
 Peranti teknologi
AI
Pengenalan menyeluruh kepada kedudukan pemanduan autonomi—bab paling lengkap dalam sejarah
Peranti teknologi
AI
Pengenalan menyeluruh kepada kedudukan pemanduan autonomi—bab paling lengkap dalam sejarah
Pengenalan menyeluruh kepada kedudukan pemanduan autonomi—bab paling lengkap dalam sejarah

1. Latar Belakang
Baru-baru ini apabila saya berkongsi bagaimana syarikat berteknologi tinggi telah berubah menjadi bidang pemanduan autonomi, beberapa rakan bertanya kepada saya soalan yang sama: "Apakah jawatan untuk pemanduan autonomi L2~L4? Apakah pekerjaan khusus kandungan yang sesuai dengannya?" ? Apakah kemahiran yang diperlukan? "Hari ini saya akan berkongsi tentang topik ini yang semua orang ingin tahu.
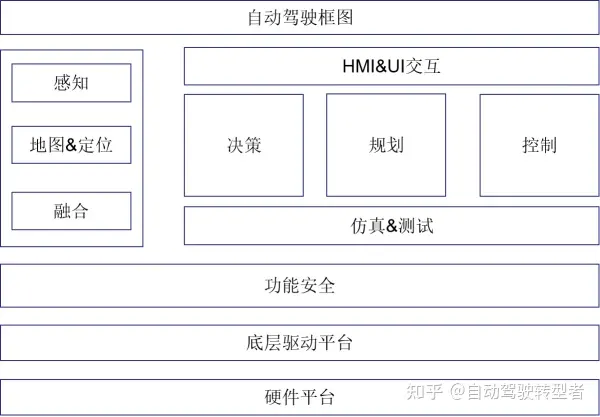
Mula-mula, mari kita perkenalkan gambarajah blok sistem pemanduan autonomi (versi ringkas) untuk memberi semua orang konsep keseluruhan pemanduan autonomi
- Seterusnya, kami akan memperkenalkannya kepada dua kategori utama: jurutera algoritma dan jurutera bukan algoritma .
- Jurutera Algoritma
- Jurutera Algoritma Laser SLAM
- Jurutera Algoritma SLAM Visual
- Jurutera algoritma gabungan berbilang sensor
- Jurutera Algoritma Vigorithm Jurutera Algoritma Pembelajaran Algoritma
- Jurutera Algoritma Pemprosesan Bahasa Asli
- Keputusan Jurutera Algoritma
- Jurutera algoritma perancangan
- Jurutera algoritma kawalan
- Jurutera bukan algoritma
- Jurutera pembangunan platform perisian
- Jurutera keselamatan sistem
- jurutera
- Jurutera persekitaran simulasi
- Jurutera Ujian
- Jurutera Data
- Jurutera Pembangunan UI
- Berikut adalah pengenalan terperinci kepada tanggungjawab kerja dan kandungan yang perlu dipelajari untuk setiap jawatan
- 2. Jurutera Algoritma
Jurutera
- Pengenalan kerja:
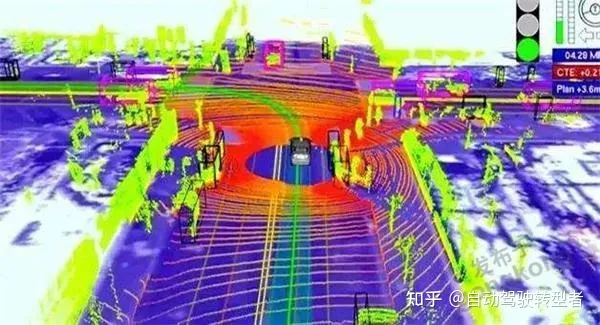
- Kumpul data sensor laser dan bina peta persekitaran sekeliling kenderaan autonomi berdasarkan data awan titik.
- Bertanggungjawab untuk reka bentuk dan pembangunan algoritma SLAM berdasarkan penderia laser, yang boleh mengemas kini dan menghasilkan peta berketepatan tinggi yang meliputi pelbagai pemandangan yang kompleks.
- Keperluan kemahiran:
- Gunakan pengaturcaraan c, c++
- Memerlukan pengetahuan tentang algoritma penapisan: ESKF, EKF, UKF, dsb.
- Pada masa yang sama, anda perlu belajar G2O, framework lain; digunakan untuk mengoptimumkan fungsi ralat tak linear.
- Kebiasaan dengan rangka kerja SLAM sumber terbuka, seperti GLoam, kimera, VINS, dsb. adalah diutamakan

- intro
- LAM, membangunkan navigasi autonomi dan kedudukan robot Algoritma, termasuk membina model gerakan robot berdasarkan lidar, giroskop, odometri, penglihatan dan gabungan maklumat lain
- Keperluan kemahiran:
- Belajar algoritma VSLAM yang biasa digunakan, seperti ORB-SLAM, SVO, DSO, MonoSLAM, VINS Dan RGB-D, dan lain-lain; ceres dan rangka kerja C++ lain yang digunakan untuk mengoptimumkan fungsi ralat tak linear.
- 2.3. Jurutera algoritma gabungan pelbagai sensor
- Pengenalan kerja:
- Memproses dan menggabungkan maklumat daripada berbilang penderia seperti kamera, lidar dan radar gelombang milimeter untuk meningkatkan keupayaan persepsi alam sekitar kenderaan pemanduan autonomi
- Bertanggungjawab untuk pengesanan dan pengesanan sasaran mengenai gabungan maklumat berbilang sumber.
- Keperluan kemahiran:
- Kamera induk, radar gelombang milimeter, lidar, navigasi inersia dan analisis data dan algoritma gabungan lain yang berkaitan
- Ijazah sarjana muda atau ke atas dalam sains maklumat komputer, kejuruteraan elektronik atau jurusan berkaitan matematik; teori Asas
- model kamera ketepatan, geometri multi-visual, prinsip Pelarasan Bundle, pengalaman dalam SfM, julat geometri dan projek lain
- Mahir dalam C/C++, biasa dengan Matlab, idea pengaturcaraan berorientasikan objek yang baik dan tabiat pengekodan
- Familiar dengan IMU, GPS, DR dan rangka kerja algoritma penentududukan navigasi inersia yang lain
- Familiar dengan IMU, GPS, prinsip sistem badan, ciri perkakasan, algoritma penentukuran
i
- .
- Arah ini bertanggungjawab terutamanya untuk pemanduan kenderaan Aplikasi data yang dijana dalam proses dalam kejuruteraan adalah berat sebelah ke arah analisis data, seperti analisis impak perbatuan kenderaan, pemodelan analisis data besar, dsb.
- Keperluan kemahiran:
- Python, C/C++
- Ketahui algoritma teori asas pembelajaran mesin, seperti LR, GBDT, SVM, DNN, dll.
- Pelajari latihan model rangka kerja pembelajaran mesin tradisional -belajar;
- Familiar dengan rangka kerja pembelajaran mendalam seperti PyTorch, TensorFlow (sebahagiannya pada rangkaian saraf), dll. Jurutera Algoritma Penglihatan Komputer lampu isyarat Menunggu pengesanan maklumat lalu lintas dan sebagainya.
Keperluan kemahiran:
C/C++, Python, OpenCV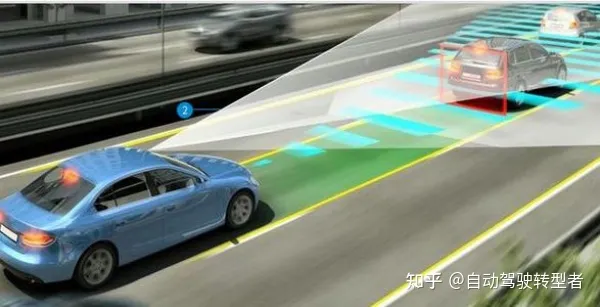 Memerlukan algoritma asas pembelajaran mesin (pengurangan dimensi, klasifikasi, regresi, dll.
Memerlukan algoritma asas pembelajaran mesin (pengurangan dimensi, klasifikasi, regresi, dll.
- Perlu belajar pembelajaran mendalam;
- Belajar komputer Kaedah biasa penglihatan dan pemprosesan imej (pengesanan objek, penjejakan, pembahagian, pengecaman klasifikasi, dll.).
- 2.6. Jurutera algoritma pemprosesan bahasa semulajadi
- Pengenalan kerja:
- Arah ini bertanggungjawab terutamanya untuk pengecaman pertuturan dalam senario kenderaan, reka bentuk interaksi suara, dsb.
- : Belajar Algoritma pembelajaran mesin, algoritma pembelajaran mendalam (RNN);
- Tugas asas pemprosesan bahasa semula jadi (segmentasi perkataan, penandaan sebahagian daripada pertuturan, analisis sintaksis, pengekstrakan kata kunci)
Perlu menggunakan kaedah pembelajaran mesin seperti pengelompokan, pengelasan, regresi, pengisihan dan model lain untuk menyelesaikan masalah perniagaan teks ;Familiar dengan rangka kerja pembelajaran mendalam seperti PyTorch, TensorFlow (sebahagiannya bahagian RNN), dsb. Jurutera Algoritma Keputusan Contohnya, pecutan kereta, nyahpecutan, belok kiri, belok kanan, tukar lorong dan memotong adalah semua output modul membuat keputusan. Keputusan perlu mengambil kira keselamatan dan keselesaan kereta, memastikan keselamatan penumpang dan sampai ke destinasi secepat mungkin.
- Keperluan kemahiran: c/c++/python, biasa dengan sistem ROS;
- Pelajari algoritma membuat keputusan yang biasa digunakan, seperti mesin keadaan keputusan, pepohon keputusan, proses keputusan Markov, POMDP, dll.
- ; Jika anda pergi lebih mendalam Jika anda ingin belajar, anda perlu biasa dengan algoritma pembelajaran mesin (RNN, LSTM, RL), menguasai sekurang-kurangnya satu rangka kerja pembelajaran mendalam (seperti gim atau alam semesta dan platform pembelajaran pengukuhan mendalam yang lain ); biasakan diri dengan model kinematik dan dinamik kenderaan.
- 2.8. Jurutera Algoritma Perancangan
- Pengenalan kerja:
- Perancangan termasuk perancangan laluan dan perancangan kelajuan
- Dalam algoritma perancangan, kenderaan autonomi terlebih dahulu menentukan laluan yang boleh dilalui kenderaan melalui perancangan laluan, dan kemudian memilih laluan untuk menentukan kelajuan boleh dilalui.
- Keperluan kemahiran:
- c/c++/python, sistem pengendalian robot ROS; (sesetengah syarikat dibangunkan menggunakan Matlab/simulink)
- Pelajari algoritma perancangan laluan biasa, seperti A, D, RRT, dll.;
Pelajari Beberapa kaedah perwakilan lengkung, seperti: lengkung kuitik, clothoid, spline padu, B-spline, dll. - Jika anda ingin belajar lebih mendalam, pelajari algoritma ramalan trajektori, seperti MDP, POMDP, Teori Datang, dsb. .;
-
Mempelajari pembelajaran mendalam dan teknologi pembelajaran pengukuhan juga merupakan kelebihan, seperti RNN, LSTM, Deep Q-Learning, dll. - Mempunyai asas dan latar belakang teori matematik, dan biasa dengan model kinematik dan dinamik kenderaan.
-
2.9. Jurutera Algoritma Kawalan

- Pengenalan kerja:
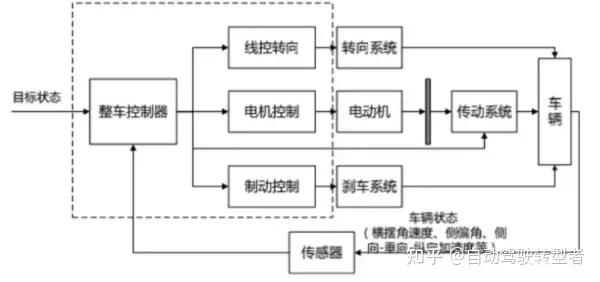
- Secara amnya, ia digunakan untuk memodelkan dinamik mendatar dan menegak kenderaan, dan kemudian membangunkan algoritma kawalan untuk merealisasikan kawalan pergerakan kenderaan, dsb.
- Kedudukan ini lebih berkaitan dengan kenderaan, dan sesuai untuk pengeluar kereta tradisional untuk berubah menjadi bidang pemanduan autonomi Bagi rakan kongsi, ia adalah peluang yang baik untuk memasukinya.
- Keperluan kemahiran:
- C/C++, Matlab/Simulink
- Ketahui asas teori kawalan automatik dan teori kawalan moden
- Belajar algoritma PID, LQR, MPC,
- kenderaan; pemahaman tertentu tentang casis kereta;
- Pelajari perisian simulasi seperti CarSim
- Mempelajari pembangunan fungsi pemanduan tambahan seperti ACC, AEB, APA, LKA, LCC, dan lain-lain adalah bonus
- Mempunyai penyahpepijatan kenderaan sebenar pengalaman juga satu bonus.
3. Jurutera bukan algoritma
3.1. Jurutera pembangunan platform perisian
- Pengenalan kerja:
- pemacu pengubahsuaian/penggunaan perisian autonomi pelaksanaan/peningkatan perisian tengah, penyepaduan sistem, pengoptimuman prestasi/penggunaan kuasa, ujian tekanan/kestabilan/pematuhan
- Bertanggungjawab untuk membina seni bina sistem dan menulis pemacu asas
- Bertanggungjawab untuk pelaksanaan algoritma berkaitan penglihatan pada pemproses terbenam (GPU); , DSP, ARM dan platform lain);
- Membantu jurutera algoritma untuk menyelesaikan pemindahan, penyepaduan, ujian dan pengoptimuman algoritma pada platform terbenam.
- Keperluan kemahiran:
- Kemahiran pengaturcaraan C/C++, Python
- Mempunyai pengalaman dalam pembangunan kernel atau pemacu sistem pengendalian terbenam dan sistem pengendalian masa nyata, biasa dengan QNX, ROS
- Familiar dengan penyahpepijatan perisian alat penyahpepijatan;
- Fahami ECU dan penderia ADAS kenderaan, seperti radar, kamera, ultrasonik dan lidar
- Familiar dengan Perkhidmatan Diagnostik Universal (UDS), Rangkaian Kawasan Pengawal (CAN)
- Familiar dengan protokol komunikasi (CAN, UDS , DoIP, SOME/IP , DDS, MQTT, REST, dsb.) adalah tambahan. 3.2. Jurutera Sistem modularisasi , Reka bentuk seni bina perisian sistem yang boleh disahkan dan pengoptimuman prestasi masa nyata
Bekerja dengan perkakasan, algoritma dan pasukan ujian untuk menyepadukan dan mengoptimumkan sistem pemanduan autonomi.
Keperluan kemahiran:
- Mempunyai pengetahuan teori asas yang kukuh tentang komputer (seperti: kawalan automatik, pengecaman corak, pembelajaran mesin, penglihatan komputer, pemprosesan awan titik) Mempunyai kernel sistem pengendalian terbenam dan masa nyata sistem pengendalian atau pengalaman pembangunan Pemandu;
- Mempunyai kemahiran komunikasi yang baik dan kesedaran kerja berpasukan
-
- 3.3.Jurutera keselamatan fungsional
-
-
Pengenalan pekerjaan:
- Menyokong sepanjang hayat produk
. Bertanggungjawab untuk reka bentuk sistem keselamatan berfungsi produk sistem pemanduan tanpa pemandu/autonom dan mengemukakan cadangan untuk penambahbaikan proses sedia ada - Bertanggungjawab untuk analisis bahaya (HARA, FMEA, FMEDA, FTA) sistem pemanduan tanpa pemandu/berautonomi; Definisi matlamat keselamatan untuk sistem pemanduan tanpa pemandu/berautonomi; atau sistem ADAS; ( Mereka yang bekerja dalam keselamatan berfungsi di kilang kereta tradisional dan ingin menukar kerjaya juga boleh mempertimbangkan
- Fahami FMEA, FMEDA, FMEA-MSR, FTA dan kaedah lain yang sepadan
3.4 Jurutera Penentukuran
;
-
Pengenalan Kerja:
- Bertanggungjawab untuk penentukuran berbilang sensor untuk pemanduan autonomi, termasuk GPS, IMU, LiDAR, Kamera, Radar dan USS, dsb.
- Mereka bentuk dan melaksanakan algoritma penentukuran parameter dalaman dan luaran sensor; , dan membina sistem penentukuran berbilang sensor;
- Bertanggungjawab untuk ujian kenderaan yang berkaitan bagi parameter penentukuran, menyediakan Mengeluarkan laporan ujian.
-
- Keperluan kemahiran:
- C++ pengaturcaraan, biasa dengan sistem Linux dan ROS
Mempunyai pengalaman dalam penentukuran sensor, biasa dengan algoritma visual atau laser SLAM -
-
-
-
- Pengenalan Kerja:
- Arah ini memerlukan penyertaan dalam pembinaan sistem simulasi berkaitan pemanduan autonomi, termasuk simulasi berkaitan dinamik kenderaan, pemodelan dan simulasi pelbagai model sensor maya dan adegan maya, membina senario ujian berdasarkan kes ujian , dan melaksanakan ujian simulasi algoritma pemanduan Autonomi, dsb.
- Bertanggungjawab untuk membina sistem simulasi pemanduan autonomi dan menjalankan simulasi perisian kereta, penderia dan persekitaran. Hasil simulasi akan digunakan bersama-sama dengan data sebenar untuk meramalkan kelakuan kereta dalam senario sebenar
- Bekerjasama dengan modul seperti memandu membuat keputusan, perancangan laluan dan algoritma simulasi untuk merealisasikan simulasi gelung tertutup bagi pemanduan autonomi dan visualisasi; maklumat penyahpepijatan yang berkaitan.
- Keperluan kemahiran:
- MATLAB/simulink, Python/C++
- Mahir dalam mengendalikan dinamik kenderaan biasa atau perisian simulasi berkaitan kenderaan tanpa pemandu, seperti Perscan, Carsim, Carmaker, dsb.
dengan sistem pengendalian robot ROS, dsb. ;- Sesetengah kedudukan simulasi adalah semata-mata untuk simulasi, tetapi sesetengah kedudukan memerlukan pembangunan persekitaran simulasi Kedudukan sedemikian akan mempunyai keperluan pengaturcaraan yang lebih tinggi. Jurutera Ujian 3.6 dan mod kegagalan;
-
Bertanggungjawab untuk reka bentuk dan pelaksanaan ujian automatik (SIL, HIL) dan pengesahan berkaitan produk pemanduan pintar
Bertanggungjawab untuk merumuskan kes ujian dan pelan ujian berdasarkan keperluan fungsi sistem atau produk; Bertanggungjawab untuk merumuskan sistem atau pelan ujian produk yang lengkap dan Melaksanakan, dan akhirnya menulis laporan ujian
Mengumpul dan menguji contoh sempadan sistem, menilai keselamatan sistem pemanduan pintar, dan memberikan maklum balas yang munasabah tentang teknologi.
- Keperluan kemahiran:
- Biasa dengan sistem pengendalian Ubuntu/Linux, boleh menulis skrip python
- Biasa dengan bas CAN
- Biasa dengan kaedah dan teknik menulis kes ujian, mengenali imej
- ; , dan menguasai percikan mata Bonus untuk mereka yang berminat dengan alatan berkaitan data besar
- Akrab dengan aplikasi radar laser, radar gelombang milimeter, probe ultrasonik dan kamera adalah bonus.
-
3.7 Jurutera Pembangunan Data Besar
-
- Pengenalan Kerja:
-
- Data termasuk seni bina data latar belakang dan pembentangan bahagian hadapan. Kenderaan autonomi menjana 1 terabait data setiap hari. Cara membersihkan, memperhalusi dan meringkaskan data dengan cepat, seperti cara mencari pemecatan yang paling penting dengan cepat dalam ujian pemacu. Ini membantu jurutera menguji dengan lebih cekap.
- Bertanggungjawab untuk reka bentuk, pembangunan dan pengoptimuman sistem platform data besar pemacu autonomi
Bertanggungjawab untuk pembangunan alat visual untuk proses anotasi dan pemprosesan data pemanduan autonomi, dan reka bentuk dan pembangunan platform anotasi automatik.
Keperluan kemahiran:
- Mempunyai asas yang kukuh dalam struktur data dan algoritma Mahir dalam sekurang-kurangnya satu bahasa pengaturcaraan peringkat tinggi seperti Java/Python/C++
- Familiar dengan persekitaran pembangunan Linux; Mempunyai pengalaman berdasarkan reka bentuk aplikasi dan pengalaman pembangunan Pangkalan Data SQL atau No-SQL
- Biasa dengan perkhidmatan REST dan standard Web, biasa dengan rangka kerja pembangunan bahagian hadapan arus perdana, seperti React/AngularJS, mata tambahan untuk mereka yang boleh membina secara bebas; aplikasi bahagian hadapan;
- Biasa dengan pemanduan autonomi dan data Lidar, Kamera dan penderia lain yang berkaitan akan diberikan mata tambahan.
-
3.8 Jurutera Pembangunan UI
-
- Pengenalan Kerja:
-
- Setiap syarikat perlu membina alatan dalaman untuk mengesahkan pembangunan kenderaan. Ia juga perlu untuk mencipta pelbagai halaman interaktif untuk pusat kawalan jauh untuk mengawal kenderaan autonomi dari jauh melalui UI. Ia juga termasuk UI yang disediakan untuk penumpang dalam gerabak. Rakan-rakan yang suka reka bentuk atau pandai front-end boleh pertimbangkan.
- Keperluan kemahiran:
-
Mempunyai estetika yang sangat baik dan ekspresi visual yang kaya Mahir dalam warna, grafik, maklumat dan prinsip dan kaedah reka bentuk GUI.
- 4 Berakhir
Akhir sekali, dasar negara sedang giat mempromosikan kenderaan pintar tenaga baharu, dan kami berharap semakin ramai rakan kongsi akan menyertai industri pemanduan autonomi. -
-
Pautan asal: https://mp.weixin.qq.com/s/d41a5VYtJ4lvMP3GO6In_g
- Pengenalan Kerja:
- Arah ini memerlukan penyertaan dalam pembinaan sistem simulasi berkaitan pemanduan autonomi, termasuk simulasi berkaitan dinamik kenderaan, pemodelan dan simulasi pelbagai model sensor maya dan adegan maya, membina senario ujian berdasarkan kes ujian , dan melaksanakan ujian simulasi algoritma pemanduan Autonomi, dsb.
- Bertanggungjawab untuk membina sistem simulasi pemanduan autonomi dan menjalankan simulasi perisian kereta, penderia dan persekitaran. Hasil simulasi akan digunakan bersama-sama dengan data sebenar untuk meramalkan kelakuan kereta dalam senario sebenar
- Bekerjasama dengan modul seperti memandu membuat keputusan, perancangan laluan dan algoritma simulasi untuk merealisasikan simulasi gelung tertutup bagi pemanduan autonomi dan visualisasi; maklumat penyahpepijatan yang berkaitan.
- Keperluan kemahiran:
- MATLAB/simulink, Python/C++
- Mahir dalam mengendalikan dinamik kenderaan biasa atau perisian simulasi berkaitan kenderaan tanpa pemandu, seperti Perscan, Carsim, Carmaker, dsb. dengan sistem pengendalian robot ROS, dsb. ;
- Sesetengah kedudukan simulasi adalah semata-mata untuk simulasi, tetapi sesetengah kedudukan memerlukan pembangunan persekitaran simulasi Kedudukan sedemikian akan mempunyai keperluan pengaturcaraan yang lebih tinggi. Jurutera Ujian 3.6 dan mod kegagalan;
- Bertanggungjawab untuk reka bentuk dan pelaksanaan ujian automatik (SIL, HIL) dan pengesahan berkaitan produk pemanduan pintar
Bertanggungjawab untuk merumuskan kes ujian dan pelan ujian berdasarkan keperluan fungsi sistem atau produk; Bertanggungjawab untuk merumuskan sistem atau pelan ujian produk yang lengkap dan Melaksanakan, dan akhirnya menulis laporan ujian
Mengumpul dan menguji contoh sempadan sistem, menilai keselamatan sistem pemanduan pintar, dan memberikan maklum balas yang munasabah tentang teknologi.- Keperluan kemahiran:
- Biasa dengan sistem pengendalian Ubuntu/Linux, boleh menulis skrip python
- Biasa dengan bas CAN
- Biasa dengan kaedah dan teknik menulis kes ujian, mengenali imej
- ; , dan menguasai percikan mata Bonus untuk mereka yang berminat dengan alatan berkaitan data besar
- Akrab dengan aplikasi radar laser, radar gelombang milimeter, probe ultrasonik dan kamera adalah bonus.
- 3.7 Jurutera Pembangunan Data Besar
- Pengenalan Kerja:
- Data termasuk seni bina data latar belakang dan pembentangan bahagian hadapan. Kenderaan autonomi menjana 1 terabait data setiap hari. Cara membersihkan, memperhalusi dan meringkaskan data dengan cepat, seperti cara mencari pemecatan yang paling penting dengan cepat dalam ujian pemacu. Ini membantu jurutera menguji dengan lebih cekap.
- Bertanggungjawab untuk reka bentuk, pembangunan dan pengoptimuman sistem platform data besar pemacu autonomi
Keperluan kemahiran:
- Mempunyai asas yang kukuh dalam struktur data dan algoritma Mahir dalam sekurang-kurangnya satu bahasa pengaturcaraan peringkat tinggi seperti Java/Python/C++
- Familiar dengan persekitaran pembangunan Linux; Mempunyai pengalaman berdasarkan reka bentuk aplikasi dan pengalaman pembangunan Pangkalan Data SQL atau No-SQL
- Biasa dengan perkhidmatan REST dan standard Web, biasa dengan rangka kerja pembangunan bahagian hadapan arus perdana, seperti React/AngularJS, mata tambahan untuk mereka yang boleh membina secara bebas; aplikasi bahagian hadapan;
- Biasa dengan pemanduan autonomi dan data Lidar, Kamera dan penderia lain yang berkaitan akan diberikan mata tambahan.
- 3.8 Jurutera Pembangunan UI
- Pengenalan Kerja:
- Setiap syarikat perlu membina alatan dalaman untuk mengesahkan pembangunan kenderaan. Ia juga perlu untuk mencipta pelbagai halaman interaktif untuk pusat kawalan jauh untuk mengawal kenderaan autonomi dari jauh melalui UI. Ia juga termasuk UI yang disediakan untuk penumpang dalam gerabak. Rakan-rakan yang suka reka bentuk atau pandai front-end boleh pertimbangkan.
- Keperluan kemahiran:
Mahir dalam warna, grafik, maklumat dan prinsip dan kaedah reka bentuk GUI.
- 4 Berakhir Akhir sekali, dasar negara sedang giat mempromosikan kenderaan pintar tenaga baharu, dan kami berharap semakin ramai rakan kongsi akan menyertai industri pemanduan autonomi.
- Pautan asal: https://mp.weixin.qq.com/s/d41a5VYtJ4lvMP3GO6In_g
Atas ialah kandungan terperinci Pengenalan menyeluruh kepada kedudukan pemanduan autonomi—bab paling lengkap dalam sejarah. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

AI Hentai Generator
Menjana ai hentai secara percuma.

Artikel Panas
Alat panas

Notepad++7.3.1
Editor kod yang mudah digunakan dan percuma

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

Hantar Studio 13.0.1
Persekitaran pembangunan bersepadu PHP yang berkuasa

Dreamweaver CS6
Alat pembangunan web visual

SublimeText3 versi Mac
Perisian penyuntingan kod peringkat Tuhan (SublimeText3)
Topik panas



 Ciri-ciri wajah berterbangan, mulut terbuka, mata terbuka, dan kening terangkat AI boleh menirunya dengan sempurna Penipuan video adalah mustahil untuk dicegah.
Dec 14, 2023 pm 11:30 PM
Ciri-ciri wajah berterbangan, mulut terbuka, mata terbuka, dan kening terangkat AI boleh menirunya dengan sempurna Penipuan video adalah mustahil untuk dicegah.
Dec 14, 2023 pm 11:30 PM
Dengan kebolehan tiruan AI yang begitu kuat, ia benar-benar mustahil untuk menghalangnya, sama sekali mustahil untuk menghalangnya. Adakah pembangunan AI mencapai tahap ini sekarang? Kaki hadapan anda membuat ciri-ciri wajah anda terbang, dan pada kaki belakang anda, ekspresi yang sama direproduksi Menatap, mengangkat kening, mencebik, tidak kira betapa berlebihan ekspresi itu, semuanya ditiru dengan sempurna. Tingkatkan kesukaran, angkat kening lebih tinggi, buka mata lebih luas, malah bentuk mulutnya bengkok, dan avatar watak maya dapat menghasilkan semula ekspresi dengan sempurna. Apabila anda melaraskan parameter di sebelah kiri, avatar maya di sebelah kanan juga akan menukar pergerakannya dengan sewajarnya untuk memberikan gambaran dekat mulut dan mata Tiruan itu tidak boleh dikatakan sama, tetapi ungkapan itu betul-betul sama (paling kanan). Penyelidikan ini datang dari institusi seperti Universiti Teknikal Munich, yang mencadangkan GaussianAvatars, yang
 Adakah anda tahu bahawa pengaturcara akan merosot dalam beberapa tahun?
Nov 08, 2023 am 11:17 AM
Adakah anda tahu bahawa pengaturcara akan merosot dalam beberapa tahun?
Nov 08, 2023 am 11:17 AM
Majalah "ComputerWorld" pernah menulis artikel yang mengatakan bahawa "pengaturcaraan akan hilang menjelang 1960" kerana IBM membangunkan bahasa baharu FORTRAN, yang membolehkan jurutera menulis formula matematik yang mereka perlukan dan kemudian menyerahkannya kepada komputer, jadi pengaturcaraan tamat. Beberapa tahun kemudian, kami mendengar pepatah baru: mana-mana ahli perniagaan boleh menggunakan istilah perniagaan untuk menerangkan masalah mereka dan memberitahu komputer apa yang perlu dilakukan Menggunakan bahasa pengaturcaraan yang dipanggil COBOL ini, syarikat tidak lagi memerlukan pengaturcara. Kemudian, dikatakan bahawa IBM membangunkan bahasa pengaturcaraan baharu yang dipanggil RPG yang membolehkan pekerja mengisi borang dan menjana laporan, jadi kebanyakan keperluan pengaturcaraan syarikat dapat diselesaikan melaluinya.
 MotionLM: Teknologi pemodelan bahasa untuk ramalan gerakan berbilang ejen
Oct 13, 2023 pm 12:09 PM
MotionLM: Teknologi pemodelan bahasa untuk ramalan gerakan berbilang ejen
Oct 13, 2023 pm 12:09 PM
Artikel ini dicetak semula dengan kebenaran daripada akaun awam Autonomous Driving Heart. Sila hubungi sumber untuk mencetak semula. Tajuk asal: MotionLM: Multi-Agent Motion Forecasting as Language Modelling Paper pautan: https://arxiv.org/pdf/2309.16534.pdf Gabungan pengarang: Waymo Conference: ICCV2023 Idea kertas: Untuk perancangan keselamatan kenderaan autonomi, ramalkan tingkah laku masa hadapan dengan pasti ejen jalan raya adalah penting. Kajian ini mewakili trajektori berterusan sebagai jujukan token gerakan diskret dan menganggap ramalan gerakan berbilang agen sebagai tugas pemodelan bahasa. Model yang kami cadangkan, MotionLM, mempunyai kelebihan berikut: Pertama
 Robot Humanoid Universal Pintar Fourier GR-1 akan memulakan pra-jualan!
Sep 27, 2023 pm 08:41 PM
Robot Humanoid Universal Pintar Fourier GR-1 akan memulakan pra-jualan!
Sep 27, 2023 pm 08:41 PM
Robot humanoid, yang berketinggian 1.65 meter, beratnya 55 kilogram dan mempunyai 44 darjah kebebasan dalam badannya, boleh berjalan dengan cepat, mengelak halangan dengan cepat, memanjat cerun naik dan turun secara berterusan, dan menahan hentaman dan gangguan Anda kini boleh membawanya pulang ! Robot humanoid universal Fourier Intelligence GR-1 telah memulakan pra-jualan Dewan Kuliah Robot Robot humanoid universal Fourier GR-1 Fourier Intelligence kini telah dibuka untuk pra-jualan. GR-1 mempunyai konfigurasi batang yang sangat bionik dan kawalan pergerakan antropomorfik Ia mempunyai 44 darjah kebebasan di seluruh badan Ia mempunyai keupayaan untuk berjalan, mengelakkan halangan, memanjat halangan, naik dan turun cerun, menentang gangguan, dan menyesuaikan diri. ke permukaan jalan yang berbeza Ia adalah sistem kecerdasan buatan umum. Halaman pra-jualan tapak web rasmi: www.fftai.cn/order#FourierGR-1# Fourier Intelligence perlu ditulis semula.
 Huawei akan melancarkan sistem penderiaan Xuanji dalam bidang boleh pakai pintar, yang boleh menilai keadaan emosi pengguna berdasarkan kadar denyutan jantung
Aug 29, 2024 pm 03:30 PM
Huawei akan melancarkan sistem penderiaan Xuanji dalam bidang boleh pakai pintar, yang boleh menilai keadaan emosi pengguna berdasarkan kadar denyutan jantung
Aug 29, 2024 pm 03:30 PM
Baru-baru ini, Huawei mengumumkan bahawa ia akan melancarkan produk boleh pakai pintar baharu yang dilengkapi sistem penderiaan Xuanji pada bulan September, yang dijangka menjadi jam tangan pintar terbaru Huawei. Produk baharu ini akan menyepadukan fungsi pemantauan kesihatan emosi termaju Sistem Persepsi Xuanji menyediakan pengguna dengan penilaian kesihatan yang komprehensif dengan enam cirinya - ketepatan, kekomprehensif, kelajuan, fleksibiliti, keterbukaan dan skalabiliti. Sistem ini menggunakan modul penderiaan super dan mengoptimumkan teknologi seni bina laluan optik berbilang saluran, yang meningkatkan ketepatan pemantauan penunjuk asas seperti kadar jantung, oksigen darah dan kadar pernafasan. Selain itu, Sistem Penderiaan Xuanji juga telah mengembangkan penyelidikan mengenai keadaan emosi berdasarkan data kadar jantung Ia tidak terhad kepada penunjuk fisiologi, tetapi juga boleh menilai keadaan emosi dan tahap tekanan pengguna. Ia menyokong pemantauan lebih daripada 60 sukan penunjuk kesihatan, meliputi kardiovaskular, pernafasan, neurologi, endokrin,
 Apakah kaedah yang berkesan dan kaedah Pangkalan biasa untuk ramalan trajektori pejalan kaki? Perkongsian kertas persidangan teratas!
Oct 17, 2023 am 11:13 AM
Apakah kaedah yang berkesan dan kaedah Pangkalan biasa untuk ramalan trajektori pejalan kaki? Perkongsian kertas persidangan teratas!
Oct 17, 2023 am 11:13 AM
Ramalan trajektori telah mendapat momentum dalam tempoh dua tahun yang lalu, tetapi kebanyakannya memfokuskan pada arah ramalan trajektori kenderaan Hari ini, Jantung Pemanduan Autonomi akan berkongsi dengan anda algoritma untuk ramalan trajektori pejalan kaki pada NeurIPS - SHENet Dalam senario terhad, manusia corak pergerakan biasanya Pada tahap tertentu, ia mematuhi peraturan yang terhad. Berdasarkan andaian ini, SHENet meramalkan trajektori masa depan seseorang dengan mempelajari peraturan adegan tersirat. Artikel itu telah dibenarkan untuk menjadi asli oleh Autonomous Driving Heart! Pemahaman peribadi penulis, pada masa ini meramalkan trajektori masa depan seseorang masih menjadi masalah yang mencabar kerana rawak dan subjektiviti pergerakan manusia. Walau bagaimanapun, corak pergerakan manusia dalam adegan terhalang selalunya berbeza-beza disebabkan oleh kekangan pemandangan (cth., pelan lantai, jalan raya dan halangan) dan interaktiviti manusia dengan manusia atau manusia dengan objek.
 UniOcc: Menyatukan ramalan penghunian bertumpu penglihatan dengan pemaparan geometri dan semantik!
Sep 16, 2023 pm 08:29 PM
UniOcc: Menyatukan ramalan penghunian bertumpu penglihatan dengan pemaparan geometri dan semantik!
Sep 16, 2023 pm 08:29 PM
Tajuk asal: UniOcc: UnifyingVision-Centric3DOccupancyPredictionwithGeometricandSemanticRendering Sila klik pautan berikut untuk melihat kertas: https://arxiv.org/pdf/2306.09117.pdf Idea kertas: Dalam laporan teknikal ini, kami mencadangkan penyelesaian yang dipanggil UniOCC, menggunakan Untuk penglihatan- trajektori ramalan penghunian 3D sentrik dalam CVPR2023nuScenesOpenDatasetChallenge. Kaedah ramalan penghunian sedia ada tertumpu terutamanya pada penggunaan label penghunian tiga dimensi
 Jam tangan pintar saya tidak dapat dihidupkan: Perkara yang perlu dilakukan sekarang
Aug 23, 2023 pm 05:41 PM
Jam tangan pintar saya tidak dapat dihidupkan: Perkara yang perlu dilakukan sekarang
Aug 23, 2023 pm 05:41 PM
Apa yang perlu dilakukan jika jam tangan pintar anda tidak dapat dihidupkan? Berikut ialah pilihan yang tersedia untuk memulihkan kehidupan jam tangan pintar kesayangan anda. SEMAK POWER PLAY: Bayangkan pentas bertatah bintang dengan jam tangan pintar anda sebagai tajuk utama, tetapi langsir tidak terangkat kerana terlupa bateri! Sebelum kita menyelidiki butirannya, pastikan jam tangan pintar anda bukan sahaja berjalan pada asap dan cermin. Beri masa pengecasan yang betul, dan jika anda berasa sedikit tambahan, berikan kabel baharu yang bergaya - jenis fesyen ke hadapan! But semula Hebat: Apabila ragu-ragu, berikan sedikit R&R - itu Reboot dan Revival! Tekan dan tahan butang ini seperti seorang maestro yang menjalankan simfoni. Jam tangan pintar yang berbeza mempunyai ritual but semula mereka sendiri — Google ialah panduan anda. Ini adalah a
