

Robot humanoid Leju 'Kuafu' lulus pengesahan keserasian OpenHarmony 3.2

Menurut akaun rasmi OpenHarmony rasmi, robot "Kuafu" Leju hari ini mengumumkan bahawa ia telah melepasi penilaian keserasian versi OpenHarmony 3.2 Release
Menurut laporan, Kuafu Robot dibangunkan bersama oleh Shenzhen Kaihong dan Leju Robot Technology Co., Ltd. ("Leju" singkatannya), dan dipanggil "sumber terbuka domestik pertama Hongmeng dengan keupayaan untuk melompat dan menyesuaikan diri dengan berjalan di atasnya. pelbagai rupa bumi" Robot humanoid"
▲ Sumber gambar laman web rasmi Leju (sama di bawah)
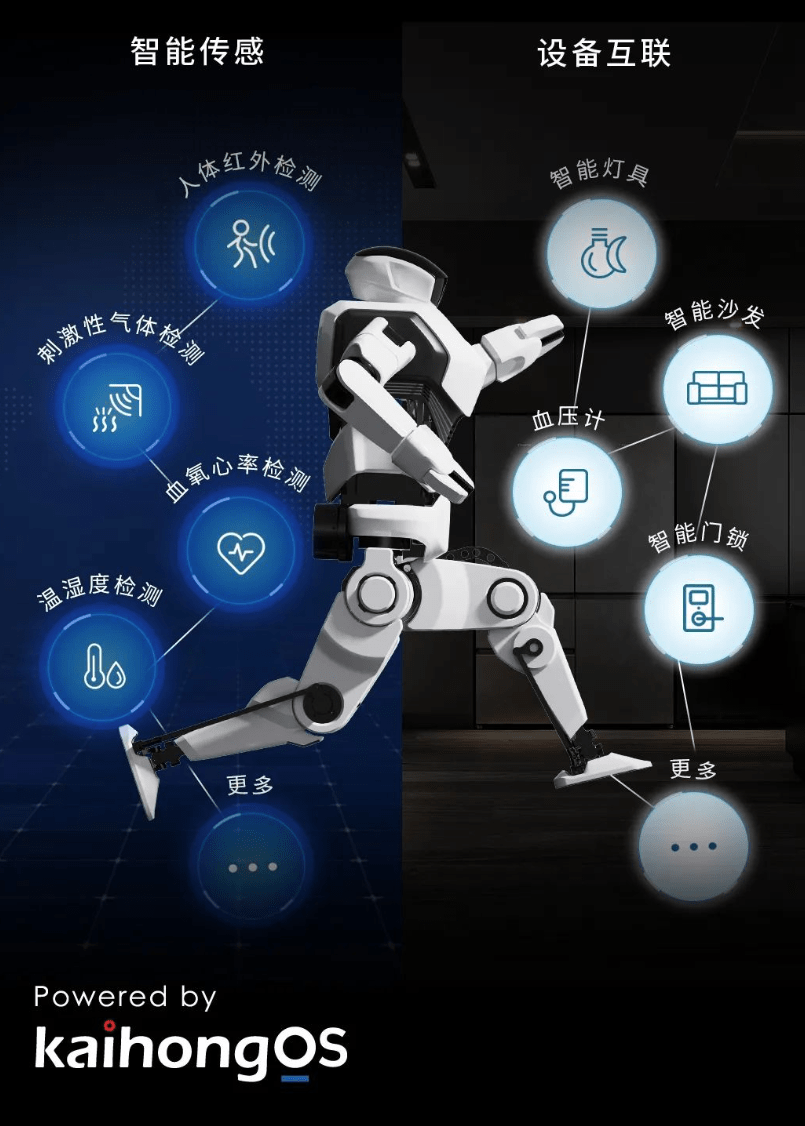
IT Home mengetahui daripada berita bahawa robot itu dilengkapi dengan sistem pengendalian KaihongOS yang dibangunkan oleh Shenzhen Kaihong berdasarkan sumber terbuka Hongmeng Ia menggunakan reka bentuk sumber terbuka tindanan penuh, dan pengawal gerakan adalah sumber terbuka sepenuhnya. Robot boleh disambungkan kepada modul seperti perancangan trajektori, kawalan maklum balas dan anggaran keadaan, dan algoritma gaitnya mendakwa dapat menyesuaikan diri dengan pelbagai rupa bumi, termasuk pasir, rumput dan halangan, serta boleh melompat sehingga 20 sentimeter
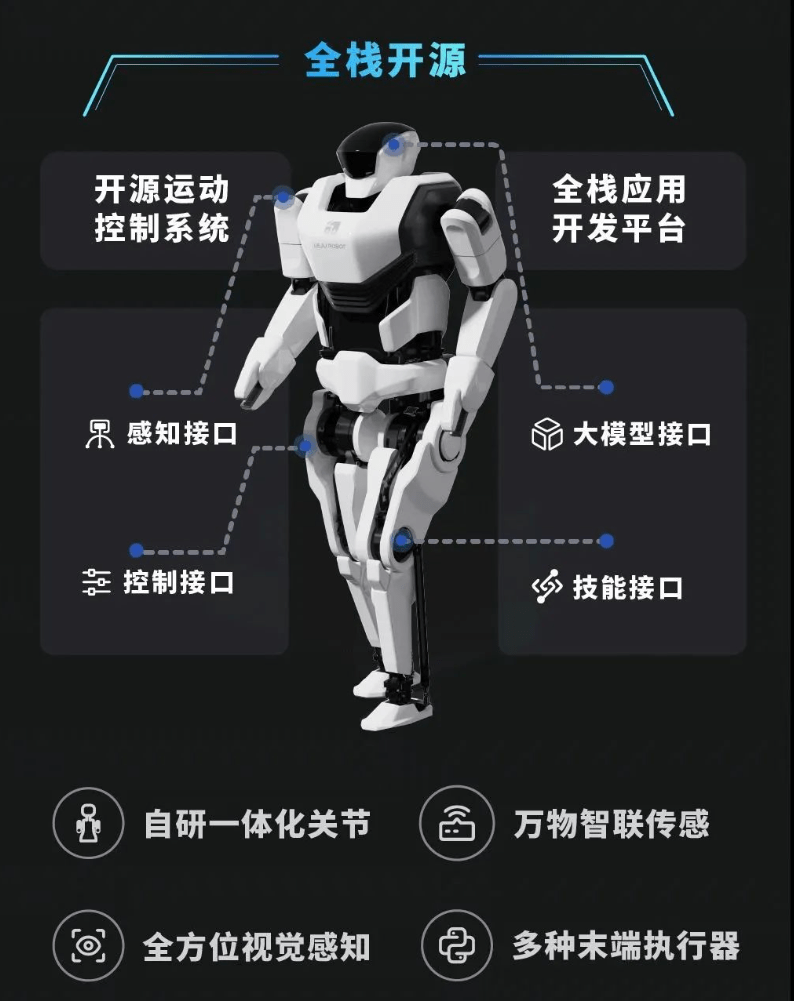
Dari segi persepsi, robot ini boleh dilengkapi dengan pelbagai sensor Kaihong dan dilengkapi dengan kamera depth. Ia juga boleh digunakan dengan pelbagai aksesori akhir untuk pembangunan sekunder, dan boleh disambungkan dengan model besar arus perdana
Atas ialah kandungan terperinci Robot humanoid Leju 'Kuafu' lulus pengesahan keserasian OpenHarmony 3.2. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

AI Hentai Generator
Menjana ai hentai secara percuma.

Artikel Panas
Alat panas

Notepad++7.3.1
Editor kod yang mudah digunakan dan percuma

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

Hantar Studio 13.0.1
Persekitaran pembangunan bersepadu PHP yang berkuasa

Dreamweaver CS6
Alat pembangunan web visual

SublimeText3 versi Mac
Perisian penyuntingan kod peringkat Tuhan (SublimeText3)
Topik panas
 1377
1377
 52
52

 Saya cuba pengekodan getaran dengan kursor AI dan ia menakjubkan!
Mar 20, 2025 pm 03:34 PM
Saya cuba pengekodan getaran dengan kursor AI dan ia menakjubkan!
Mar 20, 2025 pm 03:34 PM
Pengekodan Vibe membentuk semula dunia pembangunan perisian dengan membiarkan kami membuat aplikasi menggunakan bahasa semulajadi dan bukannya kod yang tidak berkesudahan. Diilhamkan oleh penglihatan seperti Andrej Karpathy, pendekatan inovatif ini membolehkan Dev
 Top 5 Genai dilancarkan pada Februari 2025: GPT-4.5, Grok-3 & More!
Mar 22, 2025 am 10:58 AM
Top 5 Genai dilancarkan pada Februari 2025: GPT-4.5, Grok-3 & More!
Mar 22, 2025 am 10:58 AM
Februari 2025 telah menjadi satu lagi bulan yang berubah-ubah untuk AI generatif, membawa kita beberapa peningkatan model yang paling dinanti-nantikan dan ciri-ciri baru yang hebat. Dari Xai's Grok 3 dan Anthropic's Claude 3.7 Sonnet, ke Openai's G
 Bagaimana cara menggunakan Yolo V12 untuk pengesanan objek?
Mar 22, 2025 am 11:07 AM
Bagaimana cara menggunakan Yolo V12 untuk pengesanan objek?
Mar 22, 2025 am 11:07 AM
Yolo (anda hanya melihat sekali) telah menjadi kerangka pengesanan objek masa nyata yang terkemuka, dengan setiap lelaran bertambah baik pada versi sebelumnya. Versi terbaru Yolo V12 memperkenalkan kemajuan yang meningkatkan ketepatan
 Adakah chatgpt 4 o tersedia?
Mar 28, 2025 pm 05:29 PM
Adakah chatgpt 4 o tersedia?
Mar 28, 2025 pm 05:29 PM
CHATGPT 4 kini tersedia dan digunakan secara meluas, menunjukkan penambahbaikan yang ketara dalam memahami konteks dan menjana tindak balas yang koheren berbanding dengan pendahulunya seperti ChATGPT 3.5. Perkembangan masa depan mungkin merangkumi lebih banyak Inter yang diperibadikan
 Google ' s Gencast: Peramalan Cuaca dengan Demo Mini Gencast
Mar 16, 2025 pm 01:46 PM
Google ' s Gencast: Peramalan Cuaca dengan Demo Mini Gencast
Mar 16, 2025 pm 01:46 PM
Google Deepmind's Gencast: AI Revolusioner untuk Peramalan Cuaca Peramalan cuaca telah menjalani transformasi dramatik, bergerak dari pemerhatian asas kepada ramalan berkuasa AI yang canggih. Google Deepmind's Gencast, tanah air
 AI mana yang lebih baik daripada chatgpt?
Mar 18, 2025 pm 06:05 PM
AI mana yang lebih baik daripada chatgpt?
Mar 18, 2025 pm 06:05 PM
Artikel ini membincangkan model AI yang melampaui chatgpt, seperti Lamda, Llama, dan Grok, menonjolkan kelebihan mereka dalam ketepatan, pemahaman, dan kesan industri. (159 aksara)
 Penjana Seni AI Terbaik (Percuma & amp; Dibayar) untuk projek kreatif
Apr 02, 2025 pm 06:10 PM
Penjana Seni AI Terbaik (Percuma & amp; Dibayar) untuk projek kreatif
Apr 02, 2025 pm 06:10 PM
Artikel ini mengkaji semula penjana seni AI atas, membincangkan ciri -ciri mereka, kesesuaian untuk projek kreatif, dan nilai. Ia menyerlahkan Midjourney sebagai nilai terbaik untuk profesional dan mengesyorkan Dall-E 2 untuk seni berkualiti tinggi dan disesuaikan.
 O1 vs GPT-4O: Adakah model baru OpenAI ' lebih baik daripada GPT-4O?
Mar 16, 2025 am 11:47 AM
O1 vs GPT-4O: Adakah model baru OpenAI ' lebih baik daripada GPT-4O?
Mar 16, 2025 am 11:47 AM
Openai's O1: Hadiah 12 Hari Bermula dengan model mereka yang paling berkuasa Ketibaan Disember membawa kelembapan global, kepingan salji di beberapa bahagian dunia, tetapi Openai baru sahaja bermula. Sam Altman dan pasukannya melancarkan mantan hadiah 12 hari
