
 Peranti teknologi
AI
Pengasas bersama OpenAI Karpathy menerbitkan artikel: Mengambil pemanduan autonomi sebagai contoh untuk menerangkan AGI! Teks asal telah dipadamkan, sila tandai buku itu sekarang
Peranti teknologi
AI
Pengasas bersama OpenAI Karpathy menerbitkan artikel: Mengambil pemanduan autonomi sebagai contoh untuk menerangkan AGI! Teks asal telah dipadamkan, sila tandai buku itu sekarang
Pengasas bersama OpenAI Karpathy menerbitkan artikel: Mengambil pemanduan autonomi sebagai contoh untuk menerangkan AGI! Teks asal telah dipadamkan, sila tandai buku itu sekarang

Berkenaan "kecerdasan buatan umum", saintis OpenAI Karpathy memberi penjelasan.
Beberapa hari lalu, Karpathy menerbitkan artikel di blog peribadinya "Mengkaji pemanduan autonomi sebagai kes AGI."


Saya tidak tahu mengapa, tetapi dia memadamkan artikel ini Mujurlah ada sandaran rangkaian.
Seperti yang kita semua tahu, Karpathy bukan sahaja salah seorang ahli pengasas OpenAI, tetapi juga bekas pengarah kanan AI dan ketua Autopilot pemanduan autonomi di Tesla.
Beliau menggunakan pemanduan autonomi sebagai kajian kes untuk mengkaji AGI. Pandangan artikel ini memang patut dibaca.

Pemandu Autonomi
Wabak LLM telah mencetuskan banyak perbincangan tentang bila AGI akan tiba, dan juga rupanya.
Sesetengah orang penuh harapan dan optimis tentang masa depan AGI. Dan sesetengah orang penuh dengan ketakutan dan pesimisme.
Malangnya, banyak perbincangan yang terlalu abstrak menyebabkan pendapat orang ramai tidak konsisten antara satu sama lain.
Oleh itu, saya sentiasa mencari analogi konkrit dan preseden sejarah untuk mendekati topik ini dalam istilah yang lebih konkrit.
Lebih-lebih lagi, apabila saya ditanya "Apa agaknya rupa AGI", saya secara peribadi suka menggunakan pemanduan autonomi sebagai contoh. Dalam artikel ini saya ingin menjelaskan mengapa. Mari kita mulakan dengan definisi biasa AGI:
AGI: Sistem autonomi yang melebihi keupayaan manusia dalam kebanyakan tugas yang bernilai ekonomi.

Sila ambil perhatian bahawa terdapat dua keperluan khusus dalam definisi AGI ini.
Pertama sekali, ia adalah sistem autonomi sepenuhnya, iaitu ia beroperasi sendiri dengan sedikit atau tiada pengawasan manusia.
Kedua, ia beroperasi secara autonomi pada kebanyakan kerja yang bernilai ekonomi. Untuk bahagian data ini, saya secara peribadi ingin merujuk kepada Indeks Pekerjaan daripada Biro Perangkaan Buruh A.S..
Sistem yang mempunyai dua sifat ini pada masa yang sama, kita panggil AGI.

Apa yang saya ingin cadangkan dalam artikel ini ialah perkembangan terkini keupayaan memandu sendiri kami adalah kajian kes awal yang sangat baik tentang dinamik masyarakat yang semakin automatik yang boleh diperluaskan kepada penampilan AGI. seperti secara umum dan kajian perasaan.
Sebab saya rasa begitu ialah bidang ini mempunyai beberapa ciri. Anda hanya boleh mengatakan "ia adalah masalah besar": pemanduan autonomi sangat mudah difahami dan lebih biasa untuk masyarakat.
Ia menduduki sebahagian besar daripada skala ekonomi dan menggunakan sejumlah besar tenaga kerja manusia. Memandu adalah masalah yang cukup kompleks, tetapi kami telah mencapai automasi dan ia telah menarik perhatian besar daripada masyarakat.
Sudah tentu, terdapat industri lain yang telah mencapai automasi berskala besar, tetapi sama ada saya tidak mengenalinya secara peribadi, atau mereka tidak mempunyai beberapa sifat di atas.
Automasi tahap L2
Automasi pemanduan dianggap sebagai masalah yang sangat mencabar dalam bidang AI dan tidak boleh diselesaikan dalam sekelip mata.
Ia dibentuk melalui proses mengautomasikan tugas pemanduan secara beransur-ansur Proses ini melibatkan banyak peringkat "AI berasaskan alat".
Dari segi automasi kenderaan, pada masa ini banyak kereta dilengkapi dengan sistem bantuan pemanduan tahap L2. Iaitu, AI yang boleh bekerjasama dengan pemandu manusia untuk melengkapkan perjalanan dari titik permulaan ke destinasi.
Walaupun belum autonomi sepenuhnya, L2 sudah boleh mengendalikan banyak tugas asas dalam pemanduan.
Kadangkala, ia juga boleh melengkapkan keseluruhan proses operasi secara automatik, seperti tempat letak kenderaan automatik.

Dalam proses ini, manusia terutamanya memainkan peranan penyeliaan malah boleh mengambil alih pada bila-bila masa, memandu terus atau mengeluarkan arahan peringkat tinggi (seperti permintaan pertukaran lorong).
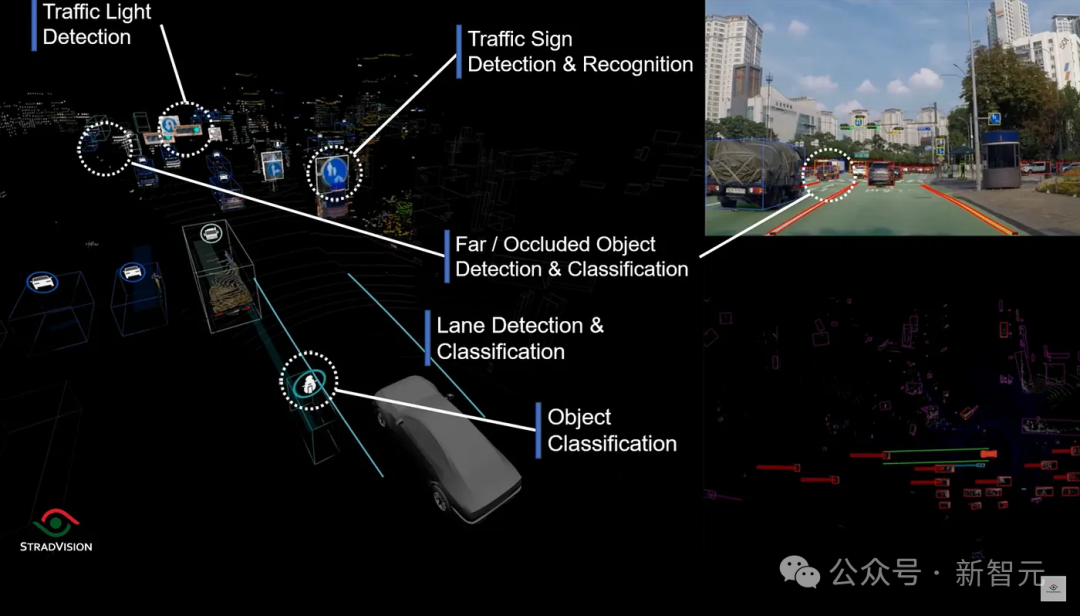
Dalam beberapa aspek (seperti mengekalkan lorong di tengah dan membuat keputusan pantas), prestasi AI malah melebihi manusia, tetapi ia masih gagal dalam beberapa situasi yang jarang berlaku.
Ini sangat serupa dengan banyak alat AI yang kami lihat dalam industri lain, terutamanya dengan penemuan teknologi terbaru LLM.
Sebagai contoh, sebagai pengaturcara, apabila saya menggunakan GitHub Copilot untuk melengkapkan sekeping kod secara automatik, atau menggunakan GPT-4 untuk menulis fungsi yang lebih kompleks, saya sebenarnya menyerahkan tugas asas kepada sistem automatik.
Tetapi sekali lagi, saya sentiasa boleh masuk dan membuat pelarasan jika perlu.
Dalam erti kata lain, Copilot dan GPT-4 adalah seperti alat automasi "sekunder" dalam bidang pengaturcaraan.
Terdapat banyak penyelesaian automasi "sekunder" yang serupa di seluruh industri, tetapi tidak semuanya berdasarkan model besar, daripada TurboTax, kepada robot gudang Amazon, kepada terjemahan, penulisan, seni, undang-undang, Pelbagai "AI berasaskan alat" dalam bidang pemasaran dan lain-lain.
Full Self-Driving
Lama-kelamaan, sesetengah sistem mencapai tahap kebolehpercayaan baharu dan menjadi seperti Waymo hari ini.
Mereka secara beransur-ansur menyedari "pemanduan autonomi sepenuhnya".
Kini, di San Francisco, anda hanya boleh membuka apl dan memanggil kereta pandu sendiri Waymo, yang akan menjemput anda dan menghantar anda dengan selamat ke destinasi anda.
Ini sungguh menakjubkan. Anda tidak perlu tahu memandu, dan anda tidak perlu memberi perhatian kepada keadaan jalan raya Anda hanya perlu duduk dengan selesa dan tidur sebentar, dan sistem akan membawa anda dari titik permulaan ke titik penamat. .
Seperti ramai orang yang pernah saya bincangkan, saya secara peribadi lebih suka Waymo berbanding Uber dan saya menggunakannya hampir secara eksklusif untuk pengangkutan dalam bandar.
Anda akan mendapat pengalaman perjalanan yang lebih stabil dan boleh diramalkan, dan proses pemanduan lancar, dan anda boleh mendengar muzik tanpa mempedulikan apa yang pemandu fikirkan apabila dia mendengar anda.

"Ekonomi Kompaun"
Walaupun teknologi pandu sendiri telah menjadi kenyataan, ramai orang masih memilih untuk menggunakan Uber. kenapa?
Pertama sekali, ramai orang tidak tahu bahawa mereka boleh memilih Waymo sebagai alat pengangkutan. Walaupun mereka tahu, ramai orang masih kurang kepercayaan terhadap sistem automatik dan lebih suka dipandu oleh pemandu manusia.
Namun, walaupun sesetengah orang menerima pemanduan autonomi, mungkin mereka masih lebih suka pemandu manusia, seperti menikmati perbualan dengan pemandu dan interaksi dengan orang lain.
Ia bukan sekadar keutamaan peribadi Ia dapat dilihat daripada masa menunggu yang semakin meningkat dalam aplikasi semasa bahawa Waymo menghadapi masalah bekalan melebihi permintaan. Bilangan kenderaan di pasaran jauh tidak mencukupi untuk memenuhi permintaan.
Sebahagian daripada sebabnya mungkin Waymo sangat berhati-hati dalam mengurus dan memantau risiko dan pendapat umum.
Sebaliknya, setakat yang saya tahu, Waymo dihadkan oleh pengawal selia dan hanya boleh menempatkan sejumlah kenderaan di jalanan. Faktor pengehad lain ialah Waymo tidak boleh menggantikan Uber sepenuhnya dalam sekelip mata.
Mereka perlu membina infrastruktur, menghasilkan kereta dan mengembangkan operasi.
Saya secara peribadi berpendapat perkara yang sama akan berlaku dengan automasi dalam sektor ekonomi lain - sesetengah orang/syarikat akan menerima pakai mereka serta-merta, tetapi ramai orang (1) tidak memahami teknologi, dan (2) walaupun mereka melakukannya, mereka tidak akan mempercayai mereka, (3) Walaupun mereka percaya, mereka masih lebih bersedia untuk bekerjasama dengan manusia.
Tetapi selain itu, permintaan melebihi bekalan, dan AGI akan tertakluk kepada kekangan yang sama atas sebab yang sama, termasuk kekangan diri pembangun, kekangan kawal selia dan kekurangan sumber, seperti keperluan untuk membina lebih banyak pusat data GPU.
Globalisasi Teknologi
Seperti yang telah saya nyatakan dalam kekangan sumber, penggunaan global teknologi ini sangat mahal, memerlukan banyak tenaga kerja, dan lambat untuk dipromosikan.
Hari ini, Waymo hanya boleh memandu di San Francisco dan Phoenix, tetapi teknologi itu sendiri adalah serba boleh dan berskala, jadi syarikat itu mungkin akan berkembang ke Los Angeles, Austin dan tempat lain tidak lama lagi.
Kereta pandu sendiri juga mungkin dihadkan oleh faktor persekitaran lain, seperti memandu dalam salji tebal. Dalam beberapa kes yang jarang berlaku, ia mungkin memerlukan penyelamatan operator.

Selain itu, pengembangan keupayaan teknikal juga memerlukan kos sumber yang banyak dan tidak percuma.
Sebagai contoh, Waymo mesti melabur sumber sebelum memasuki bandar lain, seperti melukis peta jalan, keseluruhan perancangan laluan persepsi dan mengawal algoritma untuk menyesuaikan diri dengan situasi khas atau peraturan tempatan tertentu.
Seperti yang ditunjukkan oleh metafora kerja kami, banyak pekerjaan mungkin hanya diautomasikan dalam keadaan tertentu dan peningkatan akan memerlukan banyak kerja.
Dalam mana-mana kes, teknologi pemanduan autonomi itu sendiri adalah universal dan boleh skala, dan prospek aplikasinya akan berkembang secara beransur-ansur dari semasa ke semasa. . masih bersemangat Ia telah dibincangkan dan penuh dengan keraguan dan kebimbangan, dan perdebatan sama ada ia boleh berjaya, atau walaupun ia boleh dilaksanakan, menjadi perkara yang menarik minat meluas. Tetapi kini, pemanduan autonomi bukan lagi impian masa depan, ia benar-benar berlaku.
Ia bukan sekadar prototaip penyelidikan, tetapi mod pengangkutan automatik sepenuhnya yang boleh dibeli dengan wang.
Dalam skop aplikasi semasa, teknologi pemanduan autonomi telah mencapai autonomi sepenuhnya.
Namun, secara keseluruhannya, ini nampaknya tidak menarik perhatian terlalu ramai orang. Kebanyakan orang yang saya ajak bercakap (termasuk dalam teknologi!) tidak menyedari perkembangan ini.
Apabila anda menunggang Waymo di jalan-jalan di San Francisco, anda akan dapati ramai orang melemparkan pandangan ingin tahu ke arahnya. Mereka mula-mula akan terkejut, kemudian merenung dengan rasa ingin tahu.
Selepas itu, mereka akan meneruskan kehidupan mereka.
Apabila teknologi pandu kendiri juga mencapai autonomi penuh dalam industri lain, dunia mungkin tidak bergolak.
Kebanyakan orang mungkin tidak menyedari perubahan ini pada mulanya. Apabila mereka perasan, mereka mungkin hanya melihatnya dengan rasa ingin tahu dan kemudian mengenepikannya, dengan reaksi yang terdiri daripada penafian kepada penerimaan.
Sesetengah orang mungkin kecewa dengan perkara ini malah mengambil beberapa tindakan bantahan, seperti meletakkan kon lalu lintas di hadapan kereta Waymo.
Sudah tentu, setakat ini, kita masih jauh untuk menyaksikan fenomena ini direalisasikan sepenuhnya. Tetapi apabila ia berlaku, saya menjangkakan ia menjadi sebahagian besar ramalan. 
Kesan Ekonomi
Apabila kita bercakap tentang pekerjaan, tidak dinafikan bahawa Waymo jelas telah menggantikan kedudukan pemandu.
Tetapi pada masa yang sama, ia juga telah melahirkan banyak pekerjaan yang tidak wujud sebelum ini, dan jawatan ini agak kurang kelihatan - seperti juru anotasi yang mengumpul data latihan untuk rangkaian saraf, kakitangan perkhidmatan pelanggan yang membantu kereta yang bermasalah dari jauh , dan orang yang bertanggungjawab untuk membina dan kakitangan yang menyelenggara armada, dsb.
Yang pertama kali dilahirkan ialah industri penderia yang serba baharu dan infrastruktur berkaitan yang direka untuk membina kereta berteknologi tinggi yang canggih ini.
Sama seperti pandangan umum orang tentang kerja, banyak jawatan akan berubah, ada yang hilang, tetapi banyak yang baru juga akan muncul.
Ini sebenarnya adalah perubahan dalam bentuk kerja, bukannya pengurangan mudah dalam jawatan, walaupun pengurangan dalam jawatan adalah perubahan yang paling intuitif.
Walaupun sukar untuk mengatakan bahawa pekerjaan keseluruhan tidak akan berkurangan dari semasa ke semasa, kadar perubahan jauh lebih perlahan daripada yang dijangkakan.
Persekitaran yang kompetitif
Akhir sekali, saya ingin bercakap tentang persekitaran persaingan dalam bidang pemanduan autonomi.
Beberapa tahun lalu, syarikat kereta pandu sendiri muncul seperti cendawan selepas hujan. Tetapi hari ini, apabila orang ramai secara beransur-ansur menyedari kerumitan teknologi ini (saya secara peribadi percaya bahawa automasi masih sangat sukar berdasarkan kecerdasan buatan dan teknologi pengkomputeran semasa), bidang ini telah mengalami penyatuan berskala besar.
Antaranya, Waymo telah menjadi syarikat pertama yang menunjukkan sepenuhnya masa depan pemanduan autonomi.
Walaupun begitu, masih terdapat beberapa syarikat yang masih mengejar, seperti Cruise, Zoox, dan kegemaran peribadi saya, Tesla.

Saya ingin sebutkan secara ringkas di sini, berdasarkan pengalaman dan penyertaan saya dalam bidang ini. Pada pendapat saya, matlamat utama industri pemanduan autonomi adalah untuk mencapai pemanduan autonomi sepenuhnya pada skala global.
Waymo telah memilih strategi untuk mula-mula merealisasikan pemanduan autonomi dan kemudian berkembang secara global, manakala Tesla mula-mula digunakan secara global dan kemudian secara beransur-ansur meningkatkan teknologi pemanduan autonominya.
Jelas sekali, kedua-dua syarikat ini akan menghadapi pelarasan yang sama sekali berbeza: satu terutamanya mengusahakan perisian, dan satu lagi sedang mengusahakan perkakasan.
Pada masa ini, saya sangat berpuas hati dengan produk mereka secara peribadi, saya penuh dengan sokongan untuk teknologi itu sendiri.

Begitu juga, banyak industri lain juga mungkin melalui fasa pertumbuhan dan pengembangan yang pesat (seperti bidang pemanduan autonomi sekitar 2015), tetapi akhirnya, mungkin hanya terdapat beberapa syarikat dalam persaingan ini Survive.
Dalam proses ini, banyak alat bantu AI praktikal (seperti fungsi L2 ADAS semasa) dan beberapa platform terbuka (seperti Koma) akan digunakan secara meluas.
Artificial General Intelligence (AGI)
Di atas adalah visi umum saya untuk pembangunan Artificial General Intelligence (AGI) pada masa hadapan.
Bayangkan perubahan sedemikian akan merebak ke seluruh ekonomi pada kelajuan yang berbeza, disertai dengan banyak interaksi dan tindak balas berantai yang tidak dapat diramalkan.
Walaupun idea ini mungkin tidak sempurna, saya rasa ia adalah model yang patut diingati dan berguna untuk rujukan.
Dari perspektif memetik, AGI jauh daripada jenis superintelligence yang terlepas daripada kawalan kita, secara rekursif meningkatkan dirinya di alam siber, mencipta patogen atau nanobot yang boleh membawa maut, dan akhirnya mengubah galaksi menjadi kelabu Jauh.

Sebagai perbandingan, ia lebih seperti pembangunan teknologi pemanduan autonomi - teknologi automasi yang berkembang pesat dan boleh mengubah masyarakat. Kepantasan pembangunannya akan dihadkan dalam banyak aspek, termasuk sumber tenaga kerja berpendidikan, maklumat, bahan, tenaga, dan penyeliaan.
Dalam hal ini, masyarakat adalah pemerhati dan peserta.
Dunia tidak akan runtuh, tetapi akan menyesuaikan diri, berubah dan membina semula.
Mengenai pemanduan autonomi itu sendiri, automasi trafik akan meningkatkan keselamatan dengan ketara, bandar akan menjadi lebih segar dan lancar, dan tempat letak kereta serta kereta yang diletakkan di kedua-dua belah jalan akan hilang secara beransur-ansur, meninggalkan lebih banyak ruang.
Saya secara peribadi menantikan semua kemungkinan perubahan yang dibawa oleh kecerdasan am buatan (AGI).
Perbincangan hangat di kalangan netizen
Ringkasnya, Karpathy menganggap AGI lebih seperti pembangunan pemanduan autonomi ini telah mencetuskan perbincangan di kalangan ramai netizen.
"Melihat lelaki yang tidak dapat menghantar FSD memutuskan untuk membandingkan FSD dengan AGI sebenarnya memberi saya keyakinan bahawa kita masih mempunyai beberapa dekad lagi."

Ya, dia seolah-olah terlupa "G". Saya masih ingat Norvig pernah berkata dalam tulisan kecerdasan buatannya beberapa dekad yang lalu bahawa "kecerdasan" tidak bermaksud kemahakuasaan Untuk agen pintar berguna, ia sudah cukup untuk menyelesaikan masalah kecil. Pada pendapat saya, dari sinilah G berasal.
Dan kini tiba-tiba kita kembali kepada definisi sempit sebelum ini? Saya masih tidak melihat laluan dari LLM dan pemanduan autonomi ke AGI.

Sudah tentu, pembangunan AGI mungkin beransur-ansur dan perlahan, sama seperti kita melihat Waymo membina kereta pandu sendiri. Tetapi ini hanyalah salah satu daripada banyak cara dan anda juga boleh melihat AGI muncul dalam cara yang sangat berbeza, seperti dengan menskalakan LLM berskala besar.

Atas ialah kandungan terperinci Pengasas bersama OpenAI Karpathy menerbitkan artikel: Mengambil pemanduan autonomi sebagai contoh untuk menerangkan AGI! Teks asal telah dipadamkan, sila tandai buku itu sekarang. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

AI Hentai Generator
Menjana ai hentai secara percuma.

Artikel Panas
Alat panas

Notepad++7.3.1
Editor kod yang mudah digunakan dan percuma

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

Hantar Studio 13.0.1
Persekitaran pembangunan bersepadu PHP yang berkuasa

Dreamweaver CS6
Alat pembangunan web visual

SublimeText3 versi Mac
Perisian penyuntingan kod peringkat Tuhan (SublimeText3)
Topik panas
 1376
1376
 52
52

 Mengapakah Gaussian Splatting begitu popular dalam pemanduan autonomi sehingga NeRF mula ditinggalkan?
Jan 17, 2024 pm 02:57 PM
Mengapakah Gaussian Splatting begitu popular dalam pemanduan autonomi sehingga NeRF mula ditinggalkan?
Jan 17, 2024 pm 02:57 PM
Ditulis di atas & pemahaman peribadi pengarang Gaussiansplatting tiga dimensi (3DGS) ialah teknologi transformatif yang telah muncul dalam bidang medan sinaran eksplisit dan grafik komputer dalam beberapa tahun kebelakangan ini. Kaedah inovatif ini dicirikan oleh penggunaan berjuta-juta Gaussians 3D, yang sangat berbeza daripada kaedah medan sinaran saraf (NeRF), yang terutamanya menggunakan model berasaskan koordinat tersirat untuk memetakan koordinat spatial kepada nilai piksel. Dengan perwakilan adegan yang eksplisit dan algoritma pemaparan yang boleh dibezakan, 3DGS bukan sahaja menjamin keupayaan pemaparan masa nyata, tetapi juga memperkenalkan tahap kawalan dan pengeditan adegan yang tidak pernah berlaku sebelum ini. Ini meletakkan 3DGS sebagai penukar permainan yang berpotensi untuk pembinaan semula dan perwakilan 3D generasi akan datang. Untuk tujuan ini, kami menyediakan gambaran keseluruhan sistematik tentang perkembangan dan kebimbangan terkini dalam bidang 3DGS buat kali pertama.
 Bagaimana untuk menyelesaikan masalah ekor panjang dalam senario pemanduan autonomi?
Jun 02, 2024 pm 02:44 PM
Bagaimana untuk menyelesaikan masalah ekor panjang dalam senario pemanduan autonomi?
Jun 02, 2024 pm 02:44 PM
Semalam semasa temu bual, saya telah ditanya sama ada saya telah membuat sebarang soalan berkaitan ekor panjang, jadi saya fikir saya akan memberikan ringkasan ringkas. Masalah ekor panjang pemanduan autonomi merujuk kepada kes tepi dalam kenderaan autonomi, iaitu, kemungkinan senario dengan kebarangkalian yang rendah untuk berlaku. Masalah ekor panjang yang dirasakan adalah salah satu sebab utama yang kini mengehadkan domain reka bentuk pengendalian kenderaan autonomi pintar satu kenderaan. Seni bina asas dan kebanyakan isu teknikal pemanduan autonomi telah diselesaikan, dan baki 5% masalah ekor panjang secara beransur-ansur menjadi kunci untuk menyekat pembangunan pemanduan autonomi. Masalah ini termasuk pelbagai senario yang berpecah-belah, situasi yang melampau dan tingkah laku manusia yang tidak dapat diramalkan. "Ekor panjang" senario tepi dalam pemanduan autonomi merujuk kepada kes tepi dalam kenderaan autonomi (AVs) kes Edge adalah senario yang mungkin dengan kebarangkalian yang rendah untuk berlaku. kejadian yang jarang berlaku ini
 Pilih kamera atau lidar? Kajian terbaru tentang mencapai pengesanan objek 3D yang mantap
Jan 26, 2024 am 11:18 AM
Pilih kamera atau lidar? Kajian terbaru tentang mencapai pengesanan objek 3D yang mantap
Jan 26, 2024 am 11:18 AM
0. Ditulis di hadapan&& Pemahaman peribadi bahawa sistem pemanduan autonomi bergantung pada persepsi lanjutan, membuat keputusan dan teknologi kawalan, dengan menggunakan pelbagai penderia (seperti kamera, lidar, radar, dll.) untuk melihat persekitaran sekeliling dan menggunakan algoritma dan model untuk analisis masa nyata dan membuat keputusan. Ini membolehkan kenderaan mengenali papan tanda jalan, mengesan dan menjejaki kenderaan lain, meramalkan tingkah laku pejalan kaki, dsb., dengan itu selamat beroperasi dan menyesuaikan diri dengan persekitaran trafik yang kompleks. Teknologi ini kini menarik perhatian meluas dan dianggap sebagai kawasan pembangunan penting dalam pengangkutan masa depan satu. Tetapi apa yang menyukarkan pemanduan autonomi ialah memikirkan cara membuat kereta itu memahami perkara yang berlaku di sekelilingnya. Ini memerlukan algoritma pengesanan objek tiga dimensi dalam sistem pemanduan autonomi boleh melihat dan menerangkan dengan tepat objek dalam persekitaran sekeliling, termasuk lokasinya,
 Kertas Stable Diffusion 3 akhirnya telah dikeluarkan, dan butiran seni bina didedahkan Adakah ia akan membantu untuk menghasilkan semula Sora?
Mar 06, 2024 pm 05:34 PM
Kertas Stable Diffusion 3 akhirnya telah dikeluarkan, dan butiran seni bina didedahkan Adakah ia akan membantu untuk menghasilkan semula Sora?
Mar 06, 2024 pm 05:34 PM
Kertas StableDiffusion3 akhirnya di sini! Model ini dikeluarkan dua minggu lalu dan menggunakan seni bina DiT (DiffusionTransformer) yang sama seperti Sora. Ia menimbulkan kekecohan apabila ia dikeluarkan. Berbanding dengan versi sebelumnya, kualiti imej yang dijana oleh StableDiffusion3 telah dipertingkatkan dengan ketara Ia kini menyokong gesaan berbilang tema, dan kesan penulisan teks juga telah dipertingkatkan, dan aksara bercelaru tidak lagi muncul. StabilityAI menegaskan bahawa StableDiffusion3 ialah satu siri model dengan saiz parameter antara 800M hingga 8B. Julat parameter ini bermakna model boleh dijalankan terus pada banyak peranti mudah alih, dengan ketara mengurangkan penggunaan AI
 Artikel ini sudah cukup untuk anda membaca tentang pemanduan autonomi dan ramalan trajektori!
Feb 28, 2024 pm 07:20 PM
Artikel ini sudah cukup untuk anda membaca tentang pemanduan autonomi dan ramalan trajektori!
Feb 28, 2024 pm 07:20 PM
Ramalan trajektori memainkan peranan penting dalam pemanduan autonomi Ramalan trajektori pemanduan autonomi merujuk kepada meramalkan trajektori pemanduan masa hadapan kenderaan dengan menganalisis pelbagai data semasa proses pemanduan kenderaan. Sebagai modul teras pemanduan autonomi, kualiti ramalan trajektori adalah penting untuk kawalan perancangan hiliran. Tugas ramalan trajektori mempunyai timbunan teknologi yang kaya dan memerlukan kebiasaan dengan persepsi dinamik/statik pemanduan autonomi, peta ketepatan tinggi, garisan lorong, kemahiran seni bina rangkaian saraf (CNN&GNN&Transformer), dll. Sangat sukar untuk bermula! Ramai peminat berharap untuk memulakan ramalan trajektori secepat mungkin dan mengelakkan perangkap Hari ini saya akan mengambil kira beberapa masalah biasa dan kaedah pembelajaran pengenalan untuk ramalan trajektori! Pengetahuan berkaitan pengenalan 1. Adakah kertas pratonton teratur? A: Tengok survey dulu, hlm
 SIMPL: Penanda aras ramalan gerakan berbilang ejen yang mudah dan cekap untuk pemanduan autonomi
Feb 20, 2024 am 11:48 AM
SIMPL: Penanda aras ramalan gerakan berbilang ejen yang mudah dan cekap untuk pemanduan autonomi
Feb 20, 2024 am 11:48 AM
Tajuk asal: SIMPL: ASimpleandEfficientMulti-agentMotionPredictionBaselineforAutonomousDriving Paper pautan: https://arxiv.org/pdf/2402.02519.pdf Pautan kod: https://github.com/HKUST-Aerial-Robotics/SIMPL Unit pengarang: Universiti Sains Hong Kong dan Teknologi Idea Kertas DJI: Kertas kerja ini mencadangkan garis dasar ramalan pergerakan (SIMPL) yang mudah dan cekap untuk kenderaan autonomi. Berbanding dengan agen-sen tradisional
 SOTA terbaharu nuScenes |. SparseAD: Pertanyaan jarang membantu pemanduan autonomi hujung ke hujung yang cekap!
Apr 17, 2024 pm 06:22 PM
SOTA terbaharu nuScenes |. SparseAD: Pertanyaan jarang membantu pemanduan autonomi hujung ke hujung yang cekap!
Apr 17, 2024 pm 06:22 PM
Ditulis di hadapan & titik permulaan Paradigma hujung ke hujung menggunakan rangka kerja bersatu untuk mencapai pelbagai tugas dalam sistem pemanduan autonomi. Walaupun kesederhanaan dan kejelasan paradigma ini, prestasi kaedah pemanduan autonomi hujung ke hujung pada subtugas masih jauh ketinggalan berbanding kaedah tugasan tunggal. Pada masa yang sama, ciri pandangan mata burung (BEV) padat yang digunakan secara meluas dalam kaedah hujung ke hujung sebelum ini menyukarkan untuk membuat skala kepada lebih banyak modaliti atau tugasan. Paradigma pemanduan autonomi hujung ke hujung (SparseAD) tertumpu carian jarang dicadangkan di sini, di mana carian jarang mewakili sepenuhnya keseluruhan senario pemanduan, termasuk ruang, masa dan tugas, tanpa sebarang perwakilan BEV yang padat. Khususnya, seni bina jarang bersatu direka bentuk untuk kesedaran tugas termasuk pengesanan, penjejakan dan pemetaan dalam talian. Di samping itu, berat
 Mari kita bincangkan tentang sistem pemanduan autonomi hujung ke hujung dan generasi seterusnya, serta beberapa salah faham tentang pemanduan autonomi hujung ke hujung?
Apr 15, 2024 pm 04:13 PM
Mari kita bincangkan tentang sistem pemanduan autonomi hujung ke hujung dan generasi seterusnya, serta beberapa salah faham tentang pemanduan autonomi hujung ke hujung?
Apr 15, 2024 pm 04:13 PM
Pada bulan lalu, atas sebab-sebab yang diketahui umum, saya telah mengadakan pertukaran yang sangat intensif dengan pelbagai guru dan rakan sekelas dalam industri. Topik yang tidak dapat dielakkan dalam pertukaran secara semula jadi adalah hujung ke hujung dan Tesla FSDV12 yang popular. Saya ingin mengambil kesempatan ini untuk menyelesaikan beberapa buah fikiran dan pendapat saya pada masa ini untuk rujukan dan perbincangan anda. Bagaimana untuk mentakrifkan sistem pemanduan autonomi hujung ke hujung, dan apakah masalah yang sepatutnya dijangka diselesaikan hujung ke hujung? Menurut definisi yang paling tradisional, sistem hujung ke hujung merujuk kepada sistem yang memasukkan maklumat mentah daripada penderia dan secara langsung mengeluarkan pembolehubah yang membimbangkan tugas. Sebagai contoh, dalam pengecaman imej, CNN boleh dipanggil hujung-ke-hujung berbanding kaedah pengekstrak ciri + pengelas tradisional. Dalam tugas pemanduan autonomi, masukkan data daripada pelbagai penderia (kamera/LiDAR
