

Isu konsistensi gaya dalam teknologi pemindahan gaya imej

Isu konsistensi gaya dalam teknologi pemindahan gaya imej memerlukan contoh kod khusus
Dalam beberapa tahun kebelakangan ini, teknologi pemindahan gaya imej telah membuat penemuan besar dalam bidang penglihatan komputer. Dengan memindahkan gaya satu imej kepada imej yang lain, kami boleh mencipta kesan artistik yang menakjubkan. Walau bagaimanapun, ketekalan gaya merupakan isu penting untuk teknik pemindahan gaya imej.
Ketekalan gaya bermaksud bahawa apabila gaya satu imej dipindahkan ke imej lain, imej output hendaklah konsisten dari segi gaya dengan imej input. Ini bermakna ciri seperti warna, tekstur, bentuk, dsb. hendaklah serupa dengan imej input. Algoritma pemindahan gaya imej sedia ada sering gagal mengekalkan konsistensi gaya sepenuhnya, mengakibatkan perbezaan yang jelas antara imej output dan imej input dalam beberapa aspek.
Untuk menyelesaikan masalah ini, penyelidik telah mencadangkan beberapa kaedah untuk meningkatkan konsistensi gaya teknologi pemindahan gaya imej. Di bawah saya akan memperkenalkan beberapa kaedah yang biasa digunakan dan memberikan contoh kod yang sepadan.
- Fungsi Kehilangan Gaya
Fungsi kehilangan gaya ialah kaedah yang digunakan untuk mengukur persamaan gaya antara imej output dan imej input. Ia mengukur perbezaan gaya dengan mengira jarak antara perwakilan ciri imej output dan imej input pada lapisan ciri yang berbeza. Kaedah perwakilan ciri yang biasa digunakan termasuk ciri lapisan perantaraan dalam rangkaian saraf konvolusi, seperti output lapisan konvolusi dalam rangkaian VGG.
Contoh kod:
import torch
import torch.nn as nn
import torchvision.models as models
class StyleLoss(nn.Module):
def __init__(self):
super(StyleLoss, self).__init__()
self.model = models.vgg19(pretrained=True).features[:23]
self.layers = ['conv1_1', 'conv2_1', 'conv3_1', 'conv4_1']
def forward(self, input, target):
input_features = self.model(input)
target_features = self.model(target)
loss = 0
for layer in self.layers:
input_style = self.gram_matrix(input_features[layer])
target_style = self.gram_matrix(target_features[layer])
loss += torch.mean(torch.square(input_style - target_style))
return loss / len(self.layers)
def gram_matrix(self, input):
B, C, H, W = input.size()
features = input.view(B * C, H * W)
gram = torch.mm(features, features.t())
return gram / (B * C * H * W)- Rangkaian pemindahan gaya
Rangkaian pemindahan gaya ialah kaedah untuk mencapai konsistensi gaya dengan mentakrifkan pelbagai fungsi kehilangan sambil mengoptimumkan perbezaan antara imej input dan imej output. Selain fungsi kehilangan gaya, anda juga boleh menambah fungsi kehilangan kandungan dan jumlah fungsi kehilangan variasi. Fungsi kehilangan kandungan digunakan untuk mengekalkan persamaan dalam kandungan antara imej output dan imej input, dan fungsi kehilangan variasi jumlah digunakan untuk melicinkan imej output.
Contoh Kod:
class StyleTransferNet(nn.Module):
def __init__(self, style_weight, content_weight, tv_weight):
super(StyleTransferNet, self).__init__()
self.style_loss = StyleLoss()
self.content_loss = nn.MSELoss()
self.tv_loss = nn.L1Loss()
self.style_weight = style_weight
self.content_weight = content_weight
self.tv_weight = tv_weight
def forward(self, input, target):
style_loss = self.style_loss(input, target) * self.style_weight
content_loss = self.content_loss(input, target) * self.content_weight
tv_loss = self.tv_loss(input, target) * self.tv_weight
return style_loss + content_loss + tv_lossDengan menggunakan contoh kod di atas, kita boleh mengekalkan konsistensi gaya dengan lebih baik semasa proses pemindahan gaya imej. Apabila kita melaraskan parameter berat, kita boleh mendapatkan kesan pemindahan gaya yang berbeza.
Ringkasnya, ketekalan gaya ialah isu penting dalam teknologi pemindahan gaya imej. Dengan menggunakan kaedah seperti fungsi kehilangan gaya dan rangkaian pemindahan gaya, kami boleh meningkatkan ketekalan gaya teknik pemindahan gaya imej. Pada masa hadapan, dengan pembangunan pembelajaran mendalam, kita boleh menjangkakan kemunculan algoritma pemindahan gaya imej yang lebih cekap dan tepat.
Atas ialah kandungan terperinci Isu konsistensi gaya dalam teknologi pemindahan gaya imej. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

Video Face Swap
Tukar muka dalam mana-mana video dengan mudah menggunakan alat tukar muka AI percuma kami!

Artikel Panas
Alat panas

Notepad++7.3.1
Editor kod yang mudah digunakan dan percuma

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

Hantar Studio 13.0.1
Persekitaran pembangunan bersepadu PHP yang berkuasa

Dreamweaver CS6
Alat pembangunan web visual

SublimeText3 versi Mac
Perisian penyuntingan kod peringkat Tuhan (SublimeText3)
Topik panas



 Adakah anda benar-benar menguasai penukaran sistem koordinat? Isu berbilang sensor yang tidak dapat dipisahkan daripada pemanduan autonomi
Oct 12, 2023 am 11:21 AM
Adakah anda benar-benar menguasai penukaran sistem koordinat? Isu berbilang sensor yang tidak dapat dipisahkan daripada pemanduan autonomi
Oct 12, 2023 am 11:21 AM
Artikel perintis dan utama pertama terutamanya memperkenalkan beberapa sistem koordinat yang biasa digunakan dalam teknologi pemanduan autonomi, dan cara melengkapkan korelasi dan penukaran antara mereka, dan akhirnya membina model persekitaran bersatu. Fokus di sini adalah untuk memahami penukaran daripada kenderaan kepada badan tegar kamera (parameter luaran), penukaran kamera kepada imej (parameter dalaman) dan penukaran unit imej kepada piksel. Penukaran daripada 3D kepada 2D akan mempunyai herotan, terjemahan, dsb. Perkara utama: Sistem koordinat kenderaan dan sistem koordinat badan kamera perlu ditulis semula: sistem koordinat satah dan sistem koordinat piksel Kesukaran: herotan imej mesti dipertimbangkan Kedua-dua penyahherotan dan penambahan herotan diberi pampasan pada satah imej. 2. Pengenalan Terdapat empat sistem penglihatan secara keseluruhannya: sistem koordinat satah piksel (u, v), sistem koordinat imej (x, y), sistem koordinat kamera () dan sistem koordinat dunia (). Terdapat hubungan antara setiap sistem koordinat,
 Kertas Stable Diffusion 3 akhirnya telah dikeluarkan, dan butiran seni bina didedahkan Adakah ia akan membantu untuk menghasilkan semula Sora?
Mar 06, 2024 pm 05:34 PM
Kertas Stable Diffusion 3 akhirnya telah dikeluarkan, dan butiran seni bina didedahkan Adakah ia akan membantu untuk menghasilkan semula Sora?
Mar 06, 2024 pm 05:34 PM
Kertas StableDiffusion3 akhirnya di sini! Model ini dikeluarkan dua minggu lalu dan menggunakan seni bina DiT (DiffusionTransformer) yang sama seperti Sora. Ia menimbulkan kekecohan apabila ia dikeluarkan. Berbanding dengan versi sebelumnya, kualiti imej yang dijana oleh StableDiffusion3 telah dipertingkatkan dengan ketara Ia kini menyokong gesaan berbilang tema, dan kesan penulisan teks juga telah dipertingkatkan, dan aksara bercelaru tidak lagi muncul. StabilityAI menegaskan bahawa StableDiffusion3 ialah satu siri model dengan saiz parameter antara 800M hingga 8B. Julat parameter ini bermakna model boleh dijalankan terus pada banyak peranti mudah alih, dengan ketara mengurangkan penggunaan AI
 Artikel ini sudah cukup untuk anda membaca tentang pemanduan autonomi dan ramalan trajektori!
Feb 28, 2024 pm 07:20 PM
Artikel ini sudah cukup untuk anda membaca tentang pemanduan autonomi dan ramalan trajektori!
Feb 28, 2024 pm 07:20 PM
Ramalan trajektori memainkan peranan penting dalam pemanduan autonomi Ramalan trajektori pemanduan autonomi merujuk kepada meramalkan trajektori pemanduan masa hadapan kenderaan dengan menganalisis pelbagai data semasa proses pemanduan kenderaan. Sebagai modul teras pemanduan autonomi, kualiti ramalan trajektori adalah penting untuk kawalan perancangan hiliran. Tugas ramalan trajektori mempunyai timbunan teknologi yang kaya dan memerlukan kebiasaan dengan persepsi dinamik/statik pemanduan autonomi, peta ketepatan tinggi, garisan lorong, kemahiran seni bina rangkaian saraf (CNN&GNN&Transformer), dll. Sangat sukar untuk bermula! Ramai peminat berharap untuk memulakan ramalan trajektori secepat mungkin dan mengelakkan perangkap Hari ini saya akan mengambil kira beberapa masalah biasa dan kaedah pembelajaran pengenalan untuk ramalan trajektori! Pengetahuan berkaitan pengenalan 1. Adakah kertas pratonton teratur? A: Tengok survey dulu, hlm
 DualBEV: mengatasi BEVFormer dan BEVDet4D dengan ketara, buka buku!
Mar 21, 2024 pm 05:21 PM
DualBEV: mengatasi BEVFormer dan BEVDet4D dengan ketara, buka buku!
Mar 21, 2024 pm 05:21 PM
Kertas kerja ini meneroka masalah mengesan objek dengan tepat dari sudut pandangan yang berbeza (seperti perspektif dan pandangan mata burung) dalam pemanduan autonomi, terutamanya cara mengubah ciri dari perspektif (PV) kepada ruang pandangan mata burung (BEV) dengan berkesan dilaksanakan melalui modul Transformasi Visual (VT). Kaedah sedia ada secara amnya dibahagikan kepada dua strategi: penukaran 2D kepada 3D dan 3D kepada 2D. Kaedah 2D-ke-3D meningkatkan ciri 2D yang padat dengan meramalkan kebarangkalian kedalaman, tetapi ketidakpastian yang wujud dalam ramalan kedalaman, terutamanya di kawasan yang jauh, mungkin menimbulkan ketidaktepatan. Manakala kaedah 3D ke 2D biasanya menggunakan pertanyaan 3D untuk mencuba ciri 2D dan mempelajari berat perhatian bagi kesesuaian antara ciri 3D dan 2D melalui Transformer, yang meningkatkan masa pengiraan dan penggunaan.
 Model dunia penjanaan video adegan pemanduan berbilang paparan autonomi |
Oct 23, 2023 am 11:13 AM
Model dunia penjanaan video adegan pemanduan berbilang paparan autonomi |
Oct 23, 2023 am 11:13 AM
Beberapa pemikiran peribadi pengarang Dalam bidang pemanduan autonomi, dengan pembangunan sub-tugas/penyelesaian hujung-ke-hujung berasaskan BEV, data latihan berbilang paparan berkualiti tinggi dan pembinaan adegan simulasi yang sepadan telah menjadi semakin penting. Sebagai tindak balas kepada titik kesakitan tugas semasa, "kualiti tinggi" boleh dipecahkan kepada tiga aspek: senario ekor panjang dalam dimensi berbeza: seperti kenderaan jarak dekat dalam data halangan dan sudut arah tepat semasa pemotongan kereta, dan data garis lorong. . Ini selalunya bergantung pada sejumlah besar pengumpulan data dan strategi perlombongan data yang kompleks, yang memerlukan kos yang tinggi. Nilai sebenar 3D - imej sangat konsisten: Pemerolehan data BEV semasa sering dipengaruhi oleh ralat dalam pemasangan/penentukuran sensor, peta berketepatan tinggi dan algoritma pembinaan semula itu sendiri. ini membawa saya kepada
 GSLAM |. Seni bina dan penanda aras umum SLAM
Oct 20, 2023 am 11:37 AM
GSLAM |. Seni bina dan penanda aras umum SLAM
Oct 20, 2023 am 11:37 AM
Tiba-tiba menemui kertas 19 tahun GSLAM: Rangka Kerja SLAM Umum dan kod sumber terbuka Penanda Aras: https://github.com/zdzhaoyong/GSLAM Pergi terus ke teks penuh dan rasai kualiti karya ini~1 Teknologi SLAM Abstrak telah mencapai banyak kejayaan baru-baru ini dan menarik ramai yang menarik perhatian syarikat berteknologi tinggi. Walau bagaimanapun, cara untuk antara muka dengan algoritma sedia ada atau yang baru muncul untuk melaksanakan penandaarasan dengan cekap pada kelajuan, kekukuhan dan mudah alih masih menjadi persoalan. Dalam kertas kerja ini, satu platform SLAM baharu yang dipanggil GSLAM dicadangkan, yang bukan sahaja menyediakan keupayaan penilaian tetapi juga menyediakan penyelidik dengan cara yang berguna untuk membangunkan sistem SLAM mereka sendiri dengan pantas.
 'Minecraft' bertukar menjadi bandar AI, dan penduduk NPC memainkan peranan seperti orang sebenar
Jan 02, 2024 pm 06:25 PM
'Minecraft' bertukar menjadi bandar AI, dan penduduk NPC memainkan peranan seperti orang sebenar
Jan 02, 2024 pm 06:25 PM
Sila ambil perhatian bahawa lelaki persegi ini berkerut dahi, memikirkan identiti "tetamu tidak diundang" di hadapannya. Ternyata dia berada dalam situasi berbahaya, dan apabila dia menyedari perkara ini, dia segera memulakan pencarian mental untuk mencari strategi untuk menyelesaikan masalah itu. Akhirnya, dia memutuskan untuk melarikan diri dari tempat kejadian dan kemudian mendapatkan bantuan secepat mungkin dan mengambil tindakan segera. Pada masa yang sama, orang di seberang sana memikirkan perkara yang sama seperti dia... Terdapat adegan sedemikian dalam "Minecraft" di mana semua watak dikawal oleh kecerdasan buatan. Setiap daripada mereka mempunyai latar identiti yang unik Contohnya, gadis yang disebutkan sebelum ini adalah seorang kurier berusia 17 tahun tetapi bijak dan berani. Mereka mempunyai daya ingatan dan pemikiran serta hidup seperti manusia di bandar kecil yang terletak di Minecraft ini. Apa yang mendorong mereka adalah sesuatu yang baru,
 Semakan! Gabungan model mendalam (LLM/model asas/pembelajaran bersekutu/penalaan halus, dsb.)
Apr 18, 2024 pm 09:43 PM
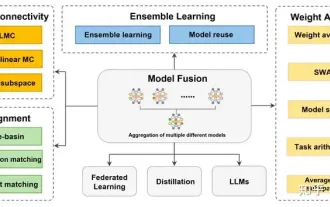
Semakan! Gabungan model mendalam (LLM/model asas/pembelajaran bersekutu/penalaan halus, dsb.)
Apr 18, 2024 pm 09:43 PM
Pada 23 September, kertas kerja "DeepModelFusion:ASurvey" diterbitkan oleh Universiti Teknologi Pertahanan Nasional, JD.com dan Institut Teknologi Beijing. Gabungan/penggabungan model dalam ialah teknologi baru muncul yang menggabungkan parameter atau ramalan berbilang model pembelajaran mendalam ke dalam satu model. Ia menggabungkan keupayaan model yang berbeza untuk mengimbangi bias dan ralat model individu untuk prestasi yang lebih baik. Gabungan model mendalam pada model pembelajaran mendalam berskala besar (seperti LLM dan model asas) menghadapi beberapa cabaran, termasuk kos pengiraan yang tinggi, ruang parameter berdimensi tinggi, gangguan antara model heterogen yang berbeza, dsb. Artikel ini membahagikan kaedah gabungan model dalam sedia ada kepada empat kategori: (1) "Sambungan corak", yang menghubungkan penyelesaian dalam ruang berat melalui laluan pengurangan kerugian untuk mendapatkan gabungan model awal yang lebih baik.
