
 Peranti teknologi
AI
Dilatih dengan 7,500 data trajektori, CMU dan Meta membolehkan robot mencapai tahap serba boleh di dalam dewan dan dapur
Peranti teknologi
AI
Dilatih dengan 7,500 data trajektori, CMU dan Meta membolehkan robot mencapai tahap serba boleh di dalam dewan dan dapur
Dilatih dengan 7,500 data trajektori, CMU dan Meta membolehkan robot mencapai tahap serba boleh di dalam dewan dan dapur

Hanya dengan latihan menggunakan 7500 data trajektori, robot ini boleh menunjukkan 12 kemahiran operasi yang berbeza dalam 38 tugasan, bukan sahaja terhad kepada memilih dan menolak, tetapi juga termasuk manipulasi objek bersama dan kedudukan semula objek. Tambahan pula, kemahiran ini boleh digunakan pada beratus-ratus situasi yang tidak diketahui yang berbeza, termasuk objek yang tidak diketahui, tugas yang tidak diketahui, dan juga persekitaran dapur yang tidak diketahui sepenuhnya. Robot jenis ini sangat keren!

Mencipta robot yang mampu memanipulasi objek sewenang-wenang dalam persekitaran yang pelbagai telah menjadi matlamat yang sukar difahami selama beberapa dekad. Salah satu sebabnya ialah kekurangan set data robotik yang pelbagai untuk melatih ejen tersebut, serta kekurangan ejen tujuan am yang mampu menghasilkan set data sedemikian
Untuk mengatasi masalah ini, penyelidik dari Carnegie Mellon University dan Meta The author of AI menghabiskan dua tahun membangunkan RoboAgent universal. Matlamat utama mereka adalah untuk membangunkan paradigma yang cekap yang boleh melatih ejen am yang berkeupayaan berbilang kemahiran dengan data terhad, dan menyamaratakan kemahiran ini kepada pelbagai situasi yang tidak diketahui

RoboAgent Terdiri secara modular daripada:
- infrastruktur robotik teragih yang dibina dengan perkakasan tujuan umum yang mampu beroperasi tanpa henti jangka panjang
- RoboHive - rangka kerja bersatu untuk beroperasi dalam simulasi dan pembelajaran Robot dunia sebenar dalam
- RoboSet - tinggi- set data berkualiti yang mewakili pelbagai kemahiran menggunakan objek harian dalam pelbagai senario; dan mengamalkan seni bina dasar baru dan kaedah perwakilan tindakan yang cekap untuk memulihkan di bawah belanjawan data terhad Strategi yang berprestasi baik. . Memandangkan usaha meningkatkan skala sering membantu (cth., RT-1 menunjukkan hasil pada ~130,000 trajektori robot), terdapat keperluan untuk memahami kecekapan dan prinsip generalisasi sistem pembelajaran dalam konteks set data terhad, selalunya data rendah situasi. Oleh itu, matlamat utama pengarang adalah untuk membangunkan paradigma yang berkuasa yang boleh mempelajari strategi umum yang boleh digeneralisasikan dalam situasi data rendah sambil mengelakkan masalah overfitting.
Dataset yang digunakan untuk melatih RoboAgent, RoboSet (MT-ACT), hanya merangkumi 7,500 trajektori (18 kali kurang daripada data RT-1). Set data ini dikumpul terlebih dahulu dan kekal beku. Set data terdiri daripada trajektori berkualiti tinggi yang dikumpul semasa teleoperasi manusia menggunakan perkakasan robotik komoditi (robot Franka-Emika dilengkapi dengan penggenggam Robotiq) merentasi pelbagai tugas dan senario. RoboSet (MT-ACT) jarang merangkumi 12 kemahiran unik dalam beberapa konteks yang berbeza. Data dikumpul dengan membahagikan aktiviti dapur harian (cth. membuat teh, membakar) kepada subtugas yang berbeza, setiap satu mewakili kemahiran yang unik. Set data termasuk kemahiran memilih-dan-tempat biasa, tetapi juga kemahiran yang kaya dengan kenalan seperti mengelap, penutup dan kemahiran yang melibatkan objek yang diartikulasikan.
Kandungan yang ditulis semula:
Set data yang digunakan untuk melatih RoboAgent, RoboSet (MT-ACT), termasuk hanya 7,500 trajektori (18 kali kurang daripada data untuk RT-1). Set data ini dikumpul terlebih dahulu dan kekal beku. Set data terdiri daripada trajektori berkualiti tinggi yang dikumpul semasa teleoperasi manusia menggunakan perkakasan robotik komoditi (robot Franka-Emika dilengkapi dengan penggenggam Robotiq) merentasi pelbagai tugas dan senario. RoboSet (MT-ACT) jarang merangkumi 12 kemahiran unik dalam beberapa konteks yang berbeza. Data dikumpul dengan membahagikan aktiviti dapur harian (cth. membuat teh, membakar) kepada subtugas yang berbeza, setiap satu mewakili kemahiran yang unik. Set data termasuk kemahiran memilih-dan-tempat yang biasa, tetapi juga kemahiran yang kaya dengan kenalan seperti mengelap, mengehadkan dan kemahiran yang melibatkan objek yang diartikulasikan

MT-ACT: Transformer chunking tindakan berbilang tugas
RoboAgent mempelajari strategi umum dalam situasi data rendah berdasarkan dua pandangan utama. Ia menggunakan pengetahuan sedia ada dunia tentang model asas untuk mengelakkan keruntuhan mod, dan menggunakan perwakilan strategi yang baru dan cekap untuk dapat menyerap data berbilang modal yang tinggi
Kandungan yang perlu ditulis semula ialah: 1. Peningkatan semantik : RoboAgent Dengan mempertingkatkan RoboSet (MT-ACT) secara semantik, pengetahuan terdahulu tentang dunia daripada model asas sedia ada disuntik ke dalamnya. Dataset yang terhasil menggabungkan pengalaman robot dengan pengetahuan terdahulu tentang dunia tanpa kos manusia/robot tambahan. Gunakan SAM untuk membahagikan objek sasaran dan mempertingkatkannya secara semantik dari segi bentuk, warna dan perubahan tekstur.
Kandungan yang ditulis semula: 1. Peningkatan semantik: RoboAgent menyuntik pengetahuan sedia ada dunia daripada model asas sedia ada ke dalam RoboSet (MT-ACT) dengan meningkatkannya secara semantik. Dengan cara ini, pengalaman robot dan pengetahuan terdahulu tentang dunia boleh digabungkan tanpa kos manusia/robot tambahan. Gunakan SAM untuk membahagikan objek sasaran dan melakukan peningkatan semantik dari segi bentuk, warna dan perubahan tekstur
2. Perwakilan dasar yang cekap: Set data yang terhasil adalah pelbagai mod dan mengandungi pelbagai kemahiran dan tugas serta senario . Kami menggunakan kaedah pemecahan tindakan pada tetapan berbilang tugas dan membangunkan perwakilan dasar yang baru dan cekap, MT-ACT, yang mampu memperoleh set data berbilang mod dengan jumlah data yang kecil sambil mengelakkan masalah berlebihan
. Keputusan percubaan
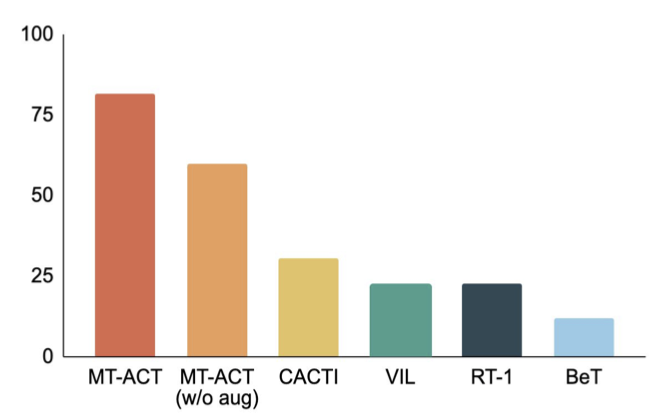
Kecekapan sampel RoboAgent lebih tinggi daripada kaedah sedia ada
Rajah di bawah membandingkan perwakilan dasar MT-ACT yang dicadangkan oleh pengarang dengan beberapa seni bina pembelajaran tiruan. Pengarang hanya menggunakan perubahan persekitaran termasuk perubahan pose objek dan perubahan pencahayaan separa. Sama seperti kajian terdahulu, penulis mengaitkan ini dengan generalisasi L1. Daripada keputusan RoboAgent, dapat dilihat dengan jelas bahawa menggunakan action chunking untuk memodelkan sub-trajektori dengan ketara mengatasi semua kaedah asas, sekali gus membuktikan lagi keberkesanan perwakilan dasar yang dicadangkan oleh pengarang dalam pembelajaran cekap sampel
RoboAgent cemerlang dalam pelbagai peringkat abstraksi
Rajah berikut menunjukkan hasil kaedah ujian pengarang pada tahap generalisasi yang berbeza. Pada masa yang sama, tahap generalisasi juga ditunjukkan melalui visualisasi, di mana L1 mewakili perubahan pose objek, L2 mewakili latar belakang desktop yang pelbagai dan faktor yang mengganggu, dan L3 mewakili kombinasi objek kemahiran baru. Seterusnya, pengarang menunjukkan bagaimana setiap kaedah berprestasi pada tahap generalisasi ini. Dalam kajian penilaian yang teliti, MT-ACT menunjukkan prestasi yang lebih baik daripada kaedah lain, terutamanya pada tahap generalisasi yang lebih sukar (L3)
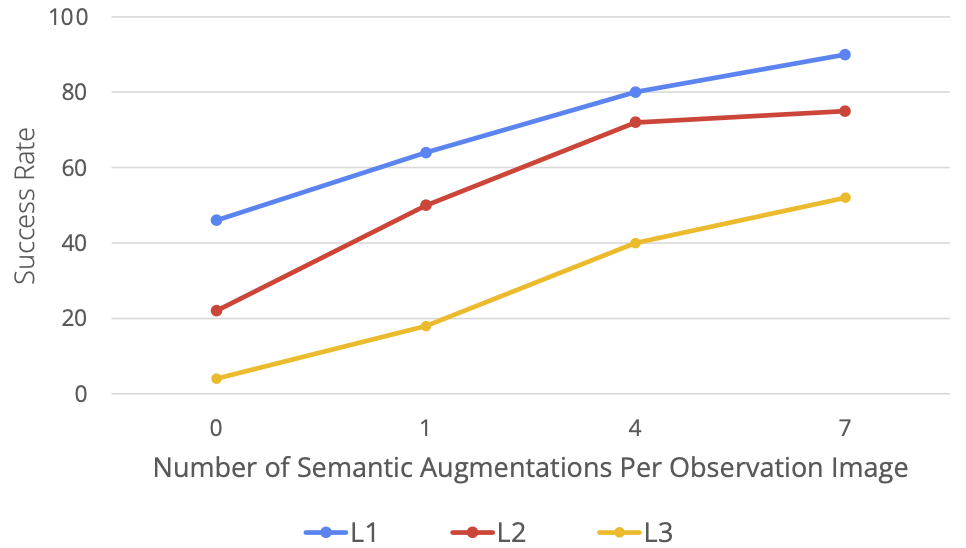
RoboAgent sangat berskala
prestasi RoboAgent yang semakin meningkat peningkatan semantik dalam aktiviti 5 kemahiran. Seperti yang dapat dilihat daripada rajah di bawah, apabila data meningkat (iaitu bilangan peningkatan setiap bingkai meningkat), prestasi meningkat dengan ketara pada semua peringkat generalisasi. Perlu diingat terutamanya bahawa dalam tugas yang lebih sukar (pengertian L3), peningkatan prestasi adalah lebih jelas
RoboAgent dapat menunjukkan kemahirannya dalam pelbagai aktiviti yang berbeza
🎜🎜







Atas ialah kandungan terperinci Dilatih dengan 7,500 data trajektori, CMU dan Meta membolehkan robot mencapai tahap serba boleh di dalam dewan dan dapur. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

AI Hentai Generator
Menjana ai hentai secara percuma.

Artikel Panas
Alat panas

Notepad++7.3.1
Editor kod yang mudah digunakan dan percuma

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

Hantar Studio 13.0.1
Persekitaran pembangunan bersepadu PHP yang berkuasa

Dreamweaver CS6
Alat pembangunan web visual

SublimeText3 versi Mac
Perisian penyuntingan kod peringkat Tuhan (SublimeText3)
Topik panas
 1378
1378
 52
52

 Sumber terbuka! Di luar ZoeDepth! DepthFM: Anggaran kedalaman monokular yang cepat dan tepat!
Apr 03, 2024 pm 12:04 PM
Sumber terbuka! Di luar ZoeDepth! DepthFM: Anggaran kedalaman monokular yang cepat dan tepat!
Apr 03, 2024 pm 12:04 PM
0. Apakah fungsi artikel ini? Kami mencadangkan DepthFM: model anggaran kedalaman monokular generatif yang serba boleh dan pantas. Sebagai tambahan kepada tugas anggaran kedalaman tradisional, DepthFM juga menunjukkan keupayaan terkini dalam tugas hiliran seperti mengecat kedalaman. DepthFM cekap dan boleh mensintesis peta kedalaman dalam beberapa langkah inferens. Mari kita baca karya ini bersama-sama ~ 1. Tajuk maklumat kertas: DepthFM: FastMonocularDepthEstimationwithFlowMatching Pengarang: MingGui, JohannesS.Fischer, UlrichPrestel, PingchuanMa, Dmytr
 Hello, Atlas elektrik! Robot Boston Dynamics hidup semula, gerakan pelik 180 darjah menakutkan Musk
Apr 18, 2024 pm 07:58 PM
Hello, Atlas elektrik! Robot Boston Dynamics hidup semula, gerakan pelik 180 darjah menakutkan Musk
Apr 18, 2024 pm 07:58 PM
Boston Dynamics Atlas secara rasmi memasuki era robot elektrik! Semalam, Atlas hidraulik hanya "menangis" menarik diri daripada peringkat sejarah Hari ini, Boston Dynamics mengumumkan bahawa Atlas elektrik sedang berfungsi. Nampaknya dalam bidang robot humanoid komersial, Boston Dynamics berazam untuk bersaing dengan Tesla. Selepas video baharu itu dikeluarkan, ia telah pun ditonton oleh lebih sejuta orang dalam masa sepuluh jam sahaja. Orang lama pergi dan peranan baru muncul. Ini adalah keperluan sejarah. Tidak dinafikan bahawa tahun ini adalah tahun letupan robot humanoid. Netizen mengulas: Kemajuan robot telah menjadikan majlis pembukaan tahun ini kelihatan seperti manusia, dan tahap kebebasan adalah jauh lebih besar daripada manusia Tetapi adakah ini benar-benar bukan filem seram? Pada permulaan video, Atlas berbaring dengan tenang di atas tanah, seolah-olah terlentang. Apa yang berikut adalah rahang-jatuh
 Versi Kuaishou Sora 'Ke Ling' dibuka untuk ujian: menghasilkan video lebih 120-an, memahami fizik dengan lebih baik dan boleh memodelkan pergerakan kompleks dengan tepat
Jun 11, 2024 am 09:51 AM
Versi Kuaishou Sora 'Ke Ling' dibuka untuk ujian: menghasilkan video lebih 120-an, memahami fizik dengan lebih baik dan boleh memodelkan pergerakan kompleks dengan tepat
Jun 11, 2024 am 09:51 AM
Apa? Adakah Zootopia dibawa menjadi realiti oleh AI domestik? Didedahkan bersama-sama dengan video itu ialah model penjanaan video domestik berskala besar baharu yang dipanggil "Keling". Sora menggunakan laluan teknikal yang serupa dan menggabungkan beberapa inovasi teknologi yang dibangunkan sendiri untuk menghasilkan video yang bukan sahaja mempunyai pergerakan yang besar dan munasabah, tetapi juga mensimulasikan ciri-ciri dunia fizikal dan mempunyai keupayaan gabungan konsep dan imaginasi yang kuat. Mengikut data, Keling menyokong penjanaan video ultra panjang sehingga 2 minit pada 30fps, dengan resolusi sehingga 1080p dan menyokong berbilang nisbah aspek. Satu lagi perkara penting ialah Keling bukanlah demo atau demonstrasi hasil video yang dikeluarkan oleh makmal, tetapi aplikasi peringkat produk yang dilancarkan oleh Kuaishou, pemain terkemuka dalam bidang video pendek. Selain itu, tumpuan utama adalah untuk menjadi pragmatik, bukan untuk menulis cek kosong, dan pergi ke dalam talian sebaik sahaja ia dikeluarkan Model besar Ke Ling telah pun dikeluarkan di Kuaiying.
 Daya hidup kecerdasan super membangkitkan! Tetapi dengan kedatangan AI yang mengemas kini sendiri, ibu tidak perlu lagi bimbang tentang kesesakan data
Apr 29, 2024 pm 06:55 PM
Daya hidup kecerdasan super membangkitkan! Tetapi dengan kedatangan AI yang mengemas kini sendiri, ibu tidak perlu lagi bimbang tentang kesesakan data
Apr 29, 2024 pm 06:55 PM
Saya menangis hingga mati. Dunia sedang membina model besar. Data di Internet tidak mencukupi. Model latihan kelihatan seperti "The Hunger Games", dan penyelidik AI di seluruh dunia bimbang tentang cara memberi makan data ini kepada pemakan yang rakus. Masalah ini amat ketara dalam tugas berbilang modal. Pada masa mereka mengalami kerugian, pasukan pemula dari Jabatan Universiti Renmin China menggunakan model baharu mereka sendiri untuk menjadi yang pertama di China untuk menjadikan "suapan data yang dijana model itu sendiri" menjadi kenyataan. Selain itu, ia merupakan pendekatan serampang dua mata dari segi pemahaman dan sisi penjanaan Kedua-dua pihak boleh menjana data baharu berbilang modal yang berkualiti tinggi dan memberikan maklum balas data kepada model itu sendiri. Apakah model? Awaker 1.0, model berbilang modal besar yang baru sahaja muncul di Forum Zhongguancun. Siapa pasukan itu? Enjin Sophon. Diasaskan oleh Gao Yizhao, pelajar kedoktoran di Sekolah Kecerdasan Buatan Hillhouse Universiti Renmin.
 Bagaimanakah AI boleh menjadikan robot lebih autonomi dan boleh disesuaikan?
Jun 03, 2024 pm 07:18 PM
Bagaimanakah AI boleh menjadikan robot lebih autonomi dan boleh disesuaikan?
Jun 03, 2024 pm 07:18 PM
Dalam bidang teknologi automasi perindustrian, terdapat dua titik panas terkini yang sukar diabaikan: kecerdasan buatan (AI) dan Nvidia. Jangan ubah maksud kandungan asal, perhalusi kandungan, tulis semula kandungan, jangan teruskan: “Bukan itu sahaja, kedua-duanya berkait rapat, kerana Nvidia tidak terhad kepada unit pemprosesan grafik asalnya (GPU ), ia sedang mengembangkan GPUnya Teknologi ini meluas ke bidang kembar digital dan berkait rapat dengan teknologi AI yang baru muncul "Baru-baru ini, NVIDIA telah mencapai kerjasama dengan banyak syarikat industri, termasuk syarikat automasi industri terkemuka seperti Aveva, Rockwell Automation, Siemens. dan Schneider Electric, serta Teradyne Robotics dan syarikat MiR dan Universal Robotsnya. Baru-baru ini, Nvidiahascoll
 2 bulan kemudian, robot humanoid Walker S boleh melipat pakaian
Apr 03, 2024 am 08:01 AM
2 bulan kemudian, robot humanoid Walker S boleh melipat pakaian
Apr 03, 2024 am 08:01 AM
Editor Laporan Kuasa Mesin: Wu Xin Versi domestik robot humanoid + pasukan model besar menyelesaikan tugas operasi bahan fleksibel yang kompleks seperti melipat pakaian buat kali pertama. Dengan pelancaran Figure01, yang mengintegrasikan model besar berbilang modal OpenAI, kemajuan berkaitan rakan domestik telah menarik perhatian. Baru semalam, UBTECH, "stok robot humanoid nombor satu" China, mengeluarkan demo pertama robot humanoid WalkerS yang disepadukan secara mendalam dengan model besar Baidu Wenxin, menunjukkan beberapa ciri baharu yang menarik. Kini, WalkerS, diberkati oleh keupayaan model besar Baidu Wenxin, kelihatan seperti ini. Seperti Rajah01, WalkerS tidak bergerak, tetapi berdiri di belakang meja untuk menyelesaikan satu siri tugasan. Ia boleh mengikut perintah manusia dan melipat pakaian
 Robot pertama yang menyelesaikan tugas manusia secara autonomi muncul, dengan lima jari fleksibel dan kelajuan manusia luar biasa, dan model besar menyokong latihan angkasa maya
Mar 11, 2024 pm 12:10 PM
Robot pertama yang menyelesaikan tugas manusia secara autonomi muncul, dengan lima jari fleksibel dan kelajuan manusia luar biasa, dan model besar menyokong latihan angkasa maya
Mar 11, 2024 pm 12:10 PM
Minggu ini, FigureAI, sebuah syarikat robotik yang dilaburkan oleh OpenAI, Microsoft, Bezos, dan Nvidia, mengumumkan bahawa ia telah menerima hampir $700 juta dalam pembiayaan dan merancang untuk membangunkan robot humanoid yang boleh berjalan secara bebas dalam tahun hadapan. Dan Optimus Prime Tesla telah berulang kali menerima berita baik. Tiada siapa yang meragui bahawa tahun ini akan menjadi tahun apabila robot humanoid meletup. SanctuaryAI, sebuah syarikat robotik yang berpangkalan di Kanada, baru-baru ini mengeluarkan robot humanoid baharu, Phoenix. Pegawai mendakwa bahawa ia boleh menyelesaikan banyak tugas secara autonomi pada kelajuan yang sama seperti manusia. Pheonix, robot pertama di dunia yang boleh menyelesaikan tugas secara autonomi pada kelajuan manusia, boleh mencengkam, menggerakkan dan meletakkan setiap objek secara elegan di sisi kiri dan kanannya dengan perlahan. Ia boleh mengenal pasti objek secara autonomi
 Tentera Udara A.S. mempamerkan jet pejuang AI pertamanya dengan profil tinggi! Menteri secara peribadi menjalankan pandu uji tanpa campur tangan semasa keseluruhan proses, dan 100,000 baris kod telah diuji selama 21 kali.
May 07, 2024 pm 05:00 PM
Tentera Udara A.S. mempamerkan jet pejuang AI pertamanya dengan profil tinggi! Menteri secara peribadi menjalankan pandu uji tanpa campur tangan semasa keseluruhan proses, dan 100,000 baris kod telah diuji selama 21 kali.
May 07, 2024 pm 05:00 PM
Baru-baru ini, bulatan tentera telah terharu dengan berita: jet pejuang tentera AS kini boleh melengkapkan pertempuran udara automatik sepenuhnya menggunakan AI. Ya, baru-baru ini, jet pejuang AI tentera AS telah didedahkan buat pertama kali, mendedahkan misterinya. Nama penuh pesawat pejuang ini ialah Variable Stability Simulator Test Aircraft (VISTA). Ia diterbangkan sendiri oleh Setiausaha Tentera Udara AS untuk mensimulasikan pertempuran udara satu lawan satu. Pada 2 Mei, Setiausaha Tentera Udara A.S. Frank Kendall berlepas menggunakan X-62AVISTA di Pangkalan Tentera Udara Edwards Ambil perhatian bahawa semasa penerbangan selama satu jam, semua tindakan penerbangan telah diselesaikan secara autonomi oleh AI! Kendall berkata - "Sejak beberapa dekad yang lalu, kami telah memikirkan tentang potensi tanpa had pertempuran udara-ke-udara autonomi, tetapi ia sentiasa kelihatan di luar jangkauan." Namun kini,
