
 Peranti teknologi
AI
Simulasi pemanduan lanjutan: Pembinaan semula pemandangan memandu dengan data sekeliling yang realistik
Peranti teknologi
AI
Simulasi pemanduan lanjutan: Pembinaan semula pemandangan memandu dengan data sekeliling yang realistik
Simulasi pemanduan lanjutan: Pembinaan semula pemandangan memandu dengan data sekeliling yang realistik

Tajuk asal: DrivingGaussian: Composite Gaussian point rendering untuk adegan pemanduan autonomi dinamik ambien
Sila klik di sini untuk melihat kertas: https://arxiv.org/pdf/2312.07920.pdf
Pautan kod: https://pkuv. github.io/DrivingGaussian/
Gabungan pengarang: Universiti Peking Universiti Penyelidikan Google California, Merced
Idea tesis:
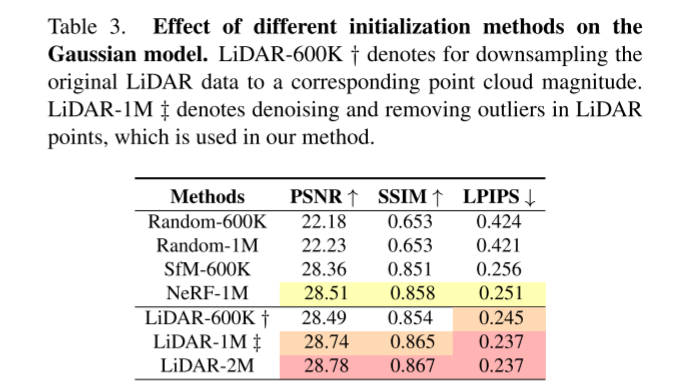
Kertas kerja ini mencadangkan DrivingGaussian, yang merupakan penyelesaian autonomis kecekapan tinggi dan kos efektif untuk pemanduan dinamik . Untuk adegan kompleks dengan objek bergerak, kertas ini mula-mula menggunakan Gaussian 3D statik tambahan untuk memodelkan latar belakang statik keseluruhan adegan secara berurutan dan progresif. Kemudian, kertas kerja ini menggunakan graf Gaussian dinamik komposit untuk memproses berbilang objek bergerak, membina semula setiap objek secara individu dan memulihkan kedudukan tepat dan hubungan oklusi mereka di tempat kejadian. Makalah ini selanjutnya menggunakan LiDAR priors untuk Gaussian Splatting untuk membina semula pemandangan dengan lebih terperinci dan mengekalkan konsistensi panorama. DrivingGaussian mengatasi kaedah sedia ada dalam pembinaan semula pemandangan memandu dan membolehkan sintesis pandangan sekeliling yang realistik dengan ketekalan tinggi dan konsisten berbilang kamera.
Sumbangan utama:
Menurut artikel ini, DrivingGaussian ialah rangka kerja pertama yang menggunakan teknologi percikan Gaussian komposit untuk representasi dan pemodelan pemandangan pemanduan dinamik berskala besar
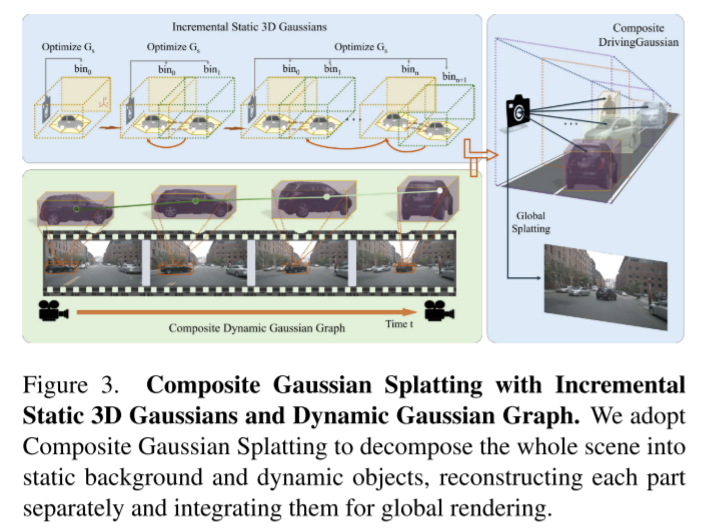
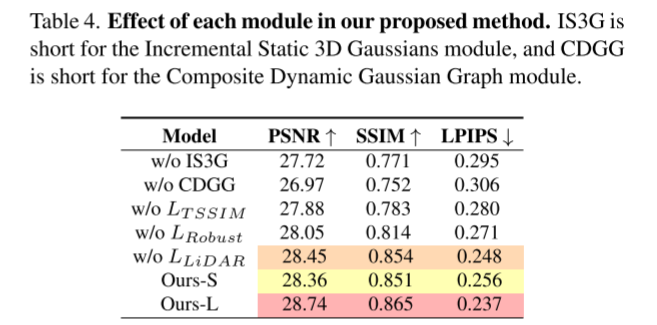
Memperkenalkan dua modul novel Gaussian dinamik dan komposit dinamik 3D. Plot Gaussian. Yang pertama membina semula latar belakang statik secara berperingkat, manakala yang terakhir memodelkan berbilang objek dinamik menggunakan peta Gaussian. Dibantu oleh lidar priors, kaedah ini membantu memulihkan geometri lengkap dalam senario pemanduan berskala besar
Eksperimen komprehensif menunjukkan bahawa DrivingGaussian mengatasi kaedah sebelumnya dalam mencabar tanda aras pemanduan autonomi dan mampu Mensimulasikan pelbagai situasi ekstrem untuk tugas hiliran
Reka Bentuk Rangkaian
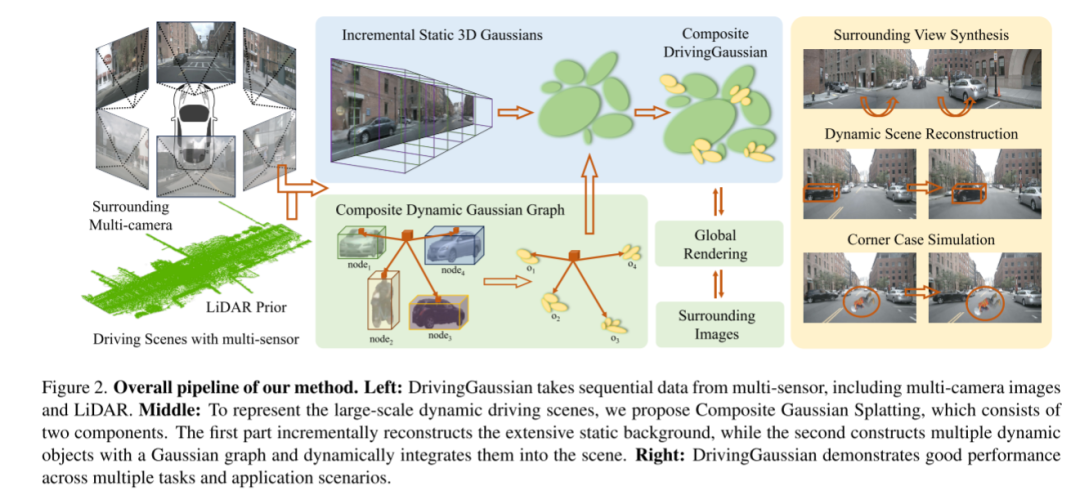
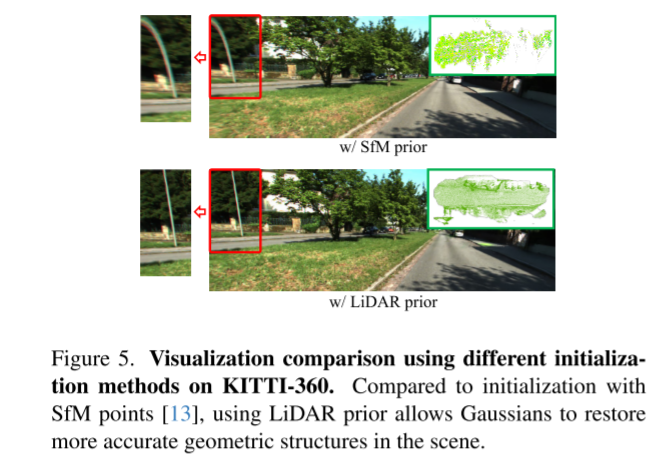
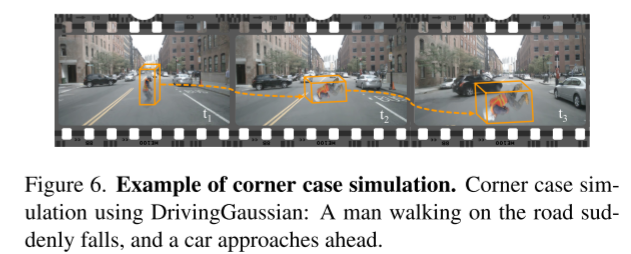
Kertas kerja ini memperkenalkan rangka kerja baharu yang dipanggil DrivingGaussian untuk mewakili senario pemanduan autonomi dinamik paparan sekeliling. Idea utama rangka kerja ini adalah untuk memodelkan senario pemanduan kompleks secara hierarki menggunakan data berurutan daripada berbilang sensor. Dengan menggunakan teknologi Composite Gaussian Splatting, keseluruhan pemandangan diuraikan menjadi latar belakang statik dan objek dinamik, dan setiap bahagian dibina semula secara berasingan. Khususnya, adegan sintetik mula-mula dibina secara berurutan daripada pandangan berbilang kamera melihat sekeliling menggunakan kaedah Gaussian 3D statik tambahan. Kemudian, peta Gaussian dinamik komposit digunakan untuk membina semula setiap objek bergerak secara individu dan menyepadukan secara dinamik ke dalam latar belakang statik melalui peta Gaussian. Atas dasar ini, pemaparan global dilakukan melalui Gaussian Splatting untuk menangkap perhubungan oklusi dalam dunia nyata, termasuk latar belakang statik dan objek dinamik. Di samping itu, kertas kerja ini juga memperkenalkan LiDAR sebelum ke dalam perwakilan GS, yang mampu memulihkan geometri yang lebih tepat dan mengekalkan konsistensi berbilang pandangan yang lebih baik berbanding awan titik yang dijana menggunakan permulaan rawak atau SfMSebilangan besar eksperimen menunjukkan bahawa , kaedah kami mencapai prestasi terkini pada set data pemanduan autonomi awam. Walaupun tanpa lidar terlebih dahulu, kaedah kami masih menunjukkan prestasi yang baik, menunjukkan fleksibilitinya dalam membina semula adegan dinamik berskala besar. Selain itu, rangka kerja artikel ini menyokong pembinaan pemandangan dinamik dan simulasi kotak sudut, yang membantu mengesahkan keselamatan dan keteguhan sistem pemanduan autonomi.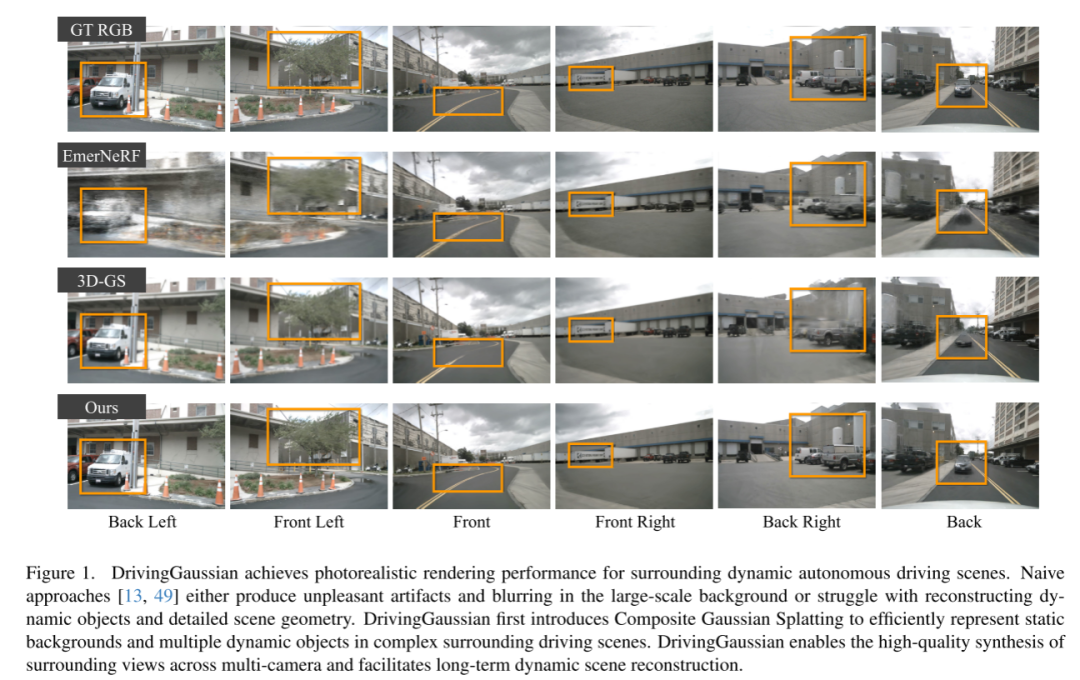
Hasil percubaan:
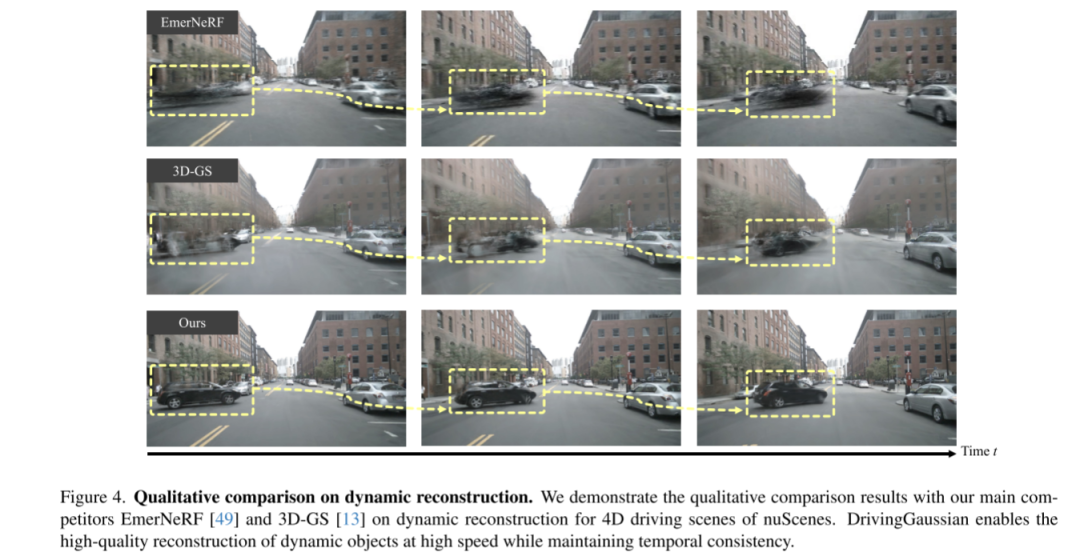
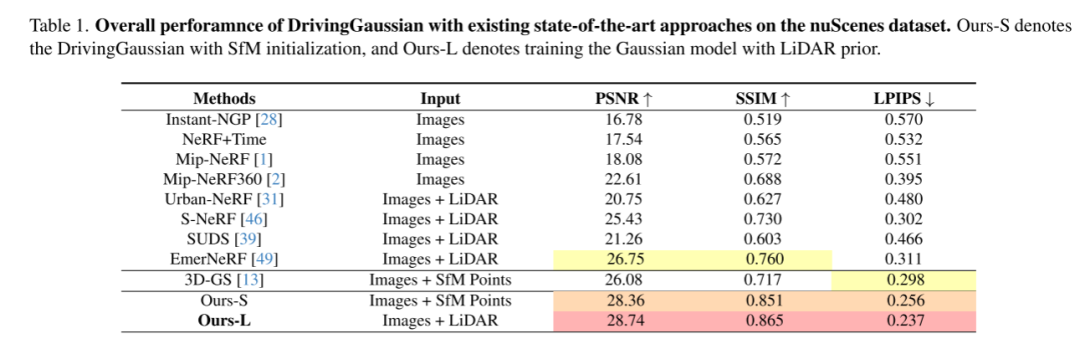
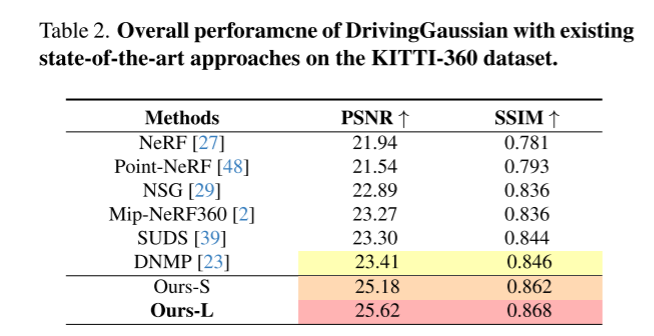

Artikel ini memperkenalkan DrivingGaussian, kaedah berdasarkan cadangan Composite Gaussian Splatting A rangka kerja baru untuk mewakili senario pemanduan autonomi dinamik berskala besar. DrivingGaussian memodelkan latar belakang statik secara progresif menggunakan Gaussian 3D statik tambahan dan menangkap berbilang objek bergerak menggunakan peta Gaussian dinamik komposit. Makalah ini selanjutnya mengeksploitasi sebelum LiDAR untuk mencapai geometri yang tepat dan konsistensi berbilang paparan. DrivingGaussian mencapai prestasi terkini pada dua set data pemanduan autonomi, membolehkan sintesis pandangan sekeliling berkualiti tinggi dan pembinaan semula pemandangan dinamik
🎜🎜Petikan: 🎜🎜🎜Zhou, X., Lin, Z., Shan, X. , Wang, Y., Sun, D., & Yang, M. (2023 DrivingGaussian: Percikan Gaussian Komposit untuk Pemandangan Pemanduan Dinamik ArXiv di sekelilingnya /abs/2312.07920🎜🎜🎜🎜l🎜:🎜🎜. www.php.cn/link/a878dbebc902328b41dbf02aa87abb58🎜🎜Atas ialah kandungan terperinci Simulasi pemanduan lanjutan: Pembinaan semula pemandangan memandu dengan data sekeliling yang realistik. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

AI Hentai Generator
Menjana ai hentai secara percuma.

Artikel Panas
Alat panas

Notepad++7.3.1
Editor kod yang mudah digunakan dan percuma

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

Hantar Studio 13.0.1
Persekitaran pembangunan bersepadu PHP yang berkuasa

Dreamweaver CS6
Alat pembangunan web visual

SublimeText3 versi Mac
Perisian penyuntingan kod peringkat Tuhan (SublimeText3)
Topik panas
 1376
1376
 52
52

 Gunakan ddrescue untuk memulihkan data pada Linux
Mar 20, 2024 pm 01:37 PM
Gunakan ddrescue untuk memulihkan data pada Linux
Mar 20, 2024 pm 01:37 PM
DDREASE ialah alat untuk memulihkan data daripada fail atau peranti sekat seperti cakera keras, SSD, cakera RAM, CD, DVD dan peranti storan USB. Ia menyalin data dari satu peranti blok ke peranti lain, meninggalkan blok data yang rosak dan hanya memindahkan blok data yang baik. ddreasue ialah alat pemulihan yang berkuasa yang automatik sepenuhnya kerana ia tidak memerlukan sebarang gangguan semasa operasi pemulihan. Selain itu, terima kasih kepada fail peta ddasue, ia boleh dihentikan dan disambung semula pada bila-bila masa. Ciri-ciri utama lain DDREASE adalah seperti berikut: Ia tidak menimpa data yang dipulihkan tetapi mengisi jurang sekiranya pemulihan berulang. Walau bagaimanapun, ia boleh dipotong jika alat itu diarahkan untuk melakukannya secara eksplisit. Pulihkan data daripada berbilang fail atau blok kepada satu
 Sumber terbuka! Di luar ZoeDepth! DepthFM: Anggaran kedalaman monokular yang cepat dan tepat!
Apr 03, 2024 pm 12:04 PM
Sumber terbuka! Di luar ZoeDepth! DepthFM: Anggaran kedalaman monokular yang cepat dan tepat!
Apr 03, 2024 pm 12:04 PM
0. Apakah fungsi artikel ini? Kami mencadangkan DepthFM: model anggaran kedalaman monokular generatif yang serba boleh dan pantas. Sebagai tambahan kepada tugas anggaran kedalaman tradisional, DepthFM juga menunjukkan keupayaan terkini dalam tugas hiliran seperti mengecat kedalaman. DepthFM cekap dan boleh mensintesis peta kedalaman dalam beberapa langkah inferens. Mari kita baca karya ini bersama-sama ~ 1. Tajuk maklumat kertas: DepthFM: FastMonocularDepthEstimationwithFlowMatching Pengarang: MingGui, JohannesS.Fischer, UlrichPrestel, PingchuanMa, Dmytr
 Bagaimana untuk menyelesaikan masalah ekor panjang dalam senario pemanduan autonomi?
Jun 02, 2024 pm 02:44 PM
Bagaimana untuk menyelesaikan masalah ekor panjang dalam senario pemanduan autonomi?
Jun 02, 2024 pm 02:44 PM
Semalam semasa temu bual, saya telah ditanya sama ada saya telah membuat sebarang soalan berkaitan ekor panjang, jadi saya fikir saya akan memberikan ringkasan ringkas. Masalah ekor panjang pemanduan autonomi merujuk kepada kes tepi dalam kenderaan autonomi, iaitu, kemungkinan senario dengan kebarangkalian yang rendah untuk berlaku. Masalah ekor panjang yang dirasakan adalah salah satu sebab utama yang kini mengehadkan domain reka bentuk pengendalian kenderaan autonomi pintar satu kenderaan. Seni bina asas dan kebanyakan isu teknikal pemanduan autonomi telah diselesaikan, dan baki 5% masalah ekor panjang secara beransur-ansur menjadi kunci untuk menyekat pembangunan pemanduan autonomi. Masalah ini termasuk pelbagai senario yang berpecah-belah, situasi yang melampau dan tingkah laku manusia yang tidak dapat diramalkan. "Ekor panjang" senario tepi dalam pemanduan autonomi merujuk kepada kes tepi dalam kenderaan autonomi (AVs) kes Edge adalah senario yang mungkin dengan kebarangkalian yang rendah untuk berlaku. kejadian yang jarang berlaku ini
 Google gembira: prestasi JAX mengatasi Pytorch dan TensorFlow! Ia mungkin menjadi pilihan terpantas untuk latihan inferens GPU
Apr 01, 2024 pm 07:46 PM
Google gembira: prestasi JAX mengatasi Pytorch dan TensorFlow! Ia mungkin menjadi pilihan terpantas untuk latihan inferens GPU
Apr 01, 2024 pm 07:46 PM
Prestasi JAX, yang dipromosikan oleh Google, telah mengatasi Pytorch dan TensorFlow dalam ujian penanda aras baru-baru ini, menduduki tempat pertama dalam 7 penunjuk. Dan ujian tidak dilakukan pada TPU dengan prestasi JAX terbaik. Walaupun dalam kalangan pembangun, Pytorch masih lebih popular daripada Tensorflow. Tetapi pada masa hadapan, mungkin lebih banyak model besar akan dilatih dan dijalankan berdasarkan platform JAX. Model Baru-baru ini, pasukan Keras menanda aras tiga hujung belakang (TensorFlow, JAX, PyTorch) dengan pelaksanaan PyTorch asli dan Keras2 dengan TensorFlow. Pertama, mereka memilih satu set arus perdana
 Kelajuan Internet Data Selular Perlahan pada iPhone: Pembetulan
May 03, 2024 pm 09:01 PM
Kelajuan Internet Data Selular Perlahan pada iPhone: Pembetulan
May 03, 2024 pm 09:01 PM
Menghadapi ketinggalan, sambungan data mudah alih perlahan pada iPhone? Biasanya, kekuatan internet selular pada telefon anda bergantung pada beberapa faktor seperti rantau, jenis rangkaian selular, jenis perayauan, dsb. Terdapat beberapa perkara yang boleh anda lakukan untuk mendapatkan sambungan Internet selular yang lebih pantas dan boleh dipercayai. Betulkan 1 – Paksa Mulakan Semula iPhone Kadangkala, paksa memulakan semula peranti anda hanya menetapkan semula banyak perkara, termasuk sambungan selular. Langkah 1 – Hanya tekan kekunci naikkan kelantangan sekali dan lepaskan. Seterusnya, tekan kekunci Turun Kelantangan dan lepaskannya semula. Langkah 2 - Bahagian seterusnya proses adalah untuk menahan butang di sebelah kanan. Biarkan iPhone selesai dimulakan semula. Dayakan data selular dan semak kelajuan rangkaian. Semak semula Betulkan 2 – Tukar mod data Walaupun 5G menawarkan kelajuan rangkaian yang lebih baik, ia berfungsi lebih baik apabila isyarat lemah
 Daya hidup kecerdasan super membangkitkan! Tetapi dengan kedatangan AI yang mengemas kini sendiri, ibu tidak perlu lagi bimbang tentang kesesakan data
Apr 29, 2024 pm 06:55 PM
Daya hidup kecerdasan super membangkitkan! Tetapi dengan kedatangan AI yang mengemas kini sendiri, ibu tidak perlu lagi bimbang tentang kesesakan data
Apr 29, 2024 pm 06:55 PM
Saya menangis hingga mati. Dunia sedang membina model besar. Data di Internet tidak mencukupi. Model latihan kelihatan seperti "The Hunger Games", dan penyelidik AI di seluruh dunia bimbang tentang cara memberi makan data ini kepada pemakan yang rakus. Masalah ini amat ketara dalam tugas berbilang modal. Pada masa mereka mengalami kerugian, pasukan pemula dari Jabatan Universiti Renmin China menggunakan model baharu mereka sendiri untuk menjadi yang pertama di China untuk menjadikan "suapan data yang dijana model itu sendiri" menjadi kenyataan. Selain itu, ia merupakan pendekatan serampang dua mata dari segi pemahaman dan sisi penjanaan Kedua-dua pihak boleh menjana data baharu berbilang modal yang berkualiti tinggi dan memberikan maklum balas data kepada model itu sendiri. Apakah model? Awaker 1.0, model berbilang modal besar yang baru sahaja muncul di Forum Zhongguancun. Siapa pasukan itu? Enjin Sophon. Diasaskan oleh Gao Yizhao, pelajar kedoktoran di Sekolah Kecerdasan Buatan Hillhouse Universiti Renmin.
 Tentera Udara A.S. mempamerkan jet pejuang AI pertamanya dengan profil tinggi! Menteri secara peribadi menjalankan pandu uji tanpa campur tangan semasa keseluruhan proses, dan 100,000 baris kod telah diuji selama 21 kali.
May 07, 2024 pm 05:00 PM
Tentera Udara A.S. mempamerkan jet pejuang AI pertamanya dengan profil tinggi! Menteri secara peribadi menjalankan pandu uji tanpa campur tangan semasa keseluruhan proses, dan 100,000 baris kod telah diuji selama 21 kali.
May 07, 2024 pm 05:00 PM
Baru-baru ini, bulatan tentera telah terharu dengan berita: jet pejuang tentera AS kini boleh melengkapkan pertempuran udara automatik sepenuhnya menggunakan AI. Ya, baru-baru ini, jet pejuang AI tentera AS telah didedahkan buat pertama kali, mendedahkan misterinya. Nama penuh pesawat pejuang ini ialah Variable Stability Simulator Test Aircraft (VISTA). Ia diterbangkan sendiri oleh Setiausaha Tentera Udara AS untuk mensimulasikan pertempuran udara satu lawan satu. Pada 2 Mei, Setiausaha Tentera Udara A.S. Frank Kendall berlepas menggunakan X-62AVISTA di Pangkalan Tentera Udara Edwards Ambil perhatian bahawa semasa penerbangan selama satu jam, semua tindakan penerbangan telah diselesaikan secara autonomi oleh AI! Kendall berkata - "Sejak beberapa dekad yang lalu, kami telah memikirkan tentang potensi tanpa had pertempuran udara-ke-udara autonomi, tetapi ia sentiasa kelihatan di luar jangkauan." Namun kini,
 SOTA terbaharu nuScenes |. SparseAD: Pertanyaan jarang membantu pemanduan autonomi hujung ke hujung yang cekap!
Apr 17, 2024 pm 06:22 PM
SOTA terbaharu nuScenes |. SparseAD: Pertanyaan jarang membantu pemanduan autonomi hujung ke hujung yang cekap!
Apr 17, 2024 pm 06:22 PM
Ditulis di hadapan & titik permulaan Paradigma hujung ke hujung menggunakan rangka kerja bersatu untuk mencapai pelbagai tugas dalam sistem pemanduan autonomi. Walaupun kesederhanaan dan kejelasan paradigma ini, prestasi kaedah pemanduan autonomi hujung ke hujung pada subtugas masih jauh ketinggalan berbanding kaedah tugasan tunggal. Pada masa yang sama, ciri pandangan mata burung (BEV) padat yang digunakan secara meluas dalam kaedah hujung ke hujung sebelum ini menyukarkan untuk membuat skala kepada lebih banyak modaliti atau tugasan. Paradigma pemanduan autonomi hujung ke hujung (SparseAD) tertumpu carian jarang dicadangkan di sini, di mana carian jarang mewakili sepenuhnya keseluruhan senario pemanduan, termasuk ruang, masa dan tugas, tanpa sebarang perwakilan BEV yang padat. Khususnya, seni bina jarang bersatu direka bentuk untuk kesedaran tugas termasuk pengesanan, penjejakan dan pemetaan dalam talian. Di samping itu, berat
