

Pembelajaran Mesin |. Tutorial Ringkas PyTorch Bahagian 2

Menyusul artikel sebelum ini"Tutorial Ringkas PyTorch Bahagian 1", teruskan mempelajari perceptron berbilang lapisan, rangkaian neural konvolusi dan LSTMNet.
1. Multi-layer perceptron
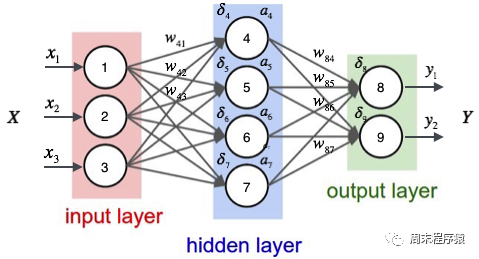
Multi-layer perceptron ialah rangkaian neural yang ringkas dan asas penting untuk pembelajaran mendalam. Ia mengatasi batasan model linear dengan menambahkan satu atau lebih lapisan tersembunyi pada rangkaian. Gambar rajah khusus adalah seperti berikut:
import numpy as npimport torchfrom torch.autograd import Variablefrom torch import optimfrom data_util import load_mnistdef build_model(input_dim, output_dim):return torch.nn.Sequential(torch.nn.Linear(input_dim, 512, bias=False),torch.nn.ReLU(),torch.nn.Dropout(0.2),torch.nn.Linear(512, 512, bias=False),torch.nn.ReLU(),torch.nn.Dropout(0.2),torch.nn.Linear(512, output_dim, bias=False),)def train(model, loss, optimizer, x_val, y_val):model.train()optimizer.zero_grad()fx = model.forward(x_val)output = loss.forward(fx, y_val)output.backward()optimizer.step()return output.item()def predict(model, x_val):model.eval()output = model.forward(x_val)return output.data.numpy().argmax(axis=1)def main():torch.manual_seed(42)trX, teX, trY, teY = load_mnist(notallow=False)trX = torch.from_numpy(trX).float()teX = torch.from_numpy(teX).float()trY = torch.tensor(trY)n_examples, n_features = trX.size()n_classes = 10model = build_model(n_features, n_classes)loss = torch.nn.CrossEntropyLoss(reductinotallow='mean')optimizer = optim.Adam(model.parameters())batch_size = 100for i in range(100):cost = 0.num_batches = n_examples // batch_sizefor k in range(num_batches):start, end = k * batch_size, (k + 1) * batch_sizecost += train(model, loss, optimizer,trX[start:end], trY[start:end])predY = predict(model, teX)print("Epoch %d, cost = %f, acc = %.2f%%"% (i + 1, cost / num_batches, 100. * np.mean(predY == teY)))if __name__ == "__main__":main()(1) Kod di atas adalah serupa dengan kod rangkaian neural satu lapisan Perbezaannya ialah build_model membina model rangkaian saraf yang mengandungi tiga lapisan linear dan dua pengaktifan ReLU fungsi:
- Tambahkan lapisan linear pertama pada model Bilangan ciri input lapisan ini adalah input_dim dan bilangan ciri output ialah 512
- Kemudian tambahkan fungsi pengaktifan ReLU dan lapisan Dropout untuk meningkatkan keupayaan bukan linear; daripada model dan elakkan overfitting; Lapisan tercicir;
- Tambah lapisan linear ketiga pada model A lapisan linear, bilangan ciri input lapisan ini ialah 512, dan bilangan ciri output ialah output_dim, iaitu bilangan kategori keluaran model; (2) Apakah fungsi pengaktifan ReLU? Fungsi pengaktifan ReLU (Rectified Linear Unit) ialah fungsi pengaktifan yang biasa digunakan dalam pembelajaran mendalam dan rangkaian saraf Ungkapan matematik fungsi ReLU ialah: f(x) = max(0, x), dengan x ialah nilai input. Ciri fungsi ReLU ialah apabila nilai input kurang daripada atau sama dengan 0, output adalah 0 apabila nilai input lebih besar daripada 0, output adalah sama dengan nilai input. Ringkasnya, fungsi ReLU menekan bahagian negatif kepada 0 dan membiarkan bahagian positif tidak berubah. Peranan fungsi pengaktifan ReLU dalam rangkaian saraf adalah untuk memperkenalkan faktor tak linear supaya rangkaian saraf dapat menyesuaikan hubungan tak linear yang kompleks Pada masa yang sama, fungsi ReLU mempunyai kelajuan pengiraan yang cepat dan kelajuan penumpuan yang cepat berbanding dengan fungsi pengaktifan lain (seperti. sebagai Sigmoid atau Tanh) dan kelebihan lain; Lapisan tercicir ialah teknik yang digunakan dalam rangkaian saraf untuk mengelakkan overfitting. Semasa proses latihan, lapisan Dropout secara rawak akan menetapkan output beberapa neuron kepada 0, iaitu, "membuang" neuron ini adalah untuk mengurangkan saling bergantung antara neuron dan dengan itu meningkatkan keupayaan generalisasi rangkaian.
- (4)print("Epoch %d, cost = %f, acc = %.2f%%" % (i + 1, cost / num_batches, 100. * np.mean(predY == teY))) Akhirnya , pusingan latihan semasa, nilai kerugian dan acc dicetak Output kod di atas adalah seperti berikut:
...Epoch 91, cost = 0.011129, acc = 98.45%Epoch 92, cost = 0.007644, acc = 98.58%Epoch 93, cost = 0.011872, acc = 98.61%Epoch 94, cost = 0.010658, acc = 98.58%Epoch 95, cost = 0.007274, acc = 98.54%Epoch 96, cost = 0.008183, acc = 98.43%Epoch 97, cost = 0.009999, acc = 98.33%Epoch 98, cost = 0.011613, acc = 98.36%Epoch 99, cost = 0.007391, acc = 98.51%Epoch 100, cost = 0.011122, acc = 98.59%
Salin selepas log masuk Dapat dilihat bahawa klasifikasi data yang sama mempunyai ketepatan yang lebih tinggi daripada rangkaian neural satu lapisan (98.59% > 97.68. %).
2. Rangkaian Neural Convolutional
Convolutional Neural Network (CNN) ialah algoritma pembelajaran mendalam. Apabila matriks adalah input, CNN boleh membezakan antara bahagian penting dan tidak penting (menetapkan pemberat). Berbanding dengan tugas pengelasan lain, CNN tidak memerlukan prapemprosesan data yang tinggi Selagi ia terlatih sepenuhnya, ia boleh mempelajari ciri-ciri matriks. Rajah berikut menunjukkan proses:
import numpy as npimport torchfrom torch.autograd import Variablefrom torch import optimfrom data_util import load_mnistclass ConvNet(torch.nn.Module):def __init__(self, output_dim):super(ConvNet, self).__init__()self.conv = torch.nn.Sequential()self.conv.add_module("conv_1", torch.nn.Conv2d(1, 10, kernel_size=5))self.conv.add_module("maxpool_1", torch.nn.MaxPool2d(kernel_size=2))self.conv.add_module("relu_1", torch.nn.ReLU())self.conv.add_module("conv_2", torch.nn.Conv2d(10, 20, kernel_size=5))self.conv.add_module("dropout_2", torch.nn.Dropout())self.conv.add_module("maxpool_2", torch.nn.MaxPool2d(kernel_size=2))self.conv.add_module("relu_2", torch.nn.ReLU())self.fc = torch.nn.Sequential()self.fc.add_module("fc1", torch.nn.Linear(320, 50))self.fc.add_module("relu_3", torch.nn.ReLU())self.fc.add_module("dropout_3", torch.nn.Dropout())self.fc.add_module("fc2", torch.nn.Linear(50, output_dim))def forward(self, x):x = self.conv.forward(x)x = x.view(-1, 320)return self.fc.forward(x)def train(model, loss, optimizer, x_val, y_val):model.train()optimizer.zero_grad()fx = model.forward(x_val)output = loss.forward(fx, y_val)output.backward()optimizer.step()return output.item()def predict(model, x_val):model.eval()output = model.forward(x_val)return output.data.numpy().argmax(axis=1)def main():torch.manual_seed(42)trX, teX, trY, teY = load_mnist(notallow=False)trX = trX.reshape(-1, 1, 28, 28)teX = teX.reshape(-1, 1, 28, 28)trX = torch.from_numpy(trX).float()teX = torch.from_numpy(teX).float()trY = torch.tensor(trY)n_examples = len(trX)n_classes = 10model = ConvNet(output_dim=n_classes)loss = torch.nn.CrossEntropyLoss(reductinotallow='mean')optimizer = optim.SGD(model.parameters(), lr=0.01, momentum=0.9)batch_size = 100for i in range(100):cost = 0.num_batches = n_examples // batch_sizefor k in range(num_batches):start, end = k * batch_size, (k + 1) * batch_sizecost += train(model, loss, optimizer,trX[start:end], trY[start:end])predY = predict(model, teX)print("Epoch %d, cost = %f, acc = %.2f%%"% (i + 1, cost / num_batches, 100. * np.mean(predY == teY)))if __name__ == "__main__":main()Lapisan pengumpulan memainkan peranan penting dalam CNN, dan tujuan utamanya adalah seperti berikut Point; :
- 降低维度:池化层通过对输入特征图(Feature maps)进行局部区域的下采样操作,降低了特征图的尺寸。这样可以减少后续层中的参数数量,降低计算复杂度,加速训练过程;
- 平移不变性:池化层可以提高网络对输入图像的平移不变性。当图像中的某个特征发生小幅度平移时,池化层的输出仍然具有相似的特征表示。这有助于提高模型的泛化能力,使其能够在不同位置和尺度下识别相同的特征;
- 防止过拟合:通过减少特征图的尺寸,池化层可以降低模型的参数数量,从而降低过拟合的风险;
- 增强特征表达:池化操作可以聚合局部区域内的特征,从而强化和突出更重要的特征信息。常见的池化操作有最大池化(Max Pooling)和平均池化(Average Pooling),分别表示在局部区域内取最大值或平均值作为输出;
(3)print("Epoch %d, cost = %f, acc = %.2f%%" % (i + 1, cost / num_batches, 100. * np.mean(predY == teY)))最后打印当前训练的轮次,损失值和acc,上述的代码输出如下:
...Epoch 91, cost = 0.047302, acc = 99.22%Epoch 92, cost = 0.049026, acc = 99.22%Epoch 93, cost = 0.048953, acc = 99.13%Epoch 94, cost = 0.045235, acc = 99.12%Epoch 95, cost = 0.045136, acc = 99.14%Epoch 96, cost = 0.048240, acc = 99.02%Epoch 97, cost = 0.049063, acc = 99.21%Epoch 98, cost = 0.045373, acc = 99.23%Epoch 99, cost = 0.046127, acc = 99.12%Epoch 100, cost = 0.046864, acc = 99.10%
可以看出最后相同的数据分类,准确率比多层感知机要高(99.10% > 98.59%)。
3、LSTMNet
LSTMNet是使用长短时记忆网络(Long Short-Term Memory, LSTM)构建的神经网络,核心思想是引入了一个名为"记忆单元"的结构,该结构可以在一定程度上保留长期依赖信息,LSTM中的每个单元包括一个输入门(input gate)、一个遗忘门(forget gate)和一个输出门(output gate),这些门的作用是控制信息在记忆单元中的流动,以便网络可以学习何时存储、更新或输出有用的信息。
import numpy as npimport torchfrom torch import optim, nnfrom data_util import load_mnistclass LSTMNet(torch.nn.Module):def __init__(self, input_dim, hidden_dim, output_dim):super(LSTMNet, self).__init__()self.hidden_dim = hidden_dimself.lstm = nn.LSTM(input_dim, hidden_dim)self.linear = nn.Linear(hidden_dim, output_dim, bias=False)def forward(self, x):batch_size = x.size()[1]h0 = torch.zeros([1, batch_size, self.hidden_dim])c0 = torch.zeros([1, batch_size, self.hidden_dim])fx, _ = self.lstm.forward(x, (h0, c0))return self.linear.forward(fx[-1])def train(model, loss, optimizer, x_val, y_val):model.train()optimizer.zero_grad()fx = model.forward(x_val)output = loss.forward(fx, y_val)output.backward()optimizer.step()return output.item()def predict(model, x_val):model.eval()output = model.forward(x_val)return output.data.numpy().argmax(axis=1)def main():torch.manual_seed(42)trX, teX, trY, teY = load_mnist(notallow=False)train_size = len(trY)n_classes = 10seq_length = 28input_dim = 28hidden_dim = 128batch_size = 100epochs = 100trX = trX.reshape(-1, seq_length, input_dim)teX = teX.reshape(-1, seq_length, input_dim)trX = np.swapaxes(trX, 0, 1)teX = np.swapaxes(teX, 0, 1)trX = torch.from_numpy(trX).float()teX = torch.from_numpy(teX).float()trY = torch.tensor(trY)model = LSTMNet(input_dim, hidden_dim, n_classes)loss = torch.nn.CrossEntropyLoss(reductinotallow='mean')optimizer = optim.SGD(model.parameters(), lr=0.01, momentum=0.9)for i in range(epochs):cost = 0.num_batches = train_size // batch_sizefor k in range(num_batches):start, end = k * batch_size, (k + 1) * batch_sizecost += train(model, loss, optimizer,trX[:, start:end, :], trY[start:end])predY = predict(model, teX)print("Epoch %d, cost = %f, acc = %.2f%%" %(i + 1, cost / num_batches, 100. * np.mean(predY == teY)))if __name__ == "__main__":main()(1)以上这段代码通用的部分就不解释了,具体说LSTMNet类:
- self.lstm = nn.LSTM(input_dim, hidden_dim)创建一个LSTM层,输入维度为input_dim,隐藏层维度为hidden_dim;
- self.linear = nn.Linear(hidden_dim, output_dim, bias=False)创建一个线性层(全连接层),输入维度为hidden_dim,输出维度为output_dim,并设置不使用偏置项(bias);
- h0 = torch.zeros([1, batch_size, self.hidden_dim])初始化LSTM层的隐藏状态h0,全零张量,形状为[1, batch_size, hidden_dim];
- c0 = torch.zeros([1, batch_size, self.hidden_dim])初始化LSTM层的细胞状态c0,全零张量,形状为[1, batch_size, hidden_dim];
- fx, _ = self.lstm.forward(x, (h0, c0))将输入数据x以及初始隐藏状态h0和细胞状态c0传入LSTM层,得到LSTM层的输出fx;
- return self.linear.forward(fx[-1])将LSTM层的输出传入线性层进行计算,得到最终输出。这里fx[-1]表示取LSTM层输出的最后一个时间步的数据;
(2)print("第%d轮,损失值=%f,准确率=%.2f%%" % (i + 1, cost / num_batches, 100. * np.mean(predY == teY)))。打印出当前训练轮次的信息,其中包括损失值和准确率,以上代码的输出结果如下:
Epoch 91, cost = 0.000468, acc = 98.57%Epoch 92, cost = 0.000452, acc = 98.57%Epoch 93, cost = 0.000437, acc = 98.58%Epoch 94, cost = 0.000422, acc = 98.57%Epoch 95, cost = 0.000409, acc = 98.58%Epoch 96, cost = 0.000396, acc = 98.58%Epoch 97, cost = 0.000384, acc = 98.57%Epoch 98, cost = 0.000372, acc = 98.56%Epoch 99, cost = 0.000360, acc = 98.55%Epoch 100, cost = 0.000349, acc = 98.55%
4、辅助代码
两篇文章的from data_util import load_mnist的data_util.py代码如下:
import gzip
import os
import urllib.request as request
from os import path
import numpy as np
DATASET_DIR = 'datasets/'
MNIST_FILES = ["train-images-idx3-ubyte.gz", "train-labels-idx1-ubyte.gz", "t10k-images-idx3-ubyte.gz", "t10k-labels-idx1-ubyte.gz"]
def download_file(url, local_path):
dir_path = path.dirname(local_path)
if not path.exists(dir_path):
print("创建目录'%s' ..." % dir_path)
os.makedirs(dir_path)
print("从'%s'下载中 ..." % url)
request.urlretrieve(url, local_path)
def download_mnist(local_path):
url_root = "http://yann.lecun.com/exdb/mnist/"
for f_name in MNIST_FILES:
f_path = os.path.join(local_path, f_name)
if not path.exists(f_path):
download_file(url_root + f_name, f_path)
def one_hot(x, n):
if type(x) == list:
x = np.array(x)
x = x.flatten()
o_h = np.zeros((len(x), n))
o_h[np.arange(len(x)), x] = 1
return o_h
def load_mnist(ntrain=60000, ntest=10000, notallow=True):
data_dir = os.path.join(DATASET_DIR, 'mnist/')
if not path.exists(data_dir):
download_mnist(data_dir)
else:
# 检查所有文件
checks = [path.exists(os.path.join(data_dir, f)) for f in MNIST_FILES]
if not np.all(checks):
download_mnist(data_dir)
with gzip.open(os.path.join(data_dir, 'train-images-idx3-ubyte.gz')) as fd:
buf = fd.read()
loaded = np.frombuffer(buf, dtype=np.uint8)
trX = loaded[16:].reshape((60000, 28 * 28)).astype(float)
with gzip.open(os.path.join(data_dir, 'train-labels-idx1-ubyte.gz')) as fd:
buf = fd.read()
loaded = np.frombuffer(buf, dtype=np.uint8)
trY = loaded[8:].reshape((60000))
with gzip.open(os.path.join(data_dir, 't10k-images-idx3-ubyte.gz')) as fd:
buf = fd.read()
loaded = np.frombuffer(buf, dtype=np.uint8)
teX = loaded[16:].reshape((10000, 28 * 28)).astype(float)
with gzip.open(os.path.join(data_dir, 't10k-labels-idx1-ubyte.gz')) as fd:
buf = fd.read()
loaded = np.frombuffer(buf, dtype=np.uint8)
teY = loaded[8:].reshape((10000))
trX /= 255.
teX /= 255.
trX = trX[:ntrain]
trY = trY[:ntrain]
teX = teX[:ntest]
teY = teY[:ntest]
if onehot:
trY = one_hot(trY, 10)
teY = one_hot(teY, 10)
else:
trY = np.asarray(trY)
teY = np.asarray(teY)
return trX, teX, trY, teYAtas ialah kandungan terperinci Pembelajaran Mesin |. Tutorial Ringkas PyTorch Bahagian 2. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

AI Hentai Generator
Menjana ai hentai secara percuma.

Artikel Panas
Alat panas

Notepad++7.3.1
Editor kod yang mudah digunakan dan percuma

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

Hantar Studio 13.0.1
Persekitaran pembangunan bersepadu PHP yang berkuasa

Dreamweaver CS6
Alat pembangunan web visual

SublimeText3 versi Mac
Perisian penyuntingan kod peringkat Tuhan (SublimeText3)
Topik panas
 1377
1377
 52
52

 15 alat anotasi imej percuma sumber terbuka disyorkan
Mar 28, 2024 pm 01:21 PM
15 alat anotasi imej percuma sumber terbuka disyorkan
Mar 28, 2024 pm 01:21 PM
Anotasi imej ialah proses mengaitkan label atau maklumat deskriptif dengan imej untuk memberi makna dan penjelasan yang lebih mendalam kepada kandungan imej. Proses ini penting untuk pembelajaran mesin, yang membantu melatih model penglihatan untuk mengenal pasti elemen individu dalam imej dengan lebih tepat. Dengan menambahkan anotasi pada imej, komputer boleh memahami semantik dan konteks di sebalik imej, dengan itu meningkatkan keupayaan untuk memahami dan menganalisis kandungan imej. Anotasi imej mempunyai pelbagai aplikasi, meliputi banyak bidang, seperti penglihatan komputer, pemprosesan bahasa semula jadi dan model penglihatan graf Ia mempunyai pelbagai aplikasi, seperti membantu kenderaan dalam mengenal pasti halangan di jalan raya, dan membantu dalam proses. pengesanan dan diagnosis penyakit melalui pengecaman imej perubatan. Artikel ini terutamanya mengesyorkan beberapa alat anotasi imej sumber terbuka dan percuma yang lebih baik. 1.Makesen
 Artikel ini akan membawa anda memahami SHAP: penjelasan model untuk pembelajaran mesin
Jun 01, 2024 am 10:58 AM
Artikel ini akan membawa anda memahami SHAP: penjelasan model untuk pembelajaran mesin
Jun 01, 2024 am 10:58 AM
Dalam bidang pembelajaran mesin dan sains data, kebolehtafsiran model sentiasa menjadi tumpuan penyelidik dan pengamal. Dengan aplikasi meluas model yang kompleks seperti kaedah pembelajaran mendalam dan ensemble, memahami proses membuat keputusan model menjadi sangat penting. AI|XAI yang boleh dijelaskan membantu membina kepercayaan dan keyakinan dalam model pembelajaran mesin dengan meningkatkan ketelusan model. Meningkatkan ketelusan model boleh dicapai melalui kaedah seperti penggunaan meluas pelbagai model yang kompleks, serta proses membuat keputusan yang digunakan untuk menerangkan model. Kaedah ini termasuk analisis kepentingan ciri, anggaran selang ramalan model, algoritma kebolehtafsiran tempatan, dsb. Analisis kepentingan ciri boleh menerangkan proses membuat keputusan model dengan menilai tahap pengaruh model ke atas ciri input. Anggaran selang ramalan model
 Telus! Analisis mendalam tentang prinsip model pembelajaran mesin utama!
Apr 12, 2024 pm 05:55 PM
Telus! Analisis mendalam tentang prinsip model pembelajaran mesin utama!
Apr 12, 2024 pm 05:55 PM
Dalam istilah orang awam, model pembelajaran mesin ialah fungsi matematik yang memetakan data input kepada output yang diramalkan. Secara lebih khusus, model pembelajaran mesin ialah fungsi matematik yang melaraskan parameter model dengan belajar daripada data latihan untuk meminimumkan ralat antara output yang diramalkan dan label sebenar. Terdapat banyak model dalam pembelajaran mesin, seperti model regresi logistik, model pepohon keputusan, model mesin vektor sokongan, dll. Setiap model mempunyai jenis data dan jenis masalah yang berkenaan. Pada masa yang sama, terdapat banyak persamaan antara model yang berbeza, atau terdapat laluan tersembunyi untuk evolusi model. Mengambil perceptron penyambung sebagai contoh, dengan meningkatkan bilangan lapisan tersembunyi perceptron, kita boleh mengubahnya menjadi rangkaian neural yang mendalam. Jika fungsi kernel ditambah pada perceptron, ia boleh ditukar menjadi SVM. yang ini
 Kenal pasti overfitting dan underfitting melalui lengkung pembelajaran
Apr 29, 2024 pm 06:50 PM
Kenal pasti overfitting dan underfitting melalui lengkung pembelajaran
Apr 29, 2024 pm 06:50 PM
Artikel ini akan memperkenalkan cara mengenal pasti pemasangan lampau dan kekurangan dalam model pembelajaran mesin secara berkesan melalui keluk pembelajaran. Underfitting dan overfitting 1. Overfitting Jika model terlampau latihan pada data sehingga ia mempelajari bunyi daripadanya, maka model tersebut dikatakan overfitting. Model yang dipasang terlebih dahulu mempelajari setiap contoh dengan sempurna sehingga ia akan salah mengklasifikasikan contoh yang tidak kelihatan/baharu. Untuk model terlampau, kami akan mendapat skor set latihan yang sempurna/hampir sempurna dan set pengesahan/skor ujian yang teruk. Diubah suai sedikit: "Punca overfitting: Gunakan model yang kompleks untuk menyelesaikan masalah mudah dan mengekstrak bunyi daripada data. Kerana set data kecil sebagai set latihan mungkin tidak mewakili perwakilan yang betul bagi semua data. 2. Underfitting Heru
 Evolusi kecerdasan buatan dalam penerokaan angkasa lepas dan kejuruteraan penempatan manusia
Apr 29, 2024 pm 03:25 PM
Evolusi kecerdasan buatan dalam penerokaan angkasa lepas dan kejuruteraan penempatan manusia
Apr 29, 2024 pm 03:25 PM
Pada tahun 1950-an, kecerdasan buatan (AI) dilahirkan. Ketika itulah penyelidik mendapati bahawa mesin boleh melakukan tugas seperti manusia, seperti berfikir. Kemudian, pada tahun 1960-an, Jabatan Pertahanan A.S. membiayai kecerdasan buatan dan menubuhkan makmal untuk pembangunan selanjutnya. Penyelidik sedang mencari aplikasi untuk kecerdasan buatan dalam banyak bidang, seperti penerokaan angkasa lepas dan kelangsungan hidup dalam persekitaran yang melampau. Penerokaan angkasa lepas ialah kajian tentang alam semesta, yang meliputi seluruh alam semesta di luar bumi. Angkasa lepas diklasifikasikan sebagai persekitaran yang melampau kerana keadaannya berbeza daripada di Bumi. Untuk terus hidup di angkasa, banyak faktor mesti dipertimbangkan dan langkah berjaga-jaga mesti diambil. Para saintis dan penyelidik percaya bahawa meneroka ruang dan memahami keadaan semasa segala-galanya boleh membantu memahami cara alam semesta berfungsi dan bersedia untuk menghadapi kemungkinan krisis alam sekitar
 Melaksanakan Algoritma Pembelajaran Mesin dalam C++: Cabaran dan Penyelesaian Biasa
Jun 03, 2024 pm 01:25 PM
Melaksanakan Algoritma Pembelajaran Mesin dalam C++: Cabaran dan Penyelesaian Biasa
Jun 03, 2024 pm 01:25 PM
Cabaran biasa yang dihadapi oleh algoritma pembelajaran mesin dalam C++ termasuk pengurusan memori, multi-threading, pengoptimuman prestasi dan kebolehselenggaraan. Penyelesaian termasuk menggunakan penunjuk pintar, perpustakaan benang moden, arahan SIMD dan perpustakaan pihak ketiga, serta mengikuti garis panduan gaya pengekodan dan menggunakan alat automasi. Kes praktikal menunjukkan cara menggunakan perpustakaan Eigen untuk melaksanakan algoritma regresi linear, mengurus memori dengan berkesan dan menggunakan operasi matriks berprestasi tinggi.
 AI yang boleh dijelaskan: Menerangkan model AI/ML yang kompleks
Jun 03, 2024 pm 10:08 PM
AI yang boleh dijelaskan: Menerangkan model AI/ML yang kompleks
Jun 03, 2024 pm 10:08 PM
Penterjemah |. Disemak oleh Li Rui |. Chonglou Model kecerdasan buatan (AI) dan pembelajaran mesin (ML) semakin kompleks hari ini, dan output yang dihasilkan oleh model ini adalah kotak hitam – tidak dapat dijelaskan kepada pihak berkepentingan. AI Boleh Dijelaskan (XAI) bertujuan untuk menyelesaikan masalah ini dengan membolehkan pihak berkepentingan memahami cara model ini berfungsi, memastikan mereka memahami cara model ini sebenarnya membuat keputusan, dan memastikan ketelusan dalam sistem AI, Amanah dan akauntabiliti untuk menyelesaikan masalah ini. Artikel ini meneroka pelbagai teknik kecerdasan buatan (XAI) yang boleh dijelaskan untuk menggambarkan prinsip asasnya. Beberapa sebab mengapa AI boleh dijelaskan adalah penting Kepercayaan dan ketelusan: Untuk sistem AI diterima secara meluas dan dipercayai, pengguna perlu memahami cara keputusan dibuat
 Lima sekolah pembelajaran mesin yang anda tidak tahu
Jun 05, 2024 pm 08:51 PM
Lima sekolah pembelajaran mesin yang anda tidak tahu
Jun 05, 2024 pm 08:51 PM
Pembelajaran mesin ialah cabang penting kecerdasan buatan yang memberikan komputer keupayaan untuk belajar daripada data dan meningkatkan keupayaan mereka tanpa diprogramkan secara eksplisit. Pembelajaran mesin mempunyai pelbagai aplikasi dalam pelbagai bidang, daripada pengecaman imej dan pemprosesan bahasa semula jadi kepada sistem pengesyoran dan pengesanan penipuan, dan ia mengubah cara hidup kita. Terdapat banyak kaedah dan teori yang berbeza dalam bidang pembelajaran mesin, antaranya lima kaedah yang paling berpengaruh dipanggil "Lima Sekolah Pembelajaran Mesin". Lima sekolah utama ialah sekolah simbolik, sekolah sambungan, sekolah evolusi, sekolah Bayesian dan sekolah analogi. 1. Simbolisme, juga dikenali sebagai simbolisme, menekankan penggunaan simbol untuk penaakulan logik dan ekspresi pengetahuan. Aliran pemikiran ini percaya bahawa pembelajaran adalah proses penolakan terbalik, melalui sedia ada
