomi bergantung pada persepsi lanjutan, membuat keputusan dan teknologi kawalan, dengan menggunakan pelbagai penderia (seperti kamera, lidar, radar, dll.) untuk melihat persekitaran sekeliling dan menggunakan algoritma dan model untuk analisis masa nyata dan membuat keputusan. Ini membolehkan kenderaan mengenali papan tanda jalan, mengesan dan menjejaki kenderaan lain, meramalkan tingkah laku pejalan kaki, dsb., dengan itu selamat beroperasi dan menyesuaikan diri dengan persekitaran trafik yang kompleks. Teknologi ini kini menarik perhatian meluas dan dianggap sebagai kawasan pembangunan penting dalam pengangkutan masa depan satu. Tetapi apa yang menyukarkan pemanduan autonomi ialah memikirkan cara membuat kereta itu memahami perkara yang berlaku di sekelilingnya. Ini memerlukan algoritma pengesanan objek tiga dimensi dalam sistem pemanduan autonomi boleh melihat dan menerangkan dengan tepat objek dalam persekitaran sekeliling, termasuk lokasinya,
 Kertas Stable Diffusion 3 akhirnya telah dikeluarkan, dan butiran seni bina didedahkan Adakah ia akan membantu untuk menghasilkan semula Sora?
Mar 06, 2024 pm 05:34 PM
Kertas Stable Diffusion 3 akhirnya telah dikeluarkan, dan butiran seni bina didedahkan Adakah ia akan membantu untuk menghasilkan semula Sora?
Mar 06, 2024 pm 05:34 PM
Kertas StableDiffusion3 akhirnya di sini! Model ini dikeluarkan dua minggu lalu dan menggunakan seni bina DiT (DiffusionTransformer) yang sama seperti Sora. Ia menimbulkan kekecohan apabila ia dikeluarkan. Berbanding dengan versi sebelumnya, kualiti imej yang dijana oleh StableDiffusion3 telah dipertingkatkan dengan ketara Ia kini menyokong gesaan berbilang tema, dan kesan penulisan teks juga telah dipertingkatkan, dan aksara bercelaru tidak lagi muncul. StabilityAI menegaskan bahawa StableDiffusion3 ialah satu siri model dengan saiz parameter antara 800M hingga 8B. Julat parameter ini bermakna model boleh dijalankan terus pada banyak peranti mudah alih, dengan ketara mengurangkan penggunaan AI
 Artikel ini sudah cukup untuk anda membaca tentang pemanduan autonomi dan ramalan trajektori!
Feb 28, 2024 pm 07:20 PM
Artikel ini sudah cukup untuk anda membaca tentang pemanduan autonomi dan ramalan trajektori!
Feb 28, 2024 pm 07:20 PM
Ramalan trajektori memainkan peranan penting dalam pemanduan autonomi Ramalan trajektori pemanduan autonomi merujuk kepada meramalkan trajektori pemanduan masa hadapan kenderaan dengan menganalisis pelbagai data semasa proses pemanduan kenderaan. Sebagai modul teras pemanduan autonomi, kualiti ramalan trajektori adalah penting untuk kawalan perancangan hiliran. Tugas ramalan trajektori mempunyai timbunan teknologi yang kaya dan memerlukan kebiasaan dengan persepsi dinamik/statik pemanduan autonomi, peta ketepatan tinggi, garisan lorong, kemahiran seni bina rangkaian saraf (CNN&GNN&Transformer), dll. Sangat sukar untuk bermula! Ramai peminat berharap untuk memulakan ramalan trajektori secepat mungkin dan mengelakkan perangkap Hari ini saya akan mengambil kira beberapa masalah biasa dan kaedah pembelajaran pengenalan untuk ramalan trajektori! Pengetahuan berkaitan pengenalan 1. Adakah kertas pratonton teratur? A: Tengok survey dulu, hlm
 SIMPL: Penanda aras ramalan gerakan berbilang ejen yang mudah dan cekap untuk pemanduan autonomi
Feb 20, 2024 am 11:48 AM
SIMPL: Penanda aras ramalan gerakan berbilang ejen yang mudah dan cekap untuk pemanduan autonomi
Feb 20, 2024 am 11:48 AM
Tajuk asal: SIMPL: ASimpleandEfficientMulti-agentMotionPredictionBaselineforAutonomousDriving Paper pautan: https://arxiv.org/pdf/2402.02519.pdf Pautan kod: https://github.com/HKUST-Aerial-Robotics/SIMPL Unit pengarang: Universiti Sains Hong Kong dan Teknologi Idea Kertas DJI: Kertas kerja ini mencadangkan garis dasar ramalan pergerakan (SIMPL) yang mudah dan cekap untuk kenderaan autonomi. Berbanding dengan agen-sen tradisional
 SOTA terbaharu nuScenes |. SparseAD: Pertanyaan jarang membantu pemanduan autonomi hujung ke hujung yang cekap!
Apr 17, 2024 pm 06:22 PM
SOTA terbaharu nuScenes |. SparseAD: Pertanyaan jarang membantu pemanduan autonomi hujung ke hujung yang cekap!
Apr 17, 2024 pm 06:22 PM
Ditulis di hadapan & titik permulaan Paradigma hujung ke hujung menggunakan rangka kerja bersatu untuk mencapai pelbagai tugas dalam sistem pemanduan autonomi. Walaupun kesederhanaan dan kejelasan paradigma ini, prestasi kaedah pemanduan autonomi hujung ke hujung pada subtugas masih jauh ketinggalan berbanding kaedah tugasan tunggal. Pada masa yang sama, ciri pandangan mata burung (BEV) padat yang digunakan secara meluas dalam kaedah hujung ke hujung sebelum ini menyukarkan untuk membuat skala kepada lebih banyak modaliti atau tugasan. Paradigma pemanduan autonomi hujung ke hujung (SparseAD) tertumpu carian jarang dicadangkan di sini, di mana carian jarang mewakili sepenuhnya keseluruhan senario pemanduan, termasuk ruang, masa dan tugas, tanpa sebarang perwakilan BEV yang padat. Khususnya, seni bina jarang bersatu direka bentuk untuk kesedaran tugas termasuk pengesanan, penjejakan dan pemetaan dalam talian. Di samping itu, berat
 Mari kita bincangkan tentang sistem pemanduan autonomi hujung ke hujung dan generasi seterusnya, serta beberapa salah faham tentang pemanduan autonomi hujung ke hujung?
Apr 15, 2024 pm 04:13 PM
Mari kita bincangkan tentang sistem pemanduan autonomi hujung ke hujung dan generasi seterusnya, serta beberapa salah faham tentang pemanduan autonomi hujung ke hujung?
Apr 15, 2024 pm 04:13 PM
Pada bulan lalu, atas sebab-sebab yang diketahui umum, saya telah mengadakan pertukaran yang sangat intensif dengan pelbagai guru dan rakan sekelas dalam industri. Topik yang tidak dapat dielakkan dalam pertukaran secara semula jadi adalah hujung ke hujung dan Tesla FSDV12 yang popular. Saya ingin mengambil kesempatan ini untuk menyelesaikan beberapa buah fikiran dan pendapat saya pada masa ini untuk rujukan dan perbincangan anda. Bagaimana untuk mentakrifkan sistem pemanduan autonomi hujung ke hujung, dan apakah masalah yang sepatutnya dijangka diselesaikan hujung ke hujung? Menurut definisi yang paling tradisional, sistem hujung ke hujung merujuk kepada sistem yang memasukkan maklumat mentah daripada penderia dan secara langsung mengeluarkan pembolehubah yang membimbangkan tugas. Sebagai contoh, dalam pengecaman imej, CNN boleh dipanggil hujung-ke-hujung berbanding kaedah pengekstrak ciri + pengelas tradisional. Dalam tugas pemanduan autonomi, masukkan data daripada pelbagai penderia (kamera/LiDAR
