
 Peranti teknologi
AI
Yang terbaru dari Universiti Oxford! Mickey: Padanan imej 2D dalam SOTA 3D! (CVPR\'24)
Peranti teknologi
AI
Yang terbaru dari Universiti Oxford! Mickey: Padanan imej 2D dalam SOTA 3D! (CVPR\'24)
Yang terbaru dari Universiti Oxford! Mickey: Padanan imej 2D dalam SOTA 3D! (CVPR\'24)

Ditulis di hadapan
Pautan projek: https://nianticlabs.github.io/mickey/
Memandangkan dua imej, pose kamera di antara mereka boleh dianggarkan dengan mewujudkan kesesuaian antara imej. Biasanya, surat-menyurat ini adalah 2D hingga 2D, dan anggaran pose kami adalah skala-tak tentu. Sesetengah aplikasi, seperti realiti tambahan segera pada bila-bila masa, di mana-mana sahaja, memerlukan anggaran pose metrik skala, jadi mereka bergantung pada penganggar kedalaman luaran untuk memulihkan skala.
Artikel ini mencadangkan MicKey, proses pemadanan titik utama yang boleh meramalkan korespondensi metrik dalam ruang kamera tiga dimensi. Dengan mempelajari padanan koordinat 3D merentas imej, kami dapat membuat kesimpulan pose relatif metrik tanpa ujian kedalaman. Tidak ada keperluan untuk ujian kedalaman, pembinaan semula pemandangan atau maklumat pertindihan imej semasa latihan. MicKey hanya diawasi oleh pasangan imej dan pose relatif mereka. MicKey mencapai prestasi tercanggih pada penanda aras penyetempatan semula tanpa peta sambil memerlukan kurang pengawasan berbanding kaedah bersaing yang lain.
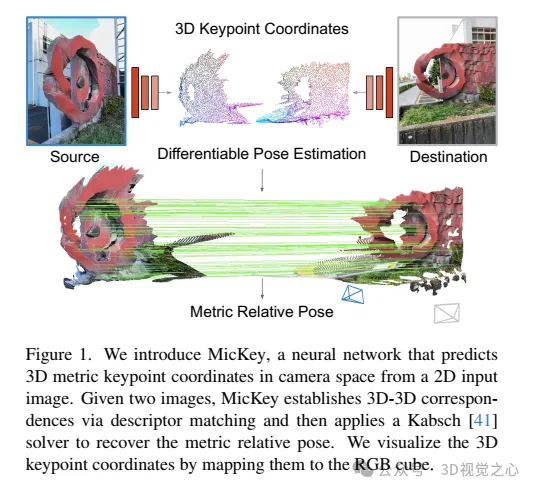
"Metric+Keypoints (MicKey) ialah proses pengesanan ciri yang menyelesaikan dua masalah. Pertama, MicKey mengundurkan lokasi titik utama dalam ruang kamera, yang membolehkan mewujudkan korespondensi metrik melalui pemadanan deskriptor. Daripada metrik Dalam surat-menyurat, relatif metrik pose boleh dipulihkan, seperti yang ditunjukkan dalam Rajah 1. Kedua, dengan menggunakan pengoptimuman pose yang boleh dibezakan untuk latihan hujung ke hujung, MicKey hanya memerlukan pasangan imej dan pose relatif sebenar mereka tanpa pengawasan semasa proses latihan MicKey mempelajari yang betul kedalaman titik utama secara tersirat dan hanya untuk kawasan ciri yang ditemui dengan tepat Proses latihan kami adalah mantap kepada pasangan imej dengan pertindihan visual yang tidak diketahui, jadi maklumat yang diperolehi oleh SFM (seperti pertindihan imej) tidak diperlukan menarik kerana melatihnya pada domain baharu tidak memerlukan sebarang maklumat tambahan kecuali berpose ”
Dalam penanda aras penempatan semula tanpa peta Dalam ujian, MicKey muncul di tempat teratas, mengatasi kaedah terkini. MicKey menyediakan anggaran pose skala-metrik yang boleh dipercayai walaupun di bawah perubahan sudut tontonan yang melampau disokong oleh ramalan kedalaman yang disasarkan khusus pada padanan ciri yang jarang. Padanan ubah bentuk di bawah perubahan sudut tontonan yang melampau disokong oleh ketepatan ini menjadikan MicKey sesuai untuk menyokong anggaran kedalaman yang diperlukan untuk padanan anggaran kedalaman disokong oleh ramalan kedalaman khusus untuk padanan ciri yang jarang.
Sumbangan utama adalah seperti berikut:
MicKey ialah rangkaian saraf yang boleh meramalkan perkara utama daripada satu imej dan menerangkannya. Deskriptor sedemikian boleh membenarkan anggaran pose relatif metrik antara imej.
Strategi latihan ini hanya memerlukan pemantauan pose relatif, tiada pengukuran kedalaman dan tiada pengetahuan tentang pertindihan pasangan imej.
Pengenalan kepada MicKey
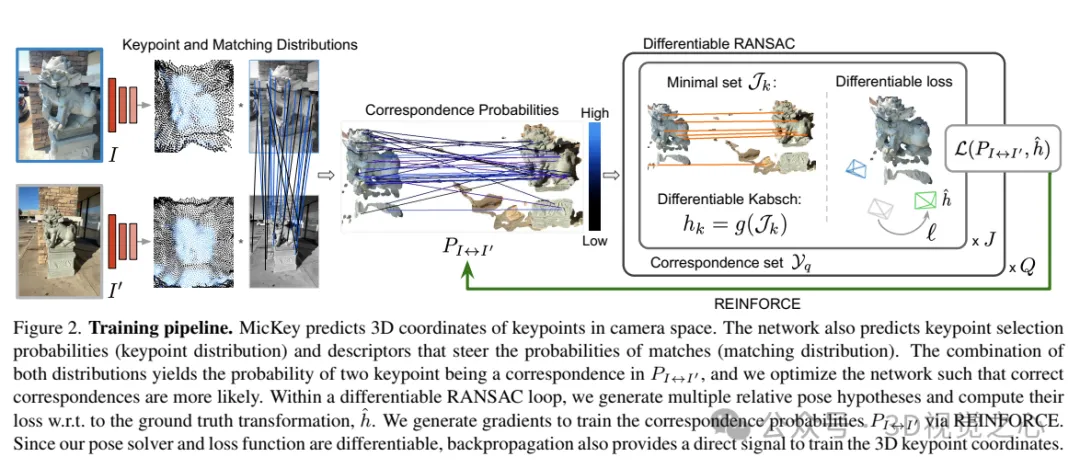
MicKey meramalkan koordinat tiga dimensi titik penting dalam ruang kamera. Rangkaian juga meramalkan kebarangkalian pemilihan titik utama (taburan titik kunci) dan deskriptor yang membimbing kebarangkalian padanan (taburan padanan). Menggabungkan kedua-dua pengedaran ini, kami mendapat kebarangkalian bahawa dua titik utama menjadi titik sepadan, dan mengoptimumkan rangkaian untuk menjadikan titik sepadan lebih berkemungkinan muncul. Dalam gelung RANSAC yang boleh dibezakan, berbilang hipotesis pose relatif dijana dan kerugiannya berbanding dengan transformasi sebenar dikira. Hasilkan kecerunan melalui REINFORCE untuk melatih kebarangkalian yang sepadan. Memandangkan fungsi penyelesai pose dan kehilangan kami boleh dibezakan, perambatan belakang juga menyediakan isyarat langsung untuk melatih koordinat titik kekunci 3D.
1) Pembelajaran pose-supervised metrik
Diberi dua imej, hitung pose relatif metrik mereka, serta skor titik utama, kebarangkalian padanan dan pose keyakinan (dalam bentuk kiraan inlier lembut). Matlamat kami adalah untuk melatih semua modul anggaran pose relatif secara hujung ke hujung. Semasa proses latihan, kami menganggap bahawa data latihan adalah, di manakah transformasi sebenar dan K/K' ialah parameter intrinsik kamera. Gambarajah skematik keseluruhan sistem ditunjukkan dalam Rajah 2.
Untuk mempelajari koordinat, keyakinan dan deskriptor perkara utama 3D, kami memerlukan sistem boleh dibezakan sepenuhnya. Walau bagaimanapun, oleh kerana beberapa elemen dalam saluran paip tidak boleh dibezakan, seperti pensampelan titik utama atau pengiraan lebih dalam, saluran paip anggaran pose relatif ditakrifkan semula sebagai kebarangkalian. Ini bermakna kita menganggap output rangkaian sebagai kebarangkalian padanan yang berpotensi, dan semasa latihan rangkaian mengoptimumkan outputnya untuk menjana kebarangkalian supaya padanan yang betul lebih berkemungkinan untuk dipilih.
2) Struktur rangkaian
MicKey mengikuti seni bina rangkaian berbilang kepala dengan pengekod dikongsi yang menyimpulkan titik kekunci metrik 3D serta deskriptor daripada imej input, seperti ditunjukkan dalam Rajah 3.
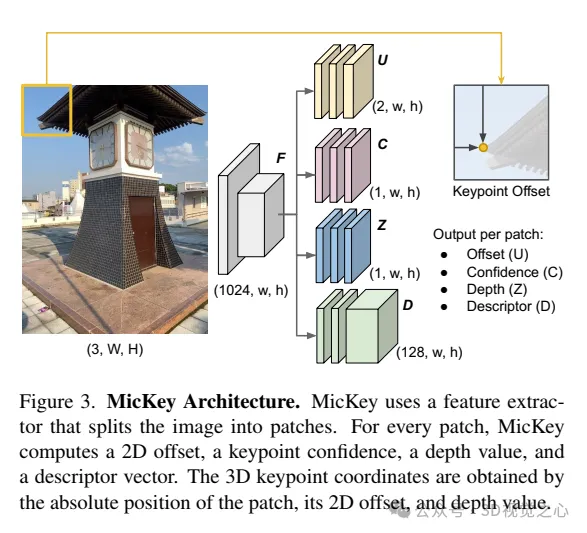
Pengekod. Gunakan model DINOv2 terlatih sebagai pengekstrak ciri dan gunakan cirinya secara langsung tanpa latihan lanjut atau penalaan halus. DINOv2 membahagikan imej input kepada blok bersaiz 14×14 dan menyediakan vektor ciri untuk setiap blok. Peta ciri akhir F mempunyai resolusi (1024, w, h), dengan w = W/14 dan h = H/14.
Perkara utama ialah Kepala. Empat kepala selari ditakrifkan di sini, yang memproses peta ciri F dan mengira peta xy offset (U), kedalaman (Z), keyakinan (C) dan deskriptor (D) di mana setiap entri peta sepadan dengan input A 14 ×14 blok dalam imej. MicKey mempunyai sifat yang jarang berlaku untuk meramalkan titik utama sebagai offset relatif daripada grid biasa yang jarang. Koordinat 2D mutlak diperolehi seperti berikut:

Perbandingan eksperimen
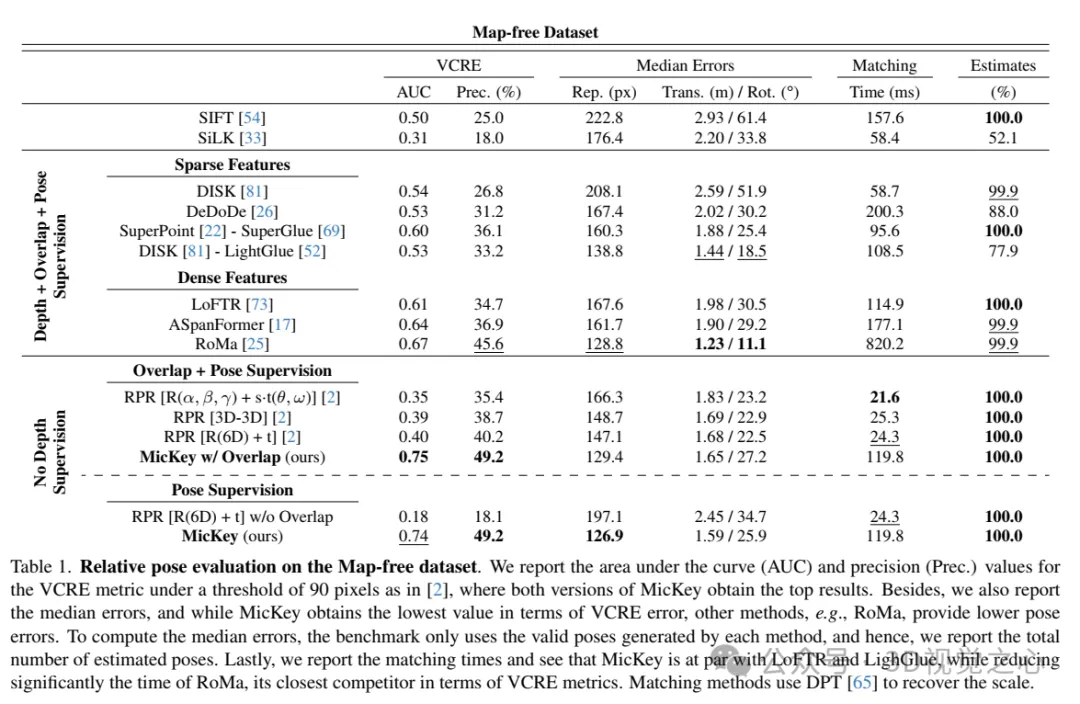
Penilaian pose relatif pada set data tanpa peta. Nilai kawasan di bawah lengkung (AUC) dan ketepatan (Prec.) untuk metrik VCRE pada ambang 90 piksel dilaporkan, dengan kedua-dua versi MicKey mencapai keputusan tertinggi. Selain itu, ralat median juga dilaporkan, dan sementara MicKey memperoleh nilai terendah dari segi ralat VCRE, kaedah lain, seperti RoMa, memberikan ralat pose yang lebih rendah. Untuk mengira ralat median, garis dasar hanya menggunakan pose sah yang dijana oleh setiap kaedah, oleh itu, kami melaporkan anggaran jumlah pose. Akhir sekali, masa padanan dilaporkan dan MicKey didapati setanding dengan LoFTR dan LighGlue, sambil mengurangkan dengan ketara masa RoMa, pesaing terdekat kepada MicKey dari segi metrik VCRE. Kaedah pemadanan menggunakan DPT untuk memulihkan skala.
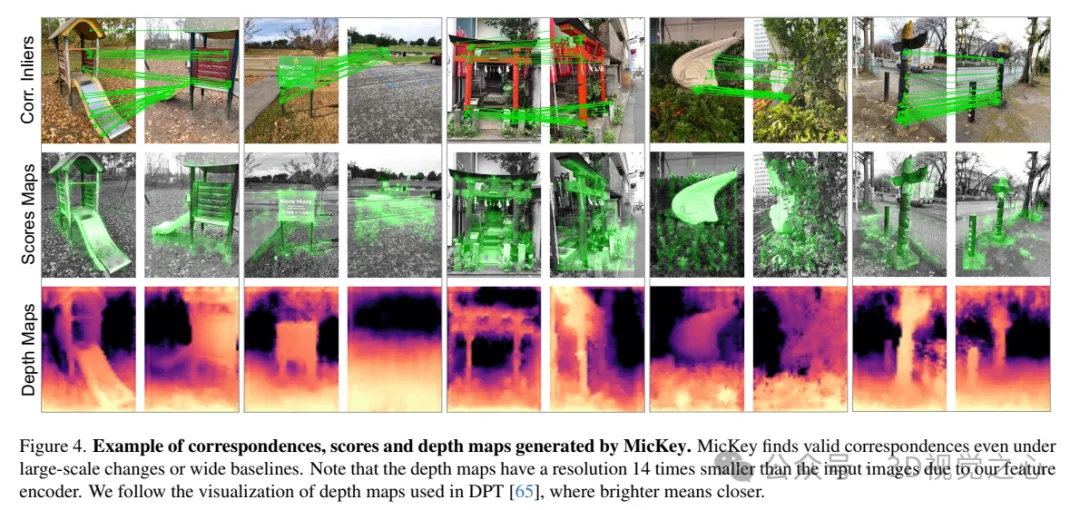
Contoh mata surat-menyurat, skor dan peta kedalaman yang dijana oleh MicKey. MicKey menemui titik surat-menyurat yang berkesan walaupun terdapat perubahan besar-besaran atau garis dasar yang luas. Ambil perhatian bahawa disebabkan pengekod ciri kami, resolusi peta kedalaman adalah 14 kali lebih kecil daripada imej input. Kami mengikuti kaedah visualisasi peta kedalaman yang digunakan dalam DPT, dengan warna yang lebih cerah mewakili jarak yang lebih dekat.
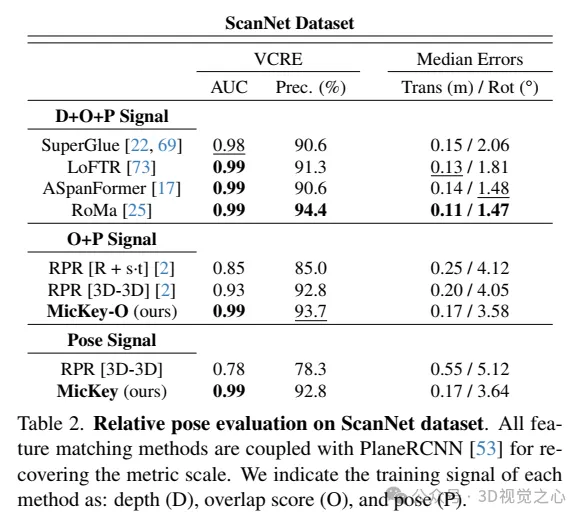
Penilaian pose relatif pada set data ScanNet. Semua kaedah pemadanan ciri digunakan bersama PlaneRCNN untuk memulihkan skala metrik. Kami menunjukkan isyarat latihan untuk setiap kaedah: kedalaman (D), skor pertindihan (O), dan pose (P).
Atas ialah kandungan terperinci Yang terbaru dari Universiti Oxford! Mickey: Padanan imej 2D dalam SOTA 3D! (CVPR\'24). Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

AI Hentai Generator
Menjana ai hentai secara percuma.

Artikel Panas
Alat panas

Notepad++7.3.1
Editor kod yang mudah digunakan dan percuma

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

Hantar Studio 13.0.1
Persekitaran pembangunan bersepadu PHP yang berkuasa

Dreamweaver CS6
Alat pembangunan web visual

SublimeText3 versi Mac
Perisian penyuntingan kod peringkat Tuhan (SublimeText3)
Topik panas
 1376
1376
 52
52

 Perpustakaan apa yang digunakan untuk operasi nombor terapung di GO?
Apr 02, 2025 pm 02:06 PM
Perpustakaan apa yang digunakan untuk operasi nombor terapung di GO?
Apr 02, 2025 pm 02:06 PM
Perpustakaan yang digunakan untuk operasi nombor terapung dalam bahasa Go memperkenalkan cara memastikan ketepatannya ...
 GITEE PAGES PENYEDIAAN LAMAN WEB STATIC Gagal: Bagaimana menyelesaikan masalah dan menyelesaikan kesilapan fail tunggal 404?
Apr 04, 2025 pm 11:54 PM
GITEE PAGES PENYEDIAAN LAMAN WEB STATIC Gagal: Bagaimana menyelesaikan masalah dan menyelesaikan kesilapan fail tunggal 404?
Apr 04, 2025 pm 11:54 PM
Giteepages Statik Laman Web Penggunaan Gagal: 404 Penyelesaian Masalah dan Resolusi Ralat Semasa Menggunakan Gitee ...
 Cara Menjalankan Projek H5
Apr 06, 2025 pm 12:21 PM
Cara Menjalankan Projek H5
Apr 06, 2025 pm 12:21 PM
Menjalankan projek H5 memerlukan langkah -langkah berikut: memasang alat yang diperlukan seperti pelayan web, node.js, alat pembangunan, dan lain -lain. Membina persekitaran pembangunan, membuat folder projek, memulakan projek, dan menulis kod. Mulakan pelayan pembangunan dan jalankan arahan menggunakan baris arahan. Pratonton projek dalam penyemak imbas anda dan masukkan URL Server Pembangunan. Menerbitkan projek, mengoptimumkan kod, menggunakan projek, dan menyediakan konfigurasi pelayan web.
 Perpustakaan mana yang dibangunkan oleh syarikat besar atau disediakan oleh projek sumber terbuka yang terkenal?
Apr 02, 2025 pm 04:12 PM
Perpustakaan mana yang dibangunkan oleh syarikat besar atau disediakan oleh projek sumber terbuka yang terkenal?
Apr 02, 2025 pm 04:12 PM
Perpustakaan mana yang dibangunkan oleh syarikat besar atau projek sumber terbuka yang terkenal? Semasa pengaturcaraan di GO, pemaju sering menghadapi beberapa keperluan biasa, ...
 Bagaimana cara menentukan pangkalan data yang berkaitan dengan model dalam beego orm?
Apr 02, 2025 pm 03:54 PM
Bagaimana cara menentukan pangkalan data yang berkaitan dengan model dalam beego orm?
Apr 02, 2025 pm 03:54 PM
Di bawah rangka kerja beegoorm, bagaimana untuk menentukan pangkalan data yang berkaitan dengan model? Banyak projek beego memerlukan pelbagai pangkalan data untuk dikendalikan secara serentak. Semasa menggunakan beego ...
 Adakah pengeluaran halaman H5 memerlukan penyelenggaraan berterusan?
Apr 05, 2025 pm 11:27 PM
Adakah pengeluaran halaman H5 memerlukan penyelenggaraan berterusan?
Apr 05, 2025 pm 11:27 PM
Halaman H5 perlu dikekalkan secara berterusan, kerana faktor -faktor seperti kelemahan kod, keserasian pelayar, pengoptimuman prestasi, kemas kini keselamatan dan peningkatan pengalaman pengguna. Kaedah penyelenggaraan yang berkesan termasuk mewujudkan sistem ujian lengkap, menggunakan alat kawalan versi, kerap memantau prestasi halaman, mengumpul maklum balas pengguna dan merumuskan pelan penyelenggaraan.
 Bagaimana menyelesaikan masalah penukaran jenis user_id semasa menggunakan aliran redis untuk melaksanakan beratur mesej dalam bahasa Go?
Apr 02, 2025 pm 04:54 PM
Bagaimana menyelesaikan masalah penukaran jenis user_id semasa menggunakan aliran redis untuk melaksanakan beratur mesej dalam bahasa Go?
Apr 02, 2025 pm 04:54 PM
Masalah menggunakan redisstream untuk melaksanakan beratur mesej dalam bahasa Go menggunakan bahasa Go dan redis ...
 Typecho Route Conflict Conflict: Kenapa saya/TEST/TAG/HIS/10086 Pencocokan TestTagIndex dan bukannya TestTagPage?
Apr 01, 2025 am 09:03 AM
Typecho Route Conflict Conflict: Kenapa saya/TEST/TAG/HIS/10086 Pencocokan TestTagIndex dan bukannya TestTagPage?
Apr 01, 2025 am 09:03 AM
TypeCho Routing Pencocokan Peraturan Analisis dan Penyiasatan Masalah Artikel ini akan menganalisis dan menjawab soalan mengenai hasil yang tidak konsisten dari pendaftaran routing plug-in typecho dan hasil padanan sebenar ...
