
 Peranti teknologi
AI
Merealisasikan kerjasama manusia-mesin dalam pengeluaran dan pemasangan: Pemasangan pembangunan holografik WIMI dan teknologi kawalan berpandukan tangan berdasarkan antara muka otak-komputer
Peranti teknologi
AI
Merealisasikan kerjasama manusia-mesin dalam pengeluaran dan pemasangan: Pemasangan pembangunan holografik WIMI dan teknologi kawalan berpandukan tangan berdasarkan antara muka otak-komputer
Merealisasikan kerjasama manusia-mesin dalam pengeluaran dan pemasangan: Pemasangan pembangunan holografik WIMI dan teknologi kawalan berpandukan tangan berdasarkan antara muka otak-komputer

Dalam pembuatan moden, inovasi dan pembangunan teknologi yang berterusan telah membawa kemungkinan baharu kepada proses pengeluaran. Dalam beberapa tahun kebelakangan ini, robot kolaboratif (Cobots), sebagai mesin kompak, bukan sahaja boleh melaksanakan pelbagai tugas, tetapi juga bekerjasama dengan pengendali manusia untuk meningkatkan kecekapan pengeluaran dengan berkesan. Memandangkan ciri-ciri perusahaan kecil dan sederhana dengan kumpulan pengeluaran kecil, tugas yang banyak dan kompleks, WIMI telah membangunkan penyelesaian terobosan bagi "pemasangan berasaskan antara muka otak-komputer dan teknologi kawalan berpandukan tangan", yang membawa prospek baharu kepada bidang pengeluaran
Proses pengeluaran tradisional selalunya memerlukan pengendali untuk melaburkan banyak kekuatan dan tenaga fizikal, terutamanya dalam persekitaran dengan tugas yang kompleks dan kebolehulangan yang tinggi, yang boleh menyebabkan keletihan pengendali dan peningkatan kesilapan dengan mudah. Pengenalan robot kolaboratif telah membawa peluang baharu kepada perusahaan. Robot kolaboratif, dengan saiz kompak dan ciri boleh atur caranya, boleh melakukan pelbagai tugas dan boleh mengurangkan beban kerja pengendali dan meningkatkan kecekapan pengeluaran. Khususnya untuk perusahaan kecil dan sederhana, pengenalan teknologi ini akan menjadi kelebihan daya saing yang penting.
Untuk mencapai komunikasi dan kerjasama yang cekap antara manusia dan robot kolaboratif, isu utama ialah cara mereka bentuk tugas dan strategi interaksi yang sesuai. Untuk menyelesaikan masalah ini, WIMI mencadangkan strategi berdasarkan antara muka otak-komputer, yang merealisasikan kawalan perintah pengendali robot kolaboratif melalui teknologi antara muka otak-komputer.
Teknologi holografik WIMI merealisasikan pemasangan dan kawalan manual berdasarkan antara muka otak-komputer, memainkan peranan penting dalam teknologi antara muka otak-komputer. Antara muka otak-komputer (BCI) ialah teknologi yang mengesan aktiviti otak dan menukarkannya kepada arahan yang boleh difahami oleh komputer. Dalam teknologi ini, pengendali dapat menghantar arahan kepada robot kolaboratif melalui kaedah potensi bangkitan visual keadaan mantap (SSVEP). Pendekatan ini membolehkan pengendali menukar mod misi tanpa menggunakan tangan mereka. Selain itu, teknologi ini juga memperkenalkan kawalan panduan manual Dengan memasang penderia daya enam komponen pada pergelangan tangan robot kolaboratif, kawalan berpandukan tangan robot kolaboratif dicapai
.Dalam keseluruhan proses pengeluaran dan pemasangan, penukaran tugas dan penyegerakan fasa adalah penting. Pemasangan berasaskan antara muka komputer otak dan teknologi kawalan berpandukan tangan WIMI membahagikan proses kerjasama kepada peringkat bebas dan peringkat sokongan. Dalam fasa bebas, robot dan operator bekerja dalam senario yang sama untuk menyelesaikan pelbagai tugas yang berbeza. Sebaik sahaja pengendali memerlukan bantuan daripada robot, dia boleh beralih ke peringkat sokongan untuk mencapai operasi kerjasama manusia-mesin. Pensuisan ini dicapai dengan pengendali menghantar mesej arahan dalam antara muka antara muka otak-komputer, dengan itu memaklumkan robot tentang niat untuk menukar lebih awal
Selain itu, pemasangan dan teknologi kawalan berpandukan tangan antara muka komputer otak holografik WIMI membentangkan rangka kerja yang lengkap dalam aplikasi praktikal. Operator boleh berinteraksi dengan robot kolaboratif melalui antara muka. Dari segi aktiviti berkaitan antara muka otak-komputer, pengendali merealisasikan kawalan arahan robot dengan memerhati imej Arahan ini dirujuk kepada pengawal robot selepas dikumpulkan dan diproses oleh elektrod. Sebaliknya, dengan kawalan panduan manual, pengendali boleh membimbing robot melalui penderia pada pergelangan tangan robot. Aliran keseluruhan proses pemasangan bergantung pada subtugas robot pra-program dan arahan masa nyata yang dikeluarkan oleh pengendali
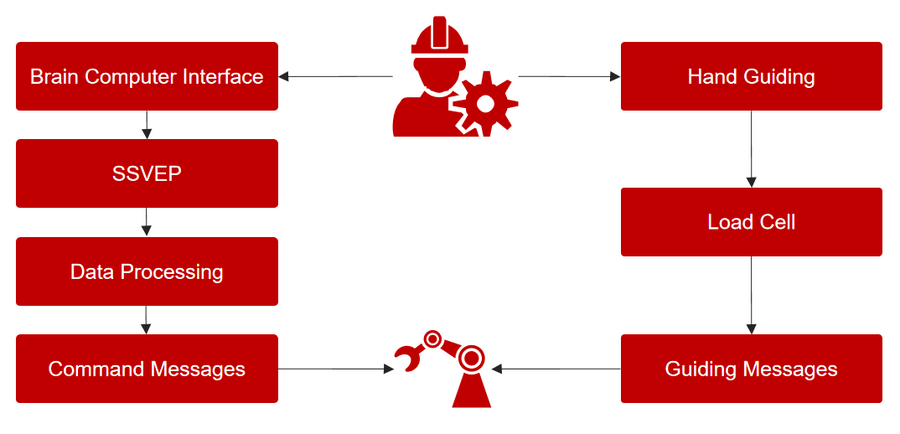
Keseluruhan proses daripada niat pengendali kepada tindakan sebenar robot kolaboratif. Proses ini melibatkan pelbagai pautan dan teknologi untuk memastikan bahawa niat pengendali boleh ditukar dengan tepat kepada tingkah laku robot, dengan itu mencapai operasi kerjasama manusia-mesin yang cekap.
Aplikasi teknologi antara muka otak-komputer (BCI): Teknologi antara muka otak-komputer adalah teras laluan teknikal. Dalam teknologi ini, aktiviti otak pengendali ditangkap dan ditukar kepada arahan yang boleh difahami oleh komputer, dengan itu mengawal robot kolaboratif. Dalam pemasangan berasaskan antara muka komputer otak dan teknologi kawalan berpandukan tangan WIMI, aplikasi teknologi antara muka otak-komputer mencapai niat bertukar untuk mod tugas yang berbeza melalui kaedah potensi bangkitan visual keadaan mantap (SSVEP)
Pengumpulan dan pemprosesan data: Langkah pertama dalam laluan teknikal ialah mengumpul dan memproses data mengenai aktiviti otak pengendali. Ini memerlukan meletakkan elektrod elektroensefalogram (EEG) pada kepala pengendali untuk menangkap isyarat elektrik yang dihasilkan oleh otak. Isyarat elektrik ini akan dihantar ke komputer untuk diproses bagi mengekstrak maklumat tentang niat pengendali
Penjanaan dan penghantaran arahan: Dengan menganalisis isyarat elektrik yang dihasilkan oleh otak pengendali, komputer boleh menjana arahan yang sepadan. Arahan ini mewakili niat pengendali untuk menukar mod misi. Arahan ini perlu dihantar kepada sistem kawalan robot kolaboratif untuk mengawal tingkah laku robot.
Aplikasi teknologi kawalan bimbingan manual: Dalam satu lagi cabang bidang teknologi ini, teknologi kawalan bimbingan manual digunakan untuk mencapai kawalan yang lebih tepat. Robot kolaboratif dilaksanakan menggunakan sensor daya enam komponen. Penderia boleh merasakan daya bimbingan tangan pengendali dan menghantar maklumat ini ke sistem kawalan robot
Kawalan dan pelaksanaan: Arahan yang dihasilkan oleh teknologi antara muka otak-komputer dan maklumat yang dihantar oleh teknologi kawalan panduan manual akhirnya dilaksanakan oleh sistem kawalan robot. Robot bertukar antara mod tugas yang berbeza mengikut niat pengendali, dengan itu beroperasi secara kolaboratif dalam peringkat yang berbeza.
Kandungan yang ditulis semula: Maklum balas dan penyegerakan: Langkah terakhir dalam laluan paparan teknikal melibatkan maklum balas dan penyegerakan. Sebaik sahaja robot melakukan tindakan yang sepadan, maklumat maklum balas boleh dihantar kepada operator untuk memastikan operator memahami tingkah laku dan status robot. Ini membantu pengendali melaraskan lagi komunikasi niat mereka, menghasilkan kerjasama manusia-mesin yang lebih baik
Setiap aspek teknologi holografik WIMI memerlukan definisi pembahagian kerja dan pelaksanaan untuk memastikan operasi kerjasama manusia-mesin yang cekap dan tepat. Kejayaan pembangunan teknologi inovatif ini telah membawa kemungkinan baharu kepada pembuatan moden, yang akan meningkatkan kecekapan pengeluaran, mengurangkan beban pengendali, dan memainkan peranan positif dalam perusahaan kecil dan sederhana
Jelas sekali, "pemasangan berasaskan antara muka otak-komputer dan teknologi kawalan berpandukan tangan" WIMI Hologram telah membawa peluang yang belum pernah berlaku sebelum ini kepada perusahaan kecil dan sederhana Dengan menggabungkan teknologi antara muka komputer otak dan teknologi kawalan berpandukan tangan, pengendali boleh Ini akan sangat meningkatkan kecekapan dan kualiti proses pengeluaran, mengurangkan beban pengendali, dan mengurangkan kadar ralat, menandakan peringkat baharu dalam pembuatan moden.
Atas ialah kandungan terperinci Merealisasikan kerjasama manusia-mesin dalam pengeluaran dan pemasangan: Pemasangan pembangunan holografik WIMI dan teknologi kawalan berpandukan tangan berdasarkan antara muka otak-komputer. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

AI Hentai Generator
Menjana ai hentai secara percuma.

Artikel Panas
Alat panas

Notepad++7.3.1
Editor kod yang mudah digunakan dan percuma

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

Hantar Studio 13.0.1
Persekitaran pembangunan bersepadu PHP yang berkuasa

Dreamweaver CS6
Alat pembangunan web visual

SublimeText3 versi Mac
Perisian penyuntingan kod peringkat Tuhan (SublimeText3)
Topik panas
 1384
1384
 52
52

 Antara muka otak-komputer bersinar menjadi realiti! Kementerian Perindustrian dan Teknologi Maklumat akan menumpukan usaha untuk memupuknya pada masa hadapan.
Jun 02, 2023 pm 11:34 PM
Antara muka otak-komputer bersinar menjadi realiti! Kementerian Perindustrian dan Teknologi Maklumat akan menumpukan usaha untuk memupuknya pada masa hadapan.
Jun 02, 2023 pm 11:34 PM
Antara muka otak-komputer bersinar menjadi realiti! Kementerian Perindustrian dan Teknologi Maklumat akan menumpukan usaha untuk memupuknya pada masa hadapan. Wartawan China Times (www.chinatimes.net.cn) Qi Meng dan Zhang Zhi melaporkan dari Shenzhen 14 tahun yang lalu, filem "Avatar" keluar, dan antara muka fantasi dan juga komputer otak-komputer ajaib berjalan melalui keseluruhan plot, dan kemudian antara muka otak-komputer menjadi sebahagian daripada banyak filem fiksyen sains yang penting dalam filem. Kini, antara muka otak-komputer telah menjadi kenyataan. Pada 29 Mei, di "Forum Inovasi dan Pembangunan Antara Muka Otak-Komputer", Zhao Zhiguo, ketua jurutera Kementerian Perindustrian dan Teknologi Maklumat, memperkenalkan bahawa dengan usaha bersama industri, negara saya telah membentuk rantaian industri penuh antara muka otak-komputer meliputi lapisan asas, lapisan teknikal dan lapisan aplikasi, dan Ia telah digunakan dalam bidang perubatan, pendidikan, industri, hiburan dan lain-lain. Beliau berkata, Kementerian Perindustrian dan Teknologi Maklumat akan menggunakan antara muka otak-komputer sebagai alat untuk memupuk masa depan
 Musk, antara muka otak-komputer, alat pertama
Jun 04, 2023 am 09:49 AM
Musk, antara muka otak-komputer, alat pertama
Jun 04, 2023 am 09:49 AM
Daripada "Silicon Valley Iron Man" kepada "Realistic Iron Man", Musk telah menjadi "Human Tony Stark", yang secara beransur-ansur menjadi kenyataan. Hanya beberapa hari yang lalu, syarikat antara muka komputer otak Musk, Neuralink mengumumkan kemajuan besar - ia telah menerima kelulusan daripada Pentadbiran Makanan dan Ubat-ubatan (FDA) A.S. dan akan melancarkan kajian klinikal manusia pertamanya, yang bermaksud peranti mereka akan diimplan dalam otak manusia. Dilaporkan bahawa mereka akan memberi tumpuan kepada dua aplikasi: memulihkan penglihatan manusia dan membantu orang yang tidak dapat menggerakkan otot mengawal peranti seperti telefon pintar. Pada November tahun lalu, Musk membuat kenyataan berani, mengatakan bahawa Neuralink masih lagi kira-kira 6 bulan lagi daripada percubaan manusia pertamanya. Tetapi kemudiannya, disebabkan risiko keselamatan yang tinggi, pelanggaran hak haiwan, dan disyaki pengangkutan haram patogen berbahaya...
 Popular dalam kalangan pelaburan! Adakah antara muka otak-komputer trek yang boleh dimenangi?
Jun 03, 2023 am 10:14 AM
Popular dalam kalangan pelaburan! Adakah antara muka otak-komputer trek yang boleh dimenangi?
Jun 03, 2023 am 10:14 AM
Pengarang/Editor Roti Bakar Di Bawah Langit Berbintang/Spinach's Starry Sky Typeset/Leeks Under the Starry Sky Brain-Computer Interface, istilah dengan rasa fiksyen sains, baru-baru ini menjadi salah satu perkataan hangat yang paling biasa di kalangan pelabur. tiada sektor boleh Suka, indeks boleh naik 8.2% dalam satu hari. Ringkasnya, antara muka otak-komputer mewujudkan hubungan langsung antara otak manusia dan peranti luaran, membolehkan otak kita mengadakan "dialog" dengan mesin. Laluan ini adalah untuk mengukur dan mengumpul aktiviti sistem saraf pusat, dan kemudian menterjemahkannya kepada isyarat yang boleh dikenali oleh dunia luar. Baru-baru ini, di "Forum Inovasi dan Pembangunan Antaramuka Otak-Komputer" Forum Zhongguancun, seorang pemimpin dari kementerian juga mencadangkan negara saya telah membentuk rantaian industri penuh antara muka otak-komputer yang meliputi lapisan asas, lapisan teknologi dan lapisan aplikasi. , dan ia telah digunakan dalam perubatan,
 Antara muka komputer otak kongsi Samsung XR yang dipatenkan menyediakan rangsangan maklum balas deria yang lengkap - bau, rasa, dsb.
Nov 27, 2023 pm 12:58 PM
Antara muka komputer otak kongsi Samsung XR yang dipatenkan menyediakan rangsangan maklum balas deria yang lengkap - bau, rasa, dsb.
Nov 27, 2023 pm 12:58 PM
(Nweon 27 November 2023) Menurut risikan terdahulu, Samsung telah merumuskan strategi metaverse yang lengkap dan bertujuan untuk membina ekosistem XR yang berpusatkan Samsung, dan secara aktif merekrut bakat. Menurut permohonan paten, syarikat itu sebenarnya telah mempertimbangkan antara muka otak-komputer muktamad. Pada masa lalu, penyelidikan antara muka otak-komputer adalah lebih biasa di kalangan Meta, Valve dan pemula lain. Sudah tentu, syarikat seperti Microsoft juga telah menerokainya. Pada masa kini, syarikat yang aktif menggunakan bidang XR mula meneroka antara muka komputer otak yang lebih maju. Dalam aplikasi paten bertajuk "Kaedah dan Peranti Penjanaan Maklumat," Samsung mencadangkan penggunaan antara muka otak-komputer kepada bidang rangsangan maklum balas deria XR Syarikat percaya bahawa dalam teknologi XR, pelbagai
 Perikatan Industri Antaramuka Otak-Komputer berjaya mengadakan seminar pertukaran akademik mengenai 'Antaramuka Otak-Komputer + Kemurungan'
Sep 20, 2023 pm 09:53 PM
Perikatan Industri Antaramuka Otak-Komputer berjaya mengadakan seminar pertukaran akademik mengenai 'Antaramuka Otak-Komputer + Kemurungan'
Sep 20, 2023 pm 09:53 PM
Untuk menyiasat sepenuhnya trend pembangunan teknologi, meneroka hala tuju pembangunan industri, dan membincangkan model kerjasama antara disiplin, pada 11 September 2023, Perikatan Industri Antara Muka Otak-Komputer telah menganjurkan fasa kedua "Bintang Cerah" dengan tema "Otak -Antaramuka Komputer + Kemurungan" Seminar pertukaran akademik acara. Seminar ini bertujuan untuk menggalakkan hubungan antara bekalan dan permintaan dan perkongsian pengetahuan, dan seterusnya menggalakkan pembangunan industri antara muka otak-komputer. Seminar itu dihoskan oleh Zhou Jie, Pengerusi Kumpulan Perikatan dan Aplikasi Industri. Seminar ini menarik perhatian meluas daripada ahli-ahli Perikatan Industri Antara Muka Otak-Komputer Hampir 300 orang menghadiri seminar tersebut, dan suasana perbincangan dalam talian itu meriah pada seminar itu, Sun Bomin, pengarah bersama Antara Muka Otak-Komputer Pusat Neuromodulasi Hospital Ruijin, bercakap tentang "Antaramuka Otak-Komputer dalam Kemurungan" Bertajuk "Aplikasi dalam Neuromodulasi Kemurungan", pengenalan terperinci kepada rawatan kemurungan dalam otak telah diberikan melalui contoh klinikal.
 140,000 untuk seekor monyet! Monyet diperlukan untuk antara muka otak-komputer Adakah baik untuk menggunakan haiwan eksperimen?
Jun 04, 2023 pm 01:16 PM
140,000 untuk seekor monyet! Monyet diperlukan untuk antara muka otak-komputer Adakah baik untuk menggunakan haiwan eksperimen?
Jun 04, 2023 pm 01:16 PM
Pengarang/Editor Stewed Under the Starry Sky/Spinach's Starry Sky Typesetting/Lobak di bawah Starry Sky Antara muka komputer otak telah menjadi popular baru-baru ini, rakan-rakan Starry Sky kami berbincang di pejabat, tetapi topik itu beralih kepada "monyet". . Neuralink, sebuah syarikat antara muka otak-komputer yang diasaskan oleh Encik Muskma pada tahun 2021, mencipta seekor monyet yang seolah-olah bermain pingpong "semuanya dengan pemikiran". Perkara utama ialah berapa banyak monyet yang digunakan untuk menjalankan eksperimen di sebalik monyet ajaib ini? Pada 2022, syarikat Encik Ma, yang terlibat dalam antara muka otak-komputer, telah dituduh Projek percubaan itu melibatkan sejumlah 23 monyet eksperimen, 15 daripadanya telah mati. Jadi jika antara muka otak-komputer dibangunkan secara besar-besaran, adakah nilai monyet akan meningkat dengan ketara? Hari ini kita akan bercakap tentang monyet yang digunakan dalam eksperimen, yang secara teknikal dipanggil haiwan eksperimen. perubatan manusia
 Berita besar tentang antara muka otak-komputer, Kementerian Perindustrian dan Teknologi Maklumat mencadangkan untuk mempercepatkan aplikasi perindustrian! Saham konsep yang paling menjanjikan mempunyai lebih daripada dua kali ganda, dan aktiviti perdagangan saham ini telah meningkat dengan ketara.
Oct 12, 2023 pm 02:29 PM
Berita besar tentang antara muka otak-komputer, Kementerian Perindustrian dan Teknologi Maklumat mencadangkan untuk mempercepatkan aplikasi perindustrian! Saham konsep yang paling menjanjikan mempunyai lebih daripada dua kali ganda, dan aktiviti perdagangan saham ini telah meningkat dengan ketara.
Oct 12, 2023 pm 02:29 PM
Data ialah harta karun. hiburan. Kementerian Perindustrian dan Teknologi Maklumat mencadangkan satu terobosan produk teknologi ikonik untuk antara muka otak-komputer Pada 11 Oktober, akaun WeChat rasmi Perikatan Industri Antara Muka Otak telah mengumumkan bahawa untuk melaksanakan "Notis mengenai. Menyusun dan Menjalankan Kerja Menyingkap dan Menerajui Tugasan Inovasi Perindustrian Masa Hadapan pada 2023" (selepas ini dirujuk sebagai "Pembukaan dan Peneraju"), kami akan mengukuhkan Tafsiran 2023 bagi kerja mendedahkan dan menerajui hala tuju antara muka otak-komputer. dalam tugasan inovasi perindustrian masa hadapan pada tahun ini Pejabat Piawaian Sains dan Teknologi Biro Ekonomi dan Teknologi Maklumat Perbandaran Beijing dan Pejabat Teknologi Tinggi Jabatan Sains dan Teknologi Kementerian Perindustrian dan Teknologi Maklumat menganjurkan satu publisiti dasar dan. mesyuarat pelaksanaan pada 10 Oktober untuk membantu syarikat antara muka otak-komputer memahami kerja pelancaran dan peneraju, merebut pembangunan
 Syarikat antara muka otak-komputer Musk, Neuralink akan menjalankan ujian manusia
Sep 20, 2023 pm 08:33 PM
Syarikat antara muka otak-komputer Musk, Neuralink akan menjalankan ujian manusia
Sep 20, 2023 pm 08:33 PM
Permulaan antara muka komputer otak Musk, Neuralink mengumumkan pada hari Selasa bahawa ia telah menerima kelulusan daripada lembaga semakan bebas untuk menjalankan percubaan manusia pertama menanam peranti implan otak ke dalam otak pesakit lumpuh Neuralink berkata kajian itu direka untuk menguji keselamatan dan keberkesanan antara muka komputer otak tanpa wayar yang boleh ditanam sepenuhnya Neuralink membolehkan pesakit lumpuh mengawal peranti luaran dengan otak mereka. Pada masa yang sama, syarikat secara rasmi membuka pengambilan pesakit percubaan klinikal Pesakit yang lumpuh akibat kecederaan saraf tunjang serviks atau amyotrophic lateral sclerosis (ALS) mungkin layak menyertai percubaan ini. Kementerian Perindustrian dan Teknologi Maklumat mengeluarkan notis pada 13 September untuk mengatur kerja penyiaran tugasan inovasi industri pada 2023. Tugas untuk mendedahkan senarai itu berorientasikan kepada metaverse,
