
 Peranti teknologi
AI
Perenderan masa nyata: pemodelan pemandangan bandar dinamik berdasarkan Street Gaussians
Peranti teknologi
AI
Perenderan masa nyata: pemodelan pemandangan bandar dinamik berdasarkan Street Gaussians
Perenderan masa nyata: pemodelan pemandangan bandar dinamik berdasarkan Street Gaussians

Sejujurnya, kelajuan kemas kini teknologi sememangnya sangat pantas, yang juga menyebabkan beberapa kaedah lama dalam akademik digantikan dengan kaedah baru secara beransur-ansur. Baru-baru ini, pasukan penyelidik dari Universiti Zhejiang mencadangkan kaedah baharu yang dipanggil Gaussians, yang telah menarik perhatian meluas. Kaedah ini mempunyai kelebihan unik dalam menyelesaikan masalah dan telah berjaya digunakan dalam kerja. Walaupun Nerf secara beransur-ansur kehilangan pengaruh dalam akademia
Untuk membantu pemain yang belum melepasi tahap, mari kita lihat kaedah khusus untuk menyelesaikan teka-teki dalam permainan.
Untuk membantu pemain yang belum melepasi tahap, kami boleh mempelajari kaedah khusus untuk menyelesaikan teka-teki bersama-sama. Untuk melakukan ini, saya menemui kertas mengenai penyelesaian teka-teki, pautannya ada di sini: https://arxiv.org/pdf/2401.01339.pdf. Anda boleh mengetahui lebih lanjut tentang teknik penyelesaian teka-teki dengan membaca kertas ini. Semoga ini membantu pemain!
Kertas ini bertujuan untuk menyelesaikan masalah pemodelan pemandangan jalanan bandar yang dinamik daripada video monokular. Kaedah terkini telah memperluaskan NeRF untuk memasukkan pose kenderaan yang dijejaki ke dalam kenderaan bernyawa, membolehkan sintesis paparan fotorealistik bagi pemandangan jalanan bandar yang dinamik. Walau bagaimanapun, batasan ketara mereka adalah latihan perlahan dan kelajuan rendering, ditambah pula dengan keperluan mendesak untuk ketepatan tinggi dalam menjejak pose kenderaan. Makalah ini memperkenalkan Street Gaussians, perwakilan adegan eksplisit baharu yang menangani semua batasan ini. Khususnya, jalan bandar dinamik diwakili sebagai satu set awan titik yang dilengkapi dengan logit semantik dan Gaussians 3D, masing-masing dikaitkan dengan kenderaan latar depan atau latar belakang.
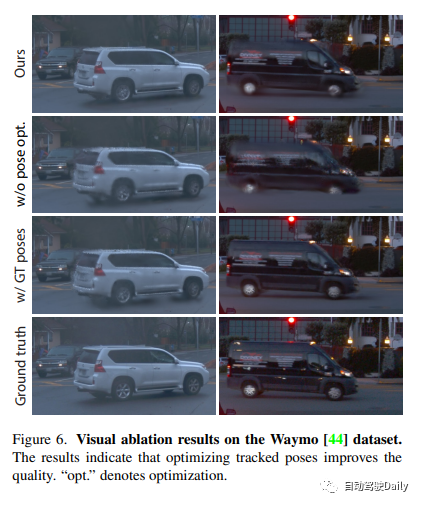
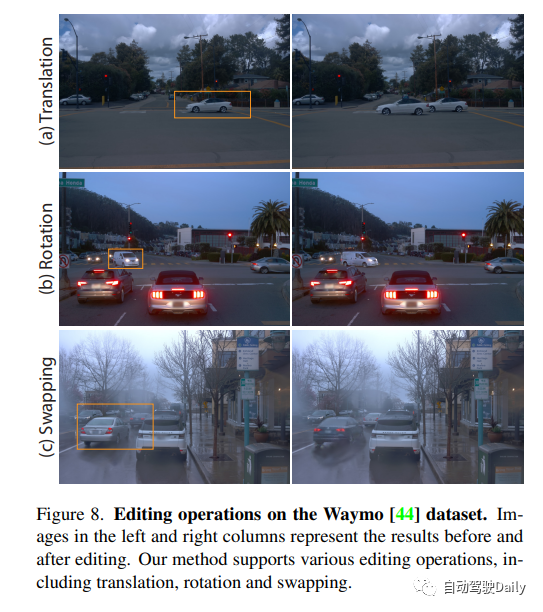
Untuk memodelkan dinamik kenderaan objek latar depan, setiap awan titik objek boleh dioptimumkan menggunakan pose penjejakan yang boleh dioptimumkan serta model harmonik sfera dinamik penampilan dinamik. Perwakilan eksplisit ini membolehkan sintesis mudah kenderaan dan latar belakang sasaran, serta operasi pengeditan pemandangan dan pemaparan pada 133 FPS (resolusi 1066×1600) dalam masa setengah jam latihan. Para penyelidik menilai pendekatan ini pada beberapa penanda aras yang mencabar, termasuk set data KITTI dan Waymo Open.
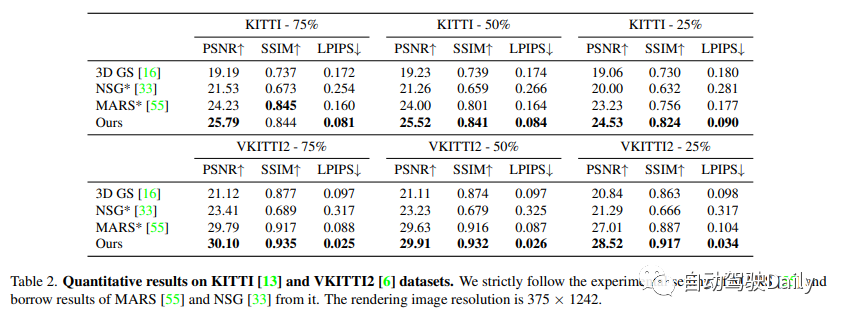
Hasil eksperimen menunjukkan bahawa kaedah cadangan kami secara konsisten mengatasi teknik sedia ada pada semua set data. Walaupun kami hanya bergantung pada maklumat pose daripada penjejak di luar rak, perwakilan kami memberikan prestasi yang setanding dengan yang dicapai menggunakan maklumat pose sebenar.
Untuk membantu pemain yang belum melepasi tahap itu, saya menyediakan pautan kepada anda: https://zju3dv.github.io/streetgaussians/, di mana anda boleh mencari kaedah penyelesaian teka-teki yang khusus. Boleh klik link untuk rujukan, semoga dapat membantu anda.
Pengenalan kepada kaedah Street Gaussians
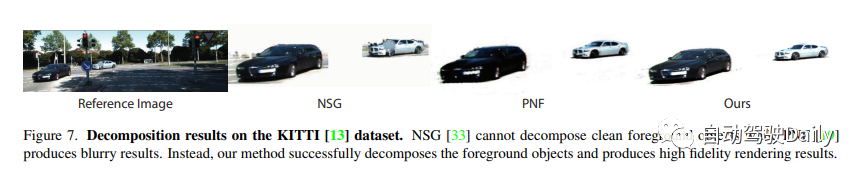
Memandangkan jujukan imej yang ditangkap daripada kenderaan bergerak dalam pemandangan jalan bandar, matlamat kertas kerja ini adalah untuk membangunkan kaedah yang boleh menjana imej fotorealistik untuk sebarang langkah masa input dan mana-mana sudut pandangan. Untuk mencapai matlamat ini, perwakilan adegan baharu, bernama Street Gaussians, dicadangkan, direka khusus untuk mewakili pemandangan jalanan yang dinamik. Seperti yang ditunjukkan dalam Rajah 2, pemandangan jalan bandar yang dinamik diwakili sebagai satu set awan titik, setiap awan titik sepadan dengan latar belakang statik atau kenderaan bergerak. Perwakilan berasaskan titik eksplisit membolehkan komposisi ringkas model individu, membolehkan pemaparan masa nyata serta penguraian objek latar depan untuk aplikasi penyuntingan. Perwakilan pemandangan yang dicadangkan boleh dilatih dengan cekap menggunakan hanya imej RGB bersama-sama dengan pose kenderaan yang dijejaki daripada penjejak di luar rak, dipertingkatkan oleh strategi pengoptimuman pose kenderaan terjejak kami.
Gambaran Keseluruhan Street Gaussians Seperti yang ditunjukkan di bawah, pemandangan jalanan bandar yang dinamik diwakili sebagai satu set latar belakang berasaskan titik dan sasaran latar depan dengan pose kenderaan jejak yang dioptimumkan. Setiap titik diberikan Gaussian 3D termasuk kedudukan, kelegapan dan kovarians yang terdiri daripada putaran dan skala untuk mewakili geometri. Untuk mewakili penampilan, setiap titik latar belakang diberikan model harmonik sfera, manakala titik latar depan dikaitkan dengan model harmonik sfera dinamik. Perwakilan berasaskan titik eksplisit membolehkan gabungan mudah model berasingan, yang membolehkan pemaparan masa nyata imej berkualiti tinggi dan peta semantik (pilihan jika maklumat semantik 2D disediakan semasa latihan), serta penguraian objek latar depan untuk menyunting Aplikasi

Perbandingan Keputusan Eksperimen
Kami menjalankan eksperimen pada set data terbuka Waymo dan penanda aras KITTI. Pada set data terbuka Waymo, 6 jujukan rakaman telah dipilih, yang mengandungi sejumlah besar objek bergerak, gerakan ego yang ketara dan keadaan pencahayaan yang kompleks. Panjang semua jujukan adalah lebih kurang 100 bingkai, dan setiap 10 imej dalam jujukan dipilih sebagai bingkai ujian dan imej yang selebihnya digunakan untuk latihan. Apabila didapati bahawa kaedah garis dasar kami mempunyai kos memori yang tinggi apabila berlatih dengan imej resolusi tinggi, imej input telah dikecilkan kepada 1066×1600. Pada KITTI dan Vitural KITTI 2, tetapan MARS diikuti dan dinilai menggunakan tetapan pembahagian kereta api/ujian yang berbeza. Gunakan kotak sempadan yang dijana oleh pengesan dan penjejak pada set data Waymo dan gunakan trajektori sasaran yang disediakan secara rasmi oleh KITTI.
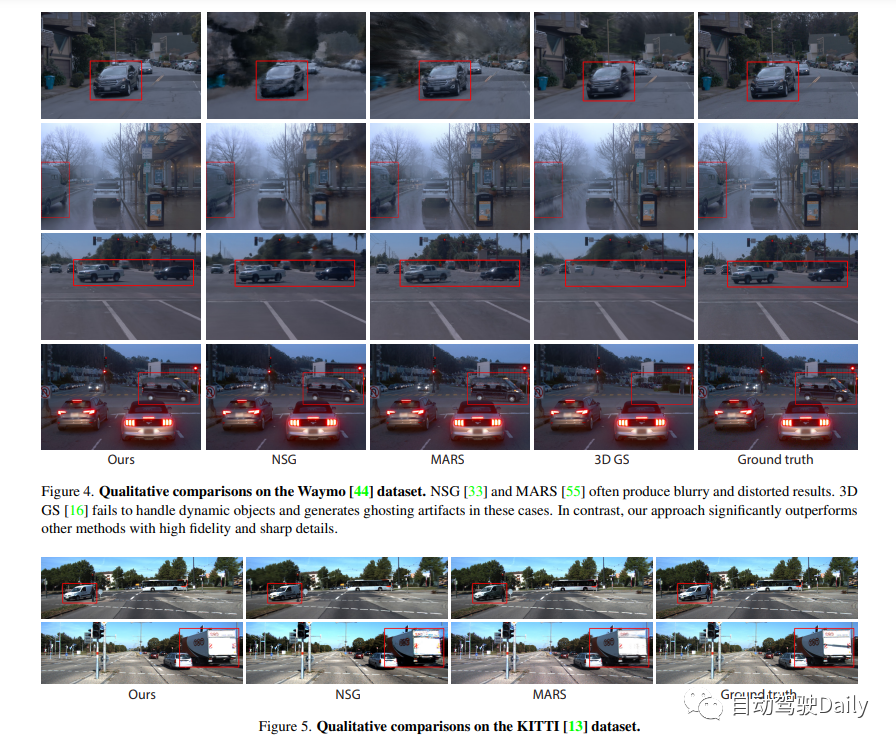
Bandingkan kaedah kami dengan tiga kaedah terkini.
(1) NSG mewakili latar belakang sebagai imej berbilang satah dan memodelkan objek bergerak menggunakan kod terpendam yang dipelajari untuk setiap objek dan penyahkod yang dikongsi.
(2) MARS membina graf pemandangan berdasarkan Nerfstudio.
(3) Gaussian 3D memodelkan pemandangan menggunakan set Gaussian anisotropik.
Kedua-dua NSG dan MARS dilatih dan dinilai menggunakan kotak GT, versi pelaksanaan yang berbeza dicuba di sini dan hasil terbaik untuk setiap jujukan dilaporkan. Kami juga menggantikan awan titik SfM dalam peta Gaussian 3D dengan input yang sama seperti kaedah kami untuk perbandingan yang saksama. Lihat maklumat tambahan untuk butiran.

Pautan asal: https://mp.weixin.qq.com/s/oikZWcxf4U47
Atas ialah kandungan terperinci Perenderan masa nyata: pemodelan pemandangan bandar dinamik berdasarkan Street Gaussians. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

AI Hentai Generator
Menjana ai hentai secara percuma.

Artikel Panas
Alat panas

Notepad++7.3.1
Editor kod yang mudah digunakan dan percuma

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

Hantar Studio 13.0.1
Persekitaran pembangunan bersepadu PHP yang berkuasa

Dreamweaver CS6
Alat pembangunan web visual

SublimeText3 versi Mac
Perisian penyuntingan kod peringkat Tuhan (SublimeText3)
Topik panas
 1379
1379
 52
52

 Bagaimana untuk menyelesaikan masalah ekor panjang dalam senario pemanduan autonomi?
Jun 02, 2024 pm 02:44 PM
Bagaimana untuk menyelesaikan masalah ekor panjang dalam senario pemanduan autonomi?
Jun 02, 2024 pm 02:44 PM
Semalam semasa temu bual, saya telah ditanya sama ada saya telah membuat sebarang soalan berkaitan ekor panjang, jadi saya fikir saya akan memberikan ringkasan ringkas. Masalah ekor panjang pemanduan autonomi merujuk kepada kes tepi dalam kenderaan autonomi, iaitu, kemungkinan senario dengan kebarangkalian yang rendah untuk berlaku. Masalah ekor panjang yang dirasakan adalah salah satu sebab utama yang kini mengehadkan domain reka bentuk pengendalian kenderaan autonomi pintar satu kenderaan. Seni bina asas dan kebanyakan isu teknikal pemanduan autonomi telah diselesaikan, dan baki 5% masalah ekor panjang secara beransur-ansur menjadi kunci untuk menyekat pembangunan pemanduan autonomi. Masalah ini termasuk pelbagai senario yang berpecah-belah, situasi yang melampau dan tingkah laku manusia yang tidak dapat diramalkan. "Ekor panjang" senario tepi dalam pemanduan autonomi merujuk kepada kes tepi dalam kenderaan autonomi (AVs) kes Edge adalah senario yang mungkin dengan kebarangkalian yang rendah untuk berlaku. kejadian yang jarang berlaku ini
 Mod siap sedia iOS 17 menukarkan iPhone yang sedang mengecas menjadi hab rumah
Jun 06, 2023 am 08:20 AM
Mod siap sedia iOS 17 menukarkan iPhone yang sedang mengecas menjadi hab rumah
Jun 06, 2023 am 08:20 AM
Dalam iOS 17 Apple memperkenalkan Mod Siap Sedia, pengalaman paparan baharu yang direka untuk mengecas iPhone dalam orientasi mendatar. Dalam kedudukan ini, iPhone dapat memaparkan satu siri widget skrin penuh, mengubahnya menjadi hab rumah yang berguna. Mod siap sedia diaktifkan secara automatik pada iPhone yang menjalankan iOS 17 yang diletakkan secara mendatar pada pengecas. Anda boleh melihat maklumat seperti masa, cuaca, kalendar, kawalan muzik, foto dan banyak lagi. Anda boleh leret ke kiri atau kanan melalui pilihan siap sedia yang tersedia dan kemudian tekan lama atau leret ke atas/bawah untuk menyesuaikan. Sebagai contoh, anda boleh memilih daripada paparan analog, paparan digital, fon gelembung dan paparan siang, di mana warna latar belakang berubah berdasarkan masa seiring dengan berlalunya masa. Terdapat beberapa pilihan
 Bagaimana untuk melaksanakan jadual boleh diedit dalam Vue
Nov 08, 2023 pm 12:51 PM
Bagaimana untuk melaksanakan jadual boleh diedit dalam Vue
Nov 08, 2023 pm 12:51 PM
Jadual adalah komponen penting dalam banyak aplikasi web. Jadual biasanya mempunyai jumlah data yang besar, jadi jadual memerlukan beberapa ciri khusus untuk meningkatkan pengalaman pengguna. Salah satu ciri penting ialah keboleheditan. Dalam artikel ini, kami akan meneroka cara melaksanakan jadual boleh diedit menggunakan Vue.js dan memberikan contoh kod khusus. Langkah 1: Sediakan data Mula-mula, kita perlu menyediakan data untuk jadual. Kita boleh menggunakan objek JSON untuk menyimpan data jadual dan menyimpannya dalam sifat data bagi contoh Vue. Dalam kes ini
 Fahami perbezaan dan perbandingan antara SpringBoot dan SpringMVC
Dec 29, 2023 am 09:20 AM
Fahami perbezaan dan perbandingan antara SpringBoot dan SpringMVC
Dec 29, 2023 am 09:20 AM
Bandingkan SpringBoot dan SpringMVC dan fahami perbezaannya Dengan pembangunan Java yang berterusan, rangka kerja Spring telah menjadi pilihan pertama bagi banyak pembangun dan perusahaan. Dalam ekosistem Spring, SpringBoot dan SpringMVC ialah dua komponen yang sangat penting. Walaupun kedua-duanya adalah berdasarkan rangka kerja Spring, terdapat beberapa perbezaan dalam fungsi dan penggunaan. Artikel ini akan menumpukan pada membandingkan SpringBoot dan Spring
 Bagaimana untuk menggunakan rangka kerja CodeIgniter4 dalam php?
May 31, 2023 pm 02:51 PM
Bagaimana untuk menggunakan rangka kerja CodeIgniter4 dalam php?
May 31, 2023 pm 02:51 PM
PHP ialah bahasa pengaturcaraan yang sangat popular, dan CodeIgniter4 ialah rangka kerja PHP yang biasa digunakan. Apabila membangunkan aplikasi web, menggunakan rangka kerja sangat membantu Ia boleh mempercepatkan proses pembangunan, meningkatkan kualiti kod dan mengurangkan kos penyelenggaraan. Artikel ini akan memperkenalkan cara menggunakan rangka kerja CodeIgniter4. Pasang rangka kerja CodeIgniter4 Rangka kerja CodeIgniter4 boleh dimuat turun dari laman web rasmi (https://codeigniter.com/). Bawah
 Pembangunan Laravel: Bagaimana untuk menjana pandangan menggunakan Laravel View?
Jun 14, 2023 pm 03:28 PM
Pembangunan Laravel: Bagaimana untuk menjana pandangan menggunakan Laravel View?
Jun 14, 2023 pm 03:28 PM
Laravel ialah salah satu rangka kerja PHP yang paling popular pada masa ini, dan keupayaan penjanaan paparan yang berkuasa sangat mengagumkan. Paparan ialah halaman atau elemen visual yang dipaparkan kepada pengguna dalam aplikasi web, yang mengandungi kod seperti HTML, CSS dan JavaScript. LaravelView membenarkan pembangun menggunakan bahasa templat berstruktur untuk membina halaman web dan menjana paparan yang sepadan melalui pengawal dan penghalaan. Dalam artikel ini, kami akan meneroka cara menjana paparan menggunakan LaravelView. 1. Apa
 Apakah pandangan dalam Word?
Mar 19, 2024 pm 06:10 PM
Apakah pandangan dalam Word?
Mar 19, 2024 pm 06:10 PM
Saya rasa ramai pelajar ingin mempelajari kemahiran menyusun kata, tetapi editor secara rahsia memberitahu anda bahawa sebelum mempelajari kemahiran menyusun huruf, anda perlu memahami pandangan perkataan dengan jelas Dalam Word2007, 5 paparan disediakan untuk dipilih oleh pengguna . Paparan, paparan reka letak membaca, paparan reka letak web, paparan garis besar dan paparan biasa, mari belajar tentang 5 paparan perkataan ini dengan editor hari ini. 1. Paparan halaman Paparan halaman boleh memaparkan rupa hasil cetakan dokumen Word2007, yang terutamanya termasuk pengepala, pengaki, objek grafik, tetapan lajur, jidar halaman dan elemen lain Ia adalah paparan halaman yang paling hampir dengan hasil cetakan. 2. Paparan susun atur membaca Paparan susun atur membaca memaparkan dokumen Word2007 dan Office dalam gaya lajur buku
 Dalam senario apakah ClassCastException berlaku di Java?
Jun 25, 2023 pm 09:19 PM
Dalam senario apakah ClassCastException berlaku di Java?
Jun 25, 2023 pm 09:19 PM
Java ialah bahasa ditaip kuat yang memerlukan padanan jenis data pada masa jalan. Disebabkan oleh mekanisme penukaran jenis Java yang ketat, jika terdapat ketidakpadanan jenis data dalam kod, ClassCastException akan berlaku. ClassCastException ialah salah satu pengecualian yang sangat biasa dalam bahasa Java Artikel ini akan memperkenalkan punca ClassCastException dan cara mengelakkannya. Apakah itu ClassCastException
