
 Peranti teknologi
AI
Robot berkaki roda dari Institut Teknologi Harbin ini telah mengeluarkan versi 3.0! Menyahmistifikasi reka bentuk, kawalan dan ujian prestasinya
Peranti teknologi
AI
Robot berkaki roda dari Institut Teknologi Harbin ini telah mengeluarkan versi 3.0! Menyahmistifikasi reka bentuk, kawalan dan ujian prestasinya
Robot berkaki roda dari Institut Teknologi Harbin ini telah mengeluarkan versi 3.0! Menyahmistifikasi reka bentuk, kawalan dan ujian prestasinya

DARPA (Agensi Projek Penyelidikan Lanjutan Pertahanan AS) Cabaran Robot (DRC) diadakan setiap dua tahun dan ditaja oleh Jabatan Pertahanan A.S. Pertandingan ini berharap dapat memilih robot yang boleh bertanggungjawab terhadap bahaya seperti Kuasa Nuklear Fukushima Tumbuhan yang tidak boleh diakses oleh manusia untuk misi pertolongan cemas di tapak.
Dalam Cabaran Robot DARPA DRC 2015, robot DRC-HUBO dari Korea Selatan bergantung pada "kemahiran unik" untuk mengalahkan 22 robot terkemuka lain dari 5 negara dan memenangi kejuaraan, termasuk banyak robot yang dibangunkan oleh Boston Dynamics pada masa itu Robot bintang seperti Atlas dan HRP Jepun.
DRC-HUBO ialah robot yang boleh berdiri dan melutut
Dalam bidang robotik, imbangan berjalan sentiasa menjadi jurang yang tidak dapat diatasi. Ini juga merupakan kunci kepada kemenangan terakhir HUBO - Roda yang dipasang pada lutut dan buku lali membolehkan robot bertukar daripada mod berjalan kepada pergerakan beroda. Pasukan "KAIST" yang membangunkannya juga memenangi hadiah utama sebanyak AS$2 juta pada masa itu.
Penjelajahan dan penyelamatan dalam persekitaran berbahaya ialah aplikasi penting pergerakan kaki robot Robot yang digunakan untuk menyelamat bencana atau penerokaan lapangan selalunya diperlukan untuk mempunyai keupayaan untuk bergerak dengan cepat di jalan rata dan menyesuaikan diri dengan rupa bumi yang kompleks. Berdasarkan masalah ini, pasukan dari Makmal Utama Robotik dan Sistem Negeri, Pusat Pengajian Kejuruteraan Mekanikal dan Elektrik, Institut Teknologi Harbin, membangunkan sistem robot berkaki roda autonomi berkuasa hidraulik yang sangat mudah dikendalikan dan boleh disesuaikan - robot WLR-3P. Robot boleh bergerak dengan pantas dan cekap di jalan rata, dan kebolehsuaiannya sangat baik dalam persekitaran rupa bumi yang lasak.
Penyelidikan ini diterbitkan di bawah tajuk kertas kerja (Design and Control for WLR-3P: A Hydraulic Wheel-Legged Robot) dalam Cyborg and Bionic Systems, terbitan baharu Pelan Tindakan Kecemerlangan Jurnal Sains dan Teknologi China Titik Permulaan Tinggi.
▍Menyingkap misteri robot WLR-3P
Mari kita lihat dahulu rupa WLR-3P:

robot berkaki roda hidraulik tanpa hos baharu, WLR-3P mampu melompat dan bergerak pantas dengan kuasa autonomi.
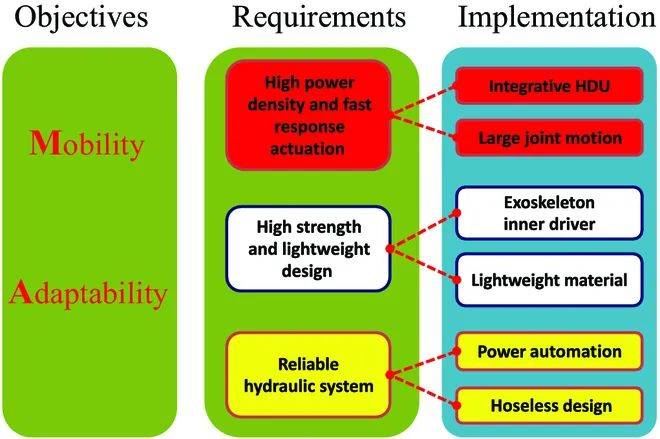
Jadi bagaimana penyelidik meningkatkanmobiliti dan kebolehsuaian persekitaran robot? Terutama bergantung padatiga perkara ini: (a) ketumpatan kuasa tinggi dan pemacu tindak balas pantas, (b) ringan, inersia besar dan kekuatan tinggi, (c) sistem hidraulik yang boleh dipercayai.
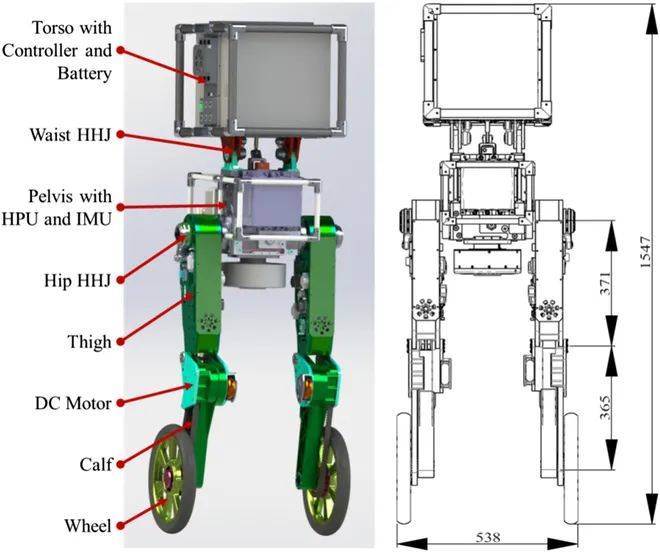
Seperti yang ditunjukkan dalam imej di atas, WLR-3P mempunyai 7 darjah kebebasan (DOF): 3 DOF untuk setiap kaki dan 1 DOF di pinggang. Tiga darjah kebebasan kaki masing-masing pada sendi pinggul, sendi lutut dan roda pemanduan Sendi pinggul dan sendi lutut digerakkan oleh HDU, dan roda pemanduan digerakkan oleh motor DC.
HDU termasuk silinder servo tindak balas frekuensi tinggi (20Hz), injap servo berprestasi tinggi, sensor anjakan dan sensor daya. WLR-3P mempunyai berat 80 kg dan dilengkapi dengan HPU dan bateri atas kapal. Ketinggian maksimum ialah 1.55 meter dan jarak antara dua roda adalah lebih kurang 0.54 meter. Selain itu, atas sebab keselamatan, robot itu juga "membawa" rangka aloi aluminium hibrid gentian karbon 1.8 kg
Mengapa memilih hidraulik? Secara ringkas dan kasar,
Sebuah robot yang menggunakan peranti pemacu hidraulik bersepadu mempunyai ketumpatan kuasa tinggi dan tindak balas pemacu yang pantas.
▍WLR-3P strategi kawalan dan reka bentuk lanjutan
Penyelidik mengambil kira faktor berikut: (a) nisbah kuasa-kepada-berat yang tinggi, (b) rintangan hentaman yang sangat baik, (c) tindak balas frekuensi tinggi untuk kawalan daya/kedudukan, dan (d) sifat biologi yang setanding dengan manusia.
Ketumpatan kuasa maksimum unit pemacu hidraulik sendi lutut (HDU) dalam WLR-3P boleh mencapai kira-kira 7kW/kg, yang jauh lebih tinggi daripada motor tradisional. Kandungan ditulis semula: Ketumpatan kuasa maksimum unit pemacu hidraulik lutut (HDU) dalam WLR-3P ialah lebih kurang 7 kW/kg, jauh melebihi motor konvensional
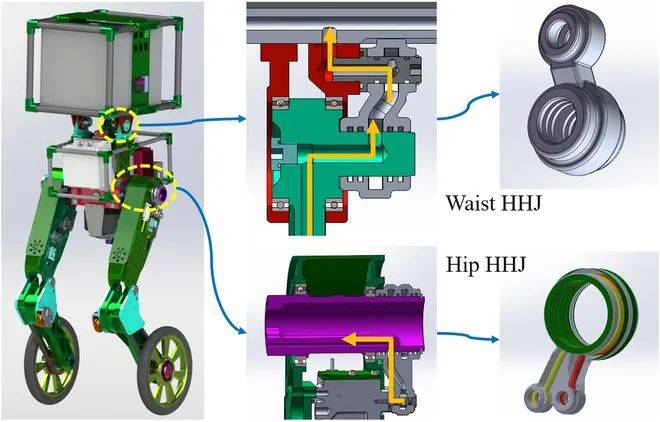
WLR-3P pinggul dan pinggang HHJ
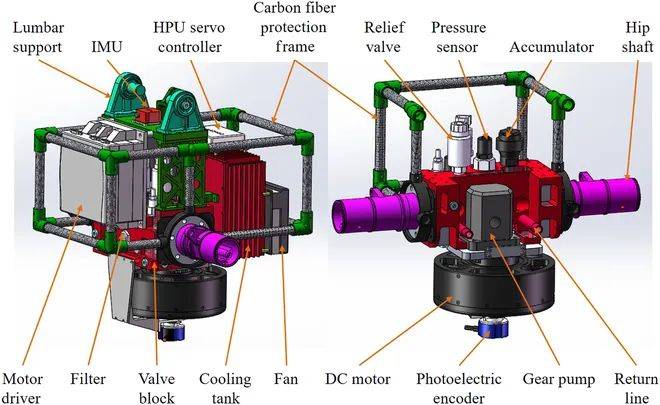
Pengecilan dan penyepaduan unit kuasa hidraulik (HPU) adalah kesukaran utama dalam bidang penyelidikan robot hidraulik, terutamanya disebabkan oleh pengecilan pam dan enjin serta pemanasan sistem. Memandangkan WLR-3P tidak mempunyai ruang pemasangan HPU yang besar. Kakitangan R&D telah mencadangkan idea reka bentuk yang inovatif untuk mencapai pengecilan dan penyepaduan HPU.
Pertama, pam gear digerakkan oleh motor pemutar luaran yang dibuat khas melalui gandingan mikro. Minyak tekanan tinggi dari pam melalui penumpuk mikro dan penapis untuk memberikan kuasa hidraulik yang diperlukan oleh sistem. Kedua, untuk menyelesaikan masalah pemanasan sistem, tangki bahan api pelbagai fungsi yang menyepadukan pelesapan haba, penapisan dan penstabilan voltan telah direka. Akhirnya, HPU boleh mengeluarkan kuasa hidraulik dengan tekanan maksimum 21 MPa dan kadar aliran 20 l/min.
Rajah di bawah menunjukkan struktur dan komposisi HPU.
Pengecilan dan penyepaduan HPU membebaskan robot daripada batasan hos getah, menjadikan pergerakan robot lebih "sutera".
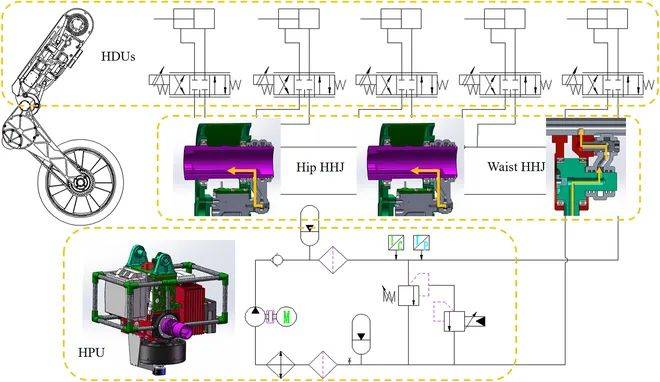
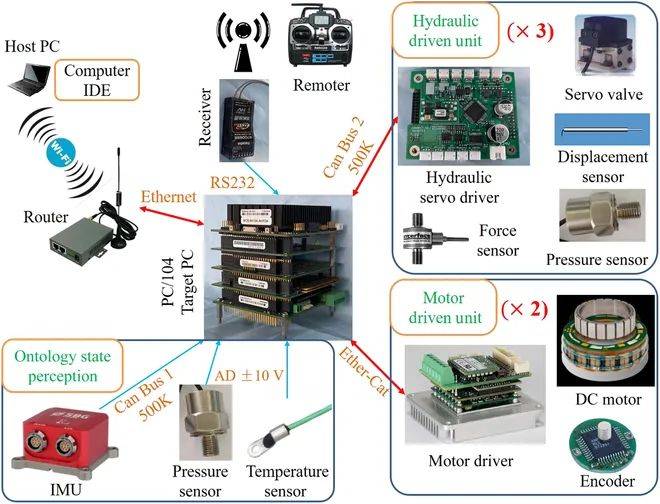
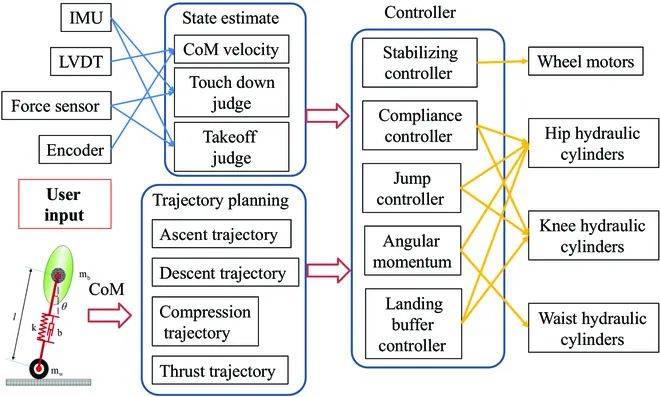
Selain itu, pasukan R&D juga mencadangkan
sistem kawalan termasuk sistem elektrik teragih hierarki dan strategi kawalan:
Kandungan yang perlu ditulis semula ialah: ▍Imbangan dan ujian kuasa letupan WLR-3P
Penyelidik menjalankan ujian sekitarprestasi seimbang dan kuasa letupan. Pergerakan pantas dan mencangkung adalah tindakan paling asas untuk mengesahkan prestasi keseimbangan robot berkaki roda. Apabila bergerak dengan pantas, pusat jisim (COM) robot berubah dengan cepat dalam arah mendatar, manakala apabila mencangkung, COM berubah dengan cepat dalam arah menegak.
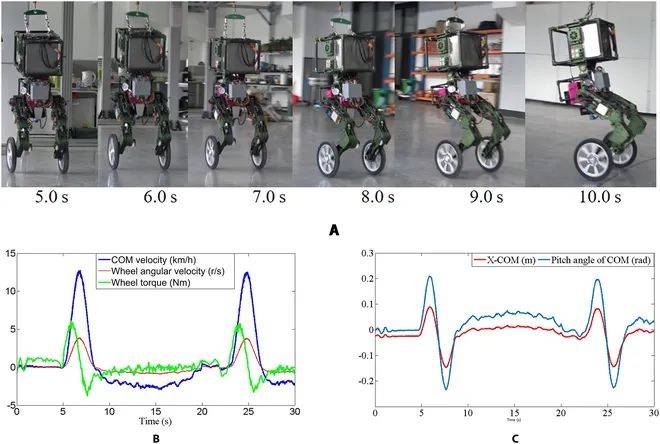
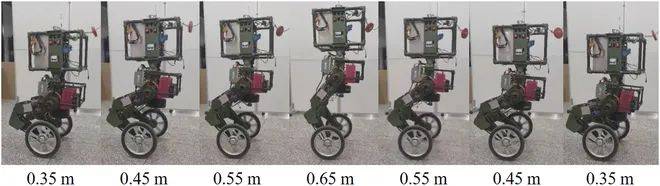
Ujian menunjukkan bahawa keupayaan imbangan mendatar dan menegak WLR-3P adalah OK, yang turut mengesahkan kebolehpercayaan sistem perkakasan robot.
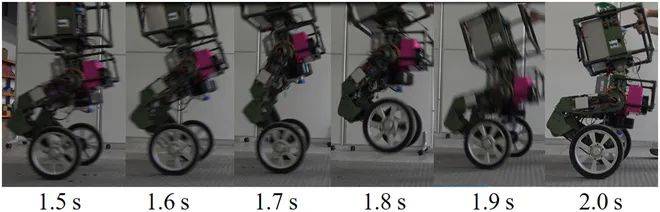
Hasil eksperimen menunjukkan robot WLR-3P boleh mencapai kelajuan 13.6 km/j dan ketinggian lompatan 0.2 m. Pemacu hidraulik dan tetapan struktur robot diperakui sepenuhnya.

semakin ringan berat robot dan semakin kuat kuasa letupan sistem pemacu, semakin tinggi robot itu boleh melompat. Khususnya, lebih kecil bahagian berat kaki kepada berat badan, lebih tinggi daya keluaran serta-merta dan kelajuan sendi lutut, yang akan memberi kesan yang lebih ketara ke atas prestasi melompat robot.
Kandungan yang perlu ditulis semula ialah: ▍Dua "saudara" WLR-3P
Pasukan menyatakan bahawa walaupun masih terdapat jurang tertentu antara prestasi sebenar dan prestasi reka bentuk teori, ini juga menunjukkan jalan untuk kerja masa depanPada 2017, pasukan itu telah membangunkan robot berkaki roda hidraulik pertama WLR-I dan berjaya mengesahkan reka bentuk bersepadu dan keupayaan pergerakan kompaunnya. Kemudian pada 2018, robot berkaki roda generasi kedua WLR-II keluar, merealisasikan reka bentuk tanpa hos buat kali pertama dan menunjukkan kebolehsuaian rupa bumi yang tidak dijangka
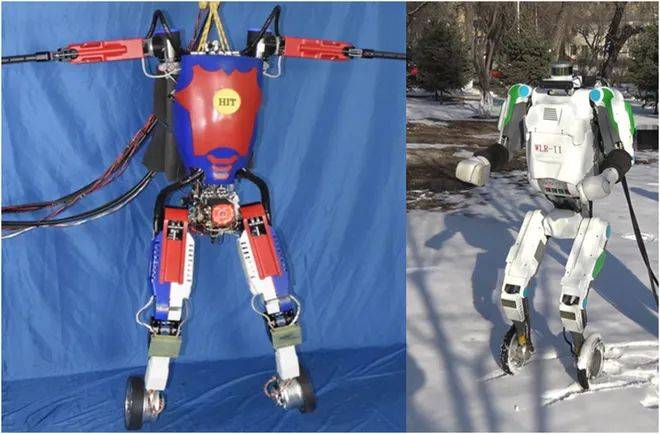
Dua beradik sedang menjalankan senaman bersama dan ujian pergerakan salji
Seperti yang ditunjukkan dalam gambar di atas, dua generasi pertama robot sebenarnya telah mengesahkan kebolehsuaian kepada rupa bumi yang kompleks dan kebolehgerakan di atas tanah, tetapi kedua-duanya dikuasakan oleh stesen pam luaran. Kali ini WLR-3P telah membuat penambahbaikan yang ketara berdasarkan reka bentuk dua generasi pertama robot berkaki roda. Bukan sahaja meningkatkan keupayaan olahraga, tetapi juga mencapai autonomi kuasa.
Seterusnya, pasukan juga perlu mempertimbangkan cara memadankan kuasa keluaran HPU dan kuasa yang diperlukan oleh HDU. Mengenai keperluan untuk kuasa memandu dan pergerakan robot, isu kejuruteraan seperti pelesapan haba dan bunyi bising perlu dipertimbangkan. Lebih penting lagi, pengecilan dan penyesuaian komponen hidraulik juga merupakan salah satu hala tuju penyelidikan masa hadapan.
Saya perlu katakan, kecekapannya terlalu tinggi. Lepas tu berhenti cakap kosong dan tunggu abang keempat WLR.
Atas ialah kandungan terperinci Robot berkaki roda dari Institut Teknologi Harbin ini telah mengeluarkan versi 3.0! Menyahmistifikasi reka bentuk, kawalan dan ujian prestasinya. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

AI Hentai Generator
Menjana ai hentai secara percuma.

Artikel Panas
Alat panas

Notepad++7.3.1
Editor kod yang mudah digunakan dan percuma

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

Hantar Studio 13.0.1
Persekitaran pembangunan bersepadu PHP yang berkuasa

Dreamweaver CS6
Alat pembangunan web visual

SublimeText3 versi Mac
Perisian penyuntingan kod peringkat Tuhan (SublimeText3)
Topik panas
 1378
1378
 52
52

 Xiaohongshu mula menguji AI chatbot 'Da Vinci'
Jan 15, 2024 pm 12:42 PM
Xiaohongshu mula menguji AI chatbot 'Da Vinci'
Jan 15, 2024 pm 12:42 PM
Xiaohongshu sedang berusaha untuk memperkayakan produknya dengan menambahkan lebih banyak ciri kecerdasan buatan Menurut laporan media domestik, Xiaohongshu sedang menguji aplikasi AI yang dipanggil "Davinci" dalam aplikasi utamanya. Dilaporkan bahawa aplikasi itu boleh menyediakan pengguna dengan perkhidmatan sembang AI seperti soal jawab pintar, termasuk panduan perjalanan, panduan makanan, pengetahuan geografi dan budaya, kemahiran hidup, pertumbuhan peribadi dan pembinaan psikologi, dll. Menurut laporan, "Davinci" menggunakan model LLAMA di bawah produk Meta A untuk latihan, produk tersebut telah diuji sejak September tahun ini. Terdapat khabar angin bahawa Xiaohongshu juga sedang menjalankan ujian dalaman fungsi perbualan AI kumpulan. Di bawah fungsi ini, pengguna boleh mencipta atau memperkenalkan aksara AI dalam sembang kumpulan, dan mengadakan perbualan dan interaksi dengan mereka Sumber imej: T
 Selesaikan masalah 'ralat: jangkaan primer-ungkapan sebelum token ')' dalam kod C++
Aug 27, 2023 pm 12:28 PM
Selesaikan masalah 'ralat: jangkaan primer-ungkapan sebelum token ')' dalam kod C++
Aug 27, 2023 pm 12:28 PM
Selesaikan masalah "error:expectedprimary-expressionbefore')'token" dalam kod C++ Dalam pengaturcaraan C++, kadangkala kita menghadapi beberapa gesaan ralat, seperti "expectedprimary-expressionbefore')'token. Ralat ini biasanya disebabkan oleh sintaks atau ungkapan yang salah digunakan dalam kod, menyebabkan pengkompil gagal memahami maksud kod. Artikel ini akan
 Mengapa sambungan rangkaian dalam win11 kosong?
Jan 11, 2024 pm 06:21 PM
Mengapa sambungan rangkaian dalam win11 kosong?
Jan 11, 2024 pm 06:21 PM
Semasa cuba mengubah suai kaedah sambungan rangkaian, sesetengah pengguna secara tidak sengaja mendapati bahawa penyesuai rangkaian dibuka semasa proses pensuisan kosong, menyebabkan mereka tidak dapat menyelesaikan operasi pensuisan dengan jayanya. Menghadapi dilema seperti itu, bagaimanakah kita harus menyelesaikan masalah ini? terlalu lama. Penyelesaian: Tingkatkan atau pasang semula pemacu penyesuai rangkaian yang sepadan. 2. Masalah perkakasan: Perkakasan penyesuai rangkaian mengalami kerosakan fizikal atau kegagalan sepenuhnya. Penyelesaian: Gantikan perkakasan penyesuai rangkaian asal. 3. Masalah tetapan sistem Penyelesaian kepada ralat tetapan sistem Win11 pada komputer: Kita boleh
 Bagaimana untuk mematikan Lenovo Win10 Firewall Pengenalan kepada cara mematikan Lenovo Win10 Firewall.
Jul 13, 2023 pm 01:33 PM
Bagaimana untuk mematikan Lenovo Win10 Firewall Pengenalan kepada cara mematikan Lenovo Win10 Firewall.
Jul 13, 2023 pm 01:33 PM
Bagaimana untuk mematikan tembok api Lenovo Win10? Firewall boleh memberikan pengguna pengalaman rangkaian komputer yang lebih baik dan selamat Baru-baru ini, beberapa pengguna bertanya bagaimana untuk mematikan firewall pada komputer Lenovo Win10 Malah, kaedahnya sangat mudah. Pengenalan kepada cara mematikan tembok api Lenovo Win10 1. Klik Tetapan, masukkan "Panel Kawalan", dan buka "Panel Kawalan". 2. Cari "Windows Firewall". 3. Klik "Hidupkan atau matikan Windows Defender Firewall". 4. Pilih Tutup dan sahkan.
 Kemahiran pelaksanaan fungsi berbilang tugas dan penjadualan C++ dalam pembangunan sistem terbenam
Aug 27, 2023 pm 03:42 PM
Kemahiran pelaksanaan fungsi berbilang tugas dan penjadualan C++ dalam pembangunan sistem terbenam
Aug 27, 2023 pm 03:42 PM
Kemahiran pelaksanaan fungsi berbilang tugas dan penjadualan C++ dalam pembangunan sistem terbenam Sistem terbenam merujuk kepada sistem komputer yang dibenamkan dalam peranti lain dan berfungsi sebagai fungsi khusus. Sistem ini biasanya perlu mengendalikan berbilang tugas secara serentak dan melaksanakan penjadualan tugas yang fleksibel. Dalam pembangunan sistem terbenam, C++ ialah bahasa pengaturcaraan yang digunakan secara meluas yang menyediakan banyak ciri berkuasa untuk memenuhi keperluan multitasking dan penjadualan. Artikel ini akan memperkenalkan beberapa teknik C++ untuk melaksanakan pelbagai tugas dan penjadualan dalam sistem terbenam, dan menerangkannya melalui contoh kod.
 Bagaimana untuk membersihkan sistem win7 apabila pemacu komputer C penuh
Jul 09, 2023 pm 04:05 PM
Bagaimana untuk membersihkan sistem win7 apabila pemacu komputer C penuh
Jul 09, 2023 pm 04:05 PM
Setelah menjalankan sistem win7 untuk satu tempoh masa, saya dapati ruang pemacu C semakin mengecil Saiz ruang pemacu C adalah berkaitan dengan kelajuan sistem. Apakah yang perlu dilakukan oleh sesetengah pengguna apabila mereka menghadapi situasi di mana pemacu C sistem win7 tiba-tiba penuh? Biar saya ajar anda cara membersihkan pemacu C pada komputer win7 anda. 1. Klik kanan pada pemacu C - Properties, skrin berikut akan muncul, klik Disk Cleanup. 2. Apabila skrin berikut muncul, semak semua, klik OK, dan bersihkan terus. 3. Klik kanan komputer - Properties - System Protection, klik Konfigurasi, dan kemudian pilih Padam. 4. Tukar tab kepada Lanjutan dan klik Tetapan. 5. Tetapkan memori maya dan klik Tukar. 6. Nyahtanda Urus saiz fail paging secara automatik untuk semua pemacu, kemudian pilih pemacu C, pilih Tiada fail paging, dan tetapkan tetapan memori maya kepada
 Di mana hendak membuka Panel Kawalan Windows 7 Pengenalan terperinci kepada bahagian pembukaan Panel Kawalan Windows 7
Jul 09, 2023 pm 12:45 PM
Di mana hendak membuka Panel Kawalan Windows 7 Pengenalan terperinci kepada bahagian pembukaan Panel Kawalan Windows 7
Jul 09, 2023 pm 12:45 PM
Ramai pengguna tidak tahu di mana untuk membuka panel kawalan Windows 7 Sebenarnya, sangat mudah untuk membuka panel kawalan komputer Windows 7 Pertama, kita klik kanan tetikus untuk membuka halaman sifat komputer halaman, anda boleh melihat panel kawalan dan klik untuk membukanya. Buka panel kawalan Windows 7 dan anda boleh membuat satu siri tetapan untuk menjadikan operasi komputer lebih selesa dan mudah. Pengenalan terperinci untuk membuka panel kawalan windows 7 1. Klik kanan ikon desktop komputer 2. Klik [Properties] 3. Klik [Control Panel] dalam direktori di mana sifat komputer berada 4. Anda boleh membuka halaman tetapan panel kawalan
 Enjin templat fungsi JavaScript: alat berkuasa untuk menjana HTML secara dinamik
Nov 18, 2023 pm 12:41 PM
Enjin templat fungsi JavaScript: alat berkuasa untuk menjana HTML secara dinamik
Nov 18, 2023 pm 12:41 PM
Enjin templat fungsi JavaScript: alat yang berkuasa untuk menjana HTML secara dinamik Dalam pembangunan bahagian hadapan, penjanaan HTML secara dinamik adalah keperluan biasa, contohnya: memaparkan hasil carian berdasarkan maklumat yang dimasukkan oleh pengguna, memaparkan halaman secara dinamik berdasarkan data yang masuk daripada. latar belakang, dsb. Dalam pembangunan front-end tradisional, kami biasanya menggunakan penggabungan rentetan untuk menjana kod HTML dinamik. Walau bagaimanapun, kaedah ini mempunyai banyak batasan, seperti kebolehbacaan yang lemah, mudah ralat, dan penyelenggaraan yang sukar. Enjin templat fungsi JavaScript boleh menjadi sangat baik
