
 Peranti teknologi
AI
Sparse4D v3 ada di sini! Memajukan pengesanan dan penjejakan 3D hujung ke hujung
Peranti teknologi
AI
Sparse4D v3 ada di sini! Memajukan pengesanan dan penjejakan 3D hujung ke hujung
Sparse4D v3 ada di sini! Memajukan pengesanan dan penjejakan 3D hujung ke hujung

Tajuk baharu: Sparse4D v3: Memajukan teknologi pengesanan dan penjejakan 3D hujung ke hujung
Pautan kertas: https://arxiv.org/pdf/2311.11722.pdf
Kandungan yang perlu ditulis semula ialah: Pautan kod: https:// github.com/linxuewu/Sparse4D
Kandungan yang ditulis semula: Gabungan pengarang ialah Horizon Corporation
Idea tesis:
Dalam pengesanan sistem pengesanan pemanduan autonomi 3 dan dua tugasan asas pengesanan pemanduan autonomi dan 3, pengesanan pemanduan. Artikel ini melihat dengan lebih mendalam kawasan ini berdasarkan rangka kerja Sparse4D. Kertas kerja ini memperkenalkan dua tugas latihan tambahan (denoising instance temporal-Denoising Instance Temporal dan anggaran kualiti-Anggaran Kualiti), dan mencadangkan perhatian yang dipisahkan (decoupled attention) untuk penambahbaikan struktur, dengan itu meningkatkan prestasi pengesanan dengan ketara. Tambahan pula, kertas ini memanjangkan pengesan kepada penjejak menggunakan kaedah mudah yang memberikan ID contoh semasa inferens, seterusnya menyerlahkan kelebihan algoritma berasaskan pertanyaan. Eksperimen yang meluas pada penanda aras nuScenes mengesahkan keberkesanan penambahbaikan yang dicadangkan. Menggunakan ResNet50 sebagai tulang belakang, mAP, NDS dan AMOTA masing-masing meningkat sebanyak 3.0%, 2.2% dan 7.6%, masing-masing mencapai 46.9%, 56.1% dan 49.0%. Model terbaik dalam artikel ini mencapai 71.9% NDS dan 67.7% AMOTA pada set ujian nuScenes
Sumbangan utama:
Sparse4D-v3 ialah rangka kerja persepsi 3D yang berkuasa yang mencadangkan tiga strategi berkesan: Contoh siri masa yang berkualiti anggaran dan menyahganding perhatian
Kertas kerja ini memanjangkan Sparse4D ke dalam model penjejakan hujung ke hujung.
Kertas kerja ini menunjukkan keberkesanan penambahbaikan nuScenes, mencapai prestasi terkini dalam tugas pengesanan dan pengesanan.
Reka Bentuk Rangkaian:
Pertama, diperhatikan bahawa algoritma jarang menghadapi cabaran yang lebih besar dalam penumpuan berbanding dengan algoritma padat, sekali gus menjejaskan prestasi akhir. Masalah ini telah dikaji dengan baik dalam bidang pengesanan 2D [17, 48, 53], terutamanya kerana algoritma jarang menggunakan padanan sampel positif satu-dengan-satu. Kaedah pemadanan ini tidak stabil pada peringkat awal latihan, dan dibandingkan dengan padanan satu-ke-banyak, bilangan sampel positif adalah terhad, sekali gus mengurangkan kecekapan latihan penyahkod. Tambahan pula, Sparse4D menggunakan pensampelan ciri yang jarang dan bukannya perhatian silang global, yang seterusnya menghalang penumpuan pengekod disebabkan oleh kekurangan sampel positif. Dalam Sparse4Dv2, pengawasan mendalam yang padat diperkenalkan untuk mengurangkan sebahagian isu penumpuan yang dihadapi oleh pengekod imej. Matlamat utama kertas ini adalah untuk meningkatkan prestasi model dengan memberi tumpuan kepada kestabilan latihan penyahkod. Kertas kerja ini menggunakan tugas denoising sebagai penyeliaan tambahan dan memanjangkan teknologi denoising daripada pengesanan bingkai tunggal 2D kepada pengesanan siri masa 3D. Ini bukan sahaja memastikan padanan sampel positif yang stabil, tetapi juga meningkatkan bilangan sampel positif dengan ketara. Selain itu, kertas kerja ini juga memperkenalkan tugas penilaian kualiti sebagai penyeliaan tambahan. Ini menjadikan skor keyakinan output lebih munasabah, meningkatkan ketepatan kedudukan keputusan pengesanan, dan dengan itu memperoleh penunjuk penilaian yang lebih tinggi. Di samping itu, artikel ini menambah baik struktur modul perhatian kendiri contoh dan perhatian silang temporal dalam Sparse4D, dan memperkenalkan mekanisme perhatian yang dipisahkan yang bertujuan untuk mengurangkan gangguan ciri dalam proses pengiraan berat perhatian. Dengan menggunakan pembenaman anchor dan ciri contoh sebagai input kepada pengiraan perhatian, kejadian dengan outlier dalam pemberat perhatian boleh dikurangkan. Ini boleh mencerminkan dengan lebih tepat korelasi antara ciri sasaran, dengan itu mencapai pengagregatan ciri yang betul. Makalah ini menggunakan sambungan dan bukannya mekanisme perhatian untuk mengurangkan ralat ini dengan ketara. Kaedah pembesaran ini mempunyai persamaan dengan DETR bersyarat, tetapi perbezaan utama ialah kertas kerja ini menekankan perhatian antara pertanyaan, manakala DETR bersyarat memfokuskan perhatian silang antara pertanyaan dan ciri imej. Di samping itu, artikel ini juga melibatkan kaedah pengekodan yang unik
Untuk meningkatkan keupayaan hujung ke hujung sistem persepsi, artikel ini mengkaji kaedah menyepadukan tugas penjejakan berbilang sasaran 3D ke dalam rangka kerja Sparse4D untuk terus mengeluarkan trajektori gerakan sasaran. Tidak seperti kaedah pengesanan berasaskan pengesanan, kertas kerja ini menyepadukan semua fungsi penjejakan ke dalam pengesan dengan menghapuskan keperluan untuk perkaitan dan penapisan data. Tambahan pula, tidak seperti kaedah pengesanan dan pengesanan bersama sedia ada, penjejak kami tidak memerlukan pengubahsuaian atau pelarasan fungsi kehilangan semasa latihan. Ia tidak memerlukan penyediaan ID kebenaran asas, tetapi melaksanakan regresi contoh-untuk-jejak yang dipratentukan. Pelaksanaan penjejakan artikel ini menyepadukan sepenuhnya pengesan dan penjejak, tanpa mengubah suai proses latihan pengesan, dan tanpa penalaan halus tambahan
Ini ialah Rajah 1 tentang gambaran keseluruhan rangka kerja Sparse4D Input ialah a video berbilang tontonan dan output adalah kesemuanya Hasil persepsi bingkai
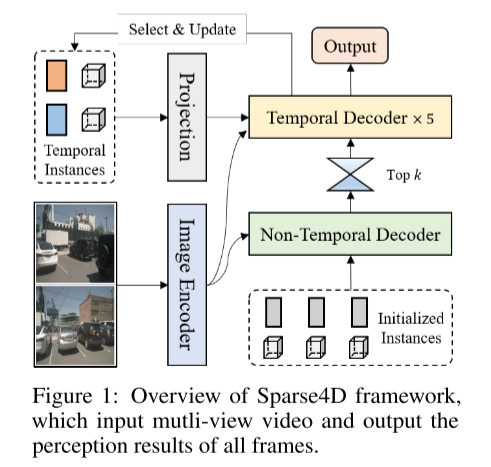
Rajah 2: Kecekapan inferens (FPS) - prestasi persepsi (mAP) pada set data pengesahan nuScenes bagi algoritma yang berbeza.
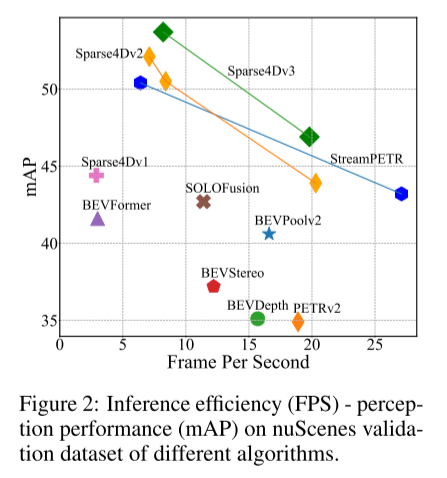
Rajah 3: Visualisasi pemberat perhatian contohnya perhatian diri: 1) Baris pertama menunjukkan pemberat perhatian dalam perhatian diri biasa, di mana pejalan kaki dalam bulatan merah ditunjukkan konsisten dengan kenderaan sasaran (hijau kotak ) korelasi yang tidak dijangka. 2) Baris kedua menunjukkan berat perhatian dalam perhatian yang dipisahkan, yang menyelesaikan masalah ini dengan berkesan.
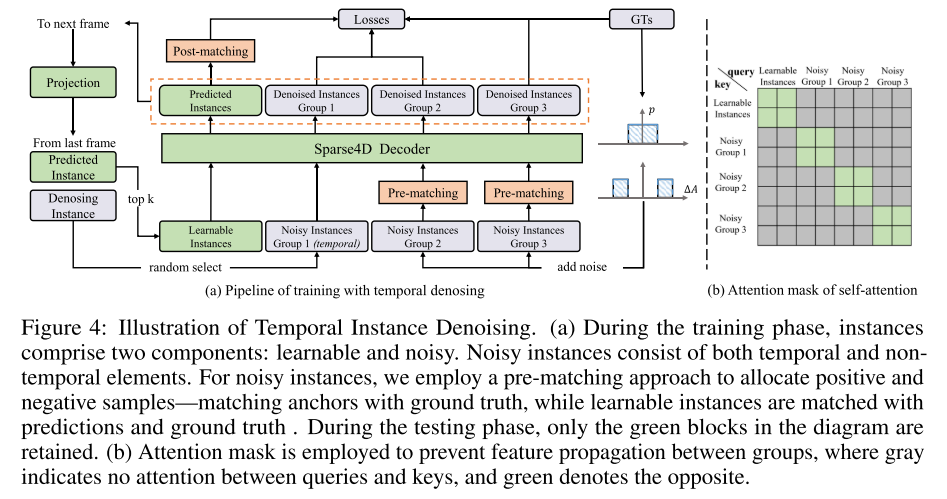
Gambar keempat menunjukkan contoh contoh siri masa denoising. Semasa fasa latihan, contoh terdiri daripada dua bahagian: boleh dipelajari dan bising. Kejadian bunyi terdiri daripada unsur temporal dan bukan temporal. Kertas kerja ini menggunakan kaedah pra-padanan untuk memperuntukkan sampel positif dan negatif, iaitu pemadanan sauh dengan kebenaran asas, manakala contoh yang boleh dipelajari dipadankan dengan ramalan dan kebenaran asas. Semasa fasa ujian, hanya blok hijau yang tinggal. Untuk mengelakkan ciri merebak antara kumpulan, topeng perhatian digunakan Kelabu bermakna tiada perhatian antara pertanyaan dan kekunci, hijau bermaksud sebaliknya
Artikel ini mula-mula mencadangkan kaedah untuk meningkatkan prestasi pengesanan Sparse4D. Peningkatan ini terutamanya merangkumi tiga aspek: denoising contoh temporal, anggaran kualiti dan perhatian yang dipisahkan. Selepas itu, artikel tersebut menerangkan proses melanjutkan Sparse4D ke dalam model penjejakan hujung ke hujung. Percubaan artikel ini pada nuScenes menunjukkan bahawa peningkatan ini meningkatkan prestasi dengan ketara, meletakkan Sparse4Dv3 di barisan hadapan. 
Petikan:
Lin, X., Pei, Z., Lin, T., Huang, L., & Su, Z . (2023 Sparse4D v3: Memajukan Pengesanan dan Penjejakan 3D Hujung ke Hujung.  ArXiv/2311.11722
ArXiv/2311.11722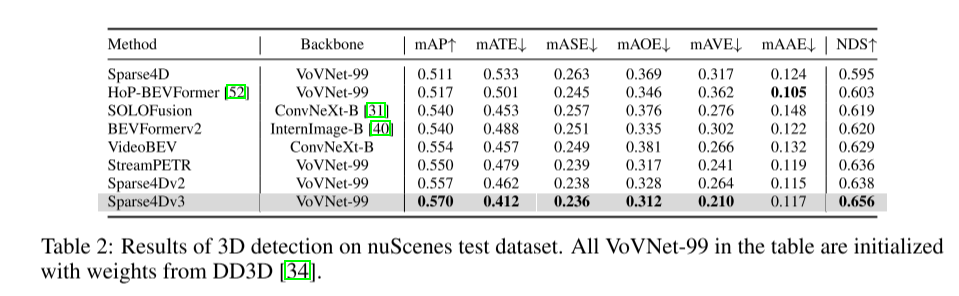 .
.
Atas ialah kandungan terperinci Sparse4D v3 ada di sini! Memajukan pengesanan dan penjejakan 3D hujung ke hujung. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

AI Hentai Generator
Menjana ai hentai secara percuma.

Artikel Panas
Alat panas

Notepad++7.3.1
Editor kod yang mudah digunakan dan percuma

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

Hantar Studio 13.0.1
Persekitaran pembangunan bersepadu PHP yang berkuasa

Dreamweaver CS6
Alat pembangunan web visual

SublimeText3 versi Mac
Perisian penyuntingan kod peringkat Tuhan (SublimeText3)
Topik panas
 1375
1375
 52
52

 Sumber terbuka! Di luar ZoeDepth! DepthFM: Anggaran kedalaman monokular yang cepat dan tepat!
Apr 03, 2024 pm 12:04 PM
Sumber terbuka! Di luar ZoeDepth! DepthFM: Anggaran kedalaman monokular yang cepat dan tepat!
Apr 03, 2024 pm 12:04 PM
0. Apakah fungsi artikel ini? Kami mencadangkan DepthFM: model anggaran kedalaman monokular generatif yang serba boleh dan pantas. Sebagai tambahan kepada tugas anggaran kedalaman tradisional, DepthFM juga menunjukkan keupayaan terkini dalam tugas hiliran seperti mengecat kedalaman. DepthFM cekap dan boleh mensintesis peta kedalaman dalam beberapa langkah inferens. Mari kita baca karya ini bersama-sama ~ 1. Tajuk maklumat kertas: DepthFM: FastMonocularDepthEstimationwithFlowMatching Pengarang: MingGui, JohannesS.Fischer, UlrichPrestel, PingchuanMa, Dmytr
 Bagaimana untuk menyelesaikan masalah ekor panjang dalam senario pemanduan autonomi?
Jun 02, 2024 pm 02:44 PM
Bagaimana untuk menyelesaikan masalah ekor panjang dalam senario pemanduan autonomi?
Jun 02, 2024 pm 02:44 PM
Semalam semasa temu bual, saya telah ditanya sama ada saya telah membuat sebarang soalan berkaitan ekor panjang, jadi saya fikir saya akan memberikan ringkasan ringkas. Masalah ekor panjang pemanduan autonomi merujuk kepada kes tepi dalam kenderaan autonomi, iaitu, kemungkinan senario dengan kebarangkalian yang rendah untuk berlaku. Masalah ekor panjang yang dirasakan adalah salah satu sebab utama yang kini mengehadkan domain reka bentuk pengendalian kenderaan autonomi pintar satu kenderaan. Seni bina asas dan kebanyakan isu teknikal pemanduan autonomi telah diselesaikan, dan baki 5% masalah ekor panjang secara beransur-ansur menjadi kunci untuk menyekat pembangunan pemanduan autonomi. Masalah ini termasuk pelbagai senario yang berpecah-belah, situasi yang melampau dan tingkah laku manusia yang tidak dapat diramalkan. "Ekor panjang" senario tepi dalam pemanduan autonomi merujuk kepada kes tepi dalam kenderaan autonomi (AVs) kes Edge adalah senario yang mungkin dengan kebarangkalian yang rendah untuk berlaku. kejadian yang jarang berlaku ini
 Hello, Atlas elektrik! Robot Boston Dynamics hidup semula, gerakan pelik 180 darjah menakutkan Musk
Apr 18, 2024 pm 07:58 PM
Hello, Atlas elektrik! Robot Boston Dynamics hidup semula, gerakan pelik 180 darjah menakutkan Musk
Apr 18, 2024 pm 07:58 PM
Boston Dynamics Atlas secara rasmi memasuki era robot elektrik! Semalam, Atlas hidraulik hanya "menangis" menarik diri daripada peringkat sejarah Hari ini, Boston Dynamics mengumumkan bahawa Atlas elektrik sedang berfungsi. Nampaknya dalam bidang robot humanoid komersial, Boston Dynamics berazam untuk bersaing dengan Tesla. Selepas video baharu itu dikeluarkan, ia telah pun ditonton oleh lebih sejuta orang dalam masa sepuluh jam sahaja. Orang lama pergi dan peranan baru muncul. Ini adalah keperluan sejarah. Tidak dinafikan bahawa tahun ini adalah tahun letupan robot humanoid. Netizen mengulas: Kemajuan robot telah menjadikan majlis pembukaan tahun ini kelihatan seperti manusia, dan tahap kebebasan adalah jauh lebih besar daripada manusia Tetapi adakah ini benar-benar bukan filem seram? Pada permulaan video, Atlas berbaring dengan tenang di atas tanah, seolah-olah terlentang. Apa yang berikut adalah rahang-jatuh
 Versi Kuaishou Sora 'Ke Ling' dibuka untuk ujian: menghasilkan video lebih 120-an, memahami fizik dengan lebih baik dan boleh memodelkan pergerakan kompleks dengan tepat
Jun 11, 2024 am 09:51 AM
Versi Kuaishou Sora 'Ke Ling' dibuka untuk ujian: menghasilkan video lebih 120-an, memahami fizik dengan lebih baik dan boleh memodelkan pergerakan kompleks dengan tepat
Jun 11, 2024 am 09:51 AM
Apa? Adakah Zootopia dibawa menjadi realiti oleh AI domestik? Didedahkan bersama-sama dengan video itu ialah model penjanaan video domestik berskala besar baharu yang dipanggil "Keling". Sora menggunakan laluan teknikal yang serupa dan menggabungkan beberapa inovasi teknologi yang dibangunkan sendiri untuk menghasilkan video yang bukan sahaja mempunyai pergerakan yang besar dan munasabah, tetapi juga mensimulasikan ciri-ciri dunia fizikal dan mempunyai keupayaan gabungan konsep dan imaginasi yang kuat. Mengikut data, Keling menyokong penjanaan video ultra panjang sehingga 2 minit pada 30fps, dengan resolusi sehingga 1080p dan menyokong berbilang nisbah aspek. Satu lagi perkara penting ialah Keling bukanlah demo atau demonstrasi hasil video yang dikeluarkan oleh makmal, tetapi aplikasi peringkat produk yang dilancarkan oleh Kuaishou, pemain terkemuka dalam bidang video pendek. Selain itu, tumpuan utama adalah untuk menjadi pragmatik, bukan untuk menulis cek kosong, dan pergi ke dalam talian sebaik sahaja ia dikeluarkan Model besar Ke Ling telah pun dikeluarkan di Kuaiying.
 Daya hidup kecerdasan super membangkitkan! Tetapi dengan kedatangan AI yang mengemas kini sendiri, ibu tidak perlu lagi bimbang tentang kesesakan data
Apr 29, 2024 pm 06:55 PM
Daya hidup kecerdasan super membangkitkan! Tetapi dengan kedatangan AI yang mengemas kini sendiri, ibu tidak perlu lagi bimbang tentang kesesakan data
Apr 29, 2024 pm 06:55 PM
Saya menangis hingga mati. Dunia sedang membina model besar. Data di Internet tidak mencukupi. Model latihan kelihatan seperti "The Hunger Games", dan penyelidik AI di seluruh dunia bimbang tentang cara memberi makan data ini kepada pemakan yang rakus. Masalah ini amat ketara dalam tugas berbilang modal. Pada masa mereka mengalami kerugian, pasukan pemula dari Jabatan Universiti Renmin China menggunakan model baharu mereka sendiri untuk menjadi yang pertama di China untuk menjadikan "suapan data yang dijana model itu sendiri" menjadi kenyataan. Selain itu, ia merupakan pendekatan serampang dua mata dari segi pemahaman dan sisi penjanaan Kedua-dua pihak boleh menjana data baharu berbilang modal yang berkualiti tinggi dan memberikan maklum balas data kepada model itu sendiri. Apakah model? Awaker 1.0, model berbilang modal besar yang baru sahaja muncul di Forum Zhongguancun. Siapa pasukan itu? Enjin Sophon. Diasaskan oleh Gao Yizhao, pelajar kedoktoran di Sekolah Kecerdasan Buatan Hillhouse Universiti Renmin.
 Tentera Udara A.S. mempamerkan jet pejuang AI pertamanya dengan profil tinggi! Menteri secara peribadi menjalankan pandu uji tanpa campur tangan semasa keseluruhan proses, dan 100,000 baris kod telah diuji selama 21 kali.
May 07, 2024 pm 05:00 PM
Tentera Udara A.S. mempamerkan jet pejuang AI pertamanya dengan profil tinggi! Menteri secara peribadi menjalankan pandu uji tanpa campur tangan semasa keseluruhan proses, dan 100,000 baris kod telah diuji selama 21 kali.
May 07, 2024 pm 05:00 PM
Baru-baru ini, bulatan tentera telah terharu dengan berita: jet pejuang tentera AS kini boleh melengkapkan pertempuran udara automatik sepenuhnya menggunakan AI. Ya, baru-baru ini, jet pejuang AI tentera AS telah didedahkan buat pertama kali, mendedahkan misterinya. Nama penuh pesawat pejuang ini ialah Variable Stability Simulator Test Aircraft (VISTA). Ia diterbangkan sendiri oleh Setiausaha Tentera Udara AS untuk mensimulasikan pertempuran udara satu lawan satu. Pada 2 Mei, Setiausaha Tentera Udara A.S. Frank Kendall berlepas menggunakan X-62AVISTA di Pangkalan Tentera Udara Edwards Ambil perhatian bahawa semasa penerbangan selama satu jam, semua tindakan penerbangan telah diselesaikan secara autonomi oleh AI! Kendall berkata - "Sejak beberapa dekad yang lalu, kami telah memikirkan tentang potensi tanpa had pertempuran udara-ke-udara autonomi, tetapi ia sentiasa kelihatan di luar jangkauan." Namun kini,
 SOTA terbaharu nuScenes |. SparseAD: Pertanyaan jarang membantu pemanduan autonomi hujung ke hujung yang cekap!
Apr 17, 2024 pm 06:22 PM
SOTA terbaharu nuScenes |. SparseAD: Pertanyaan jarang membantu pemanduan autonomi hujung ke hujung yang cekap!
Apr 17, 2024 pm 06:22 PM
Ditulis di hadapan & titik permulaan Paradigma hujung ke hujung menggunakan rangka kerja bersatu untuk mencapai pelbagai tugas dalam sistem pemanduan autonomi. Walaupun kesederhanaan dan kejelasan paradigma ini, prestasi kaedah pemanduan autonomi hujung ke hujung pada subtugas masih jauh ketinggalan berbanding kaedah tugasan tunggal. Pada masa yang sama, ciri pandangan mata burung (BEV) padat yang digunakan secara meluas dalam kaedah hujung ke hujung sebelum ini menyukarkan untuk membuat skala kepada lebih banyak modaliti atau tugasan. Paradigma pemanduan autonomi hujung ke hujung (SparseAD) tertumpu carian jarang dicadangkan di sini, di mana carian jarang mewakili sepenuhnya keseluruhan senario pemanduan, termasuk ruang, masa dan tugas, tanpa sebarang perwakilan BEV yang padat. Khususnya, seni bina jarang bersatu direka bentuk untuk kesedaran tugas termasuk pengesanan, penjejakan dan pemetaan dalam talian. Di samping itu, berat
 Mari kita bincangkan tentang sistem pemanduan autonomi hujung ke hujung dan generasi seterusnya, serta beberapa salah faham tentang pemanduan autonomi hujung ke hujung?
Apr 15, 2024 pm 04:13 PM
Mari kita bincangkan tentang sistem pemanduan autonomi hujung ke hujung dan generasi seterusnya, serta beberapa salah faham tentang pemanduan autonomi hujung ke hujung?
Apr 15, 2024 pm 04:13 PM
Pada bulan lalu, atas sebab-sebab yang diketahui umum, saya telah mengadakan pertukaran yang sangat intensif dengan pelbagai guru dan rakan sekelas dalam industri. Topik yang tidak dapat dielakkan dalam pertukaran secara semula jadi adalah hujung ke hujung dan Tesla FSDV12 yang popular. Saya ingin mengambil kesempatan ini untuk menyelesaikan beberapa buah fikiran dan pendapat saya pada masa ini untuk rujukan dan perbincangan anda. Bagaimana untuk mentakrifkan sistem pemanduan autonomi hujung ke hujung, dan apakah masalah yang sepatutnya dijangka diselesaikan hujung ke hujung? Menurut definisi yang paling tradisional, sistem hujung ke hujung merujuk kepada sistem yang memasukkan maklumat mentah daripada penderia dan secara langsung mengeluarkan pembolehubah yang membimbangkan tugas. Sebagai contoh, dalam pengecaman imej, CNN boleh dipanggil hujung-ke-hujung berbanding kaedah pengekstrak ciri + pengelas tradisional. Dalam tugas pemanduan autonomi, masukkan data daripada pelbagai penderia (kamera/LiDAR
