
 Peranti teknologi
AI
Set Data Persepsi Amodal Sintetik AmodalSynthDrive: Penyelesaian Inovatif untuk Pemanduan Autonomi
Peranti teknologi
AI
Set Data Persepsi Amodal Sintetik AmodalSynthDrive: Penyelesaian Inovatif untuk Pemanduan Autonomi
Set Data Persepsi Amodal Sintetik AmodalSynthDrive: Penyelesaian Inovatif untuk Pemanduan Autonomi

- paper Link: https://arxiv.org/pdf/2309.06547.pdf
- dataset Link: http: //amodalsyndrive.cs.uni-freiburg.de
abstract
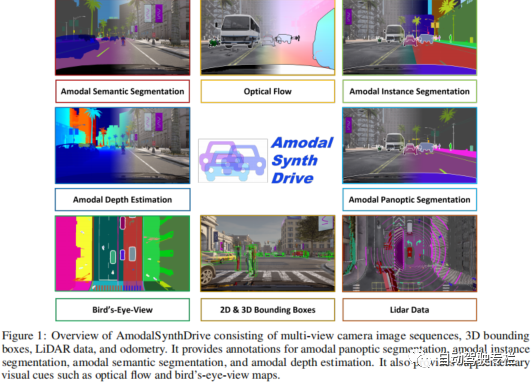
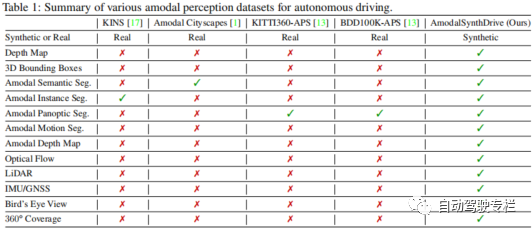
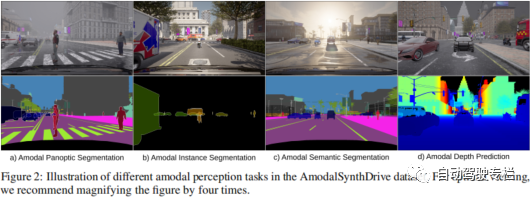
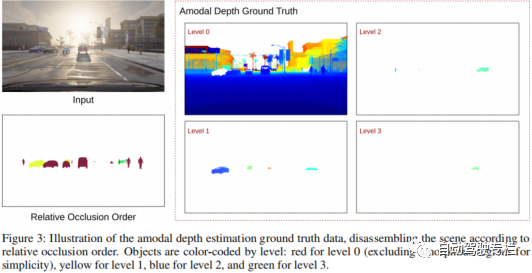
Makalah ini memperkenalkan AmodalSynthDrive: set data persepsi amodal sintetik untuk pemanduan autonomi. Tidak seperti manusia, yang boleh menganggarkan keseluruhan objek dengan mudah walaupun dengan kehadiran oklusi separa, algoritma penglihatan komputer moden masih mendapati aspek ini amat mencabar. Memanfaatkan persepsi amodal ini untuk pemanduan autonomi masih belum diterokai kerana kekurangan set data yang sesuai. Penjanaan set data ini terutamanya dipengaruhi oleh kos anotasi yang mahal dan keperluan untuk mengurangkan gangguan yang disebabkan oleh subjektiviti anotasi dalam pelabelan kawasan tersumbat dengan tepat. Untuk menangani batasan ini, makalah ini memperkenalkan AmodalSynthDrive, set data persepsi amodal berbilang tugas sintetik. Set data menyediakan imej kamera berbilang paparan, kotak sempadan 3D, data lidar dan odometri untuk 150 urutan pemanduan, termasuk lebih daripada anotasi objek 1M dalam pelbagai keadaan trafik, cuaca dan pencahayaan. AmodalSynthDrive menyokong pelbagai tugas pemahaman adegan amodal, termasuk pengenalan anggaran kedalaman amodal untuk pemahaman spatial yang dipertingkatkan. Artikel ini menilai beberapa garis dasar untuk setiap tugas untuk menggambarkan cabaran dan menyediakan pelayan penanda aras awam. Sumbangan Utama Kertas kerja ini mencadangkan penanda aras untuk tugas persepsi bukan modal, termasuk segmentasi semantik bukan modal, segmentasi contoh bukan modal dan segmentasi panorama bukan modal
3) Tujuan tugas anggaran kedalaman bukan modal baharu Dalam mempromosikan dipertingkatkan. pemahaman spatial. Kertas kerja ini menunjukkan kebolehlaksanaan tugas baharu ini melalui beberapa garis dasar.Gambar dan meja kertas
Ringkasan
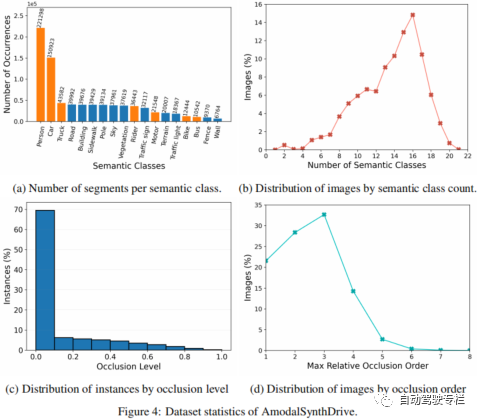
Persepsi ialah tugas utama untuk kenderaan autonomi, tetapi kaedah semasa masih kurang pemahaman amodal yang diperlukan untuk mentafsir adegan lalu lintas yang kompleks. Oleh itu, kertas kerja ini mencadangkan AmodalSynthDrive, set data persepsi sintetik multimodal untuk pemanduan autonomi. Dengan imej sintetik dan awan titik lidar, kami menyediakan set data komprehensif yang merangkumi data beranotasi ground-truth untuk tugas persepsi amodal asas dan memperkenalkan tugas baharu untuk meningkatkan pemahaman spatial yang dipanggil anggaran kedalaman Amodal. Kertas kerja ini menyediakan lebih 60,000 set imej individu, setiap satunya mengandungi pembahagian contoh amodal, pembahagian semantik amodal, pembahagian panorama amodal, aliran optik, kotak sempadan 2D dan 3D, kedalaman amodal dan data berkaitan Rajah mata. Melalui AmodalSynthDrive, kertas kerja ini menyediakan pelbagai garis dasar dan percaya bahawa kerja ini akan membuka jalan kepada jenis penyelidikan baharu mengenai pemahaman adegan amodal dalam persekitaran bandar dinamik

Pautan asal: https://mp.weixin .qq.com /s/7cXqFbMoljcs6dQOLU3SAQ
Atas ialah kandungan terperinci Set Data Persepsi Amodal Sintetik AmodalSynthDrive: Penyelesaian Inovatif untuk Pemanduan Autonomi. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

AI Hentai Generator
Menjana ai hentai secara percuma.

Artikel Panas
Alat panas

Notepad++7.3.1
Editor kod yang mudah digunakan dan percuma

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

Hantar Studio 13.0.1
Persekitaran pembangunan bersepadu PHP yang berkuasa

Dreamweaver CS6
Alat pembangunan web visual

SublimeText3 versi Mac
Perisian penyuntingan kod peringkat Tuhan (SublimeText3)
Topik panas
 1384
1384
 52
52

 Desktop Jauh tidak boleh mengesahkan identiti komputer jauh
Feb 29, 2024 pm 12:30 PM
Desktop Jauh tidak boleh mengesahkan identiti komputer jauh
Feb 29, 2024 pm 12:30 PM
Perkhidmatan Desktop Jauh Windows membolehkan pengguna mengakses komputer dari jauh, yang sangat mudah untuk orang yang perlu bekerja dari jauh. Walau bagaimanapun, masalah boleh dihadapi apabila pengguna tidak dapat menyambung ke komputer jauh atau apabila Desktop Jauh tidak dapat mengesahkan identiti komputer. Ini mungkin disebabkan oleh isu sambungan rangkaian atau kegagalan pengesahan sijil. Dalam kes ini, pengguna mungkin perlu menyemak sambungan rangkaian, memastikan komputer jauh berada dalam talian dan cuba menyambung semula. Selain itu, memastikan bahawa pilihan pengesahan komputer jauh dikonfigurasikan dengan betul adalah kunci untuk menyelesaikan isu tersebut. Masalah sedemikian dengan Perkhidmatan Desktop Jauh Windows biasanya boleh diselesaikan dengan menyemak dan melaraskan tetapan dengan teliti. Desktop Jauh tidak boleh mengesahkan identiti komputer jauh kerana perbezaan masa atau tarikh. Sila pastikan pengiraan anda
 Kedudukan Sains Komputer Kebangsaan 2024 CSRankings Dikeluarkan! CMU mendominasi senarai, MIT terkeluar daripada 5 teratas
Mar 25, 2024 pm 06:01 PM
Kedudukan Sains Komputer Kebangsaan 2024 CSRankings Dikeluarkan! CMU mendominasi senarai, MIT terkeluar daripada 5 teratas
Mar 25, 2024 pm 06:01 PM
Kedudukan Utama Sains Komputer Kebangsaan 2024CSRankings baru sahaja dikeluarkan! Tahun ini, dalam ranking universiti CS terbaik di Amerika Syarikat, Carnegie Mellon University (CMU) berada di antara yang terbaik di negara ini dan dalam bidang CS, manakala University of Illinois di Urbana-Champaign (UIUC) telah menduduki tempat kedua selama enam tahun berturut-turut. Georgia Tech menduduki tempat ketiga. Kemudian, Universiti Stanford, Universiti California di San Diego, Universiti Michigan, dan Universiti Washington terikat di tempat keempat di dunia. Perlu diingat bahawa kedudukan MIT jatuh dan jatuh daripada lima teratas. CSRankings ialah projek ranking universiti global dalam bidang sains komputer yang dimulakan oleh Profesor Emery Berger dari Pusat Pengajian Sains Komputer dan Maklumat di Universiti Massachusetts Amherst. Kedudukan adalah berdasarkan objektif
 Apakah e dalam komputer?
Aug 31, 2023 am 09:36 AM
Apakah e dalam komputer?
Aug 31, 2023 am 09:36 AM
"e" komputer ialah simbol notasi saintifik Huruf "e" digunakan sebagai pemisah eksponen dalam notasi saintifik, yang bermaksud "didarabkan kepada kuasa 10". 10^E, di mana M ialah nombor antara 1 dan 10 dan E mewakili eksponen.
 Betulkan: Kod ralat Microsoft Teams 80090016 Modul Platform Dipercayai komputer anda telah gagal
Apr 19, 2023 pm 09:28 PM
Betulkan: Kod ralat Microsoft Teams 80090016 Modul Platform Dipercayai komputer anda telah gagal
Apr 19, 2023 pm 09:28 PM
<p>MSTeams ialah platform yang dipercayai untuk berkomunikasi, bersembang atau menelefon dengan rakan sepasukan dan rakan sekerja. Kod ralat 80090016 pada MSTeams dan mesej <strong>Modul Platform Dipercayai komputer anda telah gagal</strong> Apl tidak akan membenarkan anda log masuk sehingga kod ralat diselesaikan. Jika anda menemui mesej sedemikian semasa membuka MS Teams atau mana-mana aplikasi Microsoft lain, maka artikel ini boleh membimbing anda untuk menyelesaikan isu tersebut. </p><h2&
 Apakah maksud komputer cu?
Aug 15, 2023 am 09:58 AM
Apakah maksud komputer cu?
Aug 15, 2023 am 09:58 AM
Maksud cu dalam komputer bergantung kepada konteks: 1. Unit Kawalan, dalam pemproses pusat komputer, CU ialah komponen yang bertanggungjawab untuk menyelaras dan mengawal keseluruhan proses pengkomputeran 2. Unit Pengiraan, dalam pemproses grafik atau lain-lain pemproses dipercepatkan, CU ialah unit asas untuk memproses tugas pengkomputeran selari.
 Tidak dapat membuka objek Dasar Kumpulan pada komputer ini
Feb 07, 2024 pm 02:00 PM
Tidak dapat membuka objek Dasar Kumpulan pada komputer ini
Feb 07, 2024 pm 02:00 PM
Kadangkala, sistem pengendalian mungkin tidak berfungsi apabila menggunakan komputer. Masalah yang saya hadapi hari ini ialah apabila mengakses gpedit.msc, sistem menggesa objek Dasar Kumpulan tidak boleh dibuka kerana kebenaran yang betul mungkin tiada. Objek Dasar Kumpulan pada komputer ini tidak dapat dibuka Penyelesaian: 1. Apabila mengakses gpedit.msc, sistem menggesa bahawa objek Dasar Kumpulan pada komputer ini tidak boleh dibuka kerana kekurangan kebenaran. Butiran: Sistem tidak dapat mengesan laluan yang ditentukan. 2. Selepas pengguna mengklik butang tutup, tetingkap ralat berikut muncul. 3. Semak rekod log dengan segera dan gabungkan maklumat yang direkodkan untuk mendapati bahawa masalahnya terletak pada fail C:\Windows\System32\GroupPolicy\Machine\registry.pol
 Skrip Python untuk log keluar dari komputer
Sep 05, 2023 am 08:37 AM
Skrip Python untuk log keluar dari komputer
Sep 05, 2023 am 08:37 AM
Dalam era digital hari ini, automasi memainkan peranan penting dalam memperkemas dan memudahkan pelbagai tugas. Salah satu tugas ini adalah untuk log keluar komputer, yang biasanya dilakukan secara manual dengan memilih pilihan log keluar daripada antara muka pengguna sistem pengendalian. Tetapi bagaimana jika kita boleh mengautomasikan proses ini menggunakan skrip Python? Dalam catatan blog ini, kami akan meneroka cara membuat skrip Python yang boleh log keluar dari komputer anda dengan hanya beberapa baris kod. Dalam artikel ini, kami akan melalui proses langkah demi langkah untuk mencipta skrip Python untuk log keluar dari komputer anda. Kami akan merangkumi prasyarat yang diperlukan, membincangkan cara yang berbeza untuk log keluar secara pemrograman dan menyediakan panduan langkah demi langkah untuk menulis skrip. Selain itu, kami akan menangani pertimbangan khusus platform dan menyerlahkan amalan terbaik
 Untuk menyediakan tanda aras dan sistem penilaian menjawab soalan saintifik dan kompleks baharu untuk model besar, UNSW, Argonne, University of Chicago dan institusi lain bersama-sama melancarkan rangka kerja SciQAG
Jul 25, 2024 am 06:42 AM
Untuk menyediakan tanda aras dan sistem penilaian menjawab soalan saintifik dan kompleks baharu untuk model besar, UNSW, Argonne, University of Chicago dan institusi lain bersama-sama melancarkan rangka kerja SciQAG
Jul 25, 2024 am 06:42 AM
Editor |ScienceAI Question Answering (QA) set data memainkan peranan penting dalam mempromosikan penyelidikan pemprosesan bahasa semula jadi (NLP). Set data QA berkualiti tinggi bukan sahaja boleh digunakan untuk memperhalusi model, tetapi juga menilai dengan berkesan keupayaan model bahasa besar (LLM), terutamanya keupayaan untuk memahami dan menaakul tentang pengetahuan saintifik. Walaupun pada masa ini terdapat banyak set data QA saintifik yang meliputi bidang perubatan, kimia, biologi dan bidang lain, set data ini masih mempunyai beberapa kekurangan. Pertama, borang data adalah agak mudah, kebanyakannya adalah soalan aneka pilihan. Ia mudah dinilai, tetapi mengehadkan julat pemilihan jawapan model dan tidak dapat menguji sepenuhnya keupayaan model untuk menjawab soalan saintifik. Sebaliknya, Soal Jawab terbuka
