
 Peranti teknologi
AI
Adakah kenderaan sendiri menyatakan semua yang anda perlukan untuk pemanduan autonomi hujung ke hujung gelung terbuka?
Peranti teknologi
AI
Adakah kenderaan sendiri menyatakan semua yang anda perlukan untuk pemanduan autonomi hujung ke hujung gelung terbuka?
Adakah kenderaan sendiri menyatakan semua yang anda perlukan untuk pemanduan autonomi hujung ke hujung gelung terbuka?

Tajuk asal: Adakah Status Ego Semua yang Anda Perlukan untuk Pemanduan Autonomi Hujung-ke-Hujung Gelung Terbuka?
Pautan kertas: https://arxiv.org/abs/2312.03031
Pautan kod: https://github. com/NVlabs/BEV-Planner
Gabungan pengarang: Universiti Nanjing NVIDIA

Idea tesis:
Pemandu autonomi hujung ke hujung baru-baru ini muncul sebagai hala tuju penyelidikan yang menjanjikan, bertujuan penuh automasi perspektif. Sepanjang garis ini, banyak kerja baru-baru ini mengikuti tetapan penilaian gelung terbuka untuk mengkaji tingkah laku perancangan pada nuScenes. Artikel ini meneroka isu ini dengan lebih mendalam dengan menjalankan analisis menyeluruh dan mendedahkan teka-teki dengan lebih terperinci. Kertas kerja ini pada mulanya memerhatikan bahawa set data nuScenes, yang menampilkan adegan pemanduan yang agak mudah, membawa kepada kurang penggunaan maklumat persepsi dalam model hujung ke hujung yang menyepadukan status ego, seperti kelajuan ego. Model ini cenderung bergantung terutamanya pada keadaan kenderaan sendiri untuk perancangan laluan masa hadapan. Sebagai tambahan kepada had set data, kertas itu menyatakan bahawa penunjuk semasa tidak memberikan penilaian menyeluruh tentang kualiti perancangan, yang membawa kepada kesimpulan yang berpotensi berat sebelah yang diambil daripada penanda aras sedia ada. Untuk menyelesaikan masalah ini, kertas kerja ini memperkenalkan metrik baharu untuk menilai sama ada trajektori yang diramalkan mengikut jalan. Kertas kerja ini seterusnya mencadangkan garis asas mudah yang mampu mencapai keputusan kompetitif tanpa bergantung pada anotasi persepsi. Memandangkan batasan penanda aras dan metrik sedia ada, artikel ini mengesyorkan agar komuniti akademik menilai semula penyelidikan arus perdana yang berkaitan dan mempertimbangkan dengan teliti sama ada usaha berterusan terhadap teknologi terkini akan menghasilkan kesimpulan umum yang meyakinkan.
Sumbangan utama:
Model pemanduan autonomi gelung terbuka berdasarkan nuScenes dipengaruhi dengan ketara oleh keadaan kenderaan sendiri (kelajuan, pecutan, sudut yaw), dan faktor ini memainkan peranan penting dalam prestasi perancangan. Apabila keadaan kenderaan sendiri terlibat, ramalan trajektori model dikawal terutamanya olehnya, yang boleh menyebabkan pengurangan penggunaan maklumat deria.
Metrik perancangan sedia ada mungkin tidak menilai sepenuhnya prestasi sebenar model. Mungkin terdapat perbezaan yang ketara dalam keputusan penilaian model di bawah penunjuk yang berbeza. Oleh itu, adalah disyorkan untuk memperkenalkan penunjuk yang lebih pelbagai dan komprehensif untuk menilai prestasi model untuk mengelakkan model hanya berprestasi baik di bawah penunjuk tertentu dan mengabaikan potensi risiko lain.
Berbanding dengan mencapai prestasi terkini pada set data nuScenes sedia ada, membangunkan set data dan metrik yang lebih sesuai dianggap sebagai cabaran yang lebih kritikal dan mendesak.
Reka bentuk tesis:
Matlamat pemanduan autonomi hujung-ke-hujung adalah untuk mempertimbangkan persepsi dan perancangan secara menyeluruh serta melaksanakannya dalam susunan penuh [1, 5, 32, 35]. Motivasi asas adalah untuk melihat persepsi kenderaan autonomi (AV) sebagai cara untuk mencapai matlamat (perancangan), dan bukannya terlalu bergantung pada beberapa metrik persepsi untuk disesuaikan.
Tidak seperti persepsi, perancangan biasanya lebih terbuka dan sukar untuk diukur [6, 7]. Sebaik-baiknya, sifat perancangan terbuka akan menyokong persediaan penilaian gelung tertutup di mana ejen lain boleh bertindak balas terhadap tingkah laku kenderaan sendiri dan data sensor mentah boleh berubah dengan sewajarnya. Walau bagaimanapun, pemodelan tingkah laku ejen dan simulasi data dunia sebenar [8, 19] dalam simulator gelung tertutup kekal mencabar masalah yang tidak dapat diselesaikan setakat ini. Oleh itu, penilaian gelung tertutup pasti memperkenalkan jurang domain yang besar dari dunia sebenar.
Sebaliknya, penilaian gelung terbuka bertujuan untuk menganggap pemanduan manusia sebagai situasi sebenar dan merumuskan perancangan sebagai pembelajaran tiruan [13]. Perwakilan ini membenarkan penggunaan langsung set data dunia nyata melalui main semula log mudah, mengelakkan jurang domain daripada simulasi. Ia juga memberikan kelebihan lain, seperti keupayaan untuk melatih dan mengesahkan model dalam senario trafik yang kompleks dan pelbagai yang selalunya sukar untuk dijana dengan kesetiaan yang tinggi dalam simulasi [5]. Disebabkan faedah ini, kawasan penyelidikan yang mantap memfokuskan pada pemanduan autonomi hujung-ke-hujung gelung terbuka menggunakan set data dunia sebenar [2, 12, 13, 16, 43].
Kaedah pemanduan autonomi hujung ke hujung yang popular pada masa ini [12, 13, 16, 43] biasanya menggunakan nuScenes[2] untuk penilaian gelung terbuka terhadap gelagat perancangan mereka. Sebagai contoh, UniAD [13] mengkaji kesan modul tugas persepsi yang berbeza terhadap tingkah laku perancangan akhir. Walau bagaimanapun, ADMLP [45] baru-baru ini menegaskan bahawa rangkaian MLP yang mudah juga boleh mencapai hasil perancangan terkini dengan hanya bergantung pada maklumat status ego. Perkara ini memberi inspirasi kepada artikel ini untuk menimbulkan persoalan penting:
Adakah pemanduan autonomi hujung ke hujung gelung terbuka hanya memerlukan maklumat status ego?
Jawapan untuk artikel ini adalah ya dan tidak, dengan mengambil kira kebaikan dan keburukan menggunakan maklumat status ego dalam penanda aras semasa:
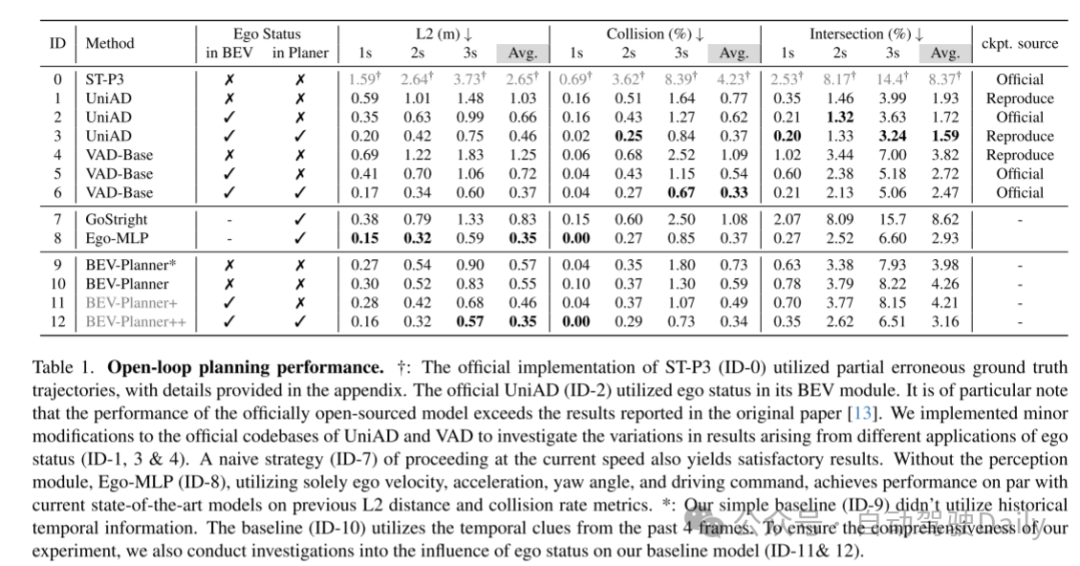
Ya. Maklumat dalam status ego, seperti kelajuan, pecutan dan sudut yaw, jelas akan memberi manfaat kepada pelaksanaan tugas perancangan. Untuk mengesahkan perkara ini, kertas kerja ini menyelesaikan masalah terbuka AD-MLP dan mengalih keluar penggunaan kebenaran tanah trajektori sejarah (GT) untuk mengelakkan kemungkinan kebocoran label. Model yang diterbitkan semula dalam kertas ini, Ego-MLP (Rajah 1 a.2), hanya bergantung pada status ego dan setanding dengan kaedah terkini dari segi metrik jarak L2 dan kadar perlanggaran sedia ada. Pemerhatian lain ialah hanya kaedah sedia ada [13, 16, 43] yang menggabungkan maklumat status ego ke dalam modul perancangan boleh mencapai hasil yang setanding dengan Ego-MLP. Walaupun kaedah ini menggunakan maklumat persepsi tambahan (penjejakan, peta HD, dsb.), kaedah ini tidak terbukti lebih baik daripada Ego-MLP. Pemerhatian ini mengesahkan peranan dominan status ego dalam penilaian gelung terbuka pemanduan autonomi hujung ke hujung.
Tidak. Jelas sekali, sebagai aplikasi kritikal keselamatan, pemanduan autonomi tidak seharusnya bergantung semata-mata pada status ego semasa membuat keputusan. Jadi mengapa ia berlaku bahawa hasil perancangan yang paling maju boleh dicapai dengan hanya menggunakan status ego? Untuk menjawab soalan ini, kertas kerja ini membentangkan satu set analisis komprehensif yang meliputi pendekatan pemanduan autonomi hujung-ke-hujung gelung terbuka sedia ada. Kertas kerja ini mengenal pasti kelemahan utama dalam penyelidikan sedia ada, termasuk aspek yang berkaitan dengan set data, metrik penilaian dan pelaksanaan model tertentu. Makalah ini menyenaraikan dan memperincikan kelemahan ini dalam baki bahagian ini:
Ketidakseimbangan set data. NuScenes ialah penanda aras yang biasa digunakan untuk tugasan penilaian gelung terbuka [11–13, 16, 17, 43]. Walau bagaimanapun, analisis dalam kertas ini menunjukkan bahawa 73.9% daripada data nuScenes melibatkan senario pemanduan garis lurus, seperti yang ditunjukkan oleh taburan trajektori yang ditunjukkan dalam Rajah 2. Untuk senario pemanduan garis lurus ini, mengekalkan kelajuan semasa, arah atau kadar stereng adalah mencukupi pada kebanyakan masa. Oleh itu, maklumat status ego boleh digunakan dengan mudah sebagai jalan pintas untuk menyesuaikan diri dengan tugas perancangan, yang membawa kepada prestasi kukuh Ego-MLP pada nuScenes.
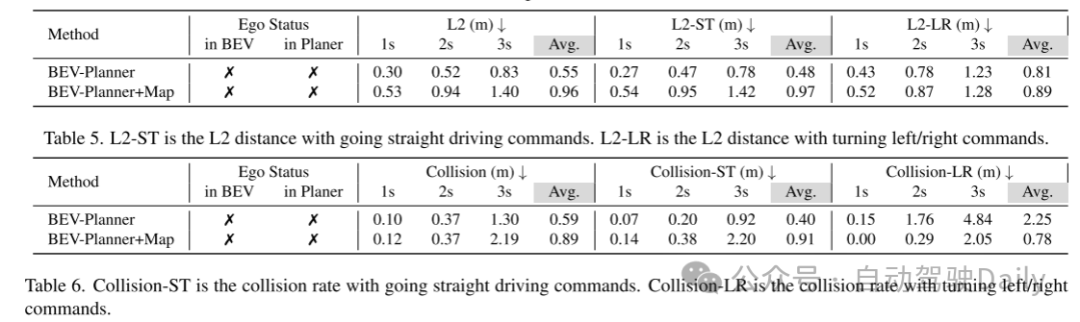
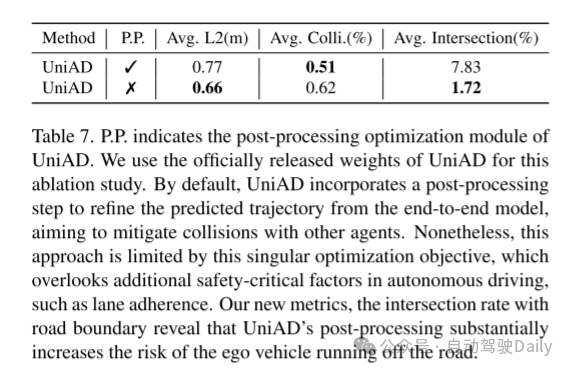
Petunjuk penilaian sedia ada tidak menyeluruh. Baki 26.1% daripada data NuScenes melibatkan senario pemanduan yang lebih mencabar dan mungkin menjadi penanda aras yang lebih baik untuk tingkah laku perancangan. Walau bagaimanapun, kertas ini percaya bahawa penunjuk penilaian semasa yang digunakan secara meluas, seperti jarak L2 antara ramalan dan nilai sebenar yang dirancang dan kadar perlanggaran antara kenderaan sendiri dan halangan sekeliling, tidak dapat mengukur dengan tepat kualiti tingkah laku perancangan model. Dengan memvisualisasikan banyak trajektori yang diramalkan yang dijana oleh pelbagai kaedah, kertas kerja ini menyatakan bahawa beberapa trajektori berisiko tinggi, seperti memandu di luar jalan, mungkin tidak dikenakan penalti yang teruk dalam metrik sedia ada. Untuk menjawab masalah ini, kertas kerja ini memperkenalkan metrik penilaian baharu untuk mengira kadar interaksi antara trajektori yang diramalkan dan sempadan jalan. Penanda aras mengalami perubahan yang ketara apabila memfokuskan pada kadar persimpangan dengan sempadan jalan. Di bawah metrik penilaian baharu ini, Ego-MLP cenderung untuk meramalkan trajektori yang lebih kerap menyimpang dari jalan berbanding UniAD.
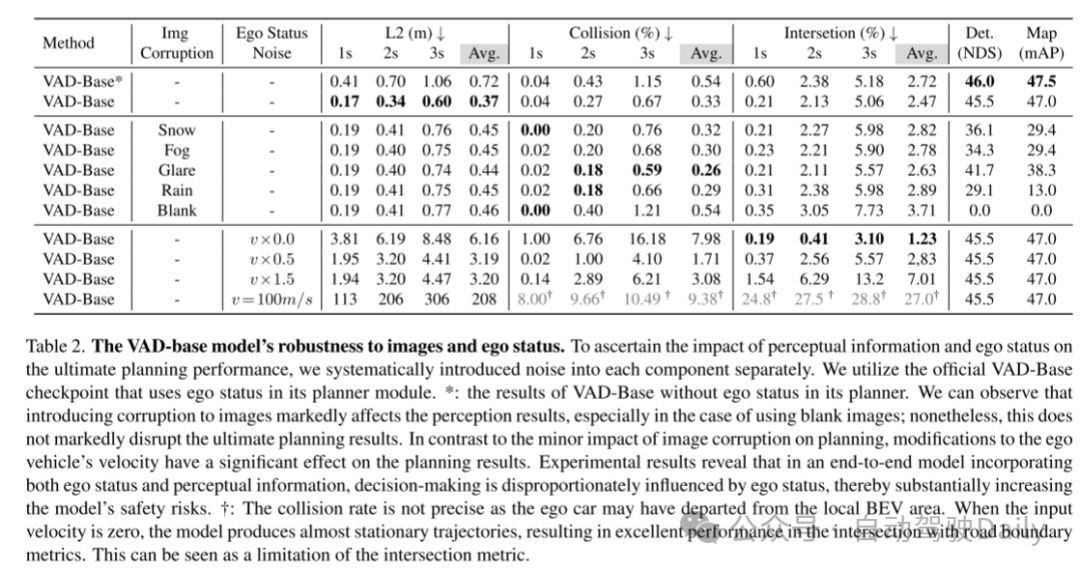
Bias status ego bercanggah dengan logik pemanduan. Memandangkan status ego boleh menyebabkan overfitting, artikel ini seterusnya memerhatikan satu fenomena yang menarik. Keputusan eksperimen kertas ini menunjukkan bahawa dalam beberapa kes, mengalih keluar input visual sepenuhnya daripada rangka kerja pemanduan autonomi hujung ke hujung sedia ada tidak mengurangkan kualiti tingkah laku perancangan dengan ketara. Ini bercanggah dengan logik pemanduan asas, kerana persepsi dijangka memberikan maklumat berguna untuk perancangan. Sebagai contoh, menyekat semua input kamera dalam VAD [16] mengakibatkan kegagalan sepenuhnya modul persepsi, tetapi hanya kemerosotan minimum dalam perancangan jika terdapat status ego. Walau bagaimanapun, menukar halaju input sendiri boleh menjejaskan trajektori akhir yang diramalkan dengan ketara.
Ringkasnya, artikel ini membuat spekulasi bahawa usaha baru-baru ini dalam bidang pemanduan autonomi hujung ke hujung dan hasil terkininya pada nuScenes mungkin disebabkan terlalu bergantung pada status ego, ditambah dengan dominasi pemanduan mudah. senario. Tambahan pula, metrik penilaian semasa tidak mencukupi dalam menilai secara menyeluruh kualiti model trajektori yang diramalkan. Soalan terbuka dan kelemahan ini mungkin memandang rendah potensi kerumitan tugas perancangan dan mewujudkan tanggapan yang mengelirukan bahawa status ego adalah semua yang anda perlukan dalam memandu autonomi hujung ke hujung gelung terbuka.
Potensi gangguan status ego dalam penyelidikan pemanduan autonomi hujung-ke-hujung gelung terbuka semasa menimbulkan persoalan lain: Bolehkah kesan ini diimbangi dengan mengalih keluar status ego daripada keseluruhan model? Walau bagaimanapun, perlu diingat bahawa walaupun pengaruh status ego dikecualikan, kebolehpercayaan penyelidikan pemanduan autonomi gelung terbuka berdasarkan set data nuScenes masih dipersoalkan.
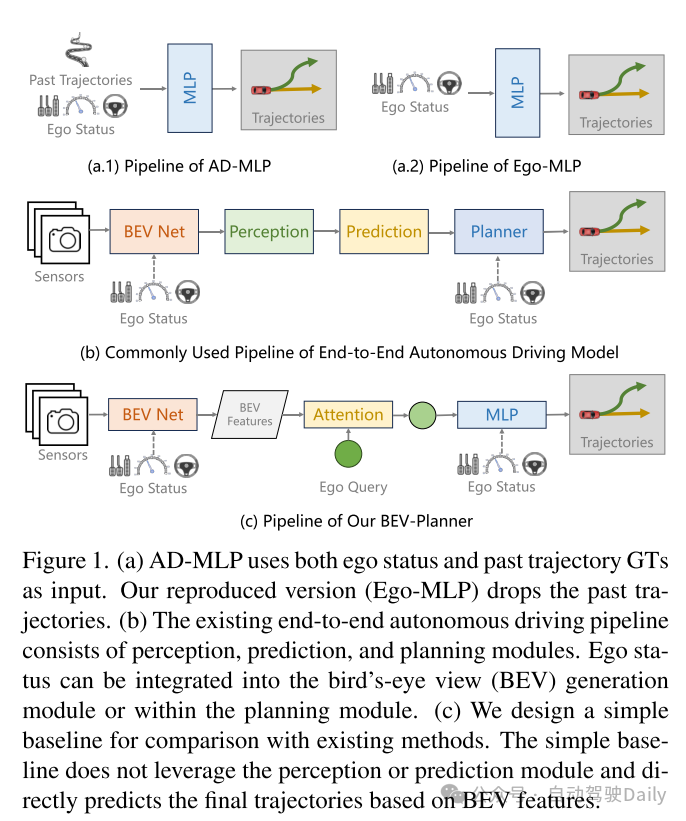
Gambar 1. (a) AD-MLP menggunakan kedua-dua status ego dan nilai sebenar trajektori masa lalu sebagai input. Versi yang diterbitkan semula dalam artikel ini (Ego-MLP) telah mengalih keluar jejak yang lalu. (b) Proses pemanduan autonomi hujung ke hujung sedia ada termasuk modul persepsi, ramalan dan perancangan. Status ego boleh diintegrasikan ke dalam modul penjanaan pandangan mata burung (BEV) atau modul perancangan. (c) Kertas kerja ini mereka bentuk garis asas yang mudah untuk perbandingan dengan kaedah sedia ada. Garis dasar mudah ini tidak menggunakan modul persepsi atau ramalan, tetapi secara langsung meramalkan trajektori akhir berdasarkan ciri BEV.
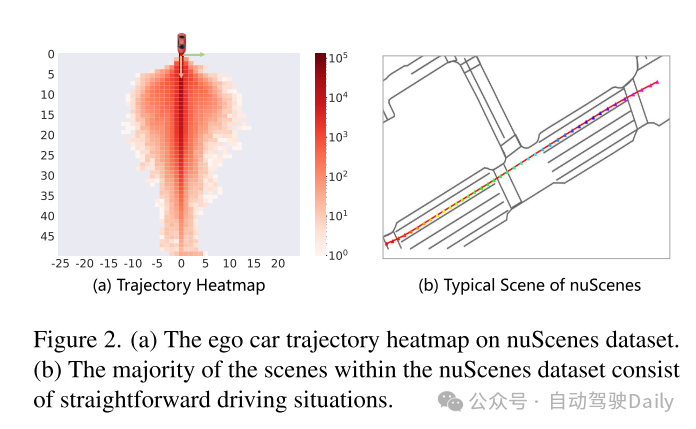
Gambar 2. (a) Peta haba trajektori kenderaan dalam dataset nuScenes. (b) Kebanyakan adegan dalam set data nuScenes terdiri daripada situasi pemanduan lurus.
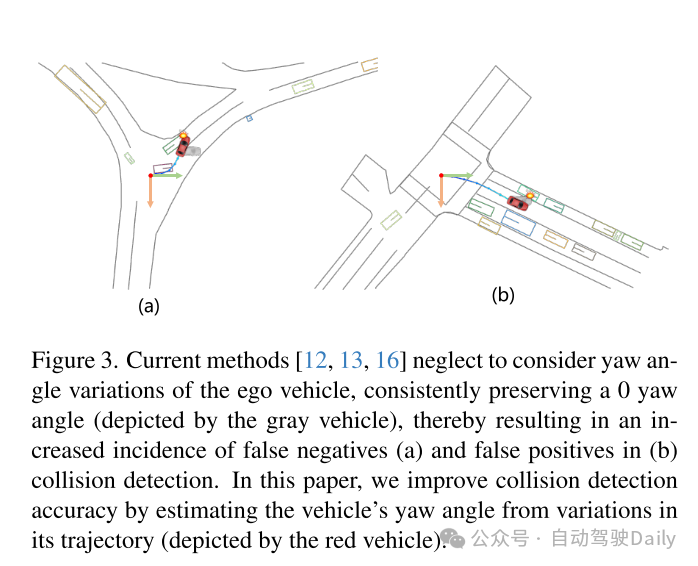
Gambar 3. Kaedah semasa [12, 13, 16] mengabaikan untuk mempertimbangkan perubahan sudut yaw kenderaan sendiri dan sentiasa mengekalkan sudut 0 yaw (diwakili oleh kenderaan kelabu), mengakibatkan negatif palsu (a) dan positif palsu (b) pengesanan perlanggaran Pertambahan. Kertas kerja ini menganggarkan sudut yaw kenderaan (diwakili oleh kenderaan merah) dengan menganggarkan perubahan dalam trajektori kenderaan untuk meningkatkan ketepatan pengesanan perlanggaran.
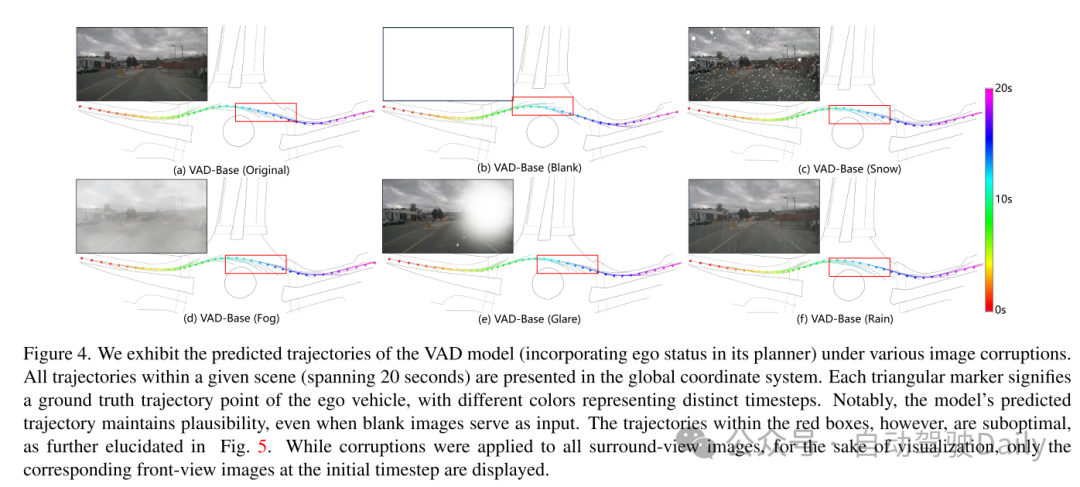
Gambar 4. Makalah ini menunjukkan trajektori ramalan model VAD yang menggabungkan status ego dalam perancangnya di bawah pelbagai senario rasuah imej. Semua trajektori dalam adegan tertentu (menjangkau 20 saat) dipersembahkan dalam sistem koordinat global. Setiap tanda segi tiga mewakili titik trajektori sebenar kenderaan sendiri, dan warna yang berbeza mewakili langkah masa yang berbeza. Perlu diingat bahawa walaupun input adalah imej kosong, trajektori yang diramalkan model kekal munasabah. Walau bagaimanapun, trajektori dalam kotak merah adalah suboptimum, seperti yang dihuraikan dengan lebih lanjut dalam Rajah 5. Walaupun semua imej pandangan sekeliling rosak, untuk memudahkan visualisasi, hanya imej pandangan hadapan yang sepadan dengan langkah masa awal ditunjukkan.
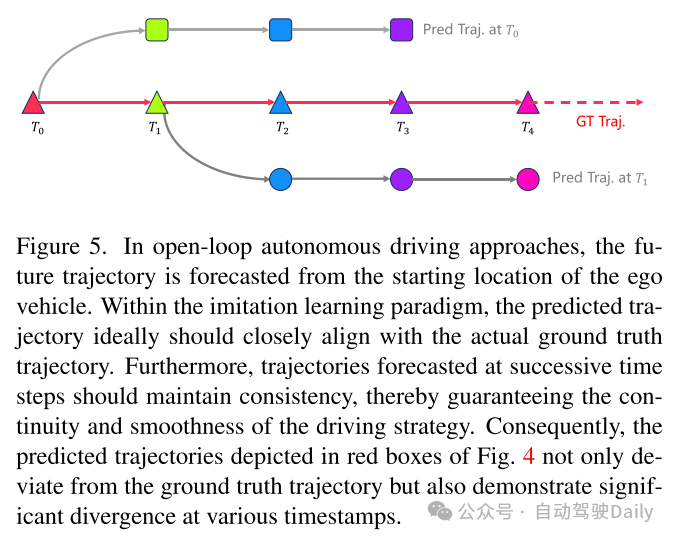
Gambar 5. Dalam kaedah pemanduan autonomi gelung terbuka, trajektori masa depan diramalkan dari kedudukan permulaan kenderaan sendiri. Dalam paradigma pembelajaran tiruan, trajektori yang diramalkan sepatutnya diselaraskan rapat dengan trajektori kebenaran asas yang sebenar. Di samping itu, trajektori yang diramalkan pada langkah masa berturut-turut harus kekal konsisten untuk memastikan kesinambungan dan kelancaran strategi pemanduan. Oleh itu, trajektori yang diramalkan yang ditunjukkan dalam kotak merah dalam Rajah 4 bukan sahaja menyimpang daripada trajektori sebenar, tetapi juga menunjukkan perbezaan yang ketara pada cap masa yang berbeza.
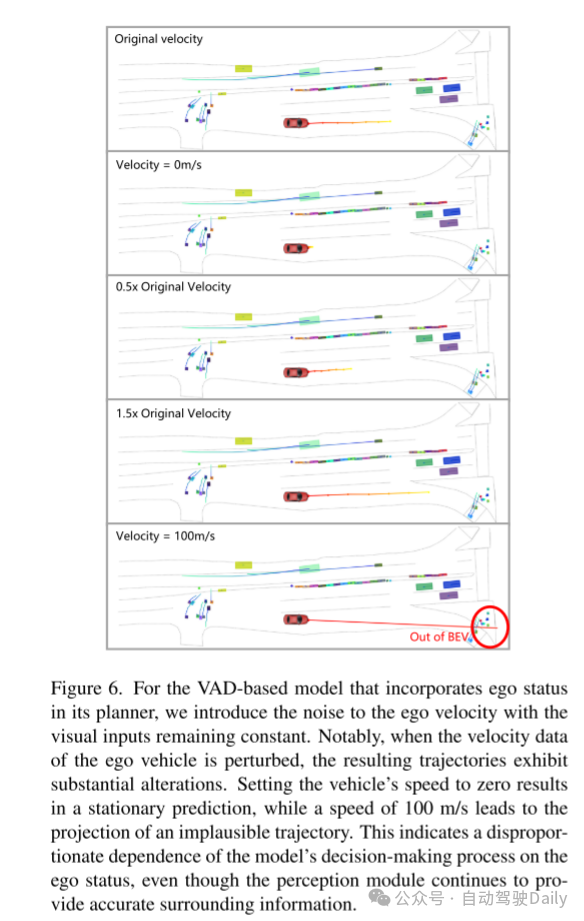
Gambar 6. Untuk model berasaskan VAD yang menggabungkan status ego dalam perancangnya, kertas kerja ini memperkenalkan hingar kepada kelajuan ego sambil mengekalkan input visual tetap. Perlu diingat bahawa apabila data kelajuan kenderaan sendiri terganggu, trajektori yang terhasil menunjukkan perubahan ketara. Menetapkan kelajuan kenderaan kepada sifar menghasilkan ramalan pergerakan pegun, manakala kelajuan 100 m/s menghasilkan ramalan trajektori yang tidak realistik. Ini menunjukkan bahawa walaupun modul persepsi terus memberikan maklumat sekeliling yang tepat, proses membuat keputusan model terlalu bergantung pada status ego.
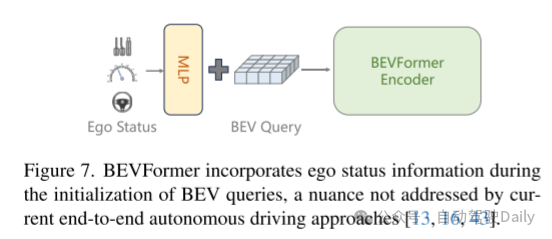
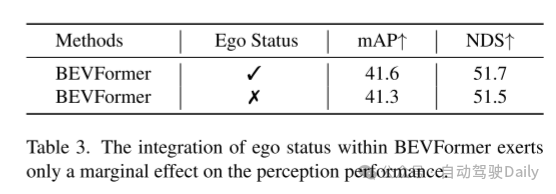
Gambar 7. BEVFormer menggabungkan maklumat status ego dalam proses permulaan pertanyaan BEV, yang merupakan perincian yang tidak diliputi oleh kaedah pemanduan autonomi hujung ke hujung semasa [13, 16, 43].
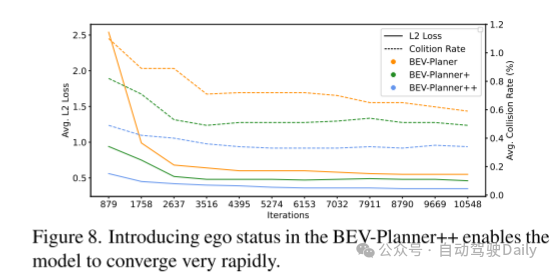
Gambar 8. Pengenalan maklumat status ego ke dalam BEV-Planner++ membolehkan model menumpu dengan cepat.
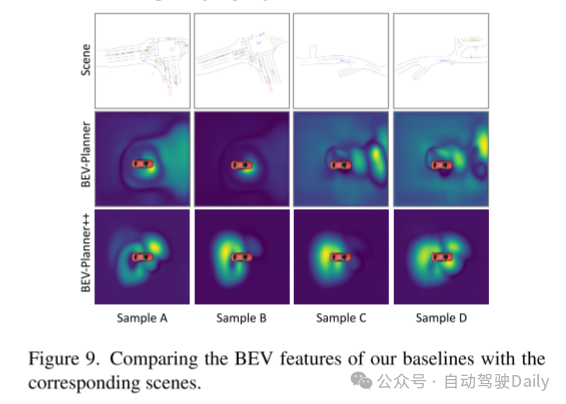
Gambar 9. Bandingkan ciri BEV garis dasar artikel ini dengan senario yang sepadan.
Hasil eksperimen:

Ringkasan kertas:
Kertas ini menyediakan analisis mendalam tentang kaedah pemanduan tanpa akhir semasa Matlamat kertas ini adalah untuk menyumbang hasil penyelidikan dan menggalakkan pembangunan progresif pemanduan autonomi hujung ke hujung.
Petikan:
Li Z, Yu Z, Lan S, et al. Adakah Status Ego Semua yang Anda Perlukan untuk Pemanduan Autonomi Hujung-ke-Hujung Gelung Terbuka?[J].
Atas ialah kandungan terperinci Adakah kenderaan sendiri menyatakan semua yang anda perlukan untuk pemanduan autonomi hujung ke hujung gelung terbuka?. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

Video Face Swap
Tukar muka dalam mana-mana video dengan mudah menggunakan alat tukar muka AI percuma kami!

Artikel Panas
Alat panas

Notepad++7.3.1
Editor kod yang mudah digunakan dan percuma

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

Hantar Studio 13.0.1
Persekitaran pembangunan bersepadu PHP yang berkuasa

Dreamweaver CS6
Alat pembangunan web visual

SublimeText3 versi Mac
Perisian penyuntingan kod peringkat Tuhan (SublimeText3)
Topik panas



 Pengenalan kepada cara menggunakan simulator joiplay
May 04, 2024 pm 06:40 PM
Pengenalan kepada cara menggunakan simulator joiplay
May 04, 2024 pm 06:40 PM
Simulator jojplay ialah simulator telefon mudah alih yang sangat mudah digunakan Ia menyokong permainan komputer untuk dijalankan pada telefon mudah alih dan mempunyai keserasian yang sangat baik Beberapa pemain tidak tahu cara menggunakannya . Cara menggunakan simulator joiplay 1. Mula-mula, anda perlu memuat turun pemalam Joiplay body dan RPGM Sebaik-baiknya pasangkannya mengikut urutan pemalam badan Pakej apk boleh didapati di bar Joiplay (klik untuk mendapatkan >>>). 2. Selepas Android selesai, anda boleh menambah permainan di sudut kiri bawah. 3. Isikan nama secara santai, dan tekan CHOOSE pada executablefile untuk memilih fail game.exe permainan. 4. Ikon boleh dibiarkan kosong atau anda boleh memilih gambar kegemaran anda.
 Bagaimana untuk mendayakan vt pada papan induk MSI
May 01, 2024 am 09:28 AM
Bagaimana untuk mendayakan vt pada papan induk MSI
May 01, 2024 am 09:28 AM
Bagaimana untuk mendayakan VT pada papan induk MSI? Apakah kaedahnya? Laman web ini telah menyusun kaedah pemboleh VT papan induk MSI dengan teliti untuk kebanyakan pengguna Selamat datang untuk membaca dan berkongsi! Langkah pertama ialah memulakan semula komputer dan masuk ke BIOS Apakah yang perlu saya lakukan jika kelajuan permulaan terlalu cepat dan saya tidak boleh memasuki BIOS? Selepas skrin menyala, teruskan menekan "Del" untuk memasuki halaman BIOS Langkah kedua ialah mencari pilihan VT dalam menu dan menghidupkannya Model komputer yang berbeza mempunyai antara muka BIOS yang berbeza dan nama yang berbeza untuk VT : 1. Enter Selepas memasuki halaman BIOS, cari pilihan "OC (atau overclocking)" - "CPU Features" - "SVMMode (atau Intel Virtualization Technology)" dan tukar pilihan "Disabled"
 Bagaimana untuk mendayakan vt pada papan induk ASRock
May 01, 2024 am 08:49 AM
Bagaimana untuk mendayakan vt pada papan induk ASRock
May 01, 2024 am 08:49 AM
Bagaimana untuk membolehkan VT pada papan induk ASRock, apakah kaedah dan cara mengendalikannya. Laman web ini telah menyusun kaedah ASRock motherboard vt enable untuk pengguna membaca dan berkongsi! Langkah pertama adalah untuk memulakan semula komputer Selepas skrin menyala, teruskan menekan kekunci "F2" untuk memasuki halaman BIOS. Langkah kedua ialah mencari pilihan VT dalam menu dan menghidupkannya Model papan induk yang berbeza mempunyai antara muka BIOS yang berbeza dan nama yang berbeza untuk VT 1. Selepas memasuki halaman BIOS, cari "Advanced (Advanced)" - "CPU Configuration (CPU) Konfigurasi)" - pilihan "SVMMOD (teknologi penmayaran)", tukar "Dilumpuhkan" kepada "Didayakan"
 Bagaimana untuk menyelesaikan masalah ekor panjang dalam senario pemanduan autonomi?
Jun 02, 2024 pm 02:44 PM
Bagaimana untuk menyelesaikan masalah ekor panjang dalam senario pemanduan autonomi?
Jun 02, 2024 pm 02:44 PM
Semalam semasa temu bual, saya telah ditanya sama ada saya telah membuat sebarang soalan berkaitan ekor panjang, jadi saya fikir saya akan memberikan ringkasan ringkas. Masalah ekor panjang pemanduan autonomi merujuk kepada kes tepi dalam kenderaan autonomi, iaitu, kemungkinan senario dengan kebarangkalian yang rendah untuk berlaku. Masalah ekor panjang yang dirasakan adalah salah satu sebab utama yang kini mengehadkan domain reka bentuk pengendalian kenderaan autonomi pintar satu kenderaan. Seni bina asas dan kebanyakan isu teknikal pemanduan autonomi telah diselesaikan, dan baki 5% masalah ekor panjang secara beransur-ansur menjadi kunci untuk menyekat pembangunan pemanduan autonomi. Masalah ini termasuk pelbagai senario yang berpecah-belah, situasi yang melampau dan tingkah laku manusia yang tidak dapat diramalkan. "Ekor panjang" senario tepi dalam pemanduan autonomi merujuk kepada kes tepi dalam kenderaan autonomi (AVs) kes Edge adalah senario yang mungkin dengan kebarangkalian yang rendah untuk berlaku. kejadian yang jarang berlaku ini
 Bagaimana untuk memasang sistem Windows pada komputer tablet
May 03, 2024 pm 01:04 PM
Bagaimana untuk memasang sistem Windows pada komputer tablet
May 03, 2024 pm 01:04 PM
Bagaimana untuk menyalakan sistem Windows pada tablet BBK Cara pertama ialah memasang sistem pada cakera keras. Selagi sistem komputer tidak ranap, anda boleh memasuki sistem, dan memuat turun perkara, anda boleh menggunakan cakera keras komputer untuk memasang sistem. Kaedahnya adalah seperti berikut: Bergantung pada konfigurasi komputer anda, anda boleh memasang sistem pengendalian WIN7. Kami memilih untuk memuat turun sistem pemasangan semula satu klik Xiaobai dalam vivopad untuk memasangnya Mula-mula, pilih versi sistem yang sesuai untuk komputer anda, dan klik "Pasang sistem ini" ke langkah seterusnya. Kemudian kami menunggu dengan sabar untuk sumber pemasangan dimuat turun, dan kemudian menunggu persekitaran digunakan dan dimulakan semula. Langkah-langkah untuk memasang win11 pada vivopad ialah: mula-mula gunakan perisian untuk menyemak sama ada win11 boleh dipasang. Selepas melepasi pengesanan sistem, masukkan tetapan sistem. Pilih pilihan Kemas Kini & Keselamatan di sana. klik
 Panduan Simulator Hidup Semula
May 07, 2024 pm 05:28 PM
Panduan Simulator Hidup Semula
May 07, 2024 pm 05:28 PM
Life Restart Simulator adalah permainan simulasi yang sangat menarik Permainan ini telah menjadi sangat popular baru-baru ini strategi ada? Panduan Panduan Simulator Hidup Semula Ciri-ciri Simulator Mulakan Semula Kehidupan Ini adalah permainan yang sangat kreatif di mana pemain boleh bermain mengikut idea mereka sendiri. Terdapat banyak tugas yang perlu diselesaikan setiap hari, dan anda boleh menikmati kehidupan baru di dunia maya ini. Terdapat banyak lagu dalam permainan, dan semua jenis kehidupan yang berbeza sedang menunggu untuk anda alami. Hidup Semula Simulator Kandungan Permainan Kad Lukisan Bakat: Bakat: Anda mesti memilih kotak kecil misteri untuk menjadi abadi. Pelbagai kapsul kecil tersedia untuk mengelak daripada mati di tengah jalan. Cthulhu boleh memilih
 Pengenalan kepada kaedah tetapan fon simulator joiplay
May 09, 2024 am 08:31 AM
Pengenalan kepada kaedah tetapan fon simulator joiplay
May 09, 2024 am 08:31 AM
Simulator jojplay sebenarnya boleh menyesuaikan fon permainan, dan boleh menyelesaikan masalah kehilangan aksara dan aksara berkotak dalam teks Saya rasa ramai pemain masih tidak tahu cara mengendalikannya fon simulator jojplay. Cara menetapkan fon simulator joiplay 1. Mula-mula buka simulator joiplay, klik pada tetapan (tiga titik) di sudut kanan atas, dan cari. 2. Dalam lajur RPGMSettings, klik untuk memilih fon tersuai CustomFont dalam baris ketiga. 3. Pilih fail fon dan klik OK Berhati-hati untuk tidak mengklik ikon "Simpan" di sudut kanan bawah, jika tidak tetapan lalai akan dipulihkan. 4. Pengasas dan Quasi-Yuan aksara Cina ringkas disyorkan (sudah dalam folder permainan Fuxing dan Rebirth). joi
 Bagaimana untuk memadam aplikasi simulator guruh dan kilat? -Bagaimana untuk memadam aplikasi dalam Simulator Thunderbolt?
May 08, 2024 pm 02:40 PM
Bagaimana untuk memadam aplikasi simulator guruh dan kilat? -Bagaimana untuk memadam aplikasi dalam Simulator Thunderbolt?
May 08, 2024 pm 02:40 PM
Versi rasmi Thunderbolt Simulator ialah alat emulator Android yang sangat profesional. Jadi bagaimana untuk memadam aplikasi simulator guruh dan kilat? Bagaimana untuk memadam aplikasi dalam Simulator Thunderbolt? Biarkan editor memberi anda jawapan di bawah! Bagaimana untuk memadam aplikasi simulator guruh dan kilat? 1. Klik dan tahan ikon apl yang ingin anda padamkan. 2. Tunggu sebentar sehingga pilihan untuk menyahpasang atau memadam aplikasi muncul. 3. Seret apl ke pilihan nyahpasang. 4. Dalam tetingkap pengesahan yang muncul, klik OK untuk menyelesaikan pemadaman aplikasi.
