
 Peranti teknologi
AI
Tajuk yang ditulis semula: Byte melancarkan program pra-latihan visual Vi-PRoM untuk meningkatkan kadar dan kesan kejayaan operasi robot
Peranti teknologi
AI
Tajuk yang ditulis semula: Byte melancarkan program pra-latihan visual Vi-PRoM untuk meningkatkan kadar dan kesan kejayaan operasi robot
Tajuk yang ditulis semula: Byte melancarkan program pra-latihan visual Vi-PRoM untuk meningkatkan kadar dan kesan kejayaan operasi robot

Dalam beberapa tahun kebelakangan ini, pra-latihan visual pada data dunia sebenar berskala besar telah mencapai kemajuan yang ketara, menunjukkan potensi besar dalam pembelajaran robot berasaskan pemerhatian piksel. Walau bagaimanapun, kajian ini berbeza dari segi data pra-latihan, kaedah dan model. Oleh itu, jenis data, kaedah dan model pralatihan yang manakah boleh membantu kawalan robot dengan lebih baik masih menjadi persoalan terbuka
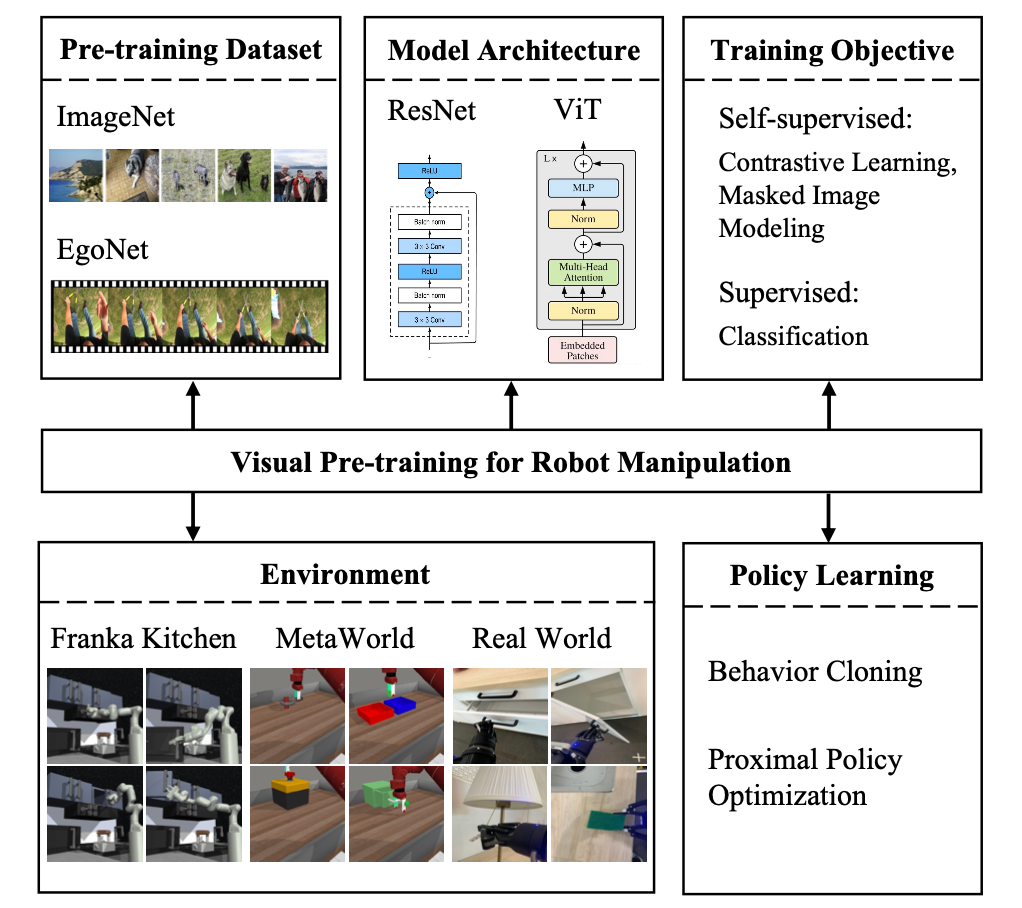
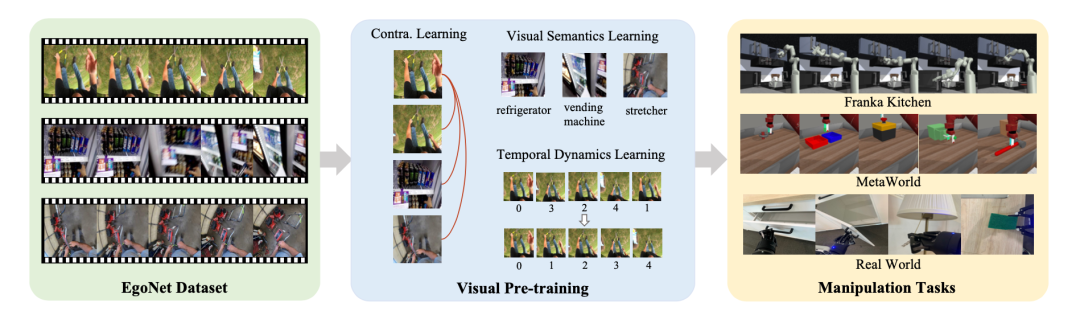
Berdasarkan ini, penyelidik dari pasukan Penyelidikan ByteDance bermula daripada set data pra-latihan, seni bina model dan The tiga perspektif asas kaedah latihan mengkaji secara menyeluruh kesan strategi pra-latihan visual ke atas tugas pengendalian robot, dan menyediakan beberapa keputusan eksperimen penting yang bermanfaat kepada pembelajaran robot. Selain itu, mereka mencadangkan skim pra-latihan visi untuk pengendalian robot yang dipanggil Vi-PRoM, yang menggabungkan pembelajaran penyeliaan kendiri dan pembelajaran diselia. Yang pertama menggunakan pembelajaran kontrastif untuk mendapatkan corak terpendam daripada data tidak berlabel berskala besar, manakala yang kedua bertujuan untuk mempelajari semantik visual dan perubahan dinamik temporal. Sebilangan besar eksperimen operasi robot yang dijalankan dalam pelbagai persekitaran simulasi dan robot sebenar telah membuktikan keunggulan penyelesaian ini.
- Alamat kertas: https://arxiv.org/pdf/2308.03620.pdf
- Alamat projek: https://explore
Kajian Penanda Aras
Data pra-latihan
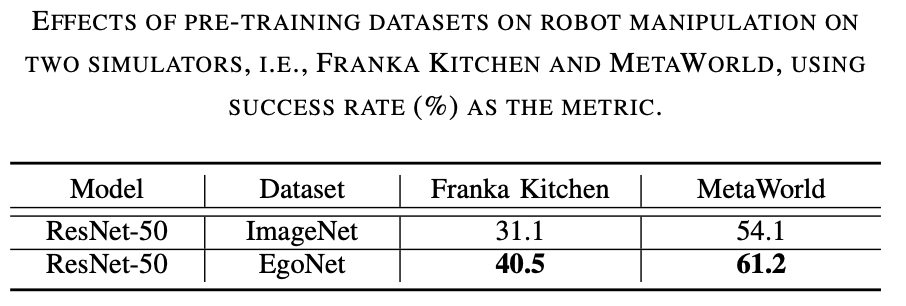
lebih berkuasa daripada ImageNet. Pralatih pengekod visual pada set data yang berbeza (iaitu, ImageNet dan EgoNet) melalui kaedah pembelajaran kontrastif dan perhatikan prestasinya dalam tugasan manipulasi robot. Seperti yang dapat dilihat daripada Jadual 1 di bawah, model yang telah dilatih pada EgoNet mencapai prestasi yang lebih baik pada tugas pengendalian robot. Jelas sekali, robot lebih suka pengetahuan interaktif dan hubungan temporal yang terkandung dalam video dari segi tugas pengendalian. Selain itu, imej semula jadi yang egosentrik dalam EgoNet mempunyai konteks yang lebih global tentang dunia, yang bermaksud ciri visual yang lebih kaya boleh dipelajari
Struktur model
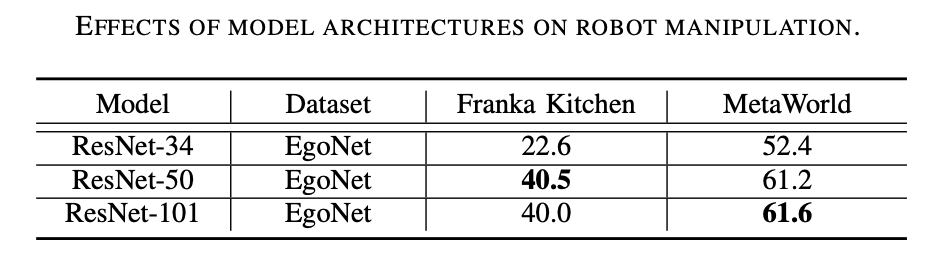
ResNet-50 berprestasi lebih baik. Seperti yang dapat dilihat daripada Jadual 2 di bawah, ResNet-50 dan ResNet-101 berprestasi lebih baik daripada ResNet-34 pada tugasan manipulasi robot. Tambahan pula, prestasi tidak bertambah baik apabila model meningkat daripada ResNet-50 kepada ResNet-101. . di bawah, MoCo-v3 berprestasi baik pada ImageNet dan data EgoNet adalah lebih baik daripada MAE pada semua set, yang membuktikan bahawa pembelajaran kontrastif adalah lebih berkesan daripada pemodelan imej topeng Selain itu, semantik visual yang diperoleh melalui pembelajaran kontrastif adalah lebih penting untuk pengendalian robot daripada maklumat struktur yang dipelajari melalui pemodelan imej topeng. Kandungan yang ditulis semula: Pembelajaran kontrastif adalah kaedah pra-latihan yang diutamakan. Seperti yang dapat dilihat daripada Jadual 3, MoCo-v3 mengatasi MAE pada kedua-dua set data ImageNet dan EgoNet, menunjukkan bahawa pembelajaran kontrastif adalah lebih berkesan daripada pemodelan imej topeng. Di samping itu, semantik visual yang diperolehi melalui pembelajaran kontrastif adalah lebih penting untuk operasi robot berbanding maklumat struktur yang dipelajari melalui pemodelan imej topeng
Pengenalan kepada algoritmaBerdasarkan penerokaan di atas, kajian ini mencadangkan Penyelesaian pra-latihan visi untuk operasi robot (Vi-PRoM). Penyelesaian ini mengekstrak perwakilan visual yang komprehensif bagi operasi robot dengan pra-latihan ResNet-50 pada set data EgoNet. Khususnya, kami mula-mula menggunakan pembelajaran kontrastif untuk mendapatkan corak interaksi antara orang dan objek daripada set data EgoNet melalui penyeliaan kendiri. Kemudian, dua objektif pembelajaran tambahan, iaitu ramalan semantik visual dan ramalan dinamik temporal, dicadangkan untuk memperkayakan lagi perwakilan pengekod. Rajah di bawah menunjukkan proses asas Vi-PROM. Terutama, kajian ini tidak memerlukan pelabelan manual untuk mempelajari semantik visual dan dinamik temporal
Hasil eksperimen
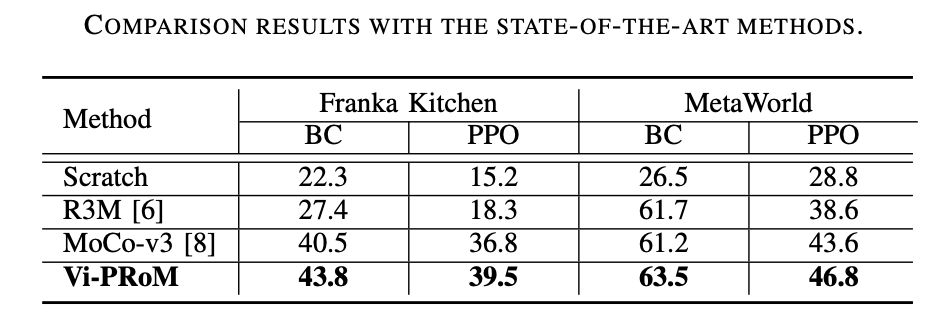
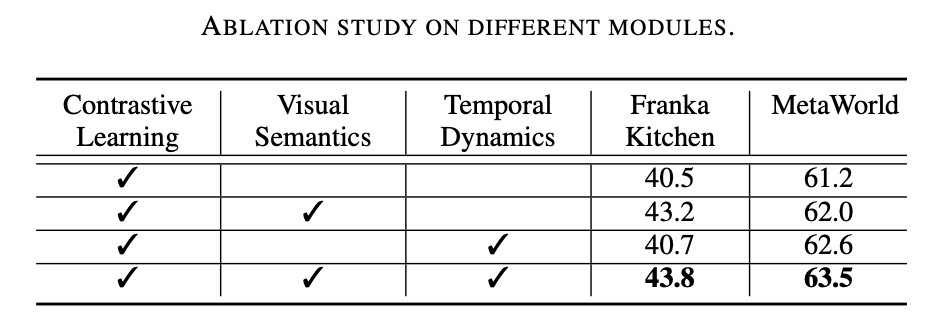
Kerja penyelidikan ini menjalankan eksperimen yang meluas pada dua persekitaran simulasi (Franka Kitchen dan MetaWorld). Keputusan eksperimen menunjukkan bahawa skim pra-latihan yang dicadangkan mengatasi kaedah terkini dalam pengendalian robot. Keputusan eksperimen ablasi ditunjukkan dalam jadual di bawah, yang dapat membuktikan kepentingan pembelajaran semantik visual dan pembelajaran dinamik temporal untuk pengendalian robot. Tambahan pula, apabila kedua-dua sasaran pembelajaran tidak hadir, kadar kejayaan Vi-PRoM menurun dengan ketara, menunjukkan keberkesanan kerjasama antara pembelajaran semantik visual dan pembelajaran dinamik temporal.
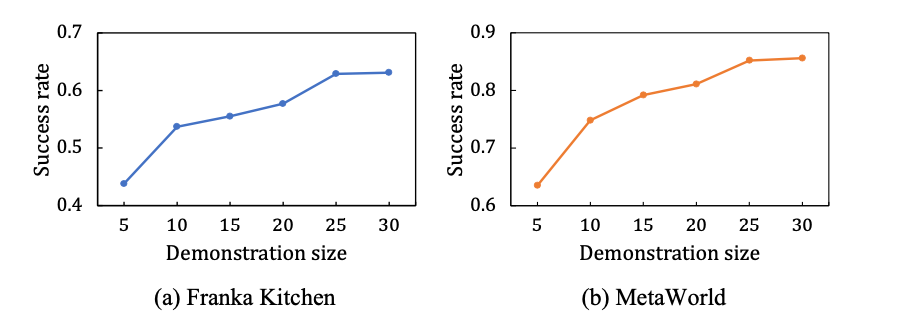
Karya ini juga mengkaji kebolehskalaan Vi-PRoM. Seperti yang ditunjukkan dalam rajah di bawah di sebelah kiri, dalam persekitaran simulasi Franka Kitchen dan MetaWorld, kadar kejayaan Vi-PRoM semakin bertambah baik apabila saiz data demo meningkat. Selepas latihan mengenai set data demonstrasi pakar yang lebih besar, model Vi-PRoM menunjukkan kebolehskalaannya pada tugas manipulasi robot.

Disebabkan keupayaan perwakilan visual Vi-PRoM yang berkuasa, robot sebenar boleh berjaya membuka laci dan pintu kabinet
hasil eksperimen Dapur
dapat dilihat PRoM Ia mempunyai kadar kejayaan yang lebih tinggi dan tahap penyelesaian tindakan yang lebih tinggi daripada R3M dalam lima tugasan.
 R3M:
R3M: 
 Vi-PROM:
Vi-PROM: 
Di MetaWorld, prestasi yang baik telah dipelajari kerana perwakilan visual Vi- PRoM Ciri semantik dan dinamik, ia boleh digunakan dengan lebih baik untuk ramalan tindakan, jadi berbanding R3M, Vi-PRoM memerlukan lebih sedikit langkah untuk menyelesaikan operasi. 🎜🎜🎜🎜R3M: 🎜🎜

Vi-PROM:


Atas ialah kandungan terperinci Tajuk yang ditulis semula: Byte melancarkan program pra-latihan visual Vi-PRoM untuk meningkatkan kadar dan kesan kejayaan operasi robot. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

AI Hentai Generator
Menjana ai hentai secara percuma.

Artikel Panas
Alat panas

Notepad++7.3.1
Editor kod yang mudah digunakan dan percuma

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

Hantar Studio 13.0.1
Persekitaran pembangunan bersepadu PHP yang berkuasa

Dreamweaver CS6
Alat pembangunan web visual

SublimeText3 versi Mac
Perisian penyuntingan kod peringkat Tuhan (SublimeText3)
Topik panas
 1386
1386
 52
52

 Sumber terbuka! Di luar ZoeDepth! DepthFM: Anggaran kedalaman monokular yang cepat dan tepat!
Apr 03, 2024 pm 12:04 PM
Sumber terbuka! Di luar ZoeDepth! DepthFM: Anggaran kedalaman monokular yang cepat dan tepat!
Apr 03, 2024 pm 12:04 PM
0. Apakah fungsi artikel ini? Kami mencadangkan DepthFM: model anggaran kedalaman monokular generatif yang serba boleh dan pantas. Sebagai tambahan kepada tugas anggaran kedalaman tradisional, DepthFM juga menunjukkan keupayaan terkini dalam tugas hiliran seperti mengecat kedalaman. DepthFM cekap dan boleh mensintesis peta kedalaman dalam beberapa langkah inferens. Mari kita baca karya ini bersama-sama ~ 1. Tajuk maklumat kertas: DepthFM: FastMonocularDepthEstimationwithFlowMatching Pengarang: MingGui, JohannesS.Fischer, UlrichPrestel, PingchuanMa, Dmytr
 Model MoE sumber terbuka paling berkuasa di dunia ada di sini, dengan keupayaan bahasa Cina setanding dengan GPT-4, dan harganya hanya hampir satu peratus daripada GPT-4-Turbo
May 07, 2024 pm 04:13 PM
Model MoE sumber terbuka paling berkuasa di dunia ada di sini, dengan keupayaan bahasa Cina setanding dengan GPT-4, dan harganya hanya hampir satu peratus daripada GPT-4-Turbo
May 07, 2024 pm 04:13 PM
Bayangkan model kecerdasan buatan yang bukan sahaja mempunyai keupayaan untuk mengatasi pengkomputeran tradisional, tetapi juga mencapai prestasi yang lebih cekap pada kos yang lebih rendah. Ini bukan fiksyen sains, DeepSeek-V2[1], model MoE sumber terbuka paling berkuasa di dunia ada di sini. DeepSeek-V2 ialah gabungan model bahasa pakar (MoE) yang berkuasa dengan ciri-ciri latihan ekonomi dan inferens yang cekap. Ia terdiri daripada 236B parameter, 21B daripadanya digunakan untuk mengaktifkan setiap penanda. Berbanding dengan DeepSeek67B, DeepSeek-V2 mempunyai prestasi yang lebih kukuh, sambil menjimatkan 42.5% kos latihan, mengurangkan cache KV sebanyak 93.3% dan meningkatkan daya pemprosesan penjanaan maksimum kepada 5.76 kali. DeepSeek ialah sebuah syarikat yang meneroka kecerdasan buatan am
 Apr 09, 2024 am 11:52 AM
Apr 09, 2024 am 11:52 AM
AI memang mengubah matematik. Baru-baru ini, Tao Zhexuan, yang telah mengambil perhatian terhadap isu ini, telah memajukan keluaran terbaru "Buletin Persatuan Matematik Amerika" (Buletin Persatuan Matematik Amerika). Memfokuskan pada topik "Adakah mesin akan mengubah matematik?", ramai ahli matematik menyatakan pendapat mereka Seluruh proses itu penuh dengan percikan api, tegar dan menarik. Penulis mempunyai barisan yang kuat, termasuk pemenang Fields Medal Akshay Venkatesh, ahli matematik China Zheng Lejun, saintis komputer NYU Ernest Davis dan ramai lagi sarjana terkenal dalam industri. Dunia AI telah berubah secara mendadak Anda tahu, banyak artikel ini telah dihantar setahun yang lalu.
 Hello, Atlas elektrik! Robot Boston Dynamics hidup semula, gerakan pelik 180 darjah menakutkan Musk
Apr 18, 2024 pm 07:58 PM
Hello, Atlas elektrik! Robot Boston Dynamics hidup semula, gerakan pelik 180 darjah menakutkan Musk
Apr 18, 2024 pm 07:58 PM
Boston Dynamics Atlas secara rasmi memasuki era robot elektrik! Semalam, Atlas hidraulik hanya "menangis" menarik diri daripada peringkat sejarah Hari ini, Boston Dynamics mengumumkan bahawa Atlas elektrik sedang berfungsi. Nampaknya dalam bidang robot humanoid komersial, Boston Dynamics berazam untuk bersaing dengan Tesla. Selepas video baharu itu dikeluarkan, ia telah pun ditonton oleh lebih sejuta orang dalam masa sepuluh jam sahaja. Orang lama pergi dan peranan baru muncul. Ini adalah keperluan sejarah. Tidak dinafikan bahawa tahun ini adalah tahun letupan robot humanoid. Netizen mengulas: Kemajuan robot telah menjadikan majlis pembukaan tahun ini kelihatan seperti manusia, dan tahap kebebasan adalah jauh lebih besar daripada manusia Tetapi adakah ini benar-benar bukan filem seram? Pada permulaan video, Atlas berbaring dengan tenang di atas tanah, seolah-olah terlentang. Apa yang berikut adalah rahang-jatuh
 KAN, yang menggantikan MLP, telah diperluaskan kepada konvolusi oleh projek sumber terbuka
Jun 01, 2024 pm 10:03 PM
KAN, yang menggantikan MLP, telah diperluaskan kepada konvolusi oleh projek sumber terbuka
Jun 01, 2024 pm 10:03 PM
Awal bulan ini, penyelidik dari MIT dan institusi lain mencadangkan alternatif yang sangat menjanjikan kepada MLP - KAN. KAN mengatasi MLP dari segi ketepatan dan kebolehtafsiran. Dan ia boleh mengatasi prestasi MLP berjalan dengan bilangan parameter yang lebih besar dengan bilangan parameter yang sangat kecil. Sebagai contoh, penulis menyatakan bahawa mereka menggunakan KAN untuk menghasilkan semula keputusan DeepMind dengan rangkaian yang lebih kecil dan tahap automasi yang lebih tinggi. Khususnya, MLP DeepMind mempunyai kira-kira 300,000 parameter, manakala KAN hanya mempunyai kira-kira 200 parameter. KAN mempunyai asas matematik yang kukuh seperti MLP berdasarkan teorem penghampiran universal, manakala KAN berdasarkan teorem perwakilan Kolmogorov-Arnold. Seperti yang ditunjukkan dalam rajah di bawah, KAN telah
 Daya hidup kecerdasan super membangkitkan! Tetapi dengan kedatangan AI yang mengemas kini sendiri, ibu tidak perlu lagi bimbang tentang kesesakan data
Apr 29, 2024 pm 06:55 PM
Daya hidup kecerdasan super membangkitkan! Tetapi dengan kedatangan AI yang mengemas kini sendiri, ibu tidak perlu lagi bimbang tentang kesesakan data
Apr 29, 2024 pm 06:55 PM
Saya menangis hingga mati. Dunia sedang membina model besar. Data di Internet tidak mencukupi. Model latihan kelihatan seperti "The Hunger Games", dan penyelidik AI di seluruh dunia bimbang tentang cara memberi makan data ini kepada pemakan yang rakus. Masalah ini amat ketara dalam tugas berbilang modal. Pada masa mereka mengalami kerugian, pasukan pemula dari Jabatan Universiti Renmin China menggunakan model baharu mereka sendiri untuk menjadi yang pertama di China untuk menjadikan "suapan data yang dijana model itu sendiri" menjadi kenyataan. Selain itu, ia merupakan pendekatan serampang dua mata dari segi pemahaman dan sisi penjanaan Kedua-dua pihak boleh menjana data baharu berbilang modal yang berkualiti tinggi dan memberikan maklum balas data kepada model itu sendiri. Apakah model? Awaker 1.0, model berbilang modal besar yang baru sahaja muncul di Forum Zhongguancun. Siapa pasukan itu? Enjin Sophon. Diasaskan oleh Gao Yizhao, pelajar kedoktoran di Sekolah Kecerdasan Buatan Hillhouse Universiti Renmin.
 Versi Kuaishou Sora 'Ke Ling' dibuka untuk ujian: menghasilkan video lebih 120-an, memahami fizik dengan lebih baik dan boleh memodelkan pergerakan kompleks dengan tepat
Jun 11, 2024 am 09:51 AM
Versi Kuaishou Sora 'Ke Ling' dibuka untuk ujian: menghasilkan video lebih 120-an, memahami fizik dengan lebih baik dan boleh memodelkan pergerakan kompleks dengan tepat
Jun 11, 2024 am 09:51 AM
Apa? Adakah Zootopia dibawa menjadi realiti oleh AI domestik? Didedahkan bersama-sama dengan video itu ialah model penjanaan video domestik berskala besar baharu yang dipanggil "Keling". Sora menggunakan laluan teknikal yang serupa dan menggabungkan beberapa inovasi teknologi yang dibangunkan sendiri untuk menghasilkan video yang bukan sahaja mempunyai pergerakan yang besar dan munasabah, tetapi juga mensimulasikan ciri-ciri dunia fizikal dan mempunyai keupayaan gabungan konsep dan imaginasi yang kuat. Mengikut data, Keling menyokong penjanaan video ultra panjang sehingga 2 minit pada 30fps, dengan resolusi sehingga 1080p dan menyokong berbilang nisbah aspek. Satu lagi perkara penting ialah Keling bukanlah demo atau demonstrasi hasil video yang dikeluarkan oleh makmal, tetapi aplikasi peringkat produk yang dilancarkan oleh Kuaishou, pemain terkemuka dalam bidang video pendek. Selain itu, tumpuan utama adalah untuk menjadi pragmatik, bukan untuk menulis cek kosong, dan pergi ke dalam talian sebaik sahaja ia dikeluarkan Model besar Ke Ling telah pun dikeluarkan di Kuaiying.
 Robot Tesla bekerja di kilang, Musk: Tahap kebebasan tangan akan mencapai 22 tahun ini!
May 06, 2024 pm 04:13 PM
Robot Tesla bekerja di kilang, Musk: Tahap kebebasan tangan akan mencapai 22 tahun ini!
May 06, 2024 pm 04:13 PM
Video terbaru robot Tesla Optimus dikeluarkan, dan ia sudah boleh berfungsi di kilang. Pada kelajuan biasa, ia mengisih bateri (bateri 4680 Tesla) seperti ini: Pegawai itu juga mengeluarkan rupanya pada kelajuan 20x - pada "stesen kerja" kecil, memilih dan memilih dan memilih: Kali ini ia dikeluarkan Salah satu sorotan video itu ialah Optimus menyelesaikan kerja ini di kilang, sepenuhnya secara autonomi, tanpa campur tangan manusia sepanjang proses. Dan dari perspektif Optimus, ia juga boleh mengambil dan meletakkan bateri yang bengkok, memfokuskan pada pembetulan ralat automatik: Berkenaan tangan Optimus, saintis NVIDIA Jim Fan memberikan penilaian yang tinggi: Tangan Optimus adalah robot lima jari di dunia paling cerdik. Tangannya bukan sahaja boleh disentuh
