
 Peranti teknologi
AI
Kecekapan meningkat sebanyak 16 kali ganda! VRSO: Anotasi 3D objek statik visual semata-mata, membuka gelung tertutup data!
Peranti teknologi
AI
Kecekapan meningkat sebanyak 16 kali ganda! VRSO: Anotasi 3D objek statik visual semata-mata, membuka gelung tertutup data!
Kecekapan meningkat sebanyak 16 kali ganda! VRSO: Anotasi 3D objek statik visual semata-mata, membuka gelung tertutup data!

Kematian Pelabelan
Pengesanan Objek Statik (SOD), termasuk lampu isyarat, tanda panduan dan kon trafik, kebanyakan algoritma adalah rangkaian neural dalam dipacu data dan memerlukan sejumlah besar data latihan. Amalan semasa biasanya melibatkan anotasi manual bagi sejumlah besar sampel latihan pada data awan titik yang diimbas LiDAR untuk membetulkan kes ekor panjang.
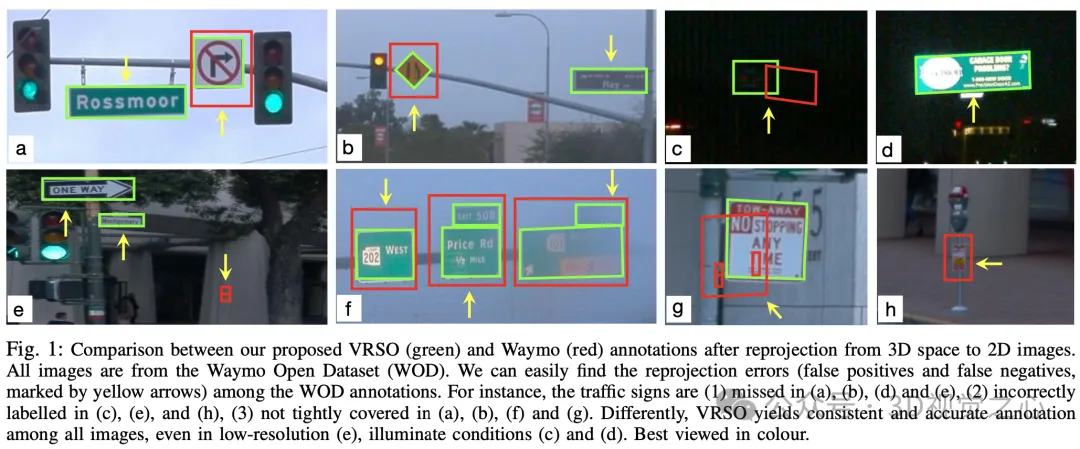
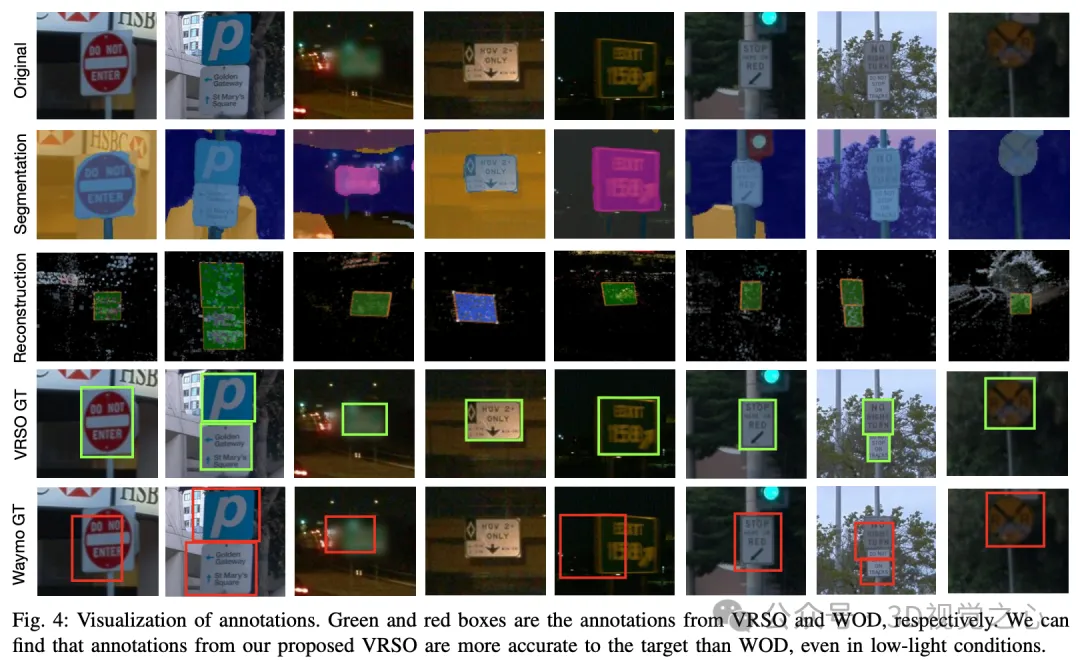
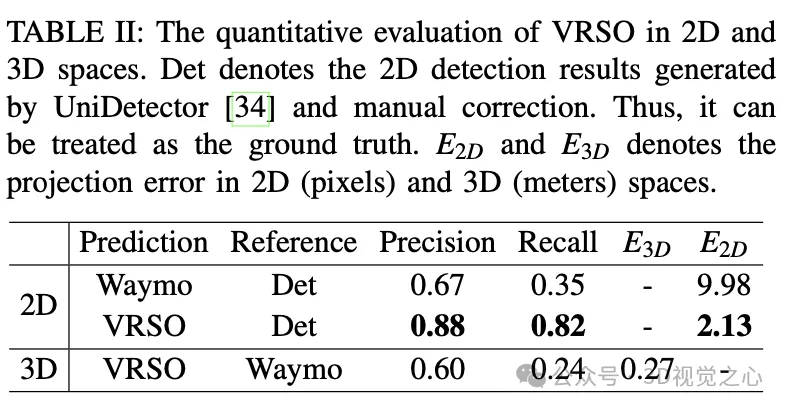
Anotasi manual sukar untuk menangkap kebolehubahan dan kerumitan adegan sebenar, dan selalunya gagal mengambil kira oklusi, keadaan pencahayaan yang berbeza dan sudut tontonan yang pelbagai (anak panah kuning dalam Rajah 1). Keseluruhan proses mempunyai pautan yang panjang, sangat memakan masa, mudah ralat, dan mahal (Rajah 2). Jadi pada masa ini syarikat sedang mencari penyelesaian pelabelan automatik, terutamanya berdasarkan penglihatan tulen Lagipun, tidak setiap kereta mempunyai lidar. . ialah 2.6 piksel, kira-kira satu perempat daripada anotasi Waymo (10.6 piksel)
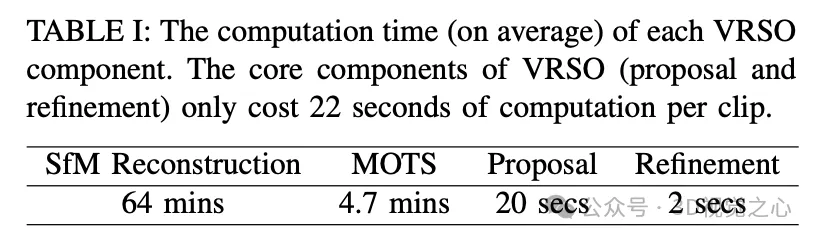
Berbanding dengan anotasi manual, kelajuan meningkat kira-kira 16 kali ganda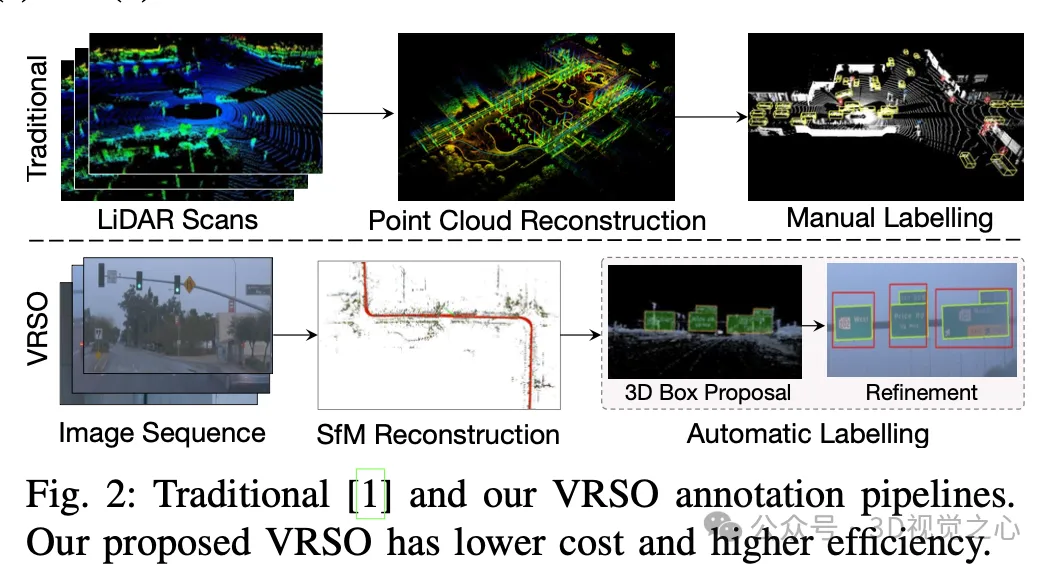
Daripada Rajah 1, berbanding dengan hasil anotasi manual set data Terbuka Waymo, VRSO menunjukkan keteguhan dan ketepatan geometri yang lebih tinggi.
- (Anda semua telah melihat ini, mengapa tidak leret ke atas dengan ibu jari anda dan klik pada kad di bahagian atas untuk mengikuti saya, Seluruh operasi hanya akan membawa anda 1.328 saat, dan kemudian mengambil semua maklumat berguna dalam masa depan, sekiranya ia berguna~
- )
Penyelesaian masalah
Sistem VRSO terbahagi terutamanya kepada dua bahagian:Pembinaan semula adegan dan Anotasi objek statik
.Bahagian pembinaan semula bukan fokus, ia berdasarkan algoritma SFM untuk memulihkan pose imej dan titik utama 3D yang jarang. Algoritma pelabelan objek statik, digabungkan dengan kod pseudo, proses umum adalah (perkara berikut akan diperincikan langkah demi langkah):
Menggunakan algoritma pengesanan dan segmentasi objek 2D siap sedia untuk menjana calon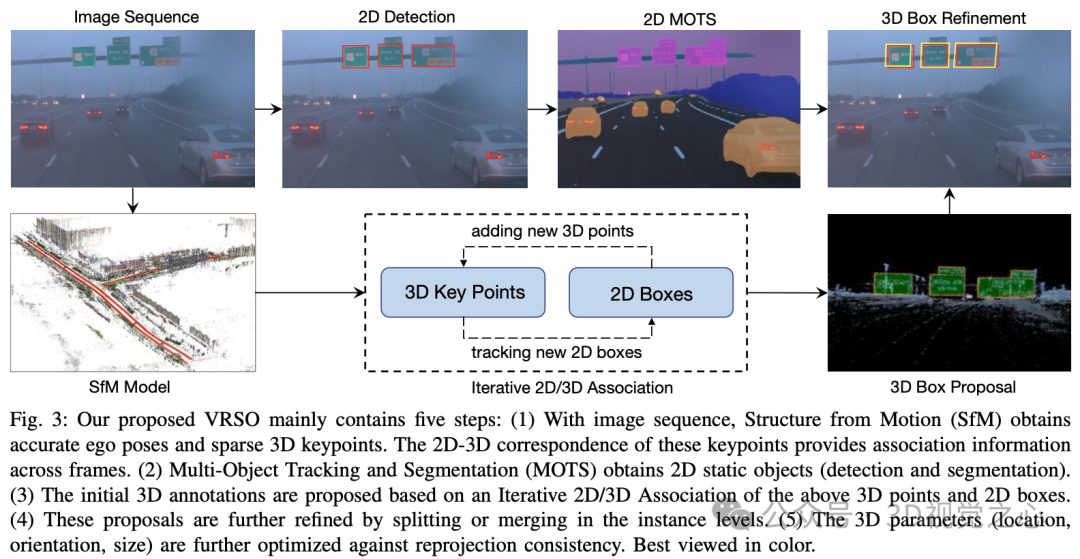 Menggunakan 3D-2D surat-menyurat titik penting dalam model SFM Perhubungan untuk menjejak kejadian 2D merentas bingkai
Menggunakan 3D-2D surat-menyurat titik penting dalam model SFM Perhubungan untuk menjejak kejadian 2D merentas bingkai
Memperkenalkan konsistensi unjuran semula untuk mengoptimumkan parameter anotasi 3D objek statik
- 1. Menjejak hubungan 🜎 aries berdasarkan perkara utama titik 3D model SFM dalam kotak.
- langkah 2: Kira koordinat setiap titik 3D pada peta 2D berdasarkan hubungan padanan 2D-3D.
langkah 3: Tentukan tika yang sepadan bagi titik 3D pada peta 2D semasa berdasarkan koordinat peta 2D dan titik sudut pembahagian contoh. 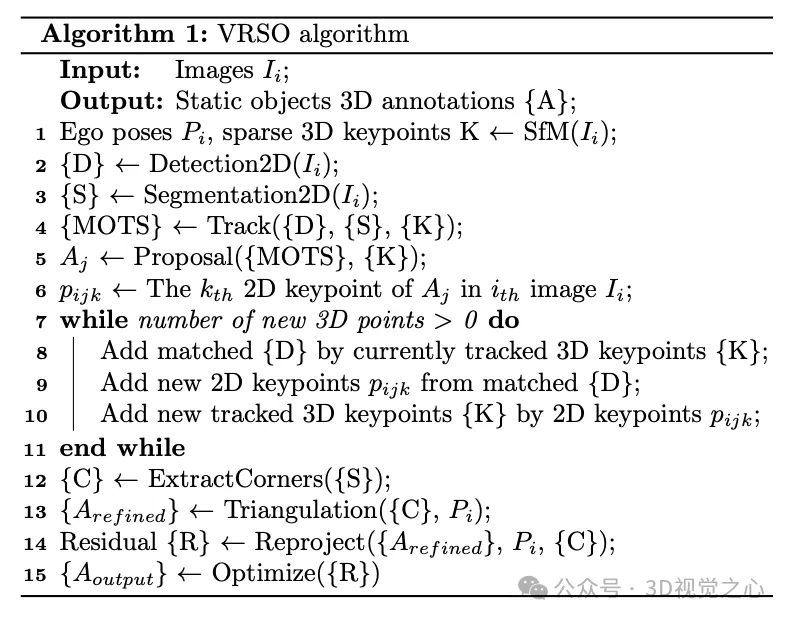
2.cadangan menjana
- untuk memulakan parameter kotak 3D (kedudukan, arah, saiz) objek statik untuk keseluruhan klip video. Setiap titik utama SFM mempunyai kedudukan 3D yang tepat dan imej 2D yang sepadan. Untuk setiap contoh 2D, titik ciri dalam topeng contoh 2D diekstrak. Kemudian, satu set titik kunci 3D yang sepadan boleh dianggap sebagai calon untuk kotak sempadan 3D.
- Sebuah papan tanda jalan diwakili sebagai segi empat tepat dengan orientasi dalam ruang, yang mempunyai 6 darjah kebebasan, termasuk terjemahan (,,), orientasi (
- θ ) dan saiz (lebar dan tinggi). Memandangkan kedalamannya, lampu isyarat mempunyai 7 darjah kebebasan. Kon trafik diwakili sama dengan lampu isyarat.
-
3.cadangan memperhalusi
- langkah 1: Ekstrak garis besar setiap objek statik daripada pembahagian contoh 2D.
- langkah 2: Pasangkan kotak sempadan berorientasikan minimum (OBB) untuk kontur kontur.
- langkah 3: Ekstrak bucu kotak sempadan minimum.
- langkah 4: Kira arah berdasarkan bucu dan titik tengah, dan tentukan susunan bucu.
- langkah 5: Proses pembahagian dan penggabungan dilakukan berdasarkan hasil pengesanan 2D dan pembahagian contoh.
- langkah 6: Kesan dan tolak pemerhatian yang mengandungi oklusi. Mengekstrak bucu daripada topeng pembahagian contoh 2D memerlukan keempat-empat penjuru setiap tanda boleh dilihat. Jika terdapat oklusi, kotak sempadan sejajar paksi (AABB) diekstrak daripada pembahagian contoh dan nisbah kawasan antara AABB dan kotak pengesanan 2D dikira. Jika tiada oklusi, kedua-dua kaedah pengiraan kawasan ini hendaklah rapat.

4. Triangulasi
Dapatkan nilai bucu awal objek statik di bawah keadaan 3D melalui triangulasi.
Dengan menyemak bilangan titik kunci dalam kotak sempadan 3D yang diperolehi oleh SFM dan segmentasi tika semasa pembinaan semula pemandangan, hanya kejadian dengan bilangan titik kunci melebihi ambang dianggap pemerhatian yang stabil dan sah. Untuk keadaan ini, kotak sempadan 2D yang sepadan dianggap sebagai pemerhatian yang sah. Melalui pemerhatian 2D ke atas berbilang imej, bucu kotak sempadan 2D ditriangulasi untuk mendapatkan koordinat kotak sempadan.
Untuk tanda bulat yang tidak membezakan bucu "kiri bawah, kiri atas, kanan atas, kanan atas, dan kanan bawah" pada topeng, tanda bulat ini perlu dikenal pasti. Hasil pengesanan 2D digunakan sebagai pemerhatian objek bulat, dan topeng segmentasi contoh 2D digunakan untuk pengekstrakan kontur. Titik tengah dan jejari dikira melalui algoritma pemadanan kuasa dua terkecil. Parameter tanda bulat termasuk titik tengah (,,), arah (θ) dan jejari ().
5. Perhalusi penjejakan
Padanan titik ciri penjejakan berdasarkan SFM. Tentukan sama ada hendak menggabungkan kejadian berasingan ini berdasarkan jarak Euclidean bucu kotak sempadan 3D dan unjuran kotak sempadan 2D IoU. Setelah penggabungan selesai, titik ciri 3D dalam contoh boleh dikelompokkan untuk mengaitkan lebih banyak titik ciri 2D. Perkaitan 2D-3D berulang dilakukan sehingga tiada titik ciri 2D boleh ditambah.
6. Pengoptimuman parameter akhir
Mengambil tanda segi empat tepat sebagai contoh, parameter yang boleh dioptimumkan termasuk kedudukan (,,), arah (θ) dan saiz (,), dengan jumlah enam darjah kebebasan. Langkah utama termasuk:
- Tukar enam darjah kebebasan kepada empat titik 3D dan hitung matriks putaran.
- Projek empat mata 3D yang telah ditukar pada imej 2D.
- Kira baki antara hasil unjuran dan hasil titik sudut yang diperolehi melalui segmentasi contoh.
- Gunakan Huber untuk pengoptimuman dan kemas kini parameter kotak pembatas
Kesan anotasi
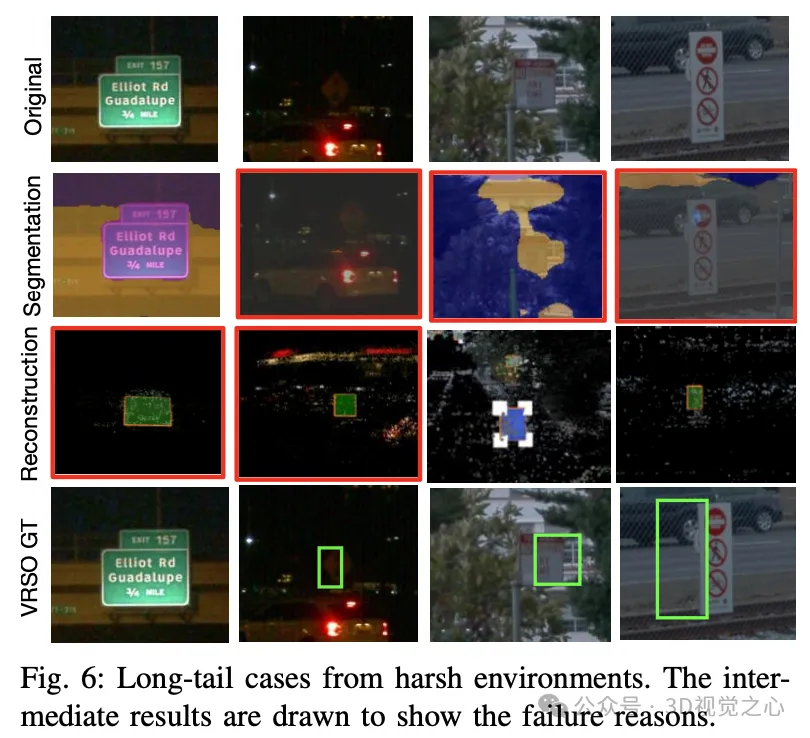
Terdapat juga dalam beberapa kes yang sangat ringan dan berpanjangan.
Untuk meringkaskan
Rangka kerja VRSO mencapai ketepatan tinggi dan anotasi 3D objek statik yang konsisten, menyepadukan pengesanan, segmentasi dan algoritma SFM dengan ketat, menghapuskan campur tangan manual dalam pemacuan pintar berasaskan LiDAR, Keputusan dan menyediakan anotasi boleh kompaun berasaskan LiDAR kepada anotasi manual. Penilaian kualitatif dan kuantitatif telah dijalankan dengan Set Data Terbuka Waymo yang diiktiraf secara meluas: berbanding dengan anotasi manual, kelajuan meningkat kira-kira 16 kali ganda, sambil mengekalkan ketekalan dan ketepatan yang terbaik.

Atas ialah kandungan terperinci Kecekapan meningkat sebanyak 16 kali ganda! VRSO: Anotasi 3D objek statik visual semata-mata, membuka gelung tertutup data!. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

AI Hentai Generator
Menjana ai hentai secara percuma.

Artikel Panas
Alat panas

Notepad++7.3.1
Editor kod yang mudah digunakan dan percuma

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

Hantar Studio 13.0.1
Persekitaran pembangunan bersepadu PHP yang berkuasa

Dreamweaver CS6
Alat pembangunan web visual

SublimeText3 versi Mac
Perisian penyuntingan kod peringkat Tuhan (SublimeText3)
Topik panas
 1377
1377
 52
52

 Reka bentuk sut memburu, sedan perdana mewah pintar baharu: DENZA Z9GT syot sebenar
Apr 22, 2024 pm 02:10 PM
Reka bentuk sut memburu, sedan perdana mewah pintar baharu: DENZA Z9GT syot sebenar
Apr 22, 2024 pm 02:10 PM
Menurut berita pada 22 April, pagi ini, model perdana baharu Denza Z9GT membuat penampilan sulungnya Sekarang saya ingin berkongsi dengan anda beberapa gambar kehidupan sebenar. Menurut pengenalan rasmi, kereta baharu itu diletakkan sebagai sedan mewah pintar, dengan panjang 5180mm mencapai tahap sedan mewah kelas D, Wolfgang Egger, mengetuai usaha untuk mencipta penampilan itu dilengkapi dengan teknologi hitam "e³", pelbagai lidar dan konfigurasi lain , dengan hampir seribu kuasa kuda. Dari segi reka bentuk, Denza Z9GT menggabungkan estetika Timur dan Barat dengan sempurna, dengan muka hadapan yang menarik perhatian. Di bahagian sisi badan kereta, garisan hiasan berbentuk "Z" adalah indah dan licin, dan pusat graviti badan kereta agak jauh ke belakang, mewujudkan postur condong ke belakang, yang sangat sporty. Bahagian belakang kenderaan adalah bulat dan penuh, dan lampu belakang memanjang dari tengah ke kedua-dua sisi, menggemakan sayap ekor elektrik, membawa tahap pengiktirafan yang tinggi kepada keseluruhan kenderaan. bernilai
 Tank 300Hi4-T membuat penampilan sulung yang kukuh: gabungan sempurna antara luar jalan dan kecerdasan
Apr 23, 2024 pm 06:16 PM
Tank 300Hi4-T membuat penampilan sulung yang kukuh: gabungan sempurna antara luar jalan dan kecerdasan
Apr 23, 2024 pm 06:16 PM
Menurut berita pada 23 April, baru-baru ini, Great Wall Tank 300Hi4-T yang dinanti-nantikan akhirnya secara rasmi mendarat di pasaran. Model ini telah menarik perhatian meluas kerana konfigurasinya yang unik dan kekurangan yang terhad. Dilaporkan bahawa hanya satu konfigurasi Tank 300Hi4-T dilancarkan kali ini, dengan harga runcit yang disyorkan sebanyak 269,800 yuan, dan hanya 3,000 unit tersedia untuk dijual. Dari sudut reka bentuk penampilan, Tank 300Hi4-T menunjukkan suasana luar jalan yang kukuh. Ia menggunakan casis luar jalan profesional dengan badan tidak menanggung beban, yang menunjukkan bahawa kestabilan kenderaan dan keupayaan luar jalan bertambah baik. Di bahagian hadapan kereta, set lampu bulat ikonik melengkapkan gril mendatar tiga bingkai, dan gril hadapan bersalut krom perak menjadikan kenderaan kelihatan lebih lasak dan berkuasa. Gerbang roda dan cermin luaran dalam warna yang sama dengan badan menambah pada kereta ini
 Xiangjie S9 membuat penampilan sulung di Pameran Auto Beijing, Huawei dan sedan elektrik tulen pertama BAIC Blue Valley akan mula diperkenalkan
Apr 23, 2024 pm 01:13 PM
Xiangjie S9 membuat penampilan sulung di Pameran Auto Beijing, Huawei dan sedan elektrik tulen pertama BAIC Blue Valley akan mula diperkenalkan
Apr 23, 2024 pm 01:13 PM
Berita pada 23 April: Menurut laporan terkini, sedan elektrik tulen yang dinanti-nantikan Enjoy S9 akan menemui orang ramai buat kali pertama di Pameran Auto Beijing yang akan datang. Kereta ini adalah karya ciptaan bersama BAIC Blue Valley dan Huawei untuk kedua-dua syarikat gergasi industri Ia diletakkan dalam pasaran sedan sederhana dan besar dan dijangka dijual pada harga tidak kurang daripada 500,000 yuan. S9 baru-baru ini telah menyelesaikan proses permohonan yang berkaitan dengan Kementerian Perindustrian dan Teknologi Maklumat, menunjukkan bahawa pelancaran rasminya semakin hampir. Berdasarkan maklumat yang terdedah, kereta baharu itu mempunyai reka bentuk luaran yang menarik, menggunakan kumpulan lampu LED jenis melalui moden, dengan tiga set sumber cahaya diagihkan secara halus dalam kumpulan lampu depan. Jeriji hadapannya yang tertutup dan reka bentuk bolong pelesapan haba surround depan yang menarik perhatian mewujudkan perangai yang stabil lagi bergaya. Editor data memahami dan menikmati garis sisi yang elegan pada badan S9.
 Generasi baharu Great Wall Haval H6 dan H9 akan diperkenalkan di Pameran Auto Beijing 2024
Apr 25, 2024 pm 07:07 PM
Generasi baharu Great Wall Haval H6 dan H9 akan diperkenalkan di Pameran Auto Beijing 2024
Apr 25, 2024 pm 07:07 PM
Pada 25 April 2024, Great Wall Haval membuat penampilan hebat di Pameran Automobil Antarabangsa Beijing ke-18 dengan Haval H6 generasi baharu, Haval H9 generasi baharu, Haval Raptor 2024 dan model bintang lain. China Haval dipercayai di peringkat global, dan jenama Haval sedang mempercepatkan usaha mengejar pasaran global Pada pameran kereta ini, Great Wall Haval mengambil "China Haval, Global Trust" sebagai temanya, menafsirkan sepenuhnya komitmen padu jenama Haval kepada pengguna. "pakar SUV global". Great Wall Haval telah terlibat secara mendalam dalam bidang SUV selama 13 tahun, didorong oleh inovasi teknologi, menggunakan keupayaan produk teras tegar dan perkhidmatan yang boleh dipercayai untuk menyediakan pengguna dengan produk SUV berkualiti tinggi. Daripada menerajui China hingga menjadi global, Great Wall Haval terus mencipta pengalaman produk SUV yang cemerlang, bertindak balas terhadap jangkaan dan kepercayaan lebih ramai pengguna, dan menulis globalisasi jenama China.
 Yang terbaru dari Universiti Oxford! Mickey: Padanan imej 2D dalam SOTA 3D! (CVPR\'24)
Apr 23, 2024 pm 01:20 PM
Yang terbaru dari Universiti Oxford! Mickey: Padanan imej 2D dalam SOTA 3D! (CVPR\'24)
Apr 23, 2024 pm 01:20 PM
Pautan projek ditulis di hadapan: https://nianticlabs.github.io/mickey/ Memandangkan dua gambar, pose kamera di antara mereka boleh dianggarkan dengan mewujudkan kesesuaian antara gambar. Biasanya, surat-menyurat ini adalah 2D hingga 2D, dan anggaran pose kami adalah skala-tak tentu. Sesetengah aplikasi, seperti realiti tambahan segera pada bila-bila masa, di mana-mana sahaja, memerlukan anggaran pose metrik skala, jadi mereka bergantung pada penganggar kedalaman luaran untuk memulihkan skala. Makalah ini mencadangkan MicKey, proses pemadanan titik utama yang mampu meramalkan korespondensi metrik dalam ruang kamera 3D. Dengan mempelajari padanan koordinat 3D merentas imej, kami dapat membuat kesimpulan relatif metrik
 Menyokong NOA untuk bandar yang tidak bergambar, jenama Great Wall Wei Blue Mountain Smart Driving Edition dijangka akan dikeluarkan secara rasmi pada bulan Jun
May 09, 2024 pm 09:10 PM
Menyokong NOA untuk bandar yang tidak bergambar, jenama Great Wall Wei Blue Mountain Smart Driving Edition dijangka akan dikeluarkan secara rasmi pada bulan Jun
May 09, 2024 pm 09:10 PM
Menurut laporan pada 9 Mei 2024, pada Pameran Auto Antarabangsa Beijing tahun ini, Wei Brand, anak syarikat Great Wall Motors, melancarkan model baharu - Edisi Pemanduan Pintar Blue Mountain, yang menarik perhatian ramai pengunjung. Menurut "Mengetahui Visi Maharaja Kereta", kereta baharu yang dinanti-nantikan ini dijangka akan mendarat secara rasmi di pasaran pada Jun tahun ini. Reka bentuk Blue Mountain Smart Driving Edition terus mengikuti penampilan klasik Blue Mountain DHT-PHEV yang dijual, tetapi ia telah dinaik taraf dengan ketara dari segi persepsi pemanduan pintar. Perkara yang paling menarik perhatian ialah lidar gaya menara pemerhati dipasang di atas bumbung Pada masa yang sama, kenderaan itu juga dilengkapi dengan radar gelombang 3 milimeter dan 12 radar ultrasonik, serta 11 kamera persepsi visual definisi tinggi. untuk sejumlah 27 Penderia pemanduan Berbantu sangat meningkatkan keupayaan persepsi persekitaran kenderaan. mengikut
 Denza Z9GT akan debut di Pameran Auto Beijing 2024, dan harganya di luar negara mungkin melebihi satu juta yuan
Apr 25, 2024 pm 07:52 PM
Denza Z9GT akan debut di Pameran Auto Beijing 2024, dan harganya di luar negara mungkin melebihi satu juta yuan
Apr 25, 2024 pm 07:52 PM
Pada 25 April, Pameran Automobil Antarabangsa Beijing ke-18 secara rasminya bermula dengan penampilan yang menakjubkan di Hall W4 dengan matriks produk mewah pintar yang paling berkuasa dalam sejarah Gerai itu penuh sesak dengan orang ramai tunjuk di Pameran Auto Beijing ini! Antaranya, Denza Z9GT membuat kemunculan pertama di dunia. Kereta baharu itu diposisikan sebagai sedan mewah pintar. Ia adalah satu lagi karya terbaik Wolfgang Egger, pengarah reka bentuk BYD Group Yi Sanfang, mendahului Aliran baharu elektrifikasi kereta mewah. Diterajui oleh Iger dan diperkasakan oleh teknologi yang mengganggu, Denza Z9GT menjadi tumpuan pameran kereta tahun ini Sebagai model pertama konsep reka bentuk baharu Denza "Elegance in motion", penampilan Denza Z9GT diketuai oleh Eger dan direka dengan sempurna. .
 Wenjie M9 menolak peningkatan sistem 6.65GB, pelbagai fungsi dioptimumkan
Apr 21, 2024 pm 06:40 PM
Wenjie M9 menolak peningkatan sistem 6.65GB, pelbagai fungsi dioptimumkan
Apr 21, 2024 pm 06:40 PM
Menurut berita pada 21 April 2021, baru-baru ini, model M9 komuniti Soal Jawab telah menolak kemas kini versi V4.2.1.4 kepada pengguna. Saiz pakej perisian yang dikemas kini mencapai 6.65GB Ia bukan sahaja menambah fungsi baru, tetapi juga mengoptimumkan beberapa fungsi sedia ada. Dilaporkan bahawa kemas kini ini membawa beberapa ciri baharu yang menarik perhatian kepada Q&A M9. Ini termasuk fungsi bahasa cahaya pemandangan lampu depan matriks interaktif pintar, yang memberikan pemandu pengalaman interaktif yang lebih kaya. Pada masa yang sama, fungsi paparan dwi 3D ADS yang baru ditambah membolehkan pemandu melihat paparan 3D ADS pada instrumen dan skrin kawalan pusat pada masa yang sama, meningkatkan keselesaan dan keselamatan pemanduan. Selain itu, ia turut menambah fungsi pembersihan kamera pandang belakang, serta bantuan pemanduan pintar seperti mengelak secara aktif halangan yang menceroboh lorong dan peringatan pemecut yang salah.
