

Apollo bekerjasama dengan Carsim/TruckSim untuk simulasi bersama

1. Latar belakang
Simulasi memainkan peranan penting dalam penyelidikan dan pembangunan pemanduan autonomi Ia boleh meningkatkan kecekapan penyelidikan dan pembangunan serta memberikan jaminan untuk kebolehpercayaan algoritma. Sebagai platform sumber terbuka yang sangat baik, sistem Baidu Apollo sangat sesuai untuk penyelidikan oleh rakan-rakan yang berminat untuk mempelajari pemanduan autonomi. Selain itu, Carsim/Trucksim ialah alat simulasi dinamik kenderaan klasik yang sangat dihormati.
Artikel ini memperkenalkan kaedah merealisasikan simulasi masa nyata tempatan melalui gabungan Apollo dan Trucksim. Ia sesuai untuk pemula untuk membina platform simulasi dan mengkaji sistem Apollo.
2. Reka bentuk seni bina
Kod teras projek Apollo dilaksanakan dalam C++. Antara muka biasa untuk Trucksim termasuk simulink, Python dan bahasa C. Artikel ini mula-mula akan memperkenalkan seni bina Apollo, simulink dan simulasi bersama Trucksim, dan membincangkan masalah yang wujud dalam sistem simulasi ini. Seterusnya, kami akan memberi tumpuan kepada simulasi bersama Apollo dan Trucksim.
2.1 Penyelesaian Apollo, simulink dan Trucksim
Simulink dan Apollo boleh berkomunikasi melalui ROS. Memandangkan format data mesej Apollo ialah protobuf, dan alat ROS Simulink hanya menyokong mesej ROS standard (mesej ROS), satu nod penukaran format boleh ditambahkan pada Apollo untuk mencapai keserasian. Mengenai penyelesaian Simulink memanggil Trucksim, terdapat banyak sumber di Internet untuk rujukan, jadi saya tidak akan menjelaskan secara terperinci.
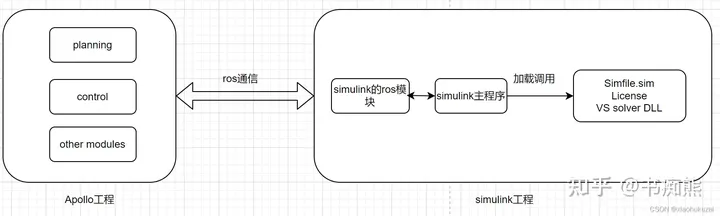
rajah penyelesaian simulink
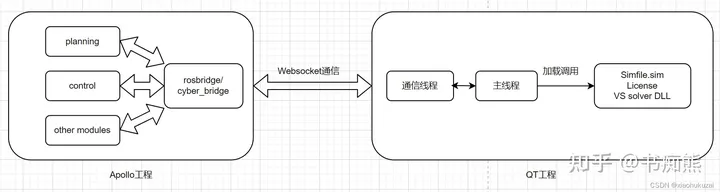
2.2 Penyelesaian Apollo, rosbridge dan Trucksim
Wujudkan komunikasi websoket antara projek QT dan projek Apollo. Dalam projek Apollo, penukaran bersama antara mesej ros (atau mesej siber) dan soket web direalisasikan dengan menambah modul rosbridge (atau cyber_bridge). Projek QT dilaksanakan dalam C++ sebagai pelanggan websocket dan memanggil perpustakaan dinamik Trucksim untuk merealisasikan fungsi menjalankan Trucksim dalam masa nyata. Rajah penyelesaian rosbridge alamat ditunjukkan dalam Rajah 2. Nama hos/Alamat IP dan Port ialah alamat dan nombor port ROS_MASTER_URI masing-masing, yang dijelaskan dalam mekanisme komunikasi di atas.
Konfigurasikan alamat rangkaian ROS
Pelanggan ROS menerima mesej daripada antara muka, jadi Topik, jenis Mesej dan masa Contoh mesti sepadan dengan program dalam antara muka.
Konfigurasikan ros subcribeUntuk memudahkan penyahpepijatan dan pengesahan, sekarang mulakan ROS di sebelah MATLAB. Proses konfigurasi adalah seperti berikut:
Arahan tetapan MATLAB:>> setenv('ROS_MASTER_URI','http://192.168.103.122:11311')>> setenv('ROS_IP','192.168.103.198')>> rosinit('192.168.103.122')3.1.2 Konfigurasi TruckSim 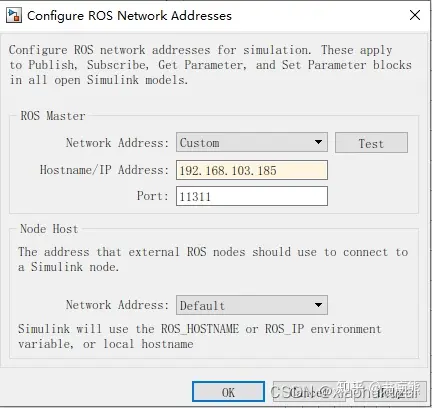
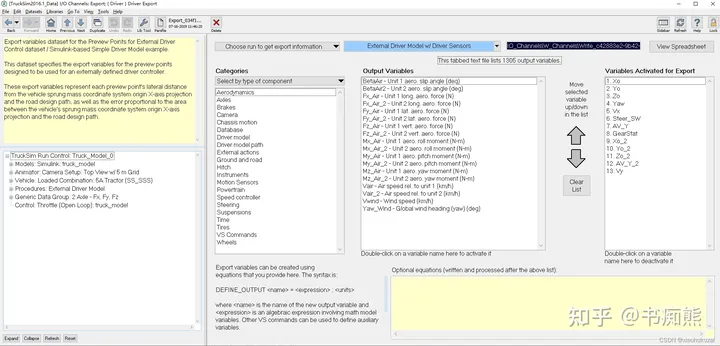
Trucksim ialah pengaturcaraan trak berasaskan wizard, konfigurasi SSS pilih antara muka , lihat parameter khusus Rajah 3. Antara muka kawalan: Pilih simulink untuk Model. antara muka konfigurasi parameter input 
pemasangan rosbridge dalam talian Terdapat banyak tutorial, jadi saya tidak akan menjelaskan secara terperinci dalam artikel ini.
Penggunaan adalah seperti berikut:
cd ros_pkgs_ws
catkin_makeMulakan rosbridge
sumber /apollo/ros_pkgs_ws/devel/setup.bash=rcoPAT
rosla unch rosbridge_server rosbridge_websocket .launch3.2.1 Arahan konfigurasi projek Qt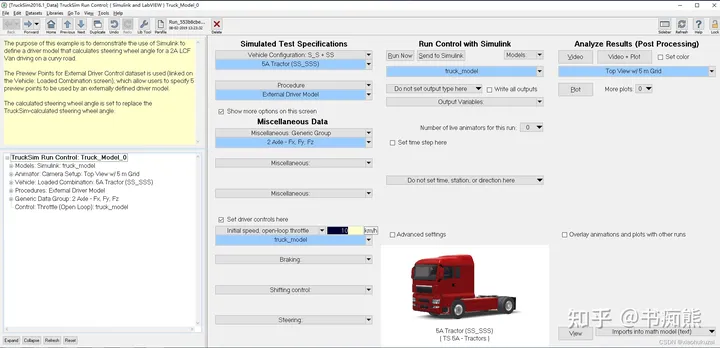
3.2.1.1 Maklumat versi Qt dan CMake
3.2.1.3 takrifan projek dan Antaramuka Qt
Apollo /apollo/trucksim /pose 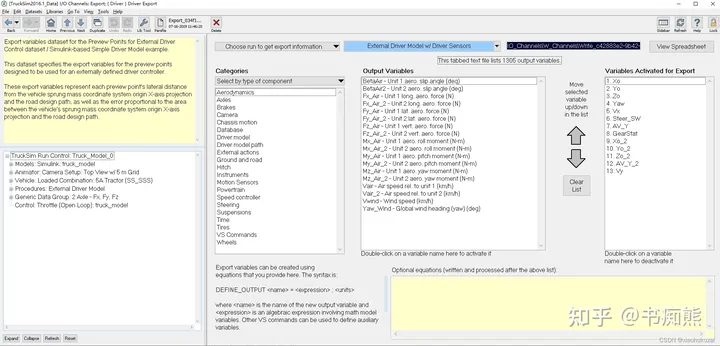
{"op":"publish","topic":"/apollo/tucksim/pose","msg": {"header": {"timestamp_sec":1572253610.76292, "sequence_num":77}, "trucksimpose": {"XCG_TM":30.9964522249, // 单位:m "YCG_TM":0.657853758823, // 单位:m "ZCG_TM":1.00644079555, // 单位:m "YAW":-0.015505948987, // 单位:rad "VX":7.81497285565, // 单位:m/s "STEER_SW":2.84450684087, // 单位:rad "AV_Y":0.133153549217, // 单位:rad/s "GEARSTAT":5.0, // 无单位 "XCG_TM2":22.5890979801, // 单位:m "YCG_TM2":-0.471483304991, // 单位:m "ZCG_TM2":2.08466406388, // 单位:m "YAW_2":-0.0253130178796, // 单位:rad "VY":0.326368169782, // 单位:m/s "DISTANCE":31.0034324244, // 单位:m "DELTA_YAW":-0.015505948987, // 单位:rad "DISTANCE_2":22.5940178822, // 单位:m "DELTA_YAW_2":-0.0253130178796 // 单位:rad/s } }}4. 使用心得
- TruckSim模型离散时间补偿设置为0.001s,即模型更新频率为1000hz,选择每个步长更新两次的积分方法(如:AM-2, RK-2等)。
注释:
1)真车是一个高阶非线性连续系统,TruckSim通过固定时间步长离散系统来模拟真车,当模型步长选择较大时(如之前设置的0.01s),模型较不准;TruckSim模型是由悬架系统-动力系统-转向系统-制动系统-轮胎模型-空气动力学等系统构成的复杂系统,当其中一个或多个系统因为时间步长太大而很不准时,就会出现车抖动比较明显的现象。
2)模型更新频率设为1000hz是TruckSim官网推荐的,经验证,这个频率能解决车抖动问题。
- 接口线程加载频率用定时器控制,加载调用simfile.sim,license和DLL的频率设置为1000hz,与Trucksim模型离散步长一致。
注释:
受3中积分方法决定,当选择每个步长更新两次的积分方法,VS_EXT_EQ_IN和VS_EXT_EQ_OUT更新频率是加载频率的2倍,为2000hz。

原文链接:https://mp.weixin.qq.com/s/8QNp5iQebE3lPJzEgq_bOA
Atas ialah kandungan terperinci Apollo bekerjasama dengan Carsim/TruckSim untuk simulasi bersama. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

Video Face Swap
Tukar muka dalam mana-mana video dengan mudah menggunakan alat tukar muka AI percuma kami!

Artikel Panas
Alat panas

Notepad++7.3.1
Editor kod yang mudah digunakan dan percuma

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

Hantar Studio 13.0.1
Persekitaran pembangunan bersepadu PHP yang berkuasa

Dreamweaver CS6
Alat pembangunan web visual

SublimeText3 versi Mac
Perisian penyuntingan kod peringkat Tuhan (SublimeText3)
Topik panas
 1392
1392
 52
52

 Mengesyorkan beberapa aplikasi untuk membeli duit syiling arus perdana pada 2025 Siaran Terkini
Apr 21, 2025 pm 11:54 PM
Mengesyorkan beberapa aplikasi untuk membeli duit syiling arus perdana pada 2025 Siaran Terkini
Apr 21, 2025 pm 11:54 PM
Perisian aplikasi yang boleh membeli duit syiling arus perdana termasuk: 1. Binance, jumlah transaksi yang besar di dunia dan kelajuan cepat; 2. Okx, produk inovatif, yuran rendah, keselamatan yang tinggi; 3. Gate.io, pelbagai aset dan pilihan perdagangan, memberi tumpuan kepada keselamatan; 4. Huobi (HTX), yuran rendah, pengalaman pengguna yang baik; 5. Coinbase, sesuai untuk orang baru, keselamatan yang tinggi; 6. Kraken, selamat dan patuh, menyediakan pelbagai perkhidmatan; 7. Kucoin, yuran rendah, sesuai untuk peniaga profesional; 8. Gemini, menekankan pematuhan, dan menyediakan perkhidmatan penjagaan; 9. Crypto.com, menyediakan pelbagai tawaran dan perkhidmatan; 10. Bitstamp, pertukaran lama, kecairan yang kuat,
 Perisian penting yang disyorkan untuk pihak kontrak mata wang
Apr 21, 2025 pm 11:21 PM
Perisian penting yang disyorkan untuk pihak kontrak mata wang
Apr 21, 2025 pm 11:21 PM
Platform Pertukaran Kontrak Cryptocurrency Top pada tahun 2025 adalah: 1. Binance Futures, 2.
 Kedudukan pertukaran leverage dalam lingkaran mata wang Cadangan terkini sepuluh pertukaran leverage dalam lingkaran mata wang
Apr 21, 2025 pm 11:24 PM
Kedudukan pertukaran leverage dalam lingkaran mata wang Cadangan terkini sepuluh pertukaran leverage dalam lingkaran mata wang
Apr 21, 2025 pm 11:24 PM
Platform yang mempunyai prestasi cemerlang dalam perdagangan, keselamatan dan pengalaman pengguna yang dimanfaatkan pada tahun 2025 adalah: 1. Okx, sesuai untuk peniaga frekuensi tinggi, menyediakan sehingga 100 kali leverage; 2. Binance, sesuai untuk peniaga berbilang mata wang di seluruh dunia, memberikan 125 kali leverage tinggi; 3. Gate.io, sesuai untuk pemain derivatif profesional, menyediakan 100 kali leverage; 4. Bitget, sesuai untuk orang baru dan peniaga sosial, menyediakan sehingga 100 kali leverage; 5. Kraken, sesuai untuk pelabur mantap, menyediakan 5 kali leverage; 6. Bybit, sesuai untuk penjelajah altcoin, menyediakan 20 kali leverage; 7. Kucoin, sesuai untuk peniaga kos rendah, menyediakan 10 kali leverage; 8. Bitfinex, sesuai untuk bermain senior
 Pertukaran niaga hadapan bitcoin mana yang global?
Apr 21, 2025 pm 11:18 PM
Pertukaran niaga hadapan bitcoin mana yang global?
Apr 21, 2025 pm 11:18 PM
Kedudukan lima niaga hadapan Bitcoin teratas adalah: 1. 2. Coinbase: Khususnya untuk pelabur runcit, menyediakan 13 kontrak niaga hadapan, dengan kemudahan penggunaan yang tinggi; 3. Binance: leverage tinggi, kecairan yang baik, dan jumlah pengguna yang besar; 4 OKX: Jumlah dagangan kumulatif yang besar, antara muka profesional, dan pengurusan risiko lengkap; 5. Kraken: Keselamatan yang tinggi, sesuai untuk pelanggan pasaran dan institusi Eropah.
 Ouyi Ouyi Ouyi Ouix Ouyi Global Station Login Page
Apr 21, 2025 pm 11:57 PM
Ouyi Ouyi Ouyi Ouix Ouyi Global Station Login Page
Apr 21, 2025 pm 11:57 PM
Ouyi Okx adalah platform perdagangan aset digital terkemuka di dunia. 1) Sejarah pembangunannya termasuk: ia akan dilancarkan pada tahun 2017, nama Cina "Ouyi" akan dilancarkan pada tahun 2021, dan ia akan dinamakan semula sebagai Ouyi Okx pada tahun 2022). 3) Fungsi khas platform termasuk: perkhidmatan data pasaran dan sistem kawalan risiko. 4) Kelebihan teras termasuk: kekuatan teknikal, sistem keselamatan, sokongan perkhidmatan dan liputan pasaran.
 Ranking Platform Perdagangan Kontrak Mata Wang 2025
Apr 21, 2025 pm 11:15 PM
Ranking Platform Perdagangan Kontrak Mata Wang 2025
Apr 21, 2025 pm 11:15 PM
Berikut adalah Top Top Cryptocurrency Futures Exchanges di Dunia: 1. Binance Futures: Menyediakan banyak produk kontrak, yuran yang rendah dan kecairan yang tinggi. 2. OKX: Menyokong pelbagai urus niaga mata wang, menggunakan penyulitan SSL dan penyimpanan dompet sejuk. 3. Huobi Hadapan: Dikenali dengan platform yang stabil dan perkhidmatan yang baik, ia menyediakan sumber pendidikan. 4. Gate.io: Produk kontrak inovatif dan kecairan yang tinggi, tetapi FTX bankrap. 5. Deribit: Fokus pada pilihan dan kontrak kekal, menyediakan alat perdagangan profesional. 6. Coinflex: Menyediakan kontrak niaga hadapan dan token tadbir tafsa flex. 7. Phemex: Sehingga 100 kali leverage, yuran urus niaga yang rendah, dan menyediakan kontrak inovatif. 8. b
 Ranking Pertukaran Rantaian Kuantum Top 10 disyorkan (dikemas kini pada tahun 2025)
Apr 21, 2025 pm 11:48 PM
Ranking Pertukaran Rantaian Kuantum Top 10 disyorkan (dikemas kini pada tahun 2025)
Apr 21, 2025 pm 11:48 PM
Rantai kuantum boleh didagangkan di bursa berikut: 1. Binance: Salah satu pertukaran terbesar di dunia, dengan jumlah perdagangan yang besar, mata wang yang kaya dan keselamatan tinggi. 2. Pintu Terbuka Sesame (Gate.io): Pertukaran yang besar, menyediakan pelbagai transaksi mata wang digital, dengan kedalaman perdagangan yang baik. 3. Ouyi (OKX): dikendalikan oleh OK Group, dengan kekuatan komprehensif yang kuat, jumlah transaksi yang besar, dan langkah keselamatan lengkap. 4. Bitget: Pembangunan pantas, menyediakan urus niaga rantaian kuantum, dan meningkatkan keselamatan. 5. Bithumb: Beroperasi di Jepun, menyokong transaksi pelbagai mata wang maya arus perdana, dan selamat dan boleh dipercayai. 6. Matcha Exchange: Pertukaran yang terkenal dengan antara muka yang mesra dan menyokong perdagangan rantaian kuantum. 7. Huobi: pertukaran besar yang menyediakan perdagangan rantai kuantum,
 Pertukaran Cryptocurrency Terbaik di Dunia pada tahun 2025: Cadangan Teratas
Apr 21, 2025 pm 10:39 PM
Pertukaran Cryptocurrency Terbaik di Dunia pada tahun 2025: Cadangan Teratas
Apr 21, 2025 pm 10:39 PM
Pertukaran cryptocurrency terbaik di dunia pada tahun 2025 adalah: 1. Binance, 2. Coinbase, 3. Okx, 4. Kraken, 5. dan liputan global, dan sesuai untuk pelabur dengan keperluan yang berbeza.
