

Sedikit tentang pelaksanaan garis lorong BEV

Sebiji benih telah ditanam pada tahun 2021
Pelajar yang telah membaca cerita halangan BEV harus tahu bahawa kumpulan kami mula membuat halangan BEV sekitar 21 Oktober. Pada masa itu, saya tidak berani berfikir untuk melakukan penandaan lorong BEV kerana tiada tenaga kerja. Tetapi saya masih ingat bahawa sekitar bulan Disember, kami bertemu dengan seorang calon Semasa temu duga, kami mendengar bahawa mereka telah bekerja pada penanda lorong BEV selama lebih daripada setengah tahun Keseluruhan laluan teknikal digunakan sebagai rangkaian penandaan lorong BEV. peta ketepatan Latih nilai sebenar dan katakan bahawa kesannya tidak buruk. Malangnya, calon itu tidak datang kepada kami akhirnya. Digabungkan dengan kandungan tanda lorong yang diajar pada hari Telsa AI pada tahun 2021, benih pembuatan tanda lorong BEV telah ditanam dalam kumpulan. . Tetapi pada masa itu, hanya ada seorang rakan sekelas dalam kumpulan kami (mari panggil dia Xiaoxuan buat masa ini) yang mempunyai 2 bulan untuk melakukan ini. Kemudian benih 2021 mula bercambah Kami akan bermula dengan data Pelajar Xiaoxuan masih sangat baik mengekstrak data garisan lorong di sekeliling kereta yang sepadan melalui peta berketepatan tinggi berkelajuan tinggi. Apabila ia dibuat, saya ingat semua orang masih sangat teruja.
Rajah 1: Kesan garis lorong peta berketepatan tinggi yang ditayangkan pada sistem imejSeperti yang anda boleh lihat daripada Rajah 1, masih terdapat beberapa masalah dengan pasangan pemasangan, jadi Xiaoxuan membuat satu siri pengoptimuman. Dua bulan kemudian, Xiaoxuan pergi untuk melakukan tugas lain. Melihat ke belakang sekarang, kami telah mengambil langkah yang betul dalam meneroka laluan lorong BEV. Kerana pada tahun 2021 dan 22, banyak kertas dan kod baris lorong BEV yang sangat baik telah dibuka secara beransur-ansur. Melihat ini, anda mungkin berfikir bahawa mesti ada cerita yang sempurna tentang pelaksanaan garis lorong BEV pada tahun 2023. Walau bagaimanapun, cita-cita selalunya sangat memuaskan, tetapi realitinya sangat kejam.
Kerana halangan BEV kami telah membuktikan bahawa BEV boleh melalui jalan ini, dan ia juga telah menunjukkan keputusan yang baik dalam ujian jalan raya. Kumpulan itu mula mempunyai lebih banyak sumber untuk mempertimbangkan garis lorong Ambil perhatian bahawa ini bukan BEV. kenapa? Kerana pada masa ini, kami menghadapi banyak tekanan untuk pergi ke dalam talian, dan kami tidak mempunyai pengalaman yang mencukupi dalam laluan lorong BEV Dalam erti kata lain, hampir tiada orang dalam keseluruhan kumpulan yang telah membuat pengeluaran besar-besaran baris lorong 2D . Pada separuh pertama tahun 2023, ia benar-benar boleh digambarkan sebagai tersandung Kami mempunyai banyak perbincangan hangat secara dalaman, dan akhirnya memutuskan untuk membentuk dua baris, salah satunya ialah garisan lorong 2D: kebanyakan tenaga kerja berada di garisan lorong 2D, dan tumpuan adalah pada barisan lorong 2D, model ringan dan pengumpulan pengalaman pengeluaran besar-besaran pasca pemprosesan barisan melalui barisan lorong 2D. Satu baris ialah barisan lorong BEV: hanya terdapat sebilangan kecil tenaga kerja (sebenarnya hanya 1-2 tenaga kerja), memfokuskan pada reka bentuk model baris lorong BEV dan pengalaman model terkumpul. Sudah terdapat banyak rangkaian penanda lorong BEV Saya akan siarkan dua kertas kerja yang memberi impak yang lebih besar kepada kami di sini untuk rujukan anda. "HDMapNet: Rangka Kerja Pembinaan dan Penilaian Peta HD Dalam Talian" dan "MapTR: Pemodelan Berstruktur dan Pembelajaran untuk Pembinaan Peta HD Vektor Dalam Talian"
Rajah 2: HDMapNet
tely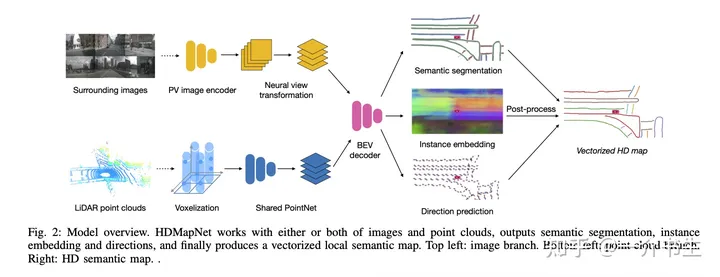
Walau bagaimanapun, cerita selalunya mempunyai liku-liku Kami hanya boleh menggunakan peta berketepatan tinggi berkelajuan tinggi untuk menghasilkan data garisan lorong. Apa yang perlu dilakukan tentang bandar ini? Masih banyak kes buruk yang perlu diselesaikan. Pada masa ini, orang penting akhirnya akan muncul. Mari kita panggil dia Rakan Sekelas Xiaotang (pengurus besar kumpulan data kita). Xiaotang dan yang lain menggunakan pembinaan semula awan titik untuk membina semula klip untuk kami (Proses ini agak menyakitkan. Saya ingat dua bulan itu adalah masa yang paling tertekan bagi mereka, haha. Sudah tentu, saya dan Xiaotang sering jatuh cinta dan membunuh masing-masing Lagipun, saya sering mengatakan bahawa tiada data lagi semasa mesyuarat ). Kemudian bagaimana untuk melabel selepas pembinaan semula. Melihat kepada pembekal pada masa itu, tiada seorang pun daripada mereka mempunyai alat pelabelan sedemikian, apatah lagi pengalaman pelabelan. Bersama Xiaotang dan yang lain, selepas sebulan yang panjang, alat anotasi akhirnya digilap dengan pembekal. (Kami sering bergurau bahawa kami memperkasakan keseluruhan industri anotasi memandu sendiri. Proses ini benar-benar menyakitkan, dan membina semula klip benar-benar lambat untuk dimuatkan). Walau bagaimanapun, keseluruhan pelabelan masih agak perlahan atau mahal Pada masa ini, Xiaoxuan membuat penampilan sulungnya dengan model besar pra-pelabelan garis lorong (kesan model besar pra-pelabelan garis lorong masih cemerlang), dan semua orang. memandangnya dengan penuh kehairanan. Selepas set gabungan ini, pengeluaran data baris lorong kami akhirnya hampir siap. Pada bulan Ogos, garisan lorong kawalan laluan BEV kami telah diulang dengan baik, yang sesuai untuk fungsi pemanduan berkelajuan tinggi yang ringkas. Kini Xiaoxuan masih memberikan kami lebih banyak kejutan ke arah model besar yang telah ditanda kami dan Xiaotang masih bercinta dan membunuh antara satu sama lain.
Walau bagaimanapun, tiada cerita berakhir dengan begitu mudah Pada bulan September, kami mula mengusahakan model pra-gabungan berbilang modal (Lidar, kamera, Radar) dan berbilang tugas (garisan lorong, halangan, Occ), dan seterusnya akan menyokong Navigasi bandar. Kuasa (NCP) adalah penyelesaian yang dipanggil yang menekankan persepsi dan mengabaikan peta. Berdasarkan pengalaman halangan BEV dan laluan lorong BEV, kami akan menggunakan rangkaian tertumpu pada kenderaan tidak lama lagi, mungkin menjelang akhir September. Banyak subtugas juga telah ditambahkan pada garisan lorong, seperti pengecaman tanda jalan, topologi persimpangan, dsb. Dalam proses ini, kami menaik taraf pasca pemprosesan garis lorong BEV, meninggalkan pemasangan spline padu garis lorong dan menggunakan skema penjejakan titik Keluaran skema penjejakan titik dan model garis lorong kami boleh menjadi gabungan yang baik. Proses ini juga menyakitkan. Kami mengadakan mesyuarat khas sekali seminggu selama 2 bulan berturut-turut. Lagipun, kami telah melakukan dengan baik berdasarkan rancangan yang sesuai, tetapi untuk mencapai had yang lebih tinggi, kami hanya boleh mengalami kesakitan dan kebahagiaan. Akhirnya, kami telah meletakkan fungsi asas ke dalam ujian jalan raya.
Biar saya terangkan secara ringkas Gambar 4 kepada anda Bahagian kiri adalah kesan penjejakan titik garisan pada masa ini, julat persepsi model kami hanya 80 meter yang pertama. yang ditinggalkan oleh penjejakan. Di sebelah kanan ialah peta persepsi masa nyata yang kami sediakan. Sudah tentu, ia masih dalam proses lelaran yang pantas, dan masih terdapat banyak masalah yang sedang diselesaikan.
24 adalah permulaan baru
Berdiri dalam 24 tahun, saya melihat kembali pertumbuhan dan pengumpulan kami dari 21 hingga sekarang Saya juga sangat bertuah kerana mempunyai sekumpulan orang yang berfikiran sama melengkapi antara satu sama lain. Dalam tempoh 24 tahun, terdapat banyak perkara yang perlu kami kejar, termasuk pengeluaran besar-besaran model pra-gabungan, usaha ke arah data, penerokaan model pemasaan, imaginasi hujung ke hujung, dsb.
Atas ialah kandungan terperinci Sedikit tentang pelaksanaan garis lorong BEV. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

Video Face Swap
Tukar muka dalam mana-mana video dengan mudah menggunakan alat tukar muka AI percuma kami!

Artikel Panas
Alat panas

Notepad++7.3.1
Editor kod yang mudah digunakan dan percuma

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

Hantar Studio 13.0.1
Persekitaran pembangunan bersepadu PHP yang berkuasa

Dreamweaver CS6
Alat pembangunan web visual

SublimeText3 versi Mac
Perisian penyuntingan kod peringkat Tuhan (SublimeText3)
Topik panas
 1393
1393
 52
1207
24
52
1207
24

 Mengapakah Gaussian Splatting begitu popular dalam pemanduan autonomi sehingga NeRF mula ditinggalkan?
Jan 17, 2024 pm 02:57 PM
Mengapakah Gaussian Splatting begitu popular dalam pemanduan autonomi sehingga NeRF mula ditinggalkan?
Jan 17, 2024 pm 02:57 PM
Ditulis di atas & pemahaman peribadi pengarang Gaussiansplatting tiga dimensi (3DGS) ialah teknologi transformatif yang telah muncul dalam bidang medan sinaran eksplisit dan grafik komputer dalam beberapa tahun kebelakangan ini. Kaedah inovatif ini dicirikan oleh penggunaan berjuta-juta Gaussians 3D, yang sangat berbeza daripada kaedah medan sinaran saraf (NeRF), yang terutamanya menggunakan model berasaskan koordinat tersirat untuk memetakan koordinat spatial kepada nilai piksel. Dengan perwakilan adegan yang eksplisit dan algoritma pemaparan yang boleh dibezakan, 3DGS bukan sahaja menjamin keupayaan pemaparan masa nyata, tetapi juga memperkenalkan tahap kawalan dan pengeditan adegan yang tidak pernah berlaku sebelum ini. Ini meletakkan 3DGS sebagai penukar permainan yang berpotensi untuk pembinaan semula dan perwakilan 3D generasi akan datang. Untuk tujuan ini, kami menyediakan gambaran keseluruhan sistematik tentang perkembangan dan kebimbangan terkini dalam bidang 3DGS buat kali pertama.
 Bagaimana untuk menyelesaikan masalah ekor panjang dalam senario pemanduan autonomi?
Jun 02, 2024 pm 02:44 PM
Bagaimana untuk menyelesaikan masalah ekor panjang dalam senario pemanduan autonomi?
Jun 02, 2024 pm 02:44 PM
Semalam semasa temu bual, saya telah ditanya sama ada saya telah membuat sebarang soalan berkaitan ekor panjang, jadi saya fikir saya akan memberikan ringkasan ringkas. Masalah ekor panjang pemanduan autonomi merujuk kepada kes tepi dalam kenderaan autonomi, iaitu, kemungkinan senario dengan kebarangkalian yang rendah untuk berlaku. Masalah ekor panjang yang dirasakan adalah salah satu sebab utama yang kini mengehadkan domain reka bentuk pengendalian kenderaan autonomi pintar satu kenderaan. Seni bina asas dan kebanyakan isu teknikal pemanduan autonomi telah diselesaikan, dan baki 5% masalah ekor panjang secara beransur-ansur menjadi kunci untuk menyekat pembangunan pemanduan autonomi. Masalah ini termasuk pelbagai senario yang berpecah-belah, situasi yang melampau dan tingkah laku manusia yang tidak dapat diramalkan. "Ekor panjang" senario tepi dalam pemanduan autonomi merujuk kepada kes tepi dalam kenderaan autonomi (AVs) kes Edge adalah senario yang mungkin dengan kebarangkalian yang rendah untuk berlaku. kejadian yang jarang berlaku ini
 Pilih kamera atau lidar? Kajian terbaru tentang mencapai pengesanan objek 3D yang mantap
Jan 26, 2024 am 11:18 AM
Pilih kamera atau lidar? Kajian terbaru tentang mencapai pengesanan objek 3D yang mantap
Jan 26, 2024 am 11:18 AM
0. Ditulis di hadapan&& Pemahaman peribadi bahawa sistem pemanduan autonomi bergantung pada persepsi lanjutan, membuat keputusan dan teknologi kawalan, dengan menggunakan pelbagai penderia (seperti kamera, lidar, radar, dll.) untuk melihat persekitaran sekeliling dan menggunakan algoritma dan model untuk analisis masa nyata dan membuat keputusan. Ini membolehkan kenderaan mengenali papan tanda jalan, mengesan dan menjejaki kenderaan lain, meramalkan tingkah laku pejalan kaki, dsb., dengan itu selamat beroperasi dan menyesuaikan diri dengan persekitaran trafik yang kompleks. Teknologi ini kini menarik perhatian meluas dan dianggap sebagai kawasan pembangunan penting dalam pengangkutan masa depan satu. Tetapi apa yang menyukarkan pemanduan autonomi ialah memikirkan cara membuat kereta itu memahami perkara yang berlaku di sekelilingnya. Ini memerlukan algoritma pengesanan objek tiga dimensi dalam sistem pemanduan autonomi boleh melihat dan menerangkan dengan tepat objek dalam persekitaran sekeliling, termasuk lokasinya,
 Adakah anda benar-benar menguasai penukaran sistem koordinat? Isu berbilang sensor yang tidak dapat dipisahkan daripada pemanduan autonomi
Oct 12, 2023 am 11:21 AM
Adakah anda benar-benar menguasai penukaran sistem koordinat? Isu berbilang sensor yang tidak dapat dipisahkan daripada pemanduan autonomi
Oct 12, 2023 am 11:21 AM
Artikel perintis dan utama pertama terutamanya memperkenalkan beberapa sistem koordinat yang biasa digunakan dalam teknologi pemanduan autonomi, dan cara melengkapkan korelasi dan penukaran antara mereka, dan akhirnya membina model persekitaran bersatu. Fokus di sini adalah untuk memahami penukaran daripada kenderaan kepada badan tegar kamera (parameter luaran), penukaran kamera kepada imej (parameter dalaman) dan penukaran unit imej kepada piksel. Penukaran daripada 3D kepada 2D akan mempunyai herotan, terjemahan, dsb. Perkara utama: Sistem koordinat kenderaan dan sistem koordinat badan kamera perlu ditulis semula: sistem koordinat satah dan sistem koordinat piksel Kesukaran: herotan imej mesti dipertimbangkan Kedua-dua penyahherotan dan penambahan herotan diberi pampasan pada satah imej. 2. Pengenalan Terdapat empat sistem penglihatan secara keseluruhannya: sistem koordinat satah piksel (u, v), sistem koordinat imej (x, y), sistem koordinat kamera () dan sistem koordinat dunia (). Terdapat hubungan antara setiap sistem koordinat,
 Artikel ini sudah cukup untuk anda membaca tentang pemanduan autonomi dan ramalan trajektori!
Feb 28, 2024 pm 07:20 PM
Artikel ini sudah cukup untuk anda membaca tentang pemanduan autonomi dan ramalan trajektori!
Feb 28, 2024 pm 07:20 PM
Ramalan trajektori memainkan peranan penting dalam pemanduan autonomi Ramalan trajektori pemanduan autonomi merujuk kepada meramalkan trajektori pemanduan masa hadapan kenderaan dengan menganalisis pelbagai data semasa proses pemanduan kenderaan. Sebagai modul teras pemanduan autonomi, kualiti ramalan trajektori adalah penting untuk kawalan perancangan hiliran. Tugas ramalan trajektori mempunyai timbunan teknologi yang kaya dan memerlukan kebiasaan dengan persepsi dinamik/statik pemanduan autonomi, peta ketepatan tinggi, garisan lorong, kemahiran seni bina rangkaian saraf (CNN&GNN&Transformer), dll. Sangat sukar untuk bermula! Ramai peminat berharap untuk memulakan ramalan trajektori secepat mungkin dan mengelakkan perangkap Hari ini saya akan mengambil kira beberapa masalah biasa dan kaedah pembelajaran pengenalan untuk ramalan trajektori! Pengetahuan berkaitan pengenalan 1. Adakah kertas pratonton teratur? A: Tengok survey dulu, hlm
 Mari kita bincangkan tentang sistem pemanduan autonomi hujung ke hujung dan generasi seterusnya, serta beberapa salah faham tentang pemanduan autonomi hujung ke hujung?
Apr 15, 2024 pm 04:13 PM
Mari kita bincangkan tentang sistem pemanduan autonomi hujung ke hujung dan generasi seterusnya, serta beberapa salah faham tentang pemanduan autonomi hujung ke hujung?
Apr 15, 2024 pm 04:13 PM
Pada bulan lalu, atas sebab-sebab yang diketahui umum, saya telah mengadakan pertukaran yang sangat intensif dengan pelbagai guru dan rakan sekelas dalam industri. Topik yang tidak dapat dielakkan dalam pertukaran secara semula jadi adalah hujung ke hujung dan Tesla FSDV12 yang popular. Saya ingin mengambil kesempatan ini untuk menyelesaikan beberapa buah fikiran dan pendapat saya pada masa ini untuk rujukan dan perbincangan anda. Bagaimana untuk mentakrifkan sistem pemanduan autonomi hujung ke hujung, dan apakah masalah yang sepatutnya dijangka diselesaikan hujung ke hujung? Menurut definisi yang paling tradisional, sistem hujung ke hujung merujuk kepada sistem yang memasukkan maklumat mentah daripada penderia dan secara langsung mengeluarkan pembolehubah yang membimbangkan tugas. Sebagai contoh, dalam pengecaman imej, CNN boleh dipanggil hujung-ke-hujung berbanding kaedah pengekstrak ciri + pengelas tradisional. Dalam tugas pemanduan autonomi, masukkan data daripada pelbagai penderia (kamera/LiDAR
 SIMPL: Penanda aras ramalan gerakan berbilang ejen yang mudah dan cekap untuk pemanduan autonomi
Feb 20, 2024 am 11:48 AM
SIMPL: Penanda aras ramalan gerakan berbilang ejen yang mudah dan cekap untuk pemanduan autonomi
Feb 20, 2024 am 11:48 AM
Tajuk asal: SIMPL: ASimpleandEfficientMulti-agentMotionPredictionBaselineforAutonomousDriving Paper pautan: https://arxiv.org/pdf/2402.02519.pdf Pautan kod: https://github.com/HKUST-Aerial-Robotics/SIMPL Unit pengarang: Universiti Sains Hong Kong dan Teknologi Idea Kertas DJI: Kertas kerja ini mencadangkan garis dasar ramalan pergerakan (SIMPL) yang mudah dan cekap untuk kenderaan autonomi. Berbanding dengan agen-sen tradisional
 FisheyeDetNet: algoritma pengesanan sasaran pertama berdasarkan kamera fisheye
Apr 26, 2024 am 11:37 AM
FisheyeDetNet: algoritma pengesanan sasaran pertama berdasarkan kamera fisheye
Apr 26, 2024 am 11:37 AM
Pengesanan objek ialah masalah yang agak matang dalam sistem pemanduan autonomi, antaranya pengesanan pejalan kaki adalah salah satu algoritma terawal untuk digunakan. Penyelidikan yang sangat komprehensif telah dijalankan dalam kebanyakan kertas kerja. Walau bagaimanapun, persepsi jarak menggunakan kamera fisheye untuk pandangan sekeliling agak kurang dikaji. Disebabkan herotan jejari yang besar, perwakilan kotak sempadan standard sukar dilaksanakan dalam kamera fisheye. Untuk mengurangkan perihalan di atas, kami meneroka kotak sempadan lanjutan, elips dan reka bentuk poligon am ke dalam perwakilan kutub/sudut dan mentakrifkan metrik mIOU pembahagian contoh untuk menganalisis perwakilan ini. Model fisheyeDetNet yang dicadangkan dengan bentuk poligon mengatasi model lain dan pada masa yang sama mencapai 49.5% mAP pada set data kamera fisheye Valeo untuk pemanduan autonomi
