
 Peranti teknologi
AI
Rangka kerja anggaran pose objek 6D sampel sifar SAM-6D, satu langkah lebih dekat kepada kecerdasan yang terkandung
Peranti teknologi
AI
Rangka kerja anggaran pose objek 6D sampel sifar SAM-6D, satu langkah lebih dekat kepada kecerdasan yang terkandung
Rangka kerja anggaran pose objek 6D sampel sifar SAM-6D, satu langkah lebih dekat kepada kecerdasan yang terkandung

Anggaran pose objek memainkan peranan penting dalam banyak aplikasi dunia nyata, seperti kecerdasan yang terkandung, manipulasi robot yang cekap dan realiti tambahan.
Dalam medan ini, tugas pertama yang mendapat perhatian ialah Anggaran pose 6D peringkat contoh, yang memerlukan data beranotasi tentang objek sasaran untuk latihan model, menjadikan objek model dalam khusus dan tidak dapat dipindahkan ke pada objek baru. Kemudian, tumpuan penyelidikan beransur-ansur bertukar kepada anggaran pose 6D peringkat kategori, yang digunakan untuk memproses objek ghaib, tetapi memerlukan objek itu tergolong dalam kategori minat yang diketahui.
Dan anggaran pose 6D tangkapan sifar ialah tetapan tugas yang lebih umum, memandangkan model CAD bagi sebarang objek, bertujuan untuk mengesan objek sasaran dalam adegan dan menganggarkan pose 6Dnya. Walaupun kepentingannya, tetapan tugasan sifar ini menghadapi cabaran yang ketara dalam kedua-dua pengesanan objek dan anggaran pose. . SAM mencapai pembahagian ketepatan tinggi melalui pelbagai isyarat, seperti piksel, kotak sempadan, teks dan topeng, dsb., yang turut menyediakan sokongan yang boleh dipercayai untuk tugas anggaran pose objek 6D sampel sifar, yang menunjukkan potensinya yang menjanjikan.
 Oleh itu, penyelidik dari Interdimensional Intelligence, Universiti China Hong Kong (Shenzhen) dan Universiti Teknologi China Selatan bersama-sama mencadangkan rangka kerja anggaran pose objek 6D sifar sampel yang inovatif SAM-6D. Penyelidikan ini telah dimasukkan dalam CVPR 2024.
Oleh itu, penyelidik dari Interdimensional Intelligence, Universiti China Hong Kong (Shenzhen) dan Universiti Teknologi China Selatan bersama-sama mencadangkan rangka kerja anggaran pose objek 6D sifar sampel yang inovatif SAM-6D. Penyelidikan ini telah dimasukkan dalam CVPR 2024.
Pautan kertas: https://arxiv.org/pdf/2311.15707.pdf
- pautan D: https://arxiv.org/pdf
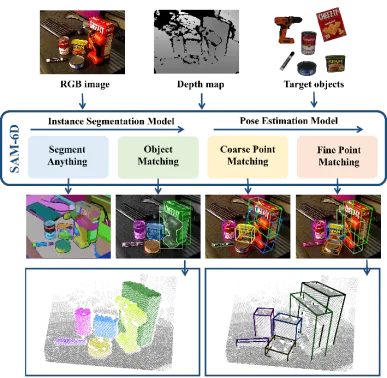
- SAM-6D mencapai anggaran pose objek 6D sampel sifar melalui dua langkah, termasuk pembahagian contoh dan anggaran pose. Sejajar dengan itu, memandangkan objek sasaran sewenang-wenangnya, SAM-6D menggunakan dua sub-rangkaian khusus, iaitu
- Model Segmentasi Instance (ISM) dan Model Anggaran Pose (PEM) , untuk mencapai sasaran daripada imej adegan RGB-D di mana, ISM Menggunakan SAM sebagai titik permulaan yang sangat baik, digabungkan dengan skor pemadanan objek yang direka dengan teliti untuk mencapai pembahagian contoh objek arbitrari, PEM menyelesaikan masalah pose objek melalui proses pemadanan set titik dua peringkat tempatan ke tempatan. Gambaran keseluruhan SAM-6D ditunjukkan dalam Rajah 2. . anggaran Rangka kerja, diberikan model CAD bagi sebarang objek, mencapai pembahagian contoh dan menganggarkan objek sasaran daripada imej RGB-D, dan berprestasi cemerlang pada tujuh set data teras BOP [2]. SAM-6D memanfaatkan keupayaan pembahagian pukulan sifar model Semua Segmen untuk menjana semua calon yang mungkin dan mereka bentuk skor pemadanan objek baharu untuk mengenal pasti calon yang sepadan dengan objek sasaran.
SAM-6D menganggap anggaran pose sebagai masalah padanan set titik setempat-ke-tempatan, menggunakan reka bentuk Token Latar Belakang yang mudah tetapi berkesan, dan mencadangkan model padanan set titik dua peringkat untuk objek sewenang-wenangnya Peringkat pertama melaksanakan padanan set titik kasar untuk mendapatkan pose objek awal, dan peringkat kedua menggunakan transformer set titik jarang ke padat novel untuk melakukan padanan set titik halus untuk mengoptimumkan lagi pose.
 Model Segmentasi Instance (ISM)
Model Segmentasi Instance (ISM)
SAM-6D menggunakan Model Segmentasi Instance (ISM) untuk mengesan dan membahagikan topeng objek arbitrari.
Memandangkan pemandangan berantakan yang diwakili oleh imej RGB, ISM memanfaatkan keupayaan pemindahan tangkapan sifar Model Semua Segmentasi (SAM) untuk menjana semua calon yang mungkin. Bagi setiap objek calon, ISM mengira skor padanan objek untuk menganggar sejauh mana ia sepadan dengan objek sasaran dari segi semantik, rupa dan geometri. Akhir sekali, dengan hanya menetapkan ambang yang sepadan, contoh yang sepadan dengan objek sasaran boleh dikenal pasti.
Skor padanan objek dikira dengan jumlah wajaran tiga item padanan:
Padanan Semantik - Untuk objek sasaran, ISM memaparkan templat objek daripada pelbagai perspektif dan menggunakan DINOv2 [3] Model ViT yang telah dilatih mengekstrak ciri semantik objek calon dan templat objek, dan mengira skor korelasi antara mereka. Skor padanan semantik diperoleh dengan purata skor tertinggi K teratas, dan templat objek yang sepadan dengan skor korelasi tertinggi dianggap sebagai templat padanan terbaik.
Padanan rupa - Untuk templat padanan terbaik, model ViT digunakan untuk mengekstrak ciri blok imej dan mengira korelasi antaranya dan ciri blok objek calon untuk mendapatkan skor padanan penampilan, yang digunakan untuk membezakan semantik Objek yang serupa tetapi mempunyai rupa yang berbeza.
Padanan Geometri - Mengambil kira faktor seperti bentuk dan perbezaan saiz objek yang berbeza, ISM turut mereka bentuk skor padanan geometri. Purata putaran yang sepadan dengan templat padanan terbaik dan awan titik objek calon boleh memberikan pose objek kasar, dan kotak sempadan boleh diperolehi dengan mengubah dan menayang model CAD objek menggunakan pose ini secara tegar. Kira nisbah persilangan atas kesatuan (IoU) antara kotak pembanding dan kotak pembanding calon untuk mendapatkan skor padanan geometri.
Model Anggaran Pose (PEM)
Untuk setiap objek calon yang sepadan dengan objek sasaran, SAM-6D menggunakan Model Anggaran Pose (PEM) untuk meramalkan pose 6Dnya berbanding model CAD objek.
denote Titik pensampelan set objek calon yang tersegmentasi dan model CAD objek sebagai  dan
dan  masing -masing, di mana N_M dan N_O mewakili bilangan mata mereka; dinyatakan sebagai
masing -masing, di mana N_M dan N_O mewakili bilangan mata mereka; dinyatakan sebagai  dan
dan  , C mewakili bilangan saluran ciri tersebut. Matlamat PEM adalah untuk mendapatkan matriks tugasan yang mewakili surat-menyurat setempat-ke-tempatan daripada P_m ke P_o disebabkan oleh oklusi, P_o hanya padanan sebahagiannya P_m dan disebabkan oleh ketidaktepatan segmentasi dan hingar penderia, P_m hanya padanan separa DAN padanan. P_o.
, C mewakili bilangan saluran ciri tersebut. Matlamat PEM adalah untuk mendapatkan matriks tugasan yang mewakili surat-menyurat setempat-ke-tempatan daripada P_m ke P_o disebabkan oleh oklusi, P_o hanya padanan sebahagiannya P_m dan disebabkan oleh ketidaktepatan segmentasi dan hingar penderia, P_m hanya padanan separa DAN padanan. P_o.
Untuk menyelesaikan masalah menetapkan mata tidak bertindih antara dua set titik, ISM melengkapkan mereka dengan Token Latar Belakang, direkodkan sebagai  dan
dan  , yang boleh mewujudkan surat-menyurat tempatan-ke-tempatan dengan berkesan berdasarkan persamaan ciri. Secara khusus, matriks perhatian boleh dikira terlebih dahulu seperti berikut:
, yang boleh mewujudkan surat-menyurat tempatan-ke-tempatan dengan berkesan berdasarkan persamaan ciri. Secara khusus, matriks perhatian boleh dikira terlebih dahulu seperti berikut:

Kemudian matriks pengedaran

 dan
dan  operasi masing-masing mewakili lajur
operasi masing-masing mewakili lajur 
 mewakili pemalar. Nilai setiap baris dalam
mewakili pemalar. Nilai setiap baris dalam
Setelah  dikira, semua pasangan mata padanan {(P_m,P_o)} dan markah padanan mereka boleh dikumpulkan, dan akhirnya SVD berwajaran digunakan untuk mengira pose objek.
dikira, semua pasangan mata padanan {(P_m,P_o)} dan markah padanan mereka boleh dikumpulkan, dan akhirnya SVD berwajaran digunakan untuk mengira pose objek.
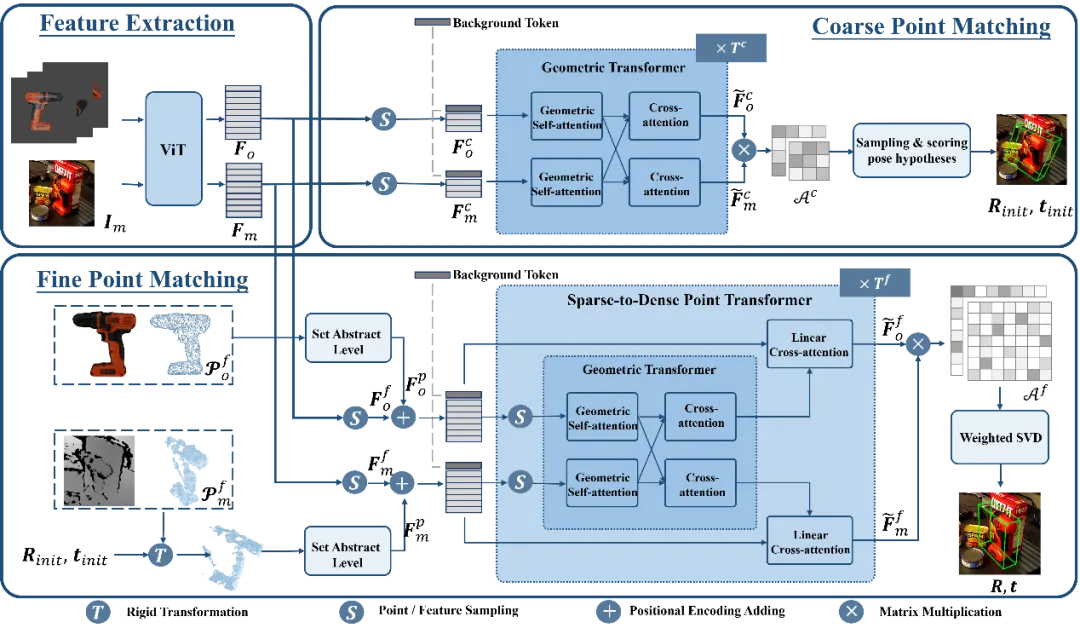
Rajah 3. Gambarajah skematik Model Anggaran Pose (PEM) dalam SAM-6D
Menggunakan strategi berasaskan Token Latar Belakang yang disebutkan di atas, dua peringkat padanan set mata direka bentuk, dan peringkat struktur modelnya adalah seperti yang ditunjukkan dalam rajah Seperti yang ditunjukkan dalam 3, ia mengandungi tiga modul: pengekstrakan ciri, padanan set titik kasar dan padanan set titik halus.
Modul padanan set titik kasar melaksanakan surat-menyurat jarang untuk mengira pose objek awal, dan kemudian menggunakan pose ini untuk mengubah set titik objek calon untuk mencapai pembelajaran pengekodan kedudukan.
Modul padanan set titik halus menggabungkan pengekodan kedudukan set titik sampel objek calon dan objek sasaran, dengan itu menyuntik korespondensi kasar pada peringkat pertama dan seterusnya mewujudkan korespondensi padat untuk mendapatkan pose objek yang lebih tepat. Untuk mempelajari interaksi padat secara berkesan pada peringkat ini, PEM memperkenalkan pengubah set titik jarang ke padat novel, yang melaksanakan interaksi pada versi jarang ciri padat, dan menggunakan Pengubah Linear [5] untuk mengubah ciri jarang dipertingkatkan kepada Diffusion back. menjadi ciri padat.
Hasil eksperimen
Untuk dua sub-model SAM-6D, model segmentasi instance (ISM) dibina berdasarkan SAM tanpa memerlukan latihan semula rangkaian dan finetune, manakala model anggaran pose (PEM) Set data sintetik ShapeNet-Objects dan Google-Scanned-Objects yang disediakan oleh MegaPose [4] digunakan untuk latihan.
Untuk mengesahkan keupayaan sampel sifarnya, SAM-6D telah diuji pada tujuh set data teras BOP [2], termasuk LM-O, T-LESS, TUD-L, IC-BIN, ITODD, HB dan YCB -V. Jadual 1 dan 2 menunjukkan perbandingan pembahagian contoh dan keputusan anggaran pose kaedah berbeza pada tujuh set data ini, masing-masing. Berbanding dengan kaedah lain, SAM-6D berprestasi sangat baik pada kedua-dua kaedah, menunjukkan sepenuhnya keupayaan generalisasi yang kuat.
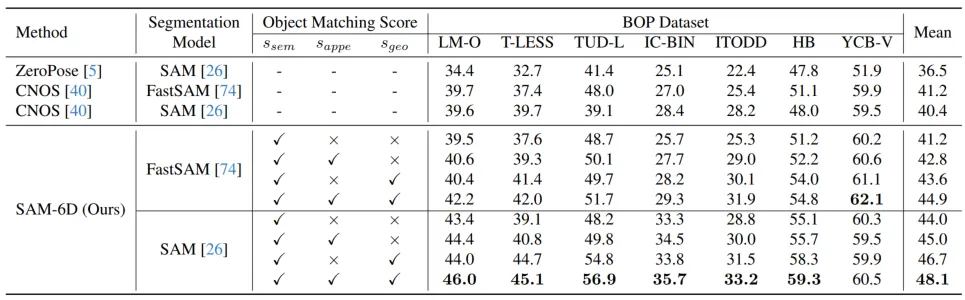
Jadual 1. Perbandingan hasil segmentasi contoh kaedah berbeza pada tujuh set data teras BOP
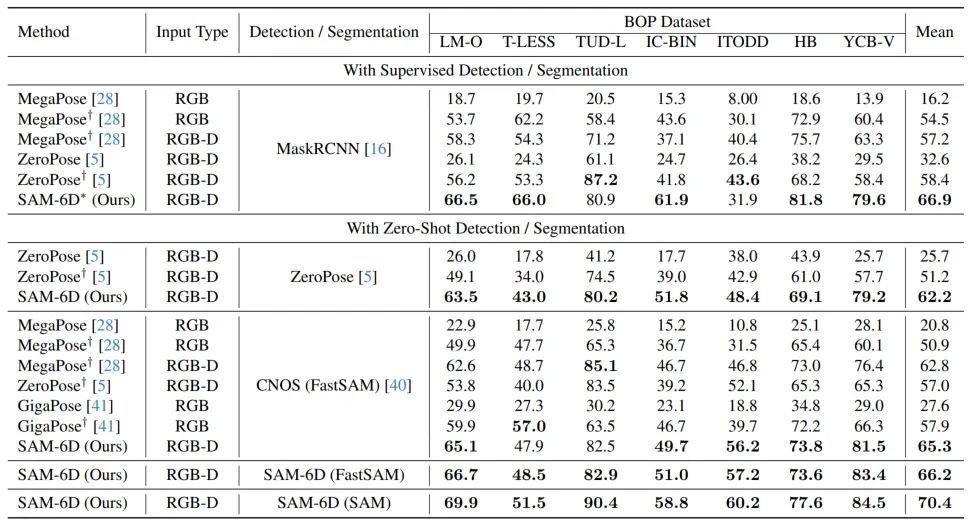
Jadual 2. Hasil perbandingan tujuh set data teras pada kaedah pose berbeza BOP
Rajah 4 menunjukkan hasil visualisasi segmentasi pengesanan dan anggaran pose 6D SAM-6D pada tujuh set data BOP, dengan (a) dan (b) masing-masing adalah imej RGB dan peta kedalaman yang diuji, (c) ialah objek sasaran yang diberikan, manakala (d) dan (e) masing-masing adalah hasil visualisasi segmentasi pengesanan dan pose 6D.
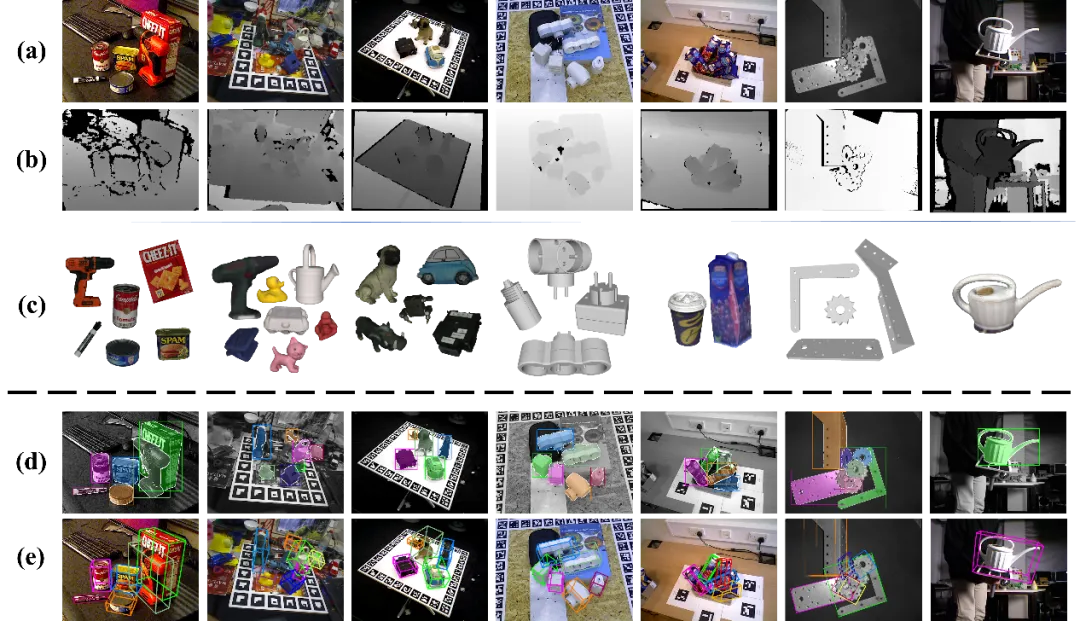
Rajah 4. Hasil visualisasi SAM-6D pada tujuh set data teras BOP.
Untuk butiran pelaksanaan lanjut SAM-6D, dialu-alukan untuk membaca kertas asal.
Atas ialah kandungan terperinci Rangka kerja anggaran pose objek 6D sampel sifar SAM-6D, satu langkah lebih dekat kepada kecerdasan yang terkandung. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

AI Hentai Generator
Menjana ai hentai secara percuma.

Artikel Panas
Alat panas

Notepad++7.3.1
Editor kod yang mudah digunakan dan percuma

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

Hantar Studio 13.0.1
Persekitaran pembangunan bersepadu PHP yang berkuasa

Dreamweaver CS6
Alat pembangunan web visual

SublimeText3 versi Mac
Perisian penyuntingan kod peringkat Tuhan (SublimeText3)
Topik panas
 1382
1382
 52
52

 Baris arahan shutdown centos
Apr 14, 2025 pm 09:12 PM
Baris arahan shutdown centos
Apr 14, 2025 pm 09:12 PM
Perintah shutdown CentOS adalah penutupan, dan sintaks adalah tutup [pilihan] [maklumat]. Pilihan termasuk: -h menghentikan sistem dengan segera; -P mematikan kuasa selepas penutupan; -r mulakan semula; -T Waktu Menunggu. Masa boleh ditentukan sebagai segera (sekarang), minit (minit), atau masa tertentu (HH: mm). Maklumat tambahan boleh dipaparkan dalam mesej sistem.
 Apakah kaedah sandaran untuk gitlab di centos
Apr 14, 2025 pm 05:33 PM
Apakah kaedah sandaran untuk gitlab di centos
Apr 14, 2025 pm 05:33 PM
Dasar sandaran dan pemulihan Gitlab di bawah sistem CentOS untuk memastikan keselamatan data dan pemulihan, Gitlab pada CentOS menyediakan pelbagai kaedah sandaran. Artikel ini akan memperkenalkan beberapa kaedah sandaran biasa, parameter konfigurasi dan proses pemulihan secara terperinci untuk membantu anda menubuhkan strategi sandaran dan pemulihan GitLab lengkap. 1. Backup Manual Gunakan Gitlab-Rakegitlab: Backup: Buat Perintah untuk Melaksanakan Backup Manual. Perintah ini menyokong maklumat utama seperti repositori Gitlab, pangkalan data, pengguna, kumpulan pengguna, kunci, dan kebenaran. Fail sandaran lalai disimpan dalam direktori/var/opt/gitlab/sandaran. Anda boleh mengubah suai /etc /gitlab
 Cara Memeriksa Konfigurasi HDFS CentOS
Apr 14, 2025 pm 07:21 PM
Cara Memeriksa Konfigurasi HDFS CentOS
Apr 14, 2025 pm 07:21 PM
Panduan Lengkap untuk Memeriksa Konfigurasi HDFS Dalam Sistem CentOS Artikel ini akan membimbing anda bagaimana untuk memeriksa konfigurasi dan menjalankan status HDFS secara berkesan pada sistem CentOS. Langkah -langkah berikut akan membantu anda memahami sepenuhnya persediaan dan operasi HDFS. Sahkan Pembolehubah Alam Sekitar Hadoop: Pertama, pastikan pembolehubah persekitaran Hadoop ditetapkan dengan betul. Di terminal, laksanakan arahan berikut untuk mengesahkan bahawa Hadoop dipasang dan dikonfigurasi dengan betul: Hadoopversion Semak fail konfigurasi HDFS: Fail konfigurasi teras HDFS terletak di/etc/hadoop/conf/direktori, di mana core-site.xml dan hdfs-site.xml adalah kritikal. gunakan
 Apakah kaedah penalaan prestasi zookeeper di CentOS
Apr 14, 2025 pm 03:18 PM
Apakah kaedah penalaan prestasi zookeeper di CentOS
Apr 14, 2025 pm 03:18 PM
Penalaan prestasi zookeeper pada centOs boleh bermula dari pelbagai aspek, termasuk konfigurasi perkakasan, pengoptimuman sistem operasi, pelarasan parameter konfigurasi, pemantauan dan penyelenggaraan, dan lain -lain. Memori yang cukup: memperuntukkan sumber memori yang cukup untuk zookeeper untuk mengelakkan cakera kerap membaca dan menulis. CPU multi-teras: Gunakan CPU multi-teras untuk memastikan bahawa zookeeper dapat memprosesnya selari.
 Cara Melatih Model Pytorch di CentOs
Apr 14, 2025 pm 03:03 PM
Cara Melatih Model Pytorch di CentOs
Apr 14, 2025 pm 03:03 PM
Latihan yang cekap model pytorch pada sistem CentOS memerlukan langkah -langkah, dan artikel ini akan memberikan panduan terperinci. 1. Penyediaan Persekitaran: Pemasangan Python dan Ketergantungan: Sistem CentOS biasanya mempamerkan python, tetapi versi mungkin lebih tua. Adalah disyorkan untuk menggunakan YUM atau DNF untuk memasang Python 3 dan menaik taraf PIP: Sudoyumupdatepython3 (atau SudodnfupdatePython3), pip3install-upgradepip. CUDA dan CUDNN (Percepatan GPU): Jika anda menggunakan Nvidiagpu, anda perlu memasang Cudatool
 Bagaimana sokongan GPU untuk Pytorch di CentOS
Apr 14, 2025 pm 06:48 PM
Bagaimana sokongan GPU untuk Pytorch di CentOS
Apr 14, 2025 pm 06:48 PM
Membolehkan pecutan GPU pytorch pada sistem CentOS memerlukan pemasangan cuda, cudnn dan GPU versi pytorch. Langkah-langkah berikut akan membimbing anda melalui proses: Pemasangan CUDA dan CUDNN Tentukan keserasian versi CUDA: Gunakan perintah NVIDIA-SMI untuk melihat versi CUDA yang disokong oleh kad grafik NVIDIA anda. Sebagai contoh, kad grafik MX450 anda boleh menyokong CUDA11.1 atau lebih tinggi. Muat turun dan pasang Cudatoolkit: Lawati laman web rasmi Nvidiacudatoolkit dan muat turun dan pasang versi yang sepadan mengikut versi CUDA tertinggi yang disokong oleh kad grafik anda. Pasang Perpustakaan Cudnn:
 Penjelasan terperinci mengenai Prinsip Docker
Apr 14, 2025 pm 11:57 PM
Penjelasan terperinci mengenai Prinsip Docker
Apr 14, 2025 pm 11:57 PM
Docker menggunakan ciri -ciri kernel Linux untuk menyediakan persekitaran berjalan yang cekap dan terpencil. Prinsip kerjanya adalah seperti berikut: 1. Cermin digunakan sebagai templat baca sahaja, yang mengandungi semua yang anda perlukan untuk menjalankan aplikasi; 2. Sistem Fail Kesatuan (Unionfs) menyusun pelbagai sistem fail, hanya menyimpan perbezaan, menjimatkan ruang dan mempercepatkan; 3. Daemon menguruskan cermin dan bekas, dan pelanggan menggunakannya untuk interaksi; 4. Ruang nama dan cgroups melaksanakan pengasingan kontena dan batasan sumber; 5. Pelbagai mod rangkaian menyokong interkoneksi kontena. Hanya dengan memahami konsep -konsep teras ini, anda boleh menggunakan Docker dengan lebih baik.
 Cara Memilih Versi PyTorch Di Bawah Centos
Apr 14, 2025 pm 02:51 PM
Cara Memilih Versi PyTorch Di Bawah Centos
Apr 14, 2025 pm 02:51 PM
Apabila memilih versi pytorch di bawah CentOS, faktor utama berikut perlu dipertimbangkan: 1. Keserasian versi CUDA Sokongan GPU: Jika anda mempunyai NVIDIA GPU dan ingin menggunakan pecutan GPU, anda perlu memilih pytorch yang menyokong versi CUDA yang sepadan. Anda boleh melihat versi CUDA yang disokong dengan menjalankan arahan NVIDIA-SMI. Versi CPU: Jika anda tidak mempunyai GPU atau tidak mahu menggunakan GPU, anda boleh memilih versi CPU PyTorch. 2. Pytorch versi python
