
 Peranti teknologi
AI
Memanjat, melompat, dan melintasi celah sempit, strategi pembelajaran pengukuhan sumber terbuka membolehkan anjing robot untuk parkour
Peranti teknologi
AI
Memanjat, melompat, dan melintasi celah sempit, strategi pembelajaran pengukuhan sumber terbuka membolehkan anjing robot untuk parkour
Memanjat, melompat, dan melintasi celah sempit, strategi pembelajaran pengukuhan sumber terbuka membolehkan anjing robot untuk parkour

Parkour ialah sukan lasak Ia merupakan satu cabaran besar untuk robot, terutamanya anjing robot berkaki empat, yang perlu cepat mengatasi pelbagai halangan dalam persekitaran yang kompleks. Sesetengah kajian telah cuba menggunakan data haiwan rujukan atau ganjaran yang kompleks, tetapi pendekatan ini menjana kemahiran parkour yang sama ada pelbagai tetapi buta, atau berasaskan penglihatan tetapi khusus adegan. Walau bagaimanapun, parkour autonomi memerlukan robot untuk mempelajari kemahiran am berasaskan penglihatan dan pelbagai untuk melihat pelbagai senario dan bertindak balas dengan cepat.
Baru-baru ini, video parkour anjing robot menjadi viral Anjing robot dalam video itu dengan pantas mengatasi pelbagai halangan dalam pelbagai senario. Sebagai contoh, melalui celah di bawah plat besi, panjat kotak kayu, dan kemudian lompat ke kotak kayu yang lain Satu siri pergerakan lancar dan lancar:
#🎜🎜. # # 🎜🎜#
# 🎜🎜#

#🎜 Ia juga mempunyai kemahiran istimewa: Mampu memerah melalui celah sempit pada sudut

 #🎜 Jika anjing robot itu gagal melepasi halangan, ia akan mencuba beberapa kali lagi:
#🎜 Jika anjing robot itu gagal melepasi halangan, ia akan mencuba beberapa kali lagi:
Kandungan ini telah ditulis semula ke dalam bahasa Cina: Anjing robot ini berdasarkan rangka kerja pembelajaran kemahiran "parkour" yang dibangunkan untuk robot kos rendah. Rangka kerja itu dicadangkan bersama oleh penyelidik dari Institut Penyelidikan Qizhi Shanghai, Universiti Stanford, Universiti ShanghaiTech, CMU dan Universiti Tsinghua, dan kertas penyelidikannya telah dipilih untuk CoRL 2023 (Lisan). Projek penyelidikan ini telah menjadi sumber terbuka
Alamat kertas: https://arxiv.org/abs/2309.05665 🎜🎜 #
 Alamat projek: https://github.com/ZiwenZhuang/parkour
Alamat projek: https://github.com/ZiwenZhuang/parkour
#🎜hod🎜 Introduction🎜 ## 🎜🎜#
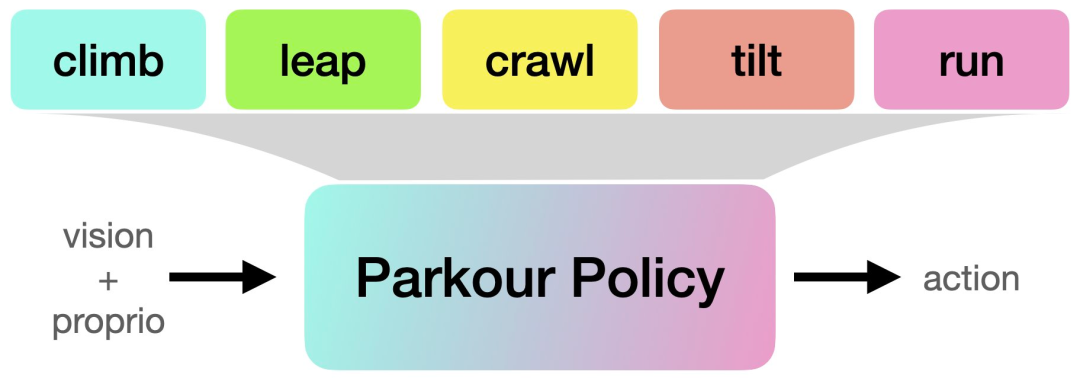
Penyelidikan ini memperkenalkan sistem sumber terbuka baharu untuk mempelajari strategi parkour berasaskan penglihatan hujung ke hujung untuk mempelajari pelbagai kemahiran parkour menggunakan ganjaran mudah tanpa memerlukan Sebarang data pergerakan rujukan.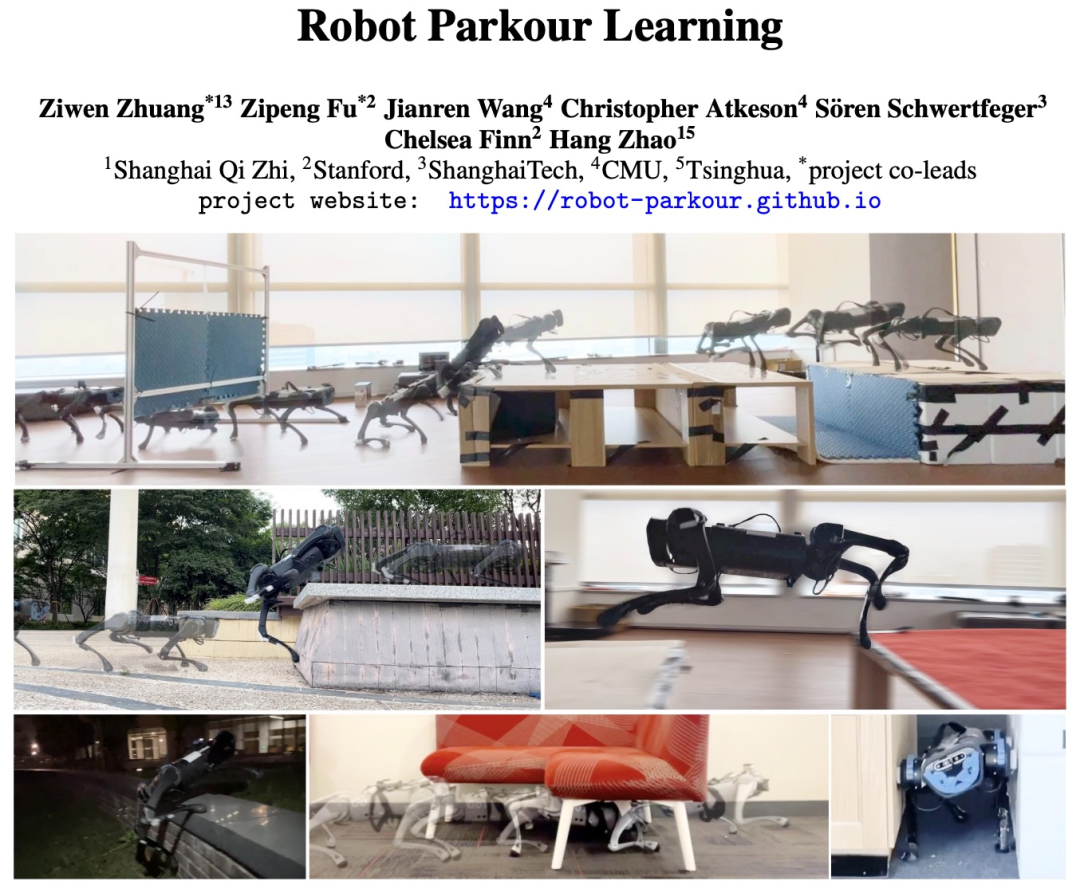
Secara khusus, penyelidikan ini mencadangkan kaedah pembelajaran pengukuhan yang direka untuk membolehkan robot belajar memanjat halangan yang tinggi, melompat melepasi jurang yang besar, dan mengemudi di bawah halangan yang rendah seperti merangkak, merempit melalui celah sempit, dan berlari, dan menukar kemahiran ini menjadi strategi parkour berdasarkan satu penglihatan. Pada masa yang sama, kemahiran ini dipindahkan kepada robot berkaki empat dengan menggunakan kamera kedalaman egosentrik untuk hanya menggunakan pengkomputeran atas kapal (Nvidia Jetson), kamera kedalaman atas kapal (Intel Realsense) dan kuasa atas kapal tanpa memerlukan tangkapan gerakan, lidar, pelbagai kamera kedalaman dan banyak pengkomputeran #🎜🎜 #
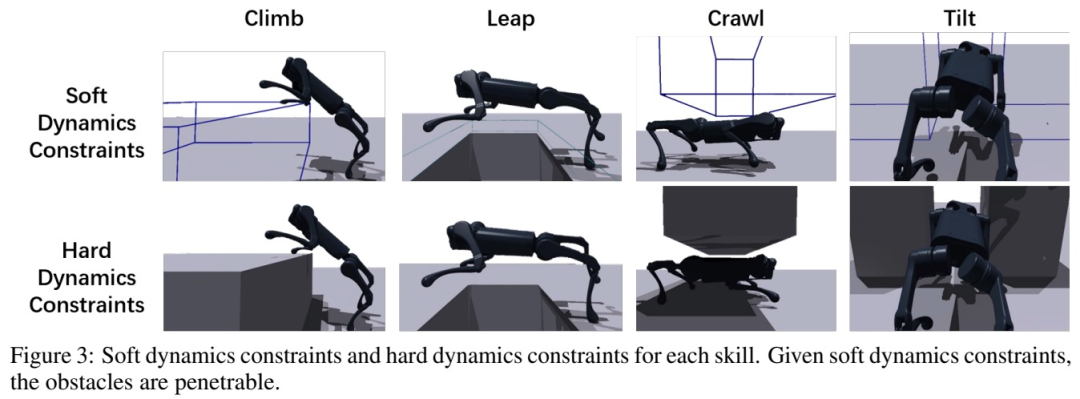
Untuk melatih strategi parkour, penyelidikan menjalankan tiga peringkat kerja berikut:Peringkat pertama: pembelajaran pengukuhan pra-Latihan, dengan kekangan dinamik lembut. Penyelidikan ini menggunakan kursus automatik untuk membolehkan robot belajar merentas halangan, menggalakkan robot belajar secara beransur-ansur untuk mengatasi halangan
Peringkat kedua: pembelajaran pengukuhan dengan penalaan keras kekangan dinamik. Penyelidikan menguatkuasakan semua kekangan dinamik pada peringkat ini dan menggunakan dinamik realistik untuk memperhalusi tingkah laku robot yang dipelajari dalam peringkat pra-latihan.
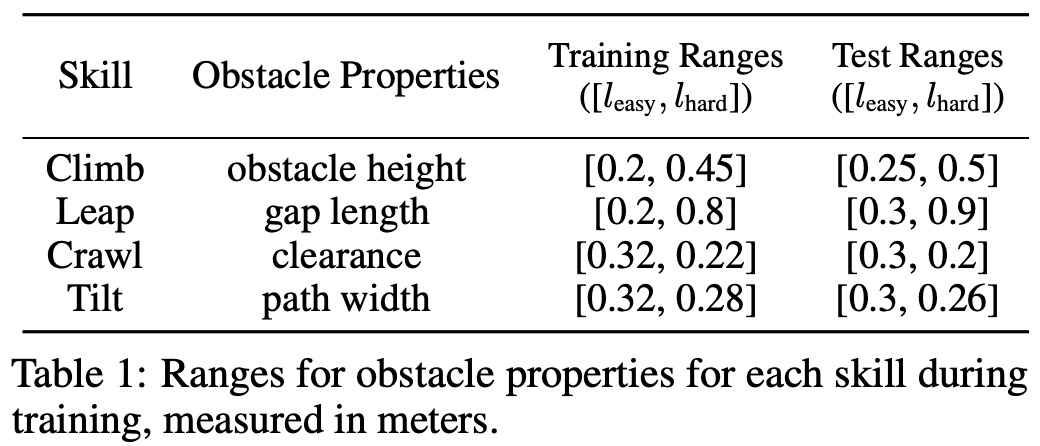
Peringkat ketiga: penyulingan. Selepas mempelajari setiap kemahiran parkour individu, kajian menggunakan DAgger untuk menyaringnya ke dalam dasar parkour berasaskan penglihatan (diparameterkan oleh RNN) yang boleh digunakan pada robot berkaki hanya menggunakan persepsi dan pengiraan atas kapal. Dalam latihan, kajian menetapkan saiz halangan yang sepadan untuk setiap kemahiran, seperti ditunjukkan dalam Jadual 1 di bawah:
Eksperimen dan keputusan
 tion dan nyata -eksperimen kehidupan telah dijalankan, dan keputusan menunjukkan bahawa strategi parkour membolehkan robot berkaki empat kos rendah memilih dan melaksanakan kemahiran parkour yang sesuai untuk melintasi hanya menggunakan pengkomputeran onboard, penderiaan visual onboard dan persekitaran yang mencabar di dunia terbuka, termasuk memanjat halangan sehingga 0.40m (1.53x ketinggian robot), melompat melepasi jurang besar sehingga 0.60m (1.5x panjang robot), dan melompat melepasi halangan serendah 0.2m (0.76x ketinggian robot) Ia boleh merangkak di bawah objek, memerah melalui celah sempit 0.28m (kurang daripada lebar robot) dengan mencondongkan, dan boleh terus berlari ke hadapan.
tion dan nyata -eksperimen kehidupan telah dijalankan, dan keputusan menunjukkan bahawa strategi parkour membolehkan robot berkaki empat kos rendah memilih dan melaksanakan kemahiran parkour yang sesuai untuk melintasi hanya menggunakan pengkomputeran onboard, penderiaan visual onboard dan persekitaran yang mencabar di dunia terbuka, termasuk memanjat halangan sehingga 0.40m (1.53x ketinggian robot), melompat melepasi jurang besar sehingga 0.60m (1.5x panjang robot), dan melompat melepasi halangan serendah 0.2m (0.76x ketinggian robot) Ia boleh merangkak di bawah objek, memerah melalui celah sempit 0.28m (kurang daripada lebar robot) dengan mencondongkan, dan boleh terus berlari ke hadapan. 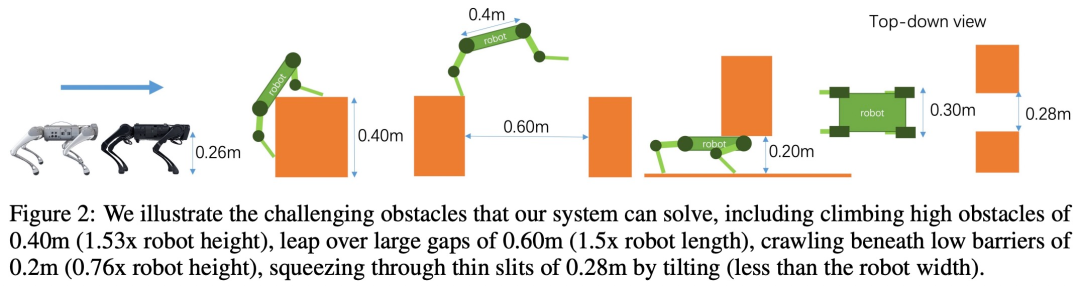
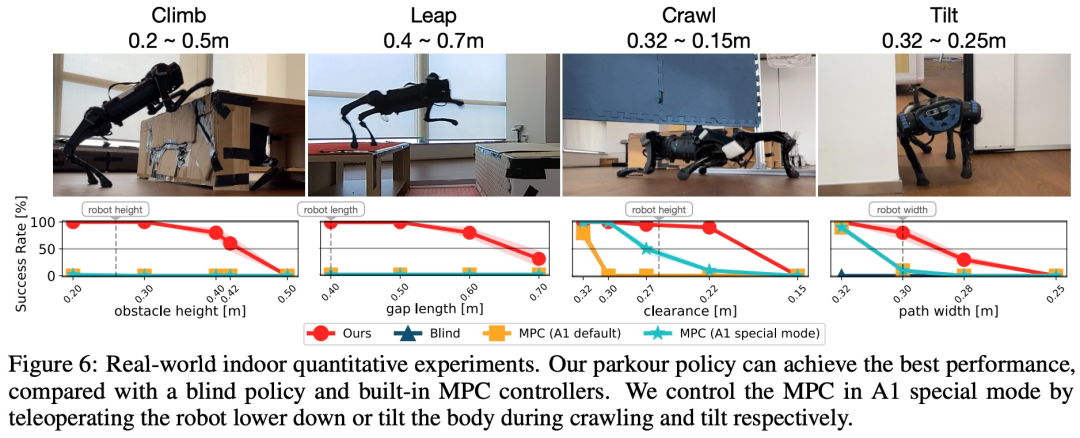 Selain itu, kajian juga membandingkan kaedah yang dicadangkan dengan beberapa kaedah asas dan menjalankan eksperimen ablasi dalam persekitaran simulasi. Keputusan khusus ditunjukkan dalam Jadual 2:
Selain itu, kajian juga membandingkan kaedah yang dicadangkan dengan beberapa kaedah asas dan menjalankan eksperimen ablasi dalam persekitaran simulasi. Keputusan khusus ditunjukkan dalam Jadual 2: 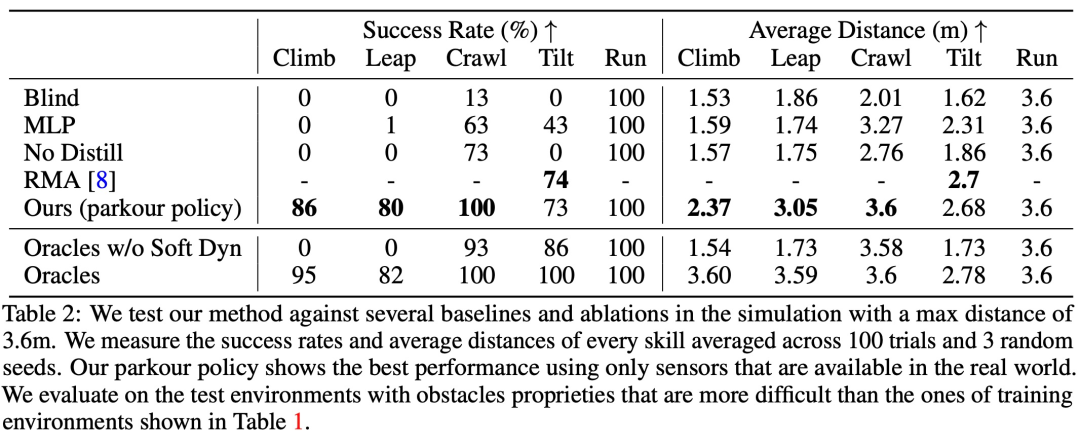 Pembaca yang berminat boleh membaca kertas asal untuk mengetahui lebih lanjut tentang kandungan penyelidikan
Pembaca yang berminat boleh membaca kertas asal untuk mengetahui lebih lanjut tentang kandungan penyelidikan
Atas ialah kandungan terperinci Memanjat, melompat, dan melintasi celah sempit, strategi pembelajaran pengukuhan sumber terbuka membolehkan anjing robot untuk parkour. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

Video Face Swap
Tukar muka dalam mana-mana video dengan mudah menggunakan alat tukar muka AI percuma kami!

Artikel Panas
Alat panas

Notepad++7.3.1
Editor kod yang mudah digunakan dan percuma

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

Hantar Studio 13.0.1
Persekitaran pembangunan bersepadu PHP yang berkuasa

Dreamweaver CS6
Alat pembangunan web visual

SublimeText3 versi Mac
Perisian penyuntingan kod peringkat Tuhan (SublimeText3)
Topik panas
 1393
1393
 52
1205
24
52
1205
24

 Platform Perdagangan Web3 Ranking_Web3 Global Exchanges Top Ten Ringkasan
Apr 21, 2025 am 10:45 AM
Platform Perdagangan Web3 Ranking_Web3 Global Exchanges Top Ten Ringkasan
Apr 21, 2025 am 10:45 AM
Binance adalah tuan rumah ekosistem perdagangan aset digital global, dan ciri -cirinya termasuk: 1. Jumlah dagangan harian purata melebihi $ 150 bilion, menyokong 500 pasangan perdagangan, yang meliputi 98% mata wang arus perdana; 2. Matriks inovasi meliputi pasaran Derivatif, susun atur Web3 dan sistem pendidikan; 3. Kelebihan teknikal adalah enjin yang sepadan dengan milisaat, dengan jumlah pemprosesan puncak sebanyak 1.4 juta transaksi sesaat; 4. Kemajuan pematuhan memegang lesen 15 negara dan menetapkan entiti yang mematuhi di Eropah dan Amerika Syarikat.
 Cara mengelakkan kerugian selepas peningkatan ETH
Apr 21, 2025 am 10:03 AM
Cara mengelakkan kerugian selepas peningkatan ETH
Apr 21, 2025 am 10:03 AM
Selepas peningkatan ETH, orang baru harus mengamalkan strategi berikut untuk mengelakkan kerugian: 1. Lakukan kerja rumah mereka dan memahami pengetahuan asas dan meningkatkan kandungan ETH; 2. Posisi kawalan, menguji perairan dalam jumlah yang kecil dan mempelbagaikan pelaburan; 3. Buat pelan dagangan, jelaskan matlamat dan tetapkan titik kehilangan berhenti; 4. Profil secara rasional dan elakkan membuat keputusan emosi; 5. Pilih platform perdagangan formal dan boleh dipercayai; 6. Pertimbangkan jangka panjang untuk mengelakkan kesan turun naik jangka pendek.
 Platform Pertukaran Cryptocurrency Top 10 senarai pertukaran mata wang digital terbesar di dunia
Apr 21, 2025 pm 07:15 PM
Platform Pertukaran Cryptocurrency Top 10 senarai pertukaran mata wang digital terbesar di dunia
Apr 21, 2025 pm 07:15 PM
Pertukaran memainkan peranan penting dalam pasaran cryptocurrency hari ini. Mereka bukan sahaja platform untuk pelabur untuk berdagang, tetapi juga sumber kecairan pasaran dan penemuan harga. Pertukaran mata wang maya terbesar di dunia di kalangan sepuluh teratas, dan pertukaran ini bukan sahaja jauh ke hadapan dalam jumlah dagangan, tetapi juga mempunyai kelebihan mereka sendiri dalam pengalaman pengguna, perkhidmatan keselamatan dan inovatif. Pertukaran yang atas senarai biasanya mempunyai pangkalan pengguna yang besar dan pengaruh pasaran yang luas, dan jumlah dagangan dan jenis aset mereka sering sukar dicapai oleh bursa lain.
 Mengapa kenaikan atau kejatuhan harga mata wang maya? Mengapa kenaikan atau kejatuhan harga mata wang maya?
Apr 21, 2025 am 08:57 AM
Mengapa kenaikan atau kejatuhan harga mata wang maya? Mengapa kenaikan atau kejatuhan harga mata wang maya?
Apr 21, 2025 am 08:57 AM
Faktor kenaikan harga mata wang maya termasuk: 1. Peningkatan permintaan pasaran, 2. Menurunkan bekalan, 3. Berita positif yang dirangsang, 4. Sentimen pasaran optimis, 5. Persekitaran makroekonomi; Faktor penurunan termasuk: 1. Mengurangkan permintaan pasaran, 2. Peningkatan bekalan, 3.
 Apakah sepuluh platform teratas dalam bulatan pertukaran mata wang?
Apr 21, 2025 pm 12:21 PM
Apakah sepuluh platform teratas dalam bulatan pertukaran mata wang?
Apr 21, 2025 pm 12:21 PM
Pertukaran teratas termasuk: 1. Binance, jumlah dagangan terbesar di dunia, menyokong 600 mata wang, dan yuran pengendalian tempat adalah 0.1%; 2. Okx, platform seimbang, menyokong 708 pasangan dagangan, dan yuran pengendalian kontrak kekal adalah 0.05%; 3. Gate.io, meliputi 2700 mata wang kecil, dan yuran pengendalian tempat ialah 0.1%-0.3%; 4. Coinbase, penanda aras pematuhan AS, yuran pengendalian tempat adalah 0.5%; 5. Kraken, keselamatan tertinggi, dan audit rizab tetap.
 Kedudukan pertukaran leverage dalam lingkaran mata wang Cadangan terkini sepuluh pertukaran leverage dalam lingkaran mata wang
Apr 21, 2025 pm 11:24 PM
Kedudukan pertukaran leverage dalam lingkaran mata wang Cadangan terkini sepuluh pertukaran leverage dalam lingkaran mata wang
Apr 21, 2025 pm 11:24 PM
Platform yang mempunyai prestasi cemerlang dalam perdagangan, keselamatan dan pengalaman pengguna yang dimanfaatkan pada tahun 2025 adalah: 1. Okx, sesuai untuk peniaga frekuensi tinggi, menyediakan sehingga 100 kali leverage; 2. Binance, sesuai untuk peniaga berbilang mata wang di seluruh dunia, memberikan 125 kali leverage tinggi; 3. Gate.io, sesuai untuk pemain derivatif profesional, menyediakan 100 kali leverage; 4. Bitget, sesuai untuk orang baru dan peniaga sosial, menyediakan sehingga 100 kali leverage; 5. Kraken, sesuai untuk pelabur mantap, menyediakan 5 kali leverage; 6. Bybit, sesuai untuk penjelajah altcoin, menyediakan 20 kali leverage; 7. Kucoin, sesuai untuk peniaga kos rendah, menyediakan 10 kali leverage; 8. Bitfinex, sesuai untuk bermain senior
 Apakah yang dimaksudkan dengan transaksi rantaian rantaian? Apakah urus niaga salib?
Apr 21, 2025 pm 11:39 PM
Apakah yang dimaksudkan dengan transaksi rantaian rantaian? Apakah urus niaga salib?
Apr 21, 2025 pm 11:39 PM
Pertukaran yang menyokong urus niaga rantaian: 1. Binance, 2. Uniswap, 3 Sushiswap, 4. Kewangan Curve, 5. Thorchain, 6. 1 inci Pertukaran, 7.
 Ramalan Harga Worldcoin (WLD) 2025-2031: Adakah WLD akan mencapai $ 4 menjelang 2031?
Apr 21, 2025 pm 02:42 PM
Ramalan Harga Worldcoin (WLD) 2025-2031: Adakah WLD akan mencapai $ 4 menjelang 2031?
Apr 21, 2025 pm 02:42 PM
Worldcoin (WLD) menonjol dalam pasaran cryptocurrency dengan mekanisme pengesahan biometrik dan perlindungan privasi yang unik, menarik perhatian banyak pelabur. WLD telah melakukan yang luar biasa di kalangan altcoin dengan teknologi inovatifnya, terutamanya dalam kombinasi dengan teknologi kecerdasan buatan terbuka. Tetapi bagaimanakah aset digital akan berkelakuan dalam beberapa tahun akan datang? Mari kita meramalkan harga masa depan WLD bersama -sama. Ramalan harga WLD 2025 dijangka mencapai pertumbuhan yang signifikan di WLD pada tahun 2025. Analisis pasaran menunjukkan bahawa harga WLD purata boleh mencapai $ 1.31, dengan maksimum $ 1.36. Walau bagaimanapun, dalam pasaran beruang, harga mungkin jatuh ke sekitar $ 0.55. Harapan pertumbuhan ini disebabkan terutamanya oleh WorldCoin2.
