

Syarikat tersenarai utama dalam industri robot humanoid: (01810.HK);(002472.SZ);(688160.SH);(603728.SH);(300660.SZ);(300969.SZ);(688017);(688017). .SH );(002896.SZ);(300124.SZ);Qinchuan Machine Tool(000837.SZ);(300718.SZ);(002338.SZ);(002747.SZ) dll
Data teras artikel ini: Rantaian industri humanoid China, pengedaran nilai bahagian teras humanoid China, ruang penyetempatan bahagian teras robot humanoid China
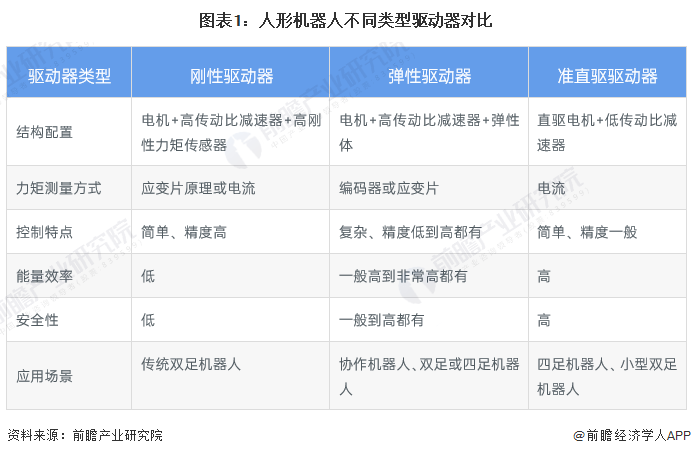
Penyelesaian pemacu separa langsung dijangka menjadi pilihan pertama untuk sesetengah sendi
Penyelesaian semasa menggunakan struktur penggerak tegar tradisional, yang dicirikan oleh ketepatan yang tinggi, tetapi ketumpatan kuasa tidak dapat mencapai tahap otot biologi, rintangan hentaman adalah purata, dan ia tidak sesuai untuk persekitaran geografi yang kompleks. Sebagai tambahan kepada penggerak tegar, terdapat juga penggerak elastik, pemacu separa langsung dan penyelesaian lain Algoritma kawalan akan menjadi kompleks dan ketepatannya adalah purata, tetapi keselamatan dan kecekapannya dipertingkatkan dengan ketara digunakan lebih kerap dalam beberapa anjing berkaki empat dan penyelesaian robot humanoid.
Berbanding dengan penyelesaian pemacu tegar (motor tork tanpa bingkai + penderia daya + pengekod), penyelesaian pemacu separa terus kebanyakannya menggunakan motor pemacu terus dengan pengekod magnet pengurang planet nisbah pengurangan rendah, tanpa memerlukan penderia daya yang mahal secara langsung merealisasikan kawalan daya, jadi ia sesuai untuk keadaan yang memerlukan ketepatan kawalan daya yang tinggi, tindak balas pantas dan rintangan hentaman. Pada masa ini, robot UCLA asing Artemis telah membangunkan empat modul pemacu separa langsung secara bebas untuk sendi pinggul.
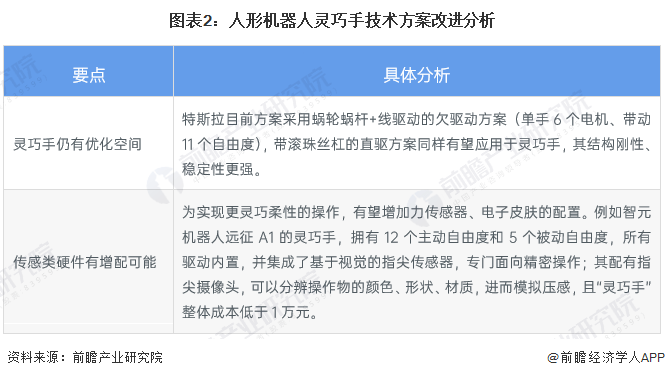
Tangan cerdik diharapkan dapat meningkatkan ketangkasan melalui kaedah transmisi dan pemanduan yang lebih baik
Pada masa ini tangan tangkas Tesla menggunakan penyelesaian pacuan bawah gear cacing, tetapi tangan tangkas mempunyai pelan konfigurasi yang lebih kaya. Mengikut kaedah pemanduan, ia meliputi skim pacuan penuh dan kurang pacuan Skim pacuan bawah biasanya digunakan. Bilangan motor adalah kurang daripada darjah kebebasan bersama , kos rendah, dan mempunyai kelebihan fleksibiliti untuk menahan kesan luaran mengikut penghantaran mekanikal Dari segi mod, ia juga boleh dibahagikan kepada rod penyambung, gear cacing, skru bebola, dan pemacu tali pinggang.
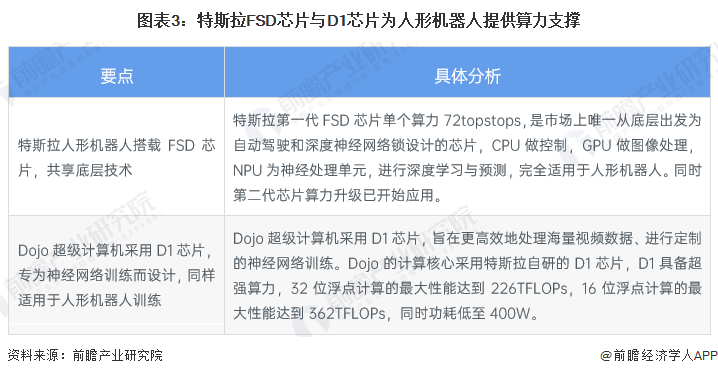
Inovasi dan kemajuan dalam teknologi cip menggalakkan pembangunan robot humanoid
Robot humanoid perlu menyepadukan pelbagai penderia, penggerak, penglihatan komputer, sistem pengecaman dan kawalan pertuturan serta peralatan lain, serta perlu mereka bentuk perancangan gerakan dan algoritma kawalan yang kompleks. Peranti dan algoritma ini memerlukan cip dengan kuasa pengkomputeran yang kuat, penggunaan kuasa yang rendah, saiz yang kecil dan integrasi yang tinggi. Oleh itu, sebagai komponen teras robot humanoid, cip secara langsung menentukan prestasi dan kefungsian robot. Di samping itu, cip juga boleh meningkatkan prestasi dan kecekapan robot melalui pecutan perkakasan, pengiraan rangkaian saraf, dsb., dan mencapai fungsi peringkat lebih tinggi, seperti pengecaman muka, terjemahan suara, analisis emosi, dsb. Oleh itu, inovasi dan kemajuan dalam teknologi cip akan menggalakkan pembangunan industri robot humanoid.
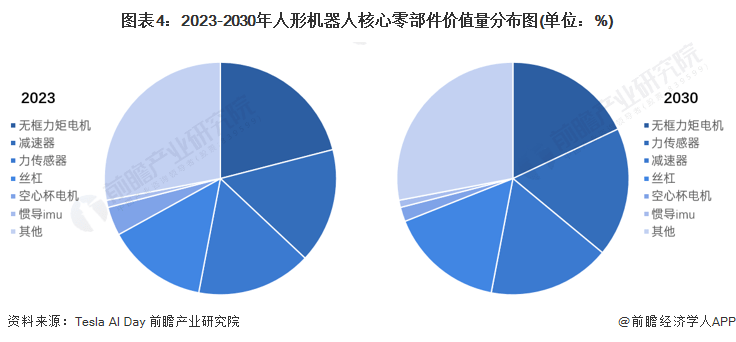
Motor tork tanpa bingkai, pengurang dan penderia daya akan mengekalkan nilai yang tinggi
Menurut data daripada Tesla AI Day, mengambil Tesla Optimus sebagai contoh, tiga komponen teras teratas robot humanoid dalam nilai pada tahun 2023 ialah motor tork tanpa bingkai, pengurang dan penderia daya dan pada tahun 2030, motor tork tanpa bingkai akan mengambil kira nilai tersebut; nisbah penderia daya dan pengurang telah meningkat, dan bahagian nilai penderia daya dan pengurang telah meningkat, dan penderia daya akan mengatasi pengurang dan kedudukan kedua, dengan jumlah bahagian ketiga-tiganya masih melebihi 50%.
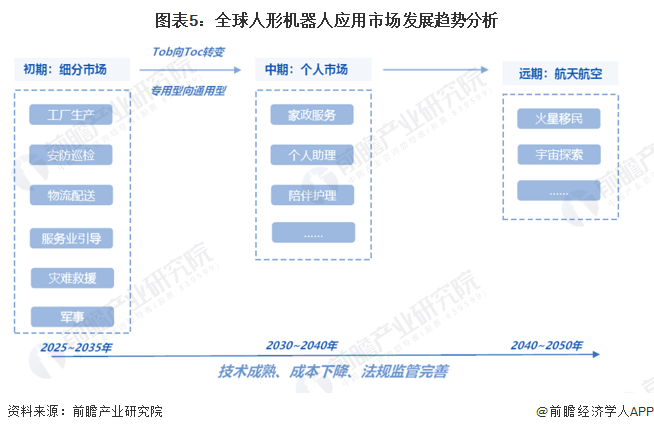
Pasaran aplikasi robot humanoid akan menembusi dari kawasan khusus ke aplikasi umum
Merujuk kepada pemanduan autonomi, ia mengambil masa lebih daripada 5 tahun untuk beralih dari L1 ke L3, dan pemanduan autonomi sepenuhnya L5 masih akan mengambil masa. Kematangan robot humanoid juga secara beransur-ansur Mereka boleh dikomersialkan terlebih dahulu dalam segmen pasaran, seperti pengeluaran kilang, pemeriksaan keselamatan, pengedaran logistik, bimbingan industri perkhidmatan, penyelamatan, ketenteraan, dan lain-lain. Mereka mempunyai fungsi tunggal pada peringkat awal, dan kemudian secara beransur-ansur matang menjadi robot tujuan umum , ditukar daripada Tob kepada Toc, memasuki pasaran seperti pengemasan pada masa hadapan, robot humanoid dijangka digunakan dalam bidang aeroangkasa.
Untuk penyelidikan dan analisis yang lebih terperinci mengenai industri ini, sila lihat Institut Penyelidikan Industri Bakal.
Pada masa yang sama, Institut Penyelidikan Industri Qianzhan juga menyediakan perundingan dan penyelesaian lain. Memetik kandungan artikel ini dalam sebarang pendedahan maklumat awam seperti prospektus dan laporan tahunan syarikat memerlukan kebenaran rasmi daripada Institut Penyelidikan Industri Qianzhan.
Analisis industri yang lebih mendalam tersedia dalam [Foresight Economist APP], dan anda juga boleh berkomunikasi dan berinteraksi dengan 500+ ahli ekonomi/penyelidik industri kanan.
Atas ialah kandungan terperinci Analisis status pasaran dan trend pembangunan industri robot humanoid China pada tahun 2023. Pasaran aplikasi akan menembusi daripada bidang tersegmen kepada tujuan umum. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!
 Langkah membina projek SpringBoot
Langkah membina projek SpringBoot
 Bagaimana untuk mengekalkan bilangan tempat perpuluhan dalam C++
Bagaimana untuk mengekalkan bilangan tempat perpuluhan dalam C++
 Bagaimana untuk menyediakan pelayan ftp
Bagaimana untuk menyediakan pelayan ftp
 Apakah arahan cmd untuk membersihkan sampah pemacu C?
Apakah arahan cmd untuk membersihkan sampah pemacu C?
 Platform jual beli Bitcoin Domestik
Platform jual beli Bitcoin Domestik
 Cara menggunakan fungsi max
Cara menggunakan fungsi max
 Bagaimana untuk mendepositkan wang di Binance
Bagaimana untuk mendepositkan wang di Binance
 Bagaimana untuk membuka fail iso
Bagaimana untuk membuka fail iso








![[Web front-end] Permulaan pantas Node.js](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



