- Pautan kertas: https://arxiv.org/pdf/2401.13172.pdf
- Pautan kod: https://github.com/hht1996ok/ADMap
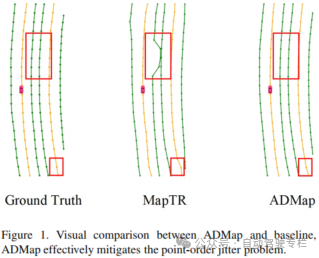
pengenalan kepada artikel ini ADMap, rangka kerja anti-gangguan untuk membina semula peta berketepatan tinggi vektor dalam talian. Dalam bidang pemanduan autonomi, pembinaan semula peta berketepatan tinggi dalam talian adalah penting untuk tugas perancangan. Dalam beberapa tahun kebelakangan ini, pelbagai model pembinaan semula peta ketepatan tinggi berprestasi tinggi telah dibangunkan untuk memenuhi permintaan ini. Walau bagaimanapun, disebabkan bias ramalan, jujukan titik dalam vektor contoh mungkin kelihatan bergelombang atau bergerigi, yang akan menjejaskan tugasan berikutnya. Untuk tujuan ini, kertas kerja ini mencadangkan rangka kerja pembinaan semula peta anti-gangguan ADMap.
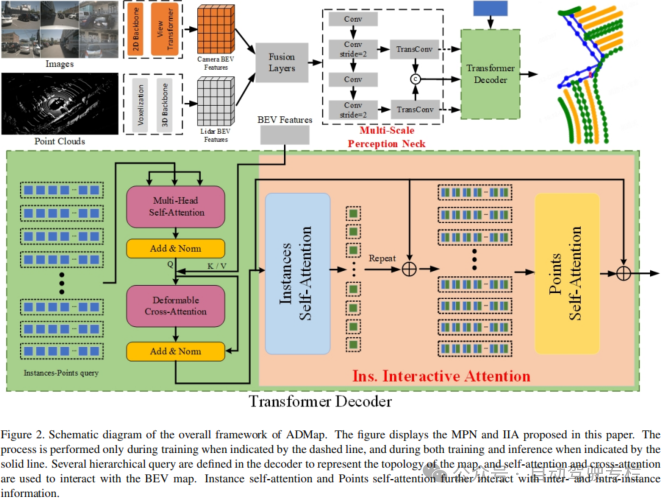
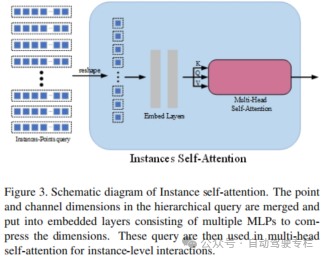
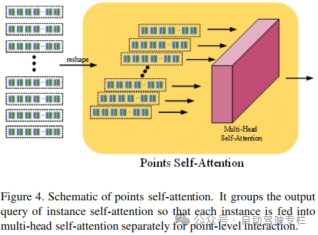
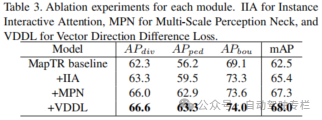
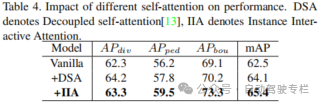
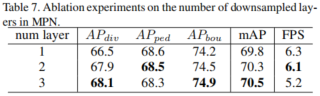
Rangka kerja ADMap terdiri daripada tiga modul, iaitu multi-scale perceptual neck (MPN), instance interactive attention (IIA) dan vector direction difference loss (VDDL). Dengan meneroka perhubungan susunan titik antara kejadian dan dalam keadaan secara berlatarkan, model ini boleh memantau proses ramalan susunan titik dengan lebih berkesan, dengan itu mengurangkan masalah kegelisahan susunan titik.
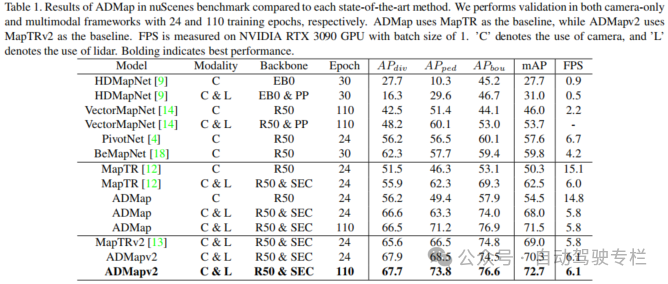
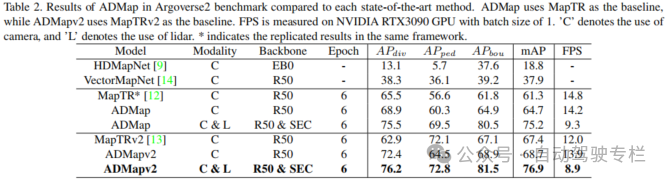
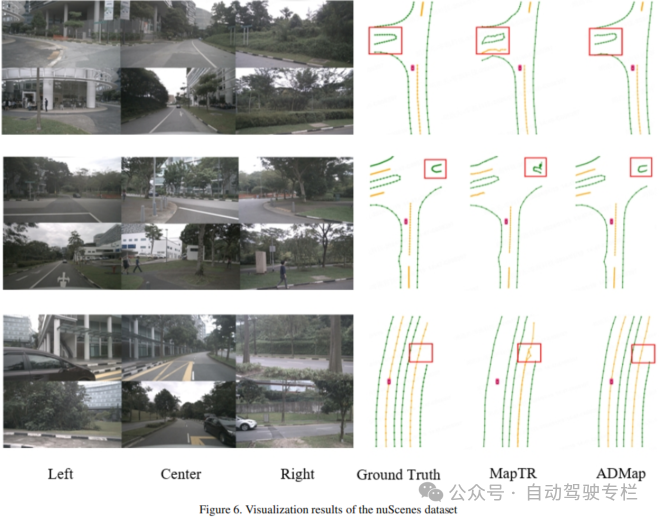
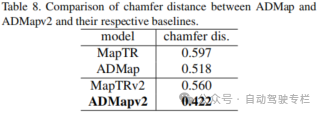
Eksperimen menunjukkan bahawa ADMap mencapai prestasi terkini pada set data nuScenes dan Argoverse2. Sebilangan besar keputusan menunjukkan bahawa ADMap boleh menjana elemen peta yang stabil dan boleh dipercayai dalam senario pemanduan yang kompleks dan boleh diubah. Ini penting untuk keselamatan dan ketepatan sistem pemanduan autonomi.
Ringkasnya, ADMap ialah rangka kerja pembinaan semula peta anti-gangguan inovatif yang boleh menyelesaikan masalah jitter susunan titik secara berkesan dan menunjukkan prestasi cemerlang pada set data sebenar. Penyelidikan ini amat penting dalam menggalakkan pembangunan teknologi pemanduan autonomi.
Sumbangan Utama
Sumbangan artikel ini adalah seperti berikut:
1) Artikel ini mencadangkan ADMap hujung ke hujung, yang boleh membina semula peta ketepatan tinggi vektor yang lebih stabil MPN tidak meningkatkan sumber pengkomputeran mengikut kaedah, yang boleh menangkap maklumat berbilang skala dengan lebih tepat. IIA secara berkesan merealisasikan interaksi maklumat antara kejadian dan dalam keadaan, dengan itu mengurangkan masalah mengimbangi kedudukan titik contoh. Selain itu, VDDL menggunakan maklumat topologi untuk menyelia proses pembinaan semula kedudukan tertib titik dan model perbezaan arah vektor.
3) ADMap mampu membina semula peta berketepatan tinggi bervektor dalam masa nyata dan mencapai prestasi terbaik dalam penanda aras nuScenes dan Argoverse2.
Gambar dan meja kertas


Summary
admap adalah rangka kerja rekonstruksi peta ketepatan tinggi yang berkesan dan cekap, yang secara berkesan menggunakan tiga modul leher persepsi pelbagai skala, perhatian interaksi contoh dan kehilangan arah vektor herotan topologi peta yang disebabkan oleh jitter titik contoh. Sebilangan besar percubaan menunjukkan bahawa kaedah yang dicadangkan dalam artikel ini boleh mencapai prestasi terbaik pada penanda aras nuScenes dan Argoverse2, dan kecekapannya juga telah disahkan. Kami percaya bahawa ADMap boleh membantu komuniti mempromosikan penyelidikan tentang tugas pembinaan semula peta berketepatan tinggi yang divektorkan untuk membangunkan bidang seperti pemanduan autonomi dengan lebih baik.

Pautan asal: https://mp.weixin.qq.com/s/O0BoiJZwIQmeeChUZkMMng
Atas ialah kandungan terperinci Rangka kerja anti-gangguan ADMap: alat yang berkuasa untuk membina semula peta ketepatan tinggi vektor dalam talian. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!


















![[Web front-end] Permulaan pantas Node.js](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



