
 Peranti teknologi
AI
Penjanaan trajektori di bawah kekangan lembut dan keras: penjelasan terperinci tentang teori dan kod
Peranti teknologi
AI
Penjanaan trajektori di bawah kekangan lembut dan keras: penjelasan terperinci tentang teori dan kod
Penjanaan trajektori di bawah kekangan lembut dan keras: penjelasan terperinci tentang teori dan kod

Kod projek ini:
github.com/liangwq/robot_motion_planing
Kekangan lembut dan keras dalam kekangan trajektori
Artikel sebelum ini telah pun memperkenalkan intipati trajektori adalah kekangan trajektori. Input ialah senarai titik laluan dan terdapat dua jenis kekangan: kekangan keras dan kekangan lembut. Apa yang dipanggil kekangan keras sepadan dengan bentuk matematik fungsi kos, dan kekangan keras sepadan dengan syarat kekangan musim luruh pengoptimuman. Sesuai dengan makna fizikal, untuk mendapatkan trajektori yang selamat untuk robot berjalan, terdapat:
- Tolak trajektori dari halangan melalui fungsi kos
- Berikan koridor badan cembung boleh berjalan di antara halangan, dan gunakan kekangan yang sukar untuk dibiarkan Trajektori robot mesti berjalan di koridor badan cembung
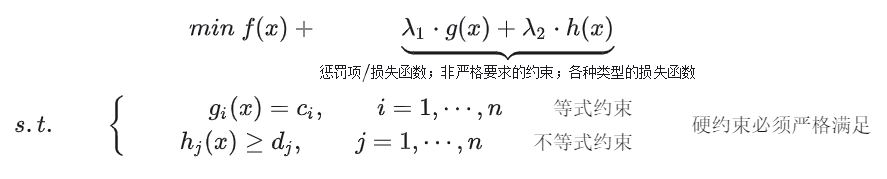
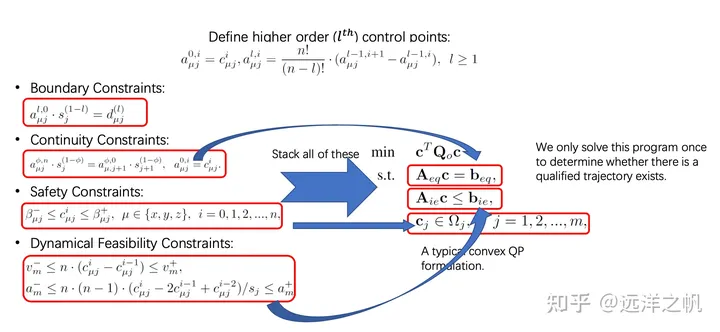
Rajah di atas menunjukkan rangka kerja matematik untuk menyelesaikan pemasangan lengkung Bezier di bawah kekangan lembut dan keras, dan cara menukar penyelesaian mathematik fungsi kos (kekangan lembut) atau kekangan yang perlu diselesaikan (kekangan lembut). image.png
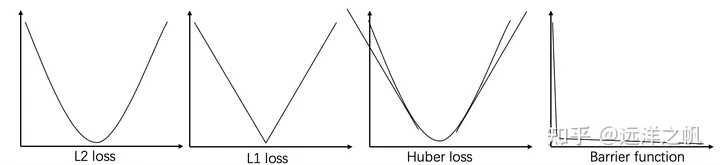
Di atas ialah contoh beberapa ungkapan kekangan fungsi kos yang biasa digunakan. image.png
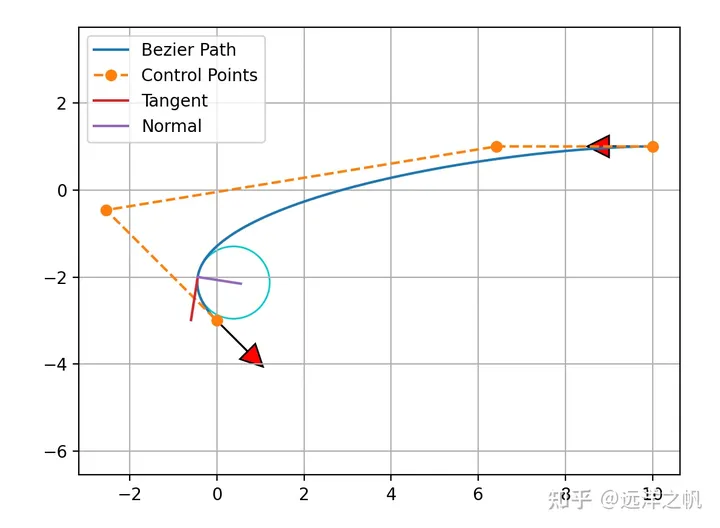
Trajektori pemasangan lengkung Bezier
Artikel sebelumnya telah memperkenalkan pelbagai kelebihan pemasangan lengkung Bezier:
- Interpolasi titik akhir. Keluk Bezier sentiasa bermula dari titik kawalan pertama, berakhir pada titik kawalan terakhir dan tidak melalui mana-mana titik kawalan lain.
- Lambung cembung. Lengkung Bezier ( ) terdiri daripada satu set titik kawalan dan dikekang sepenuhnya dalam badan cembung yang ditakrifkan oleh semua titik kawalan tersebut.
- Keluk kelajuan. Lengkung terbitan ′( ) bagi lengkung Bezier ( ) dipanggil lengkung halaju, yang juga merupakan lengkung Bezier yang ditakrifkan oleh titik kawalan, di mana titik kawalan ialah ∙ ( +1− ), di mana susunannya.
- Selang masa tetap. Keluk Bezier sentiasa ditakrifkan pada [0,1]. . bahagian lengkung, ia telah diberikan di atas Dengan ungkapan dan pelaksanaan kod tidak dapat dilaksanakan, apa yang hilang sekarang ialah titik kawalan yang diberikan dan gunakan ungkapan lengkung Bezier untuk mengira koordinat titik yang perlu dilukis pada titik akhir dan titik akhir yang diberikan. Kod berikut memberikan pelaksanaan lengkung Bezier sebanyak 4 titik kawalan dan 6 titik kawalan untuk melukis lengkung, 170 mata dalam talian perlu dikira. Kodnya adalah seperti berikut:
def bernstein_poly(n, i, t):"""Bernstein polynom.:param n: (int) polynom degree:param i: (int):param t: (float):return: (float)"""return scipy.special.comb(n, i) * t ** i * (1 - t) ** (n - i)def bezier(t, control_points):"""Return one point on the bezier curve.:param t: (float) number in [0, 1]:param control_points: (numpy array):return: (numpy array) Coordinates of the point"""n = len(control_points) - 1return np.sum([bernstein_poly(n, i, t) * control_points[i] for i in range(n + 1)], axis=0)
 Kod penjanaan lengkung Bezier berbilang adalah seperti berikut, prinsipnya adalah sangat mudah, setiap dua titik laluan bersebelahan segmen Bezizer curve, kodnya adalah seperti berikut:
Kod penjanaan lengkung Bezier berbilang adalah seperti berikut, prinsipnya adalah sangat mudah, setiap dua titik laluan bersebelahan segmen Bezizer curve, kodnya adalah seperti berikut:
def calc_4points_bezier_path(sx, sy, syaw, ex, ey, eyaw, offset):"""Compute control points and path given start and end position.:param sx: (float) x-coordinate of the starting point:param sy: (float) y-coordinate of the starting point:param syaw: (float) yaw angle at start:param ex: (float) x-coordinate of the ending point:param ey: (float) y-coordinate of the ending point:param eyaw: (float) yaw angle at the end:param offset: (float):return: (numpy array, numpy array)"""dist = np.hypot(sx - ex, sy - ey) / offsetcontrol_points = np.array([[sx, sy], [sx + dist * np.cos(syaw), sy + dist * np.sin(syaw)], [ex - dist * np.cos(eyaw), ey - dist * np.sin(eyaw)], [ex, ey]])path = calc_bezier_path(control_points, n_points=170)return path, control_pointsdef calc_6points_bezier_path(sx, sy, syaw, ex, ey, eyaw, offset):"""Compute control points and path given start and end position.:param sx: (float) x-coordinate of the starting point:param sy: (float) y-coordinate of the starting point:param syaw: (float) yaw angle at start:param ex: (float) x-coordinate of the ending point:param ey: (float) y-coordinate of the ending point:param eyaw: (float) yaw angle at the end:param offset: (float):return: (numpy array, numpy array)"""dist = np.hypot(sx - ex, sy - ey) * offsetcontrol_points = np.array([[sx, sy], [sx + 0.25 * dist * np.cos(syaw), sy + 0.25 * dist * np.sin(syaw)], [sx + 0.40 * dist * np.cos(syaw), sy + 0.40 * dist * np.sin(syaw)], [ex - 0.40 * dist * np.cos(eyaw), ey - 0.40 * dist * np.sin(eyaw)], [ex - 0.25 * dist * np.cos(eyaw), ey - 0.25 * dist * np.sin(eyaw)], [ex, ey]])path = calc_bezier_path(control_points, n_points=170)return path, control_pointsdef calc_bezier_path(control_points, n_points=100):"""Compute bezier path (trajectory) given control points.:param control_points: (numpy array):param n_points: (int) number of points in the trajectory:return: (numpy array)"""traj = []for t in np.linspace(0, 1, n_points):traj.append(bezier(t, control_points))return np.array(traj)
Pengiraan fungsi kos termasuk: kos kelengkungan + kos sisihan + kos jarak + kos kesinambungan, serta syarat sempadan, kekangan ketidaksamaan bahawa trajektori mesti berada dalam tiub, dan masalah penyelesaian pengoptimuman. Pelaksanaan kod khusus adalah seperti berikut:
# Bezier path one as per the approach suggested in# https://users.soe.ucsc.edu/~elkaim/Documents/camera_WCECS2008_IEEE_ICIAR_58.pdfdef cubic_bezier_path(self, ax, ay):dyaw, _ = self.calc_yaw_curvature(ax, ay)cx = []cy = []ayaw = dyaw.copy()for n in range(1, len(ax)-1):yaw = 0.5*(dyaw[n] + dyaw[n-1])ayaw[n] = yawlast_ax = ax[0]last_ay = ay[0]last_ayaw = ayaw[0]# for n waypoints, there are n-1 bezier curvesfor i in range(len(ax)-1):path, ctr_points = calc_4points_bezier_path(last_ax, last_ay, ayaw[i], ax[i+1], ay[i+1], ayaw[i+1], 2.0)cx = np.concatenate((cx, path.T[0][:-2]))cy = np.concatenate((cy, path.T[1][:-2]))cyaw, k = self.calc_yaw_curvature(cx, cy)last_ax = path.T[0][-1]last_ay = path.T[1][-1]return cx, cy
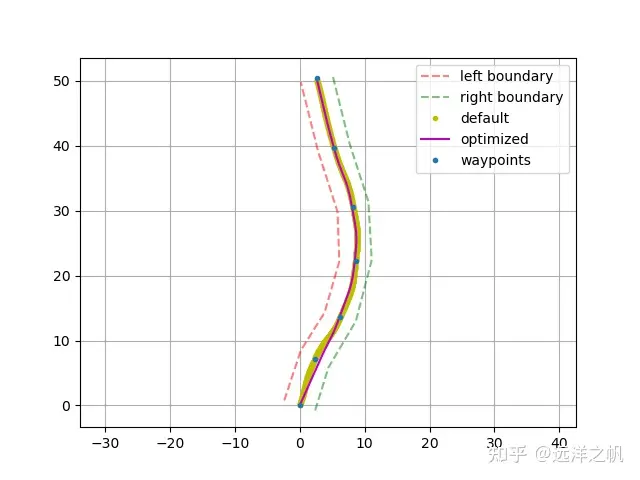
pemandangan dengan halangan, dan fungsi kos digunakan untuk menjauhkan lengkung yang dijana daripada halangan. Untuk mendapatkan trajektori yang boleh dilalui dengan selamat, berikut adalah pelaksanaan kod khusus. Fungsi lambda f dalam optimizer_k adalah untuk menyelesaikan kos apabila trajektori melepasi halangan1 dan penalti2 adalah untuk mencari nilai kos khusus bagi lengkung yang melepasi halangan
b.arc_len(granuality=10)+B. arc_len(granuality= 10)+m_k + penalty1 + penalty2 ialah kos keseluruhan trajektori. Bahagian gelung untuk menggunakan pengoptimuman dan minima scipy untuk menyelesaikan trajektori.def optimizer_k(cd, k, path, i, obs, curve_penalty_multiplier, curve_penalty_divider, curve_penalty_obst):"""Bezier curve optimizer that optimizes the curvature and path length by changing the distance of p1 and p2 from points p0 and p3, respectively. """p_tmp = copy.deepcopy(path)if i+3 > len(path)-1:b = CubicBezier()b.p0 = p_tmp[i]x, y = calc_p1(p_tmp[i], p_tmp[i + 1], p_tmp[i - 1], i, cd[0])b.p1 = Point(x, y)x, y = calc_p2(p_tmp[i-1], p_tmp[i + 0], p_tmp[i + 1], i, cd[1])b.p2 = Point(x, y)b.p3 = p_tmp[i + 1]B = CubicBezier()else:b = CubicBezier()b.p0 = p_tmp[i]x, y = calc_p1(p_tmp[i],p_tmp[i+1],p_tmp[i-1], i, cd[0])b.p1 = Point(x, y)x, y = calc_p2(p_tmp[i],p_tmp[i+1],p_tmp[i+2], i, cd[1])b.p2 = Point(x, y)b.p3 = p_tmp[i + 1]B = CubicBezier()B.p0 = p_tmp[i]x, y = calc_p1(p_tmp[i+1], p_tmp[i + 2], p_tmp[i], i, 10)B.p1 = Point(x, y)x, y = calc_p2(p_tmp[i+1], p_tmp[i + 2], p_tmp[i + 3], i, 10)B.p2 = Point(x, y)B.p3 = p_tmp[i + 1]m_k = b.max_k()if m_k>k:m_k= m_k*curve_penalty_multiplierelse:m_k = m_k/curve_penalty_dividerf = lambda x, y: max(math.sqrt((x[0] - y[0].x) ** 2 + (x[1] - y[0].y) ** 2) * curve_penalty_obst, 10) if math.sqrt((x[0] - y[0].x) ** 2 + (x[1] - y[0].y) ** 2) <h2 id="span-带飞行走廊的Bezier轨迹生成-span"><span>带飞行走廊的Bezier轨迹生成</span></h2><p>得益于贝赛尔曲线拟合的优势,如果我们可以让机器人可行走的轨迹转成多个有重叠区域的凸多面体,那么轨迹完全位于飞行走廊内。</p><p style="text-align:center;"><img src="/static/imghw/default1.png" data-src="https://img.php.cn/upload/article/000/887/227/170524425539093.png" class="lazy" alt="Penjanaan trajektori di bawah kekangan lembut dan keras: penjelasan terperinci tentang teori dan kod"></p><p>image.png</p>
- 飞行走廊由凸多边形组成。
- 每个立方体对应于一段贝塞尔曲线。
- 此曲线的控制点被强制限制在多边形内部。
- 轨迹完全位于所有点的凸包内。
如何通过把障碍物地图生成可行凸包走廊
生成凸包走廊的方法目前有以下三大类的方法:
平行凸簇膨胀方法
从栅格地图出发,利用最小凸集生成算法,完成凸多面体的生成。其算法的思想是首先获得一个凸集,再沿着凸集的表面进行扩张,扩张之后再进行凸集检测,判断新扩张的集合是否保持为凸。一直扩张到不能再扩张为止,再提取凸集的边缘点,利用快速凸集生成算法,生成凸多面体。该算法的好处在于可以利用这种扩张的思路,将安全的多面体的体积尽可能的充满整个空间,因此获得的安全通道更大。但其也具有一定的缺点,就是计算量比较大,计算所需要的时间比较长,为了解决这个问题,在该文章中,又提出了采用GPU加速的方法,来加速计算。
基于凸分解的安全通道生成
基于凸分解的安全通道生成方法由四个步骤完成安全通道的生成,分别为:找到椭球、找到多面体、边界框、收缩。
半定规划的迭代区域膨胀
为了获取多面体,这个方法首先构造一个初始椭球,由一个以选定点为中心的单位球组成。然后,遍历障碍物,为每个障碍物生成一个超平面,该超平面与障碍物相切并将其与椭球分开。再次,这些超平面定义了一组线性约束,它们的交集是一个多面体。然后,可以在那个多面体中找到一个最大的椭球,使用这个椭球来定义一组新的分离超平面,从而定义一个新的多面体。选择生成分离超平面的方法,这样椭圆体的体积在迭代之间永远不会减少。可以重复这个过程,直到椭圆体的增长率低于某个阈值,此时我们返回多面体和内接椭圆体。这个方法具有迭代的思想,并且具有收敛判断的标准,算法的收敛快慢和初始椭球具有很大的关系。
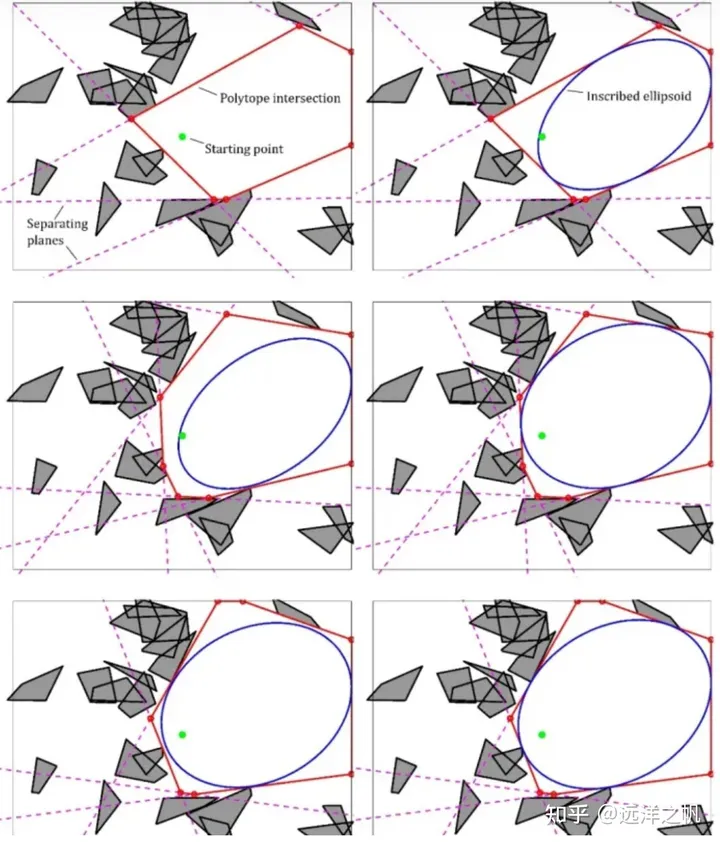
Fig3.半定规划的迭代区域膨胀。每一行即为一次迭代操作,直到椭圆体的增长率低于阈值。image.png
这篇文章介绍的是“半定规划的迭代区域膨胀”方法,具体代码实现如下:
# 根据输入路径对空间进行凸分解def decomp(self, line_points: list[np.array], obs_points: list[np.array], visualize=True):# 最终结果decomp_polygons = list()# 构建输入障碍物点的kdtreeobs_kdtree = KDTree(obs_points)# 进行空间分解for i in range(len(line_points) - 1):# 得到当前线段pf, pr = line_points[i], line_points[i + 1]print(pf)print(pr)# 构建初始多面体init_polygon = self.initPolygon(pf, pr)print(init_polygon.getInterPoints())print(init_polygon.getVerticals())# 过滤障碍物点candidate_obs_point_indexes = obs_kdtree.query_ball_point((pf + pr) / 2, np.linalg.norm([np.linalg.norm(pr - pf) / 2 + self.consider_range_, self.consider_range_]))local_obs_points = list()for index in candidate_obs_point_indexes:if init_polygon.inside(obs_points[index]):local_obs_points.append(obs_points[index])# 得到初始椭圆ellipse = self.findEllipse(pf, pr, local_obs_points)# 根据初始椭圆构建多面体polygon = self.findPolygon(ellipse, init_polygon, local_obs_points)# 进行保存decomp_polygons.append(polygon)if visualize:# 进行可视化plt.figure()# 绘制路径段plt.plot([pf[1], pr[1]], [pf[0], pr[0]], color="red")# 绘制初始多面体verticals = init_polygon.getVerticals()# 绘制多面体顶点plt.plot([v[1] for v in verticals] + [verticals[0][1]], [v[0] for v in verticals] + [verticals[0][0]], color="blue", linestyle="--")# 绘制障碍物点plt.scatter([p[1] for p in local_obs_points], [p[0] for p in local_obs_points], marker="o")# 绘制椭圆ellipse_x, ellipse_y = list(), list()for theta in np.linspace(-np.pi, np.pi, 1000):raw_point = np.array([np.cos(theta), np.sin(theta)])ellipse_point = np.dot(ellipse.C_, raw_point) + ellipse.d_ellipse_x.append(ellipse_point[0])ellipse_y.append(ellipse_point[1])plt.plot(ellipse_y, ellipse_x, color="orange")# 绘制最终多面体# 得到多面体顶点verticals = polygon.getVerticals()# 绘制多面体顶点plt.plot([v[1] for v in verticals] + [verticals[0][1]], [v[0] for v in verticals] + [verticals[0][0]], color="green")plt.show()return decomp_polygons# 构建初始多面体def initPolygon(self, pf: np.array, pr: np.array) -> Polygon:# 记录多面体的平面polygon_planes = list()# 得到线段方向向量dire = self.normalize(pr - pf)# 得到线段法向量dire_h = np.array([dire[1], -dire[0]])# 得到平行范围p_1 = pf + self.consider_range_ * dire_hp_2 = pf - self.consider_range_ * dire_hpolygon_planes.append(Hyperplane(dire_h, p_1))polygon_planes.append(Hyperplane(-dire_h, p_2))# 得到垂直范围p_3 = pr + self.consider_range_ * direp_4 = pf - self.consider_range_ * direpolygon_planes.append(Hyperplane(dire, p_3))polygon_planes.append(Hyperplane(-dire, p_4))# 构建多面体polygon = Polygon(polygon_planes)return polygon# 得到初始椭圆def findEllipse(self, pf: np.array, pr: np.array, obs_points: list[np.array]) -> Ellipse:# 计算长轴long_axis_value = np.linalg.norm(pr - pf) / 2axes = np.array([long_axis_value, long_axis_value])# 计算旋转rotation = self.vec2Rotation(pr - pf)# 计算初始椭圆C = np.dot(rotation, np.dot(np.array([[axes[0], 0], [0, axes[1]]]), np.transpose(rotation)))d = (pr + pf) / 2ellipse = Ellipse(C, d)# 得到椭圆内的障碍物点inside_obs_points = ellipse.insidePoints(obs_points)# 对椭圆进行调整,使得全部障碍物点都在椭圆外while inside_obs_points:# 得到与椭圆距离最近的点closest_obs_point = ellipse.closestPoint(inside_obs_points)# 将最近点转到椭圆坐标系下closest_obs_point = np.dot(np.transpose(rotation), closest_obs_point - ellipse.d_) # 根据最近点,在椭圆长轴不变的情况下对短轴进行改变,使得,障碍物点在椭圆上if Compare.small(closest_obs_point[0], axes[0]):axes[1] = np.abs(closest_obs_point[1]) / np.sqrt(1 - (closest_obs_point[0] / axes[0]) ** 2)# 更新椭圆ellipse.C_ = np.dot(rotation, np.dot(np.array([[axes[0], 0], [0, axes[1]]]), np.transpose(rotation)))# 更新椭圆内部障碍物inside_obs_points = ellipse.insidePoints(inside_obs_points, include_bound=False)return ellipse# 进行多面体的构建def findPolygon(self, ellipse: Ellipse, init_polygon: Polygon, obs_points: list[np.array]) -> Polygon:# 多面体由多个超平面构成polygon_planes = copy.deepcopy(init_polygon.hyper_planes_)# 初始化范围超平面remain_obs_points = obs_pointswhile remain_obs_points:# 得到与椭圆最近障碍物closest_point = ellipse.closestPoint(remain_obs_points)# 计算该处的切平面的法向量norm_vector = np.dot(np.linalg.inv(ellipse.C_), np.dot(np.linalg.inv(ellipse.C_), (closest_point - ellipse.d_)))norm_vector = self.normalize(norm_vector)# 构建平面hyper_plane = Hyperplane(norm_vector, closest_point)# 保存到多面体平面中polygon_planes.append(hyper_plane)# 去除切平面外部的障碍物new_remain_obs_points = list()for point in remain_obs_points:if Compare.small(hyper_plane.signDist(point), 0):new_remain_obs_points.append(point)remain_obs_points = new_remain_obs_pointspolygon = Polygon(polygon_planes)return polygon
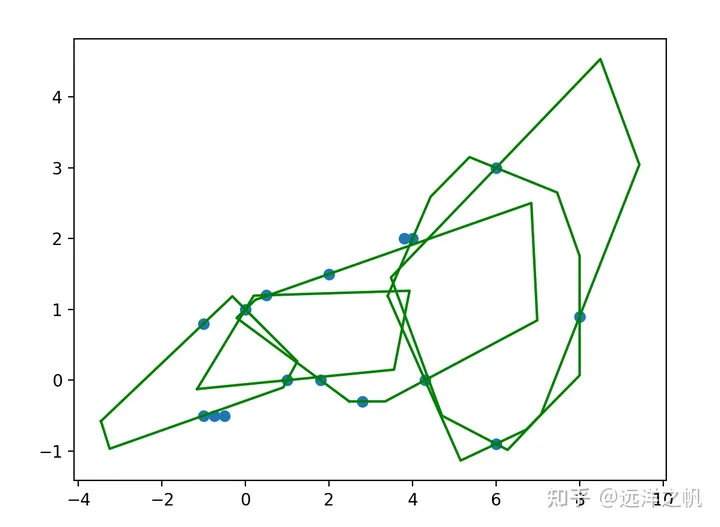
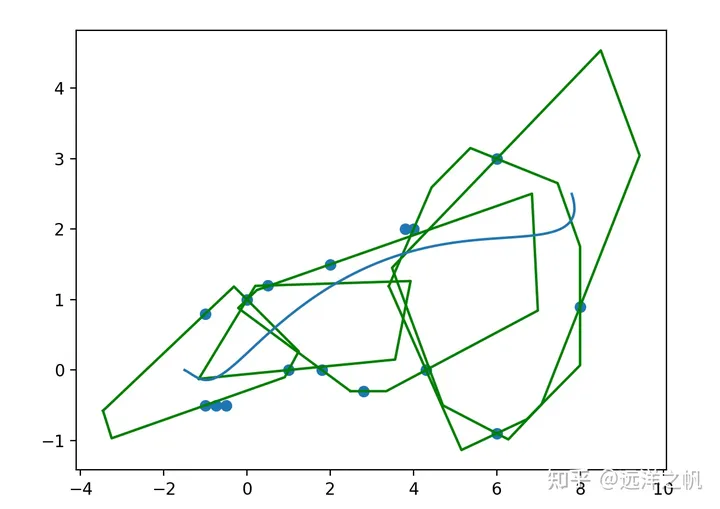
上面图是给定16个障碍物点,必经6个路径点后得到的凸包可行走廊,具体代码如下:
def main():# 路径点line_points = [np.array([-1.5, 0.0]), np.array([0.0, 0.8]), np.array([1.5, 0.3]), np.array([5, 0.6]), np.array([6, 1.2]), np.array([7.6, 2.2])]# 障碍物点obs_points = [np.array([4, 2.0]),np.array([6, 3.0]),np.array([2, 1.5]),np.array([0, 1]),np.array([1, 0]),np.array([1.8, 0]),np.array([3.8, 2]),np.array([0.5, 1.2]),np.array([4.3, 0]),np.array([8, 0.9]),np.array([2.8, -0.3]),np.array([6, -0.9]),np.array([-0.5, -0.5]),np.array([-0.75 ,-0.5]),np.array([-1, -0.5]),np.array([-1, 0.8])]convex_decomp = ConvexDecomp(2)decomp_polygons = convex_decomp.decomp(line_points, obs_points, False)#convex_decomp.decomp(line_points, obs_points,False)plt.figure()# 绘制障碍物点plt.scatter([p[0] for p in obs_points], [p[1] for p in obs_points], marker="o")# 绘制边界for polygon in decomp_polygons:verticals = polygon.getVerticals()# 绘制多面体顶点plt.plot([v[0] for v in verticals] + [verticals[0][0]], [v[1] for v in verticals] + [verticals[0][1]], color="green")#plt.plot(x_samples, y_samples)plt.show()
带凸包走廊求解
带凸包走廊的光滑轨迹生成。前面已经求解得到了可行的凸包走廊,这部分可以做为硬约束作为最优化求解的不等式条件。要求的光滑路径和必须经过点的点,这部分可以把必须经过点作为等式约束,光滑路径可以通过代价函数来实现。这样就可以把带软硬约束的轨迹生成框架各种技能点都用上了。
下面看具体代码实现:
# 进行优化def optimize(self, start_state: np.array, end_state: np.array, line_points: list[np.array], polygons: list[Polygon]):assert(len(line_points) == len(polygons) + 1)# 得到分段数量segment_num = len(polygons)assert(segment_num >= 1)# 计算初始时间分配time_allocations = list()for i in range(segment_num):time_allocations.append(np.linalg.norm(line_points[i+1] - line_points[i]) / self.vel_max_)# 进行优化迭代max_inter = 10cur_iter = 0while cur_iter <h2 id="span-小结-span"><span>小结:</span></h2><p>这篇文章介绍了带软硬约束的轨迹优化算法框架。第一部份介绍了软硬约束对应到最优求解问题数学上如何表示。第二部份介绍了贝赛尔曲线的代码实现,给出了具体的代码实现和讲解;并针对没有障碍物场景只给定waypoint点,生成光滑的Bezier轨迹的朴素求解代码实现。第三部份给出了带障碍物情况下如何做最优化求解,如何通过代价函数的方式来给轨迹施加推力让轨迹远离障碍物的代码实现。第四部分是一个综合性的例子,把软硬约束最优轨迹生成的求解框架做了一个综合呈现。详细的介绍了如何利用障碍物地图生成最大可行区域的凸包走廊,如何利用Bezier曲线的特性给定凸包两点生成路径一定在凸包中;以及如何利用代价行数来保证轨迹的光滑性、安全性,通过等式、不等式约束实现轨迹必须经过哪些点,某个点的运动状态如何。<br>这一系列的文章已经进入结尾的阶段,后面会简单介绍在碰到移动的物体时候单机器人如何处理;以及在多个机器人运行环境如何协同,最后会给出一个Motion Planning的综合实现例子讲解实际环境数据输入、前端规划、后端轨迹生成。至于定位和感知部分的内容后面可以根据情况而定是否在开一个新的系列来讲解介绍,对于更前沿的技术点会跟进论文做些文章分享。<br>最后本系列文章的代码在以下git链接,这部分代码相对零碎主要是配合文章理论来讲的,里面很多片段直接来源于网络整合。后面这可项目会持续维护,把项目代码(应该是c++实现,更体系)、整合进来,根据需要在看看有没必要整合出一个库。</p><p style="text-align:center;"><img src="/static/imghw/default1.png" data-src="https://img.php.cn/upload/article/000/887/227/170524425687764.jpg" class="lazy" alt="Penjanaan trajektori di bawah kekangan lembut dan keras: penjelasan terperinci tentang teori dan kod"></p><p>原文链接:https://mp.weixin.qq.com/s/0EVgYKTxLzUj64L5jzMVug</p>
Atas ialah kandungan terperinci Penjanaan trajektori di bawah kekangan lembut dan keras: penjelasan terperinci tentang teori dan kod. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

Video Face Swap
Tukar muka dalam mana-mana video dengan mudah menggunakan alat tukar muka AI percuma kami!

Artikel Panas
Alat panas

Notepad++7.3.1
Editor kod yang mudah digunakan dan percuma

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

Hantar Studio 13.0.1
Persekitaran pembangunan bersepadu PHP yang berkuasa

Dreamweaver CS6
Alat pembangunan web visual

SublimeText3 versi Mac
Perisian penyuntingan kod peringkat Tuhan (SublimeText3)
Topik panas
 1392
1392
 52
36
110
52
36
110

 Mengapakah Gaussian Splatting begitu popular dalam pemanduan autonomi sehingga NeRF mula ditinggalkan?
Jan 17, 2024 pm 02:57 PM
Mengapakah Gaussian Splatting begitu popular dalam pemanduan autonomi sehingga NeRF mula ditinggalkan?
Jan 17, 2024 pm 02:57 PM
Ditulis di atas & pemahaman peribadi pengarang Gaussiansplatting tiga dimensi (3DGS) ialah teknologi transformatif yang telah muncul dalam bidang medan sinaran eksplisit dan grafik komputer dalam beberapa tahun kebelakangan ini. Kaedah inovatif ini dicirikan oleh penggunaan berjuta-juta Gaussians 3D, yang sangat berbeza daripada kaedah medan sinaran saraf (NeRF), yang terutamanya menggunakan model berasaskan koordinat tersirat untuk memetakan koordinat spatial kepada nilai piksel. Dengan perwakilan adegan yang eksplisit dan algoritma pemaparan yang boleh dibezakan, 3DGS bukan sahaja menjamin keupayaan pemaparan masa nyata, tetapi juga memperkenalkan tahap kawalan dan pengeditan adegan yang tidak pernah berlaku sebelum ini. Ini meletakkan 3DGS sebagai penukar permainan yang berpotensi untuk pembinaan semula dan perwakilan 3D generasi akan datang. Untuk tujuan ini, kami menyediakan gambaran keseluruhan sistematik tentang perkembangan dan kebimbangan terkini dalam bidang 3DGS buat kali pertama.
 Bagaimana untuk menyelesaikan masalah ekor panjang dalam senario pemanduan autonomi?
Jun 02, 2024 pm 02:44 PM
Bagaimana untuk menyelesaikan masalah ekor panjang dalam senario pemanduan autonomi?
Jun 02, 2024 pm 02:44 PM
Semalam semasa temu bual, saya telah ditanya sama ada saya telah membuat sebarang soalan berkaitan ekor panjang, jadi saya fikir saya akan memberikan ringkasan ringkas. Masalah ekor panjang pemanduan autonomi merujuk kepada kes tepi dalam kenderaan autonomi, iaitu, kemungkinan senario dengan kebarangkalian yang rendah untuk berlaku. Masalah ekor panjang yang dirasakan adalah salah satu sebab utama yang kini mengehadkan domain reka bentuk pengendalian kenderaan autonomi pintar satu kenderaan. Seni bina asas dan kebanyakan isu teknikal pemanduan autonomi telah diselesaikan, dan baki 5% masalah ekor panjang secara beransur-ansur menjadi kunci untuk menyekat pembangunan pemanduan autonomi. Masalah ini termasuk pelbagai senario yang berpecah-belah, situasi yang melampau dan tingkah laku manusia yang tidak dapat diramalkan. "Ekor panjang" senario tepi dalam pemanduan autonomi merujuk kepada kes tepi dalam kenderaan autonomi (AVs) kes Edge adalah senario yang mungkin dengan kebarangkalian yang rendah untuk berlaku. kejadian yang jarang berlaku ini
 Pilih kamera atau lidar? Kajian terbaru tentang mencapai pengesanan objek 3D yang mantap
Jan 26, 2024 am 11:18 AM
Pilih kamera atau lidar? Kajian terbaru tentang mencapai pengesanan objek 3D yang mantap
Jan 26, 2024 am 11:18 AM
0. Ditulis di hadapan&& Pemahaman peribadi bahawa sistem pemanduan autonomi bergantung pada persepsi lanjutan, membuat keputusan dan teknologi kawalan, dengan menggunakan pelbagai penderia (seperti kamera, lidar, radar, dll.) untuk melihat persekitaran sekeliling dan menggunakan algoritma dan model untuk analisis masa nyata dan membuat keputusan. Ini membolehkan kenderaan mengenali papan tanda jalan, mengesan dan menjejaki kenderaan lain, meramalkan tingkah laku pejalan kaki, dsb., dengan itu selamat beroperasi dan menyesuaikan diri dengan persekitaran trafik yang kompleks. Teknologi ini kini menarik perhatian meluas dan dianggap sebagai kawasan pembangunan penting dalam pengangkutan masa depan satu. Tetapi apa yang menyukarkan pemanduan autonomi ialah memikirkan cara membuat kereta itu memahami perkara yang berlaku di sekelilingnya. Ini memerlukan algoritma pengesanan objek tiga dimensi dalam sistem pemanduan autonomi boleh melihat dan menerangkan dengan tepat objek dalam persekitaran sekeliling, termasuk lokasinya,
 Kertas Stable Diffusion 3 akhirnya telah dikeluarkan, dan butiran seni bina didedahkan Adakah ia akan membantu untuk menghasilkan semula Sora?
Mar 06, 2024 pm 05:34 PM
Kertas Stable Diffusion 3 akhirnya telah dikeluarkan, dan butiran seni bina didedahkan Adakah ia akan membantu untuk menghasilkan semula Sora?
Mar 06, 2024 pm 05:34 PM
Kertas StableDiffusion3 akhirnya di sini! Model ini dikeluarkan dua minggu lalu dan menggunakan seni bina DiT (DiffusionTransformer) yang sama seperti Sora. Ia menimbulkan kekecohan apabila ia dikeluarkan. Berbanding dengan versi sebelumnya, kualiti imej yang dijana oleh StableDiffusion3 telah dipertingkatkan dengan ketara Ia kini menyokong gesaan berbilang tema, dan kesan penulisan teks juga telah dipertingkatkan, dan aksara bercelaru tidak lagi muncul. StabilityAI menegaskan bahawa StableDiffusion3 ialah satu siri model dengan saiz parameter antara 800M hingga 8B. Julat parameter ini bermakna model boleh dijalankan terus pada banyak peranti mudah alih, dengan ketara mengurangkan penggunaan AI
 Artikel ini sudah cukup untuk anda membaca tentang pemanduan autonomi dan ramalan trajektori!
Feb 28, 2024 pm 07:20 PM
Artikel ini sudah cukup untuk anda membaca tentang pemanduan autonomi dan ramalan trajektori!
Feb 28, 2024 pm 07:20 PM
Ramalan trajektori memainkan peranan penting dalam pemanduan autonomi Ramalan trajektori pemanduan autonomi merujuk kepada meramalkan trajektori pemanduan masa hadapan kenderaan dengan menganalisis pelbagai data semasa proses pemanduan kenderaan. Sebagai modul teras pemanduan autonomi, kualiti ramalan trajektori adalah penting untuk kawalan perancangan hiliran. Tugas ramalan trajektori mempunyai timbunan teknologi yang kaya dan memerlukan kebiasaan dengan persepsi dinamik/statik pemanduan autonomi, peta ketepatan tinggi, garisan lorong, kemahiran seni bina rangkaian saraf (CNN&GNN&Transformer), dll. Sangat sukar untuk bermula! Ramai peminat berharap untuk memulakan ramalan trajektori secepat mungkin dan mengelakkan perangkap Hari ini saya akan mengambil kira beberapa masalah biasa dan kaedah pembelajaran pengenalan untuk ramalan trajektori! Pengetahuan berkaitan pengenalan 1. Adakah kertas pratonton teratur? A: Tengok survey dulu, hlm
 Mari kita bincangkan tentang sistem pemanduan autonomi hujung ke hujung dan generasi seterusnya, serta beberapa salah faham tentang pemanduan autonomi hujung ke hujung?
Apr 15, 2024 pm 04:13 PM
Mari kita bincangkan tentang sistem pemanduan autonomi hujung ke hujung dan generasi seterusnya, serta beberapa salah faham tentang pemanduan autonomi hujung ke hujung?
Apr 15, 2024 pm 04:13 PM
Pada bulan lalu, atas sebab-sebab yang diketahui umum, saya telah mengadakan pertukaran yang sangat intensif dengan pelbagai guru dan rakan sekelas dalam industri. Topik yang tidak dapat dielakkan dalam pertukaran secara semula jadi adalah hujung ke hujung dan Tesla FSDV12 yang popular. Saya ingin mengambil kesempatan ini untuk menyelesaikan beberapa buah fikiran dan pendapat saya pada masa ini untuk rujukan dan perbincangan anda. Bagaimana untuk mentakrifkan sistem pemanduan autonomi hujung ke hujung, dan apakah masalah yang sepatutnya dijangka diselesaikan hujung ke hujung? Menurut definisi yang paling tradisional, sistem hujung ke hujung merujuk kepada sistem yang memasukkan maklumat mentah daripada penderia dan secara langsung mengeluarkan pembolehubah yang membimbangkan tugas. Sebagai contoh, dalam pengecaman imej, CNN boleh dipanggil hujung-ke-hujung berbanding kaedah pengekstrak ciri + pengelas tradisional. Dalam tugas pemanduan autonomi, masukkan data daripada pelbagai penderia (kamera/LiDAR
 SIMPL: Penanda aras ramalan gerakan berbilang ejen yang mudah dan cekap untuk pemanduan autonomi
Feb 20, 2024 am 11:48 AM
SIMPL: Penanda aras ramalan gerakan berbilang ejen yang mudah dan cekap untuk pemanduan autonomi
Feb 20, 2024 am 11:48 AM
Tajuk asal: SIMPL: ASimpleandEfficientMulti-agentMotionPredictionBaselineforAutonomousDriving Paper pautan: https://arxiv.org/pdf/2402.02519.pdf Pautan kod: https://github.com/HKUST-Aerial-Robotics/SIMPL Unit pengarang: Universiti Sains Hong Kong dan Teknologi Idea Kertas DJI: Kertas kerja ini mencadangkan garis dasar ramalan pergerakan (SIMPL) yang mudah dan cekap untuk kenderaan autonomi. Berbanding dengan agen-sen tradisional
 FisheyeDetNet: algoritma pengesanan sasaran pertama berdasarkan kamera fisheye
Apr 26, 2024 am 11:37 AM
FisheyeDetNet: algoritma pengesanan sasaran pertama berdasarkan kamera fisheye
Apr 26, 2024 am 11:37 AM
Pengesanan objek ialah masalah yang agak matang dalam sistem pemanduan autonomi, antaranya pengesanan pejalan kaki adalah salah satu algoritma terawal untuk digunakan. Penyelidikan yang sangat komprehensif telah dijalankan dalam kebanyakan kertas kerja. Walau bagaimanapun, persepsi jarak menggunakan kamera fisheye untuk pandangan sekeliling agak kurang dikaji. Disebabkan herotan jejari yang besar, perwakilan kotak sempadan standard sukar dilaksanakan dalam kamera fisheye. Untuk mengurangkan perihalan di atas, kami meneroka kotak sempadan lanjutan, elips dan reka bentuk poligon am ke dalam perwakilan kutub/sudut dan mentakrifkan metrik mIOU pembahagian contoh untuk menganalisis perwakilan ini. Model fisheyeDetNet yang dicadangkan dengan bentuk poligon mengatasi model lain dan pada masa yang sama mencapai 49.5% mAP pada set data kamera fisheye Valeo untuk pemanduan autonomi
