
 Peranti teknologi
AI
Bagaimanakah kamera dan lidar ditentukur? Gambaran keseluruhan semua alat penentukuran arus perdana dalam industri
Peranti teknologi
AI
Bagaimanakah kamera dan lidar ditentukur? Gambaran keseluruhan semua alat penentukuran arus perdana dalam industri
Bagaimanakah kamera dan lidar ditentukur? Gambaran keseluruhan semua alat penentukuran arus perdana dalam industri

Penentukuran kamera dan lidar ialah kerja asas yang penting dalam banyak tugasan Ketepatan penentukuran secara langsung mempengaruhi had atas kesan gabungan penyelesaian berikutnya. Memandangkan banyak syarikat pemanduan dan robotik autonomi melaburkan banyak tenaga manusia dan sumber bahan untuk terus meningkatkan ketepatan penentukuran, hari ini kami akan memperkenalkan anda kepada beberapa kotak alat penentukuran Kamera-Lidar biasa, dan kami mengesyorkan anda mengumpulnya!
1.Libcbdetect
Pengesanan papan dam berbilang dalam satu pukulan: https://www.cvlibs.net/software/libcbdetect/
Algoritma yang ditulis menggunakan MATLAB boleh mengekstrak titik sudut secara automatik dan menjadikannya tepat kepada subpiksel level , dan gabungkan titik sudut ini menjadi corak papan dam segi empat tepat. Algoritma ini mempunyai keupayaan untuk memproses pelbagai jenis imej (seperti kamera lubang jarum, kamera mata ikan, kamera panoramik).

2. Pakej penentukuran perisian auto
kit alat penentukuran lidar-kamera rangka kerja.
Pautan: https://github.com/autowarefoundation/autoware_ai_utilities/tree/master/autoware_camera_lidar_calibrator
3 Penentukuran sasaran berdasarkan padanan 3D-3D berdasarkan padanan 3D-3D Titik penentukuran Lidar
, pakej ROS, daripada kertas "LiDAR-Camera Calibration using 3D-3D Point correspondences"! Pautan: https://github.com/ankitdhall/lidar_camera_calibration
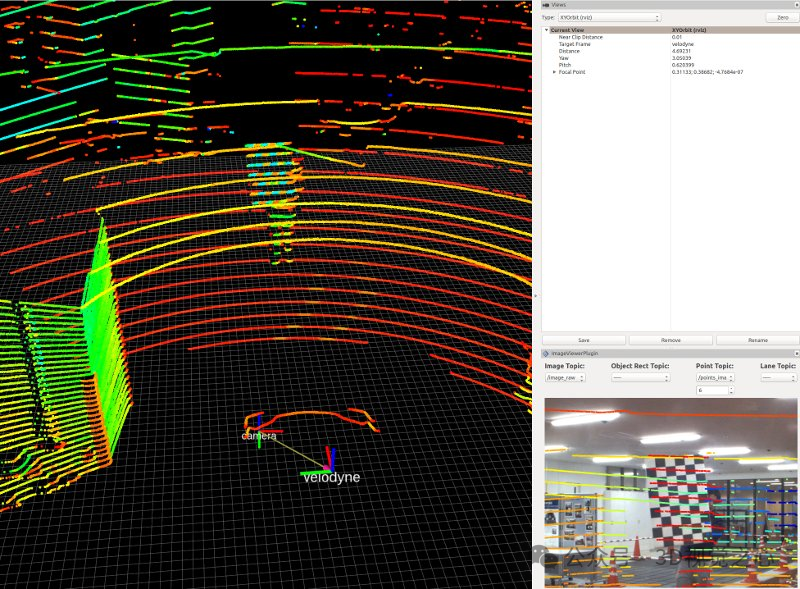
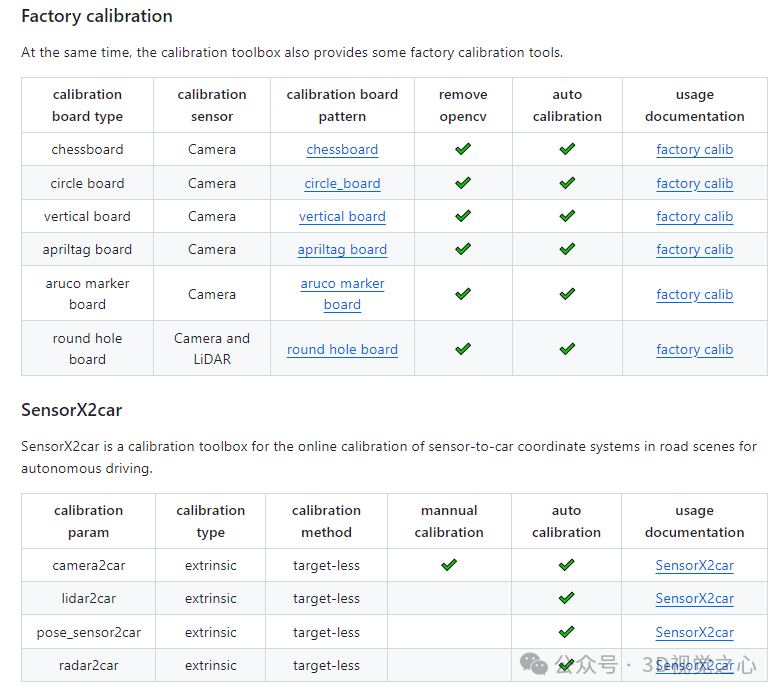
44 Shanghai AI Lab OpenCalib
Dihasilkan oleh Makmal Kecerdasan Buatan Shanghai, OpenCalib menyediakan kotak alat penderia. Kotak alat boleh digunakan untuk menentukur penderia seperti IMU, lidar, kamera dan radar. Pautan: https://github.com/PJLab-ADG/SensorsCalibration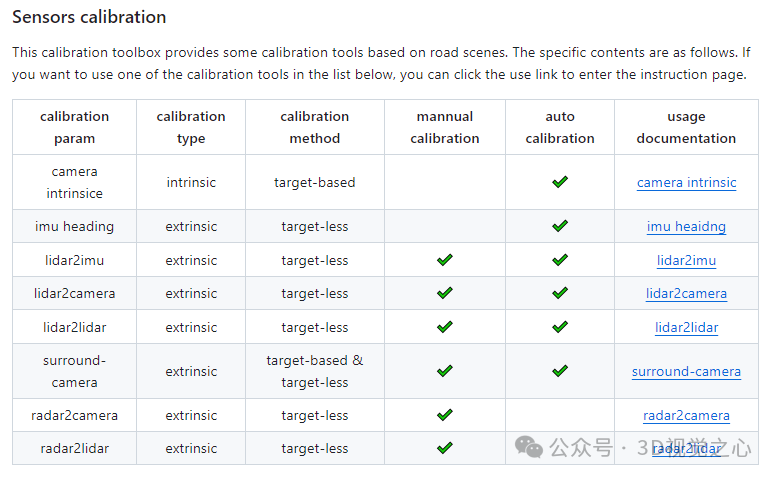
5.Apollo calibration tool
Apollo calibration toolbox: https://.Apollo toolbox/Apollobox apollo/tree/master/modules/calibration6.Alat penentukuran kamera Livox
Penyelesaian ini menyediakan kaedah untuk menentukur parameter luaran secara manual antara radar dan kamera Livox Ia telah digunakan dalam Mid-40, Horizon dan Tele Disahkan pada -15. Ia termasuk kod yang berkaitan dengan pengiraan parameter dalaman kamera, mendapatkan data penentukuran, pengoptimuman pengiraan parameter luaran dan aplikasi gabungan kamera radar. Dalam penyelesaian ini, titik sudut plat penentukuran digunakan sebagai sasaran penentukuran Disebabkan ciri pengimbasan yang tidak berulang pada radar Livox, ketumpatan awan titik adalah agak besar, menjadikannya lebih mudah untuk mencari kedudukan tepat. titik sudut dalam awan titik radar. Penentukuran dan gabungan radar kamera juga boleh memberikan hasil yang baik. Pautan: https://github.com/Livox-SDK/livox_camera_lidar_calibrationDokumentasi Cina: https://github.com/Livox-SDK/livox_camera_lidar_calibration/blob/master/doc_resources._resources/README 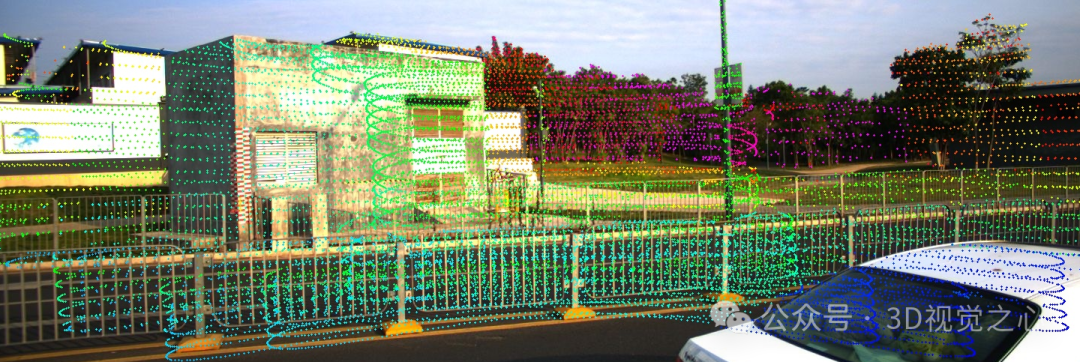 7.CalibrationTools
7.CalibrationTools
CalibrationTools menyediakan alat penentukuran untuk lidar-lidar, kamera lidar dan pasangan sensor lain. Di samping itu, turut disediakan:
1) Kedudukan - Alat anggaran berat sebelah menganggarkan parameter penderia yang digunakan untuk pengiraan mati (IMU dan odometri) untuk prestasi kedudukan yang lebih baik! 2) Alat visualisasi dan analisis untuk output kawalan Autoware; Kotak alat Matlab sendiri menyokong penentukuran lidar dan kamera, pautan: https://ww2.mathworks.cn/help/lidar/ug/lidar-and-camera-calibration.html 9.ROS penentukuran alat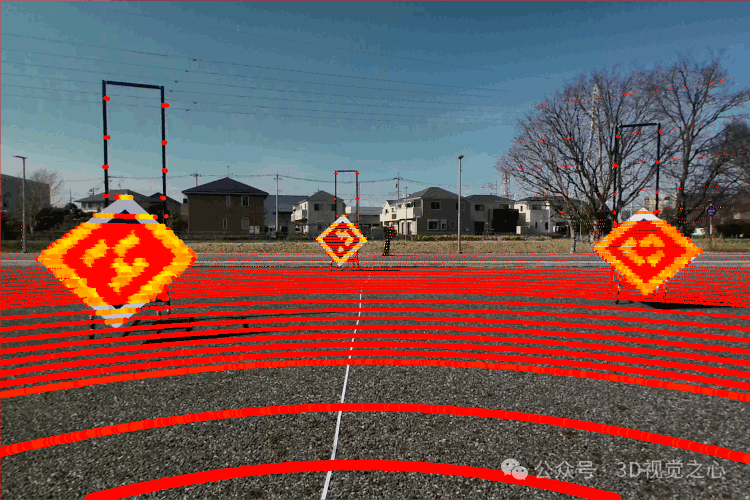

10. Penentukuran lidar visual langsung
Pakej ini menyediakan kotak alat untuk penentukuran kamera lidar: Universal: Ia boleh mengendalikan pelbagai model unjuran lidar dan kamera, termasuk putaran dan lidar pengimbasan Tidak berulang. kamera unjuran lubang jarum, mata ikan dan omnidirectional. Tanpa sasaran: Ia tidak memerlukan sasaran penentukuran, tetapi menggunakan struktur dan tekstur persekitaran untuk penentukuran. Tangkapan tunggal: Penentukuran hanya memerlukan sekurang-kurangnya sepasang awan titik lidar dan imej kamera. Secara pilihan, berbilang pasangan data kamera lidar boleh digunakan untuk meningkatkan ketepatan. Automatik: Proses penentukuran adalah automatik dan tidak memerlukan tekaan awal. Tepat dan Teguh:Ia menggunakan algoritma pendaftaran kamera lidar langsung tahap piksel, yang lebih teguh dan tepat berbanding pendaftaran kamera lidar tidak langsung berasaskan tepi.
Pautan: https://github.com/koide3/direct_visual_lidar_calibration
11.2D lidar-camera toolbox
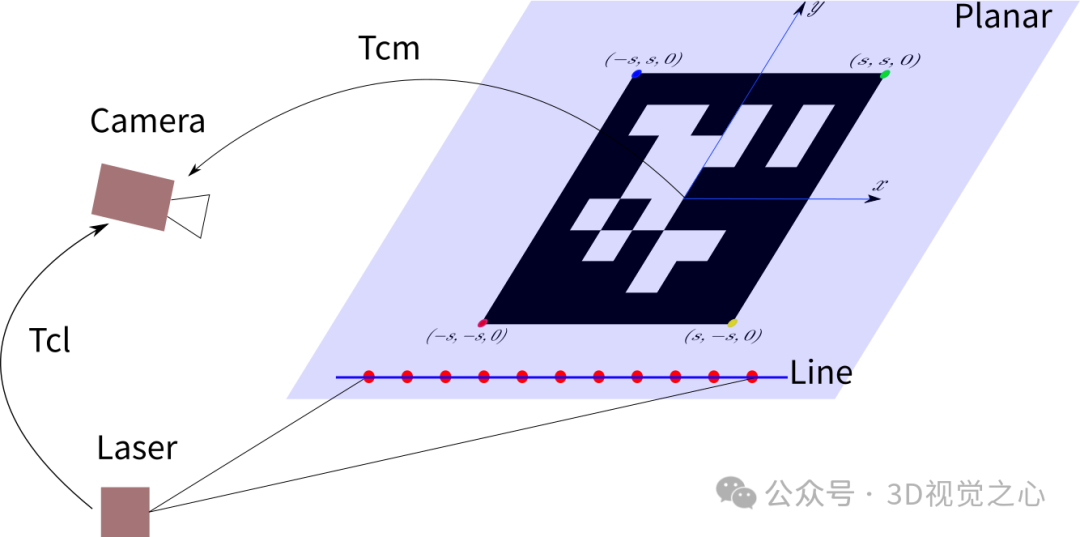
Ini ialah kod penentukuran automatik berasaskan ROS untuk laser satu baris dan parameter luaran kamera. Prinsip penentukuran ditunjukkan dalam rajah di bawah Kamera menganggarkan persamaan satah satah plat penentukuran dalam sistem koordinat kamera melalui kod QR Memandangkan awan titik laser jatuh pada satah, awan titik ditukar kepada parameter luaran sistem koordinat kamera melalui sistem koordinat laser Dalam sistem koordinat kamera, jarak dari titik yang dibina ke satah digunakan sebagai ralat, yang diselesaikan menggunakan kuasa dua terkecil tak linear.
Pautan: https://github.com/MegviiRobot/CamLaserCalibraTool
Atas ialah kandungan terperinci Bagaimanakah kamera dan lidar ditentukur? Gambaran keseluruhan semua alat penentukuran arus perdana dalam industri. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

AI Hentai Generator
Menjana ai hentai secara percuma.

Artikel Panas
Alat panas

Notepad++7.3.1
Editor kod yang mudah digunakan dan percuma

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

Hantar Studio 13.0.1
Persekitaran pembangunan bersepadu PHP yang berkuasa

Dreamweaver CS6
Alat pembangunan web visual

SublimeText3 versi Mac
Perisian penyuntingan kod peringkat Tuhan (SublimeText3)
Topik panas
 1377
1377
 52
52

 Cara Mentafsirkan Hasil Output Debian Sniffer
Apr 12, 2025 pm 11:00 PM
Cara Mentafsirkan Hasil Output Debian Sniffer
Apr 12, 2025 pm 11:00 PM
DebiansNiffer adalah alat sniffer rangkaian yang digunakan untuk menangkap dan menganalisis cap waktu paket rangkaian: Memaparkan masa untuk penangkapan paket, biasanya dalam beberapa saat. Alamat IP Sumber (SourceIP): Alamat rangkaian peranti yang menghantar paket. Alamat IP Destinasi (DestinationIP): Alamat rangkaian peranti yang menerima paket data. Sourceport: Nombor port yang digunakan oleh peranti yang menghantar paket. Destinatio
 Cara memeriksa konfigurasi OpenSSL Debian
Apr 12, 2025 pm 11:57 PM
Cara memeriksa konfigurasi OpenSSL Debian
Apr 12, 2025 pm 11:57 PM
Artikel ini memperkenalkan beberapa kaedah untuk memeriksa konfigurasi OpenSSL sistem Debian untuk membantu anda dengan cepat memahami status keselamatan sistem. 1. Sahkan versi OpenSSL terlebih dahulu, sahkan sama ada OpenSSL telah dipasang dan maklumat versi. Masukkan arahan berikut di terminal: Jika OpenSslversion tidak dipasang, sistem akan meminta ralat. 2. Lihat fail konfigurasi. Fail konfigurasi utama OpenSSL biasanya terletak di /etc/ssl/openssl.cnf. Anda boleh menggunakan editor teks (seperti nano) untuk melihat: Sudonano/etc/ssl/openssl.cnf Fail ini mengandungi maklumat konfigurasi penting seperti kunci, laluan sijil, dan algoritma penyulitan. 3. Menggunakan OPE
 Bagaimana log tomcat membantu menyelesaikan masalah kebocoran memori
Apr 12, 2025 pm 11:42 PM
Bagaimana log tomcat membantu menyelesaikan masalah kebocoran memori
Apr 12, 2025 pm 11:42 PM
Log Tomcat adalah kunci untuk mendiagnosis masalah kebocoran memori. Dengan menganalisis log tomcat, anda boleh mendapatkan wawasan mengenai kelakuan memori dan pengumpulan sampah (GC), dengan berkesan mencari dan menyelesaikan kebocoran memori. Berikut adalah cara menyelesaikan masalah kebocoran memori menggunakan log Tomcat: 1. GC Log Analysis terlebih dahulu, membolehkan pembalakan GC terperinci. Tambah pilihan JVM berikut kepada parameter permulaan TOMCAT: -XX: PrintGCDetails-XX: PrintGCDATestamps-XLogGC: GC.LOG Parameter ini akan menghasilkan log GC terperinci (GC.LOG), termasuk maklumat seperti jenis GC, saiz dan masa yang dikitar semula. Analisis GC.Log
 Apakah tetapan keselamatan untuk log debian tomcat?
Apr 12, 2025 pm 11:48 PM
Apakah tetapan keselamatan untuk log debian tomcat?
Apr 12, 2025 pm 11:48 PM
Untuk meningkatkan keselamatan log Debiantomcat, kita perlu memberi perhatian kepada dasar -dasar utama berikut: 1. Kawalan Kebenaran dan Pengurusan Fail: Kebenaran Fail Log: Kebenaran fail log lalai (640) mengehadkan akses. Adalah disyorkan untuk mengubah suai nilai UMASK dalam skrip Catalina.sh (contohnya, berubah dari 0027 hingga 0022), atau secara langsung menetapkan fail filepermissions dalam fail konfigurasi LOG4J2 untuk memastikan kebenaran baca dan tulis yang sesuai. Lokasi fail log: Log Tomcat biasanya terletak di/opt/tomcat/log (atau laluan yang serupa), dan tetapan kebenaran direktori ini perlu diperiksa dengan kerap. 2. Putaran dan format log: putaran log: konfigurasikan server.xml
 Perbandingan antara Sniffer Debian dan Wireshark
Apr 12, 2025 pm 10:48 PM
Perbandingan antara Sniffer Debian dan Wireshark
Apr 12, 2025 pm 10:48 PM
Artikel ini membincangkan alat analisis rangkaian Wireshark dan alternatifnya dalam sistem Debian. Harus jelas bahawa tidak ada alat analisis rangkaian standard yang dipanggil "Debiansniffer". Wireshark adalah penganalisis protokol rangkaian terkemuka industri, sementara Debian Systems menawarkan alat lain dengan fungsi yang sama. Perbandingan Ciri Fungsian Wireshark: Ini adalah penganalisis protokol rangkaian yang kuat yang menyokong penangkapan data rangkaian masa nyata dan tontonan mendalam kandungan paket data, dan menyediakan sokongan protokol yang kaya, penapisan dan fungsi carian untuk memudahkan diagnosis masalah rangkaian. Alat Alternatif dalam Sistem Debian: Sistem Debian termasuk rangkaian seperti TCPDUMP dan TSHARK
 Peranan Sniffer Debian dalam Pengesanan Serangan DDOS
Apr 12, 2025 pm 10:42 PM
Peranan Sniffer Debian dalam Pengesanan Serangan DDOS
Apr 12, 2025 pm 10:42 PM
Artikel ini membincangkan kaedah pengesanan serangan DDoS. Walaupun tiada kes permohonan langsung "debiansniffer" ditemui, kaedah berikut boleh digunakan untuk pengesanan serangan DDOS: Teknologi Pengesanan Serangan DDo Sebagai contoh, skrip Python yang digabungkan dengan perpustakaan Pyshark dan Colorama boleh memantau trafik rangkaian dalam masa nyata dan mengeluarkan makluman. Pengesanan berdasarkan analisis statistik: dengan menganalisis ciri statistik trafik rangkaian, seperti data
 Cara Menggunakan Log Debian Apache Untuk Meningkatkan Prestasi Laman Web
Apr 12, 2025 pm 11:36 PM
Cara Menggunakan Log Debian Apache Untuk Meningkatkan Prestasi Laman Web
Apr 12, 2025 pm 11:36 PM
Artikel ini akan menerangkan bagaimana untuk meningkatkan prestasi laman web dengan menganalisis log Apache di bawah sistem Debian. 1. Asas Analisis Log Apache Log merekodkan maklumat terperinci semua permintaan HTTP, termasuk alamat IP, timestamp, url permintaan, kaedah HTTP dan kod tindak balas. Dalam sistem Debian, log ini biasanya terletak di direktori/var/log/apache2/access.log dan /var/log/apache2/error.log. Memahami struktur log adalah langkah pertama dalam analisis yang berkesan. 2. Alat Analisis Log Anda boleh menggunakan pelbagai alat untuk menganalisis log Apache: Alat baris arahan: grep, awk, sed dan alat baris arahan lain.
 Cara Memantau Prestasi SSL Nginx di Debian
Apr 12, 2025 pm 10:18 PM
Cara Memantau Prestasi SSL Nginx di Debian
Apr 12, 2025 pm 10:18 PM
Artikel ini menerangkan bagaimana untuk memantau prestasi SSL pelayan Nginx secara berkesan pada sistem Debian. Kami akan menggunakan NginXExporter untuk mengeksport data status nginx ke Prometheus dan kemudian memaparkannya secara visual melalui Grafana. Langkah 1: Mengkonfigurasi Nginx Pertama, kita perlu mengaktifkan modul Stub_status dalam fail konfigurasi Nginx untuk mendapatkan maklumat status nginx. Tambahkan coretan berikut dalam fail konfigurasi nginx anda (biasanya terletak di /etc/nginx/nginx.conf atau termasuk fail): lokasi/nginx_status {stub_status
