
 Peranti teknologi
AI
Gaussian-LIC: Sistem gabungan 3DGS-SLAM berbilang sensor pertama (Universiti Zhejiang & TUM)
Peranti teknologi
AI
Gaussian-LIC: Sistem gabungan 3DGS-SLAM berbilang sensor pertama (Universiti Zhejiang & TUM)
Gaussian-LIC: Sistem gabungan 3DGS-SLAM berbilang sensor pertama (Universiti Zhejiang & TUM)

Gabungan berbilang penderia dan 3DGS
Ungkapan tersirat "keupayaan masa nyata yang diperlukan untuk tugas SLAM intensif secara pengiraan berdasarkan pensampelan dalam ruang 3D" memerlukan kaedah+SLAM berasaskan NeRF. 3DGS menonjol kerana kelajuan pemaparan yang pantas dan kualiti visual yang unggul. Sebagai representasi yang jelas dan boleh ditafsir, 3DGS menjadikan pengeditan adegan menjadi mudah dan memudahkan pelaksanaan pelbagai tugas hiliran.
Sistem SLAM berasaskan medan sinaran sedia ada diuji terutamanya dalam persekitaran dalaman berskala kecil yang diterangi dengan baik dan memperoleh hasil yang memuaskan menggunakan input RGB-D atau RGB berjujukan. Kesukaran akan dihadapi apabila kaedah ini diperluaskan kepada pemandangan luar yang tidak terkawal berskala besar yang mencabar, seperti keadaan pencahayaan yang mencabar, latar belakang yang bersepah dan pergerakan diri yang sangat dinamik.
Gunakan Gaussian-LIC+ untuk menggabungkan data daripada berbilang penderia, termasuk lidar 3D, IMU dan kamera (dipanggil ALIC), dalam pemandangan luar yang tidak terkawal
- 3DGS pertama berdasarkan gabungan kamera inersia lidar -Sistem SLAM, mencapai penjejakan sikap yang sangat tepat dan pembinaan peta dalam talian yang realistik.
- Gunakan awan titik lidar berwarna secara berurutan seperti sebelum ini untuk membina semula peta Gaussian secara dalam talian. Gunakan siri strategi yang direka dengan teliti untuk mengembangkan peta Gaussian secara beransur-ansur dan mengawal ketumpatannya secara adaptif untuk mencapai kecekapan dan ketepatan yang tinggi.
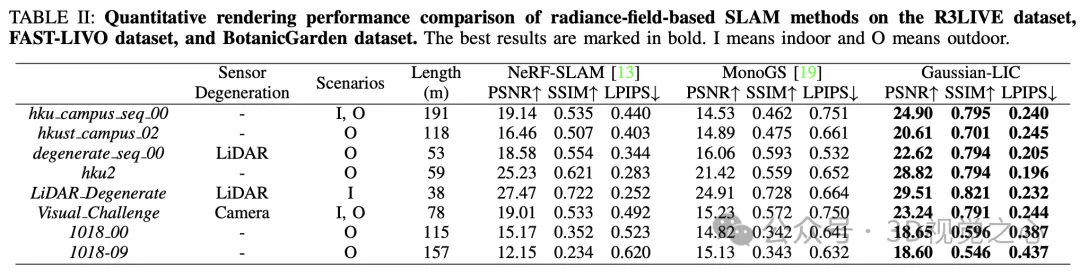
- Terbukti secara meluas dalam pemandangan dalaman dan luaran, menunjukkan prestasi terkini dalam penghasilan peta fotorealistik. Menunjukkan keteguhan dalam keadaan yang teruk, termasuk gerakan yang sangat dinamik, pencahayaan rendah dan kekurangan geometri dan tekstur visual.
Kaedah khusus
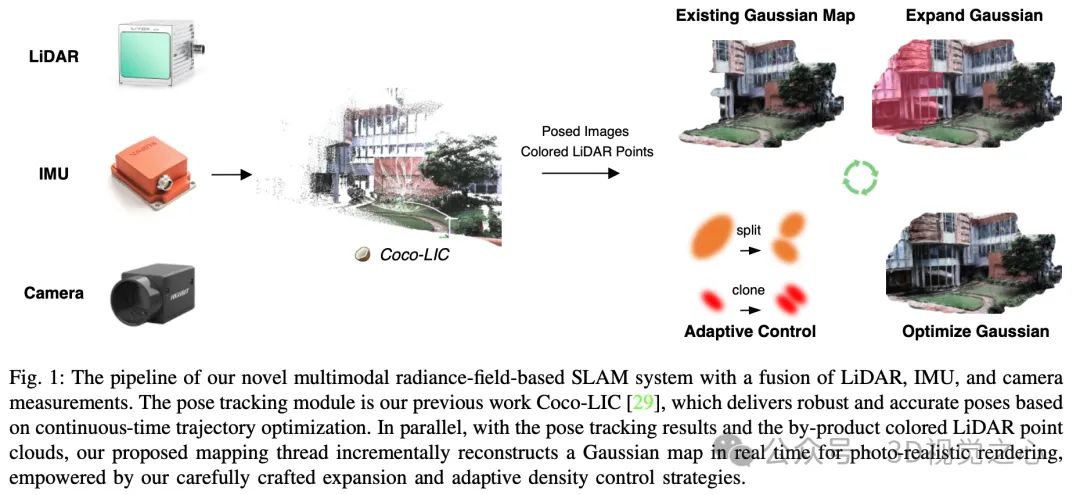
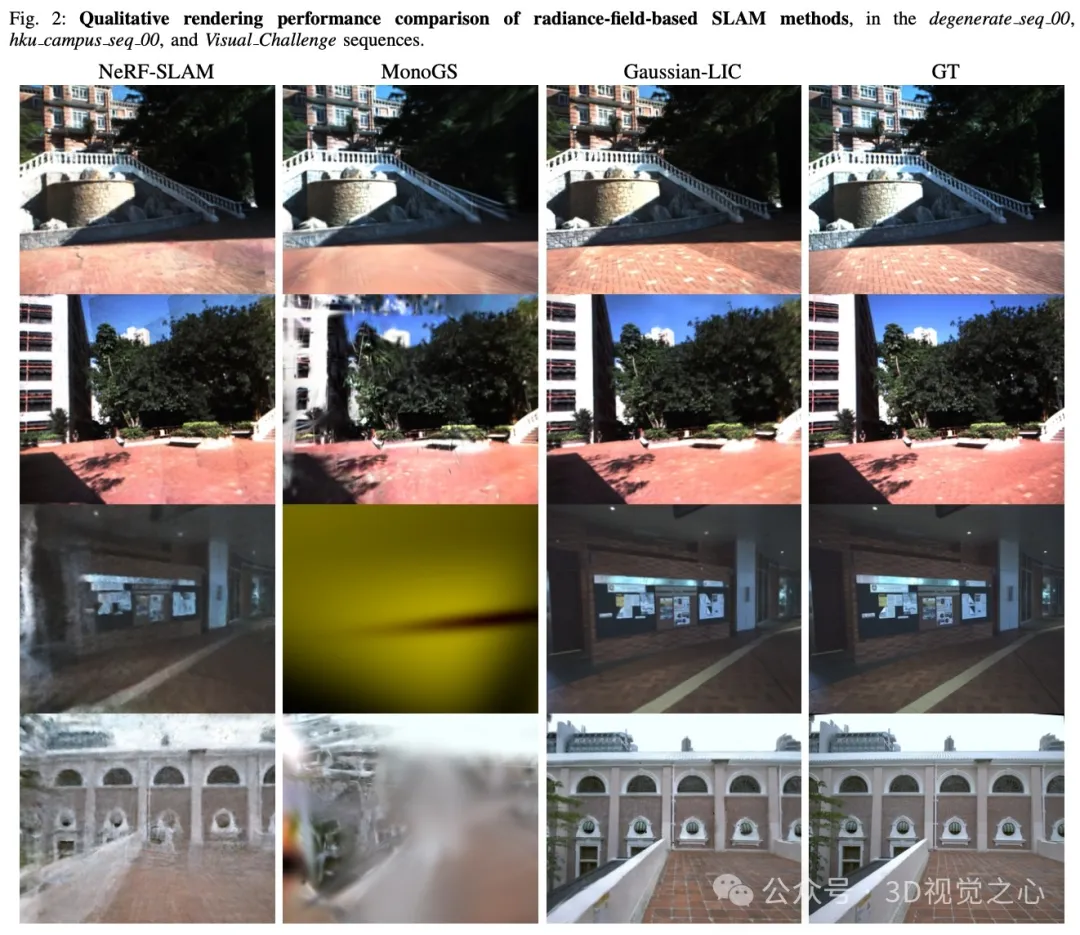
Seperti yang ditunjukkan dalam Rajah 1 ialah proses sistem LIC-SLAM. .
Gaussian 2D yang diperolehi oleh unjuran mempengaruhi piksel melalui persamaan pemberat kelegapan:
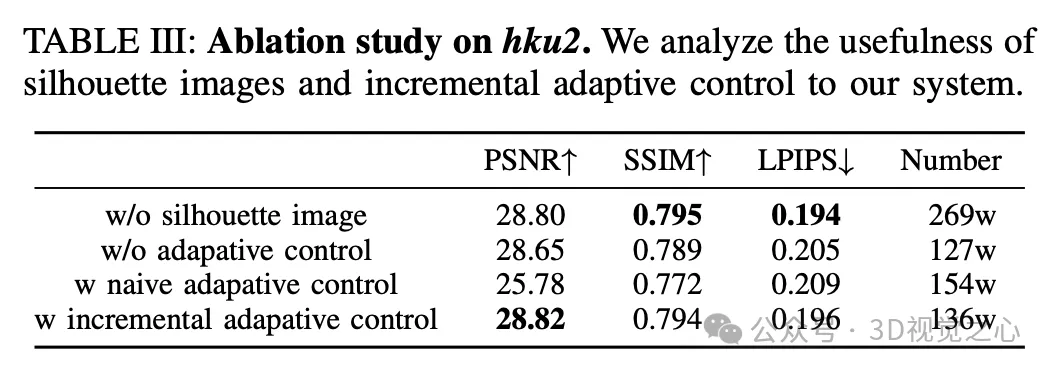
Memaparkan imej kontur untuk menentukan sama ada piksel mengandungi maklumat yang mencukupi daripada peta Gaussian:

 Faktor IMU
Faktor IMU
Faktor bias
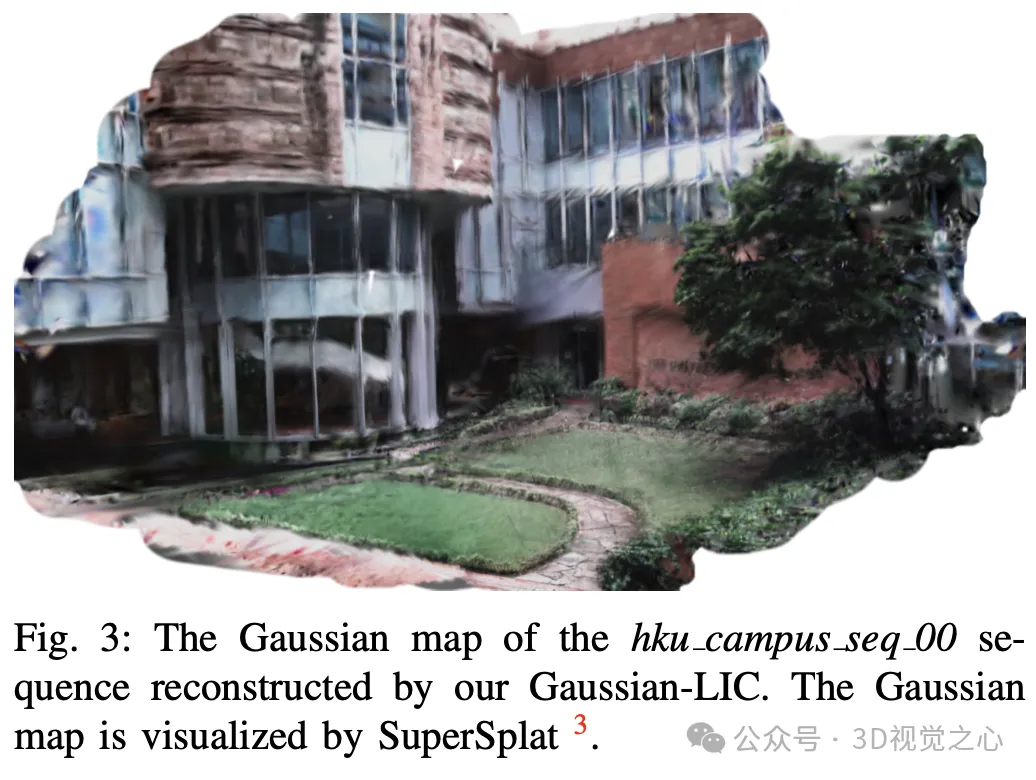
Kami hanya menggunakan imej terkini untuk pengoptimuman semasa selang masa. Gaussian-LIC mengekalkan peta lidar global yang disimpan dalam voxel pada resolusi 0.1 meter. Selepas mengoptimumkan trajektori dalam selang masa semasa, untuk meningkatkan kecekapan, hanya satu perempat daripada titik lidar dalam tempoh masa itu ditukar kepada koordinat dunia dan dilampirkan pada voxel untuk memastikan bahawa bilangan titik lidar dalam setiap voxel ialah Jarak antara mereka hendaklah lebih besar daripada 0.05 meter untuk mengurangkan lebihan. Untuk titik lidar yang berjaya dilampirkan, tonjolkannya pada imej terkini dan warnakannya dengan menanyakan nilai piksel. Selepas itu, mereka dihantar ke utas pemetaan bersama-sama dengan imej terkini anggaran pose kamera, yang dianggap sebagai bingkai.- Pemetaan realistik berdasarkan 3DGS
- Dengan input berterusan: anggaran pose kamera, imej bebas herotan, titik lidar berwarna, modul pemetaan membina dan mengoptimumkan peta Gaussian secara beransur-ansur, terutamanya dalam 4 langkah:
- Permulaan
- taburan Gaussian baharu menggunakan semua mata lidar yang diterima semasa selang masa pertama. Untuk mengurangkan artifak aliasing, kami menetapkan skala yang lebih kecil kepada Gaussian lebih dekat dengan satah imej dan skala yang lebih besar kepada Gaussians yang lebih jauh dari satah imej:
- Sambungan: Biasanya, setiap bingkai yang diterima menangkap geometri dan rupa kawasan tontonan baharu. Untuk mengelakkan pertindihan atau lebihan maklumat yang sangat serupa, mula-mula tunjukkan imej kontur daripada paparan imej semasa mengikut persamaan (6), dan jana topeng untuk memilih piksel yang tidak boleh dipercayai dalam peta Gaussian semasa, dan Cenderung untuk memerhati kawasan baharu, hanya titik lidar yang boleh ditayangkan pada piksel yang dipilih dieksploitasi:

- Pengoptimuman: Gunakan semua imej yang diterima untuk pengoptimuman bagi sistem pemetaan tambahan dalam talian kami Ini tidak boleh dilaksanakan secara pengiraan, jadi setiap bingkai imej kelima dianggap kerangka utama. Untuk memastikan kerumitan pengiraan terhad untuk kecekapan, kami memilih bingkai utama aktif untuk mengoptimumkan peta Gaussian, termasuk bingkai utama pertama dan terakhir, dan bingkai kunci lain yang dipilih secara rawak untuk mengelakkan bencana menyelesaikan masalah melupakan seksual dan mengekalkan geometri. ketekalan peta global. Kami merombak bingkai kunci yang dipilih secara rawak dan mengulangi setiap bingkai kunci satu demi satu, mengoptimumkan peta dengan meminimumkan kehilangan pemaparan semula:

- Kawalan Adaptif: Pengimbasan LiDAR mungkin tidak meliputi keseluruhan pemandangan , terutamanya dalam tanpa sempadan persekitaran luar. Oleh itu, adalah perlu untuk melaksanakan kawalan penyesuaian untuk memadatkan peta Gaussian dalam jumlah unit. Strategi asal mengendalikan Gaussians dengan kecerunan yang besar pada selang masa tetap, manakala dalam mod tambahan, memandangkan mereka selalunya belum menumpu lagi, Gaussian yang baru ditambah mungkin tersalah klon atau terbelah kerana mempunyai kecerunan yang besar. Penyelesaiannya adalah untuk mengklasifikasikan taburan Gaussian sedia ada ke dalam kategori stabil dan tidak stabil, dan hanya padatkan taburan Gaussian yang stabil.
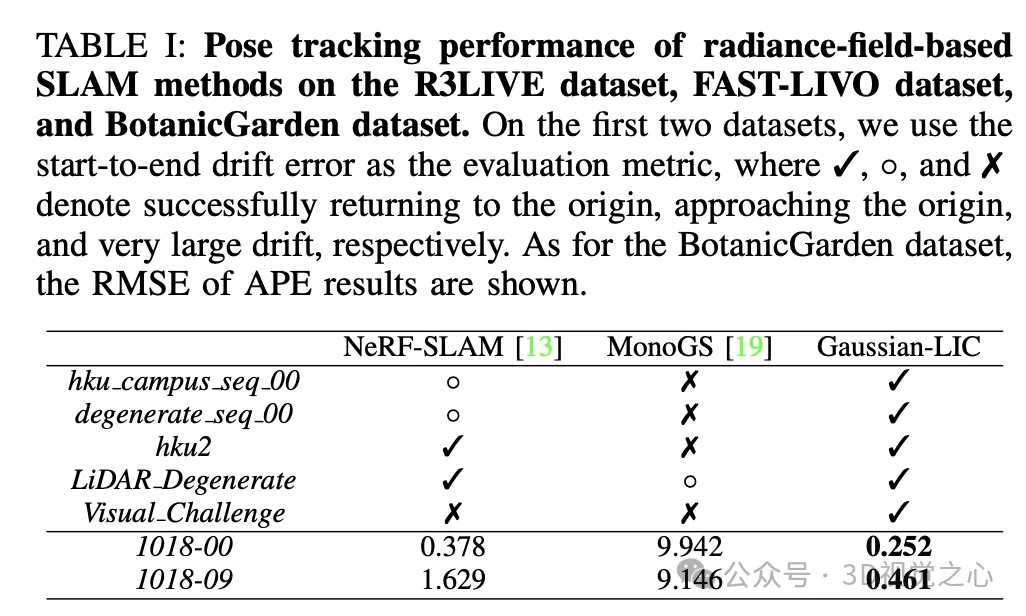
Experiment
summary dan perbincangan
Gaussian-lic adalah novel lidar -inertial-kamera medan slam medan, dilaksanakan pengesanan yang sangat tepat , dwi fungsi dengan pembinaan semula dalam talian fotorealistik dengan percikan Gaussian 3D. Titik LiDAR berlorek dalam koordinat dunia yang dihasilkan oleh odometri kamera LiDAR-inersia yang cekap digunakan sebagai pendahuluan yang baik untuk membantu pembinaan tambahan peta Gaussian dengan generalisasi yang jauh lebih baik dalam pemandangan dalam dan luar .
Ruang untuk penambahbaikan:
- Cuba alih keluar taburan Gaussian yang tidak perlu dalam peta.
- Menyokong pelbagai lidar, pada masa ini hanya cuba menggunakan lidar keadaan pepejal.
- Pendedahan automatik kamera dan kabur gerakan mempengaruhi kualiti visual peta realistik.
Atas ialah kandungan terperinci Gaussian-LIC: Sistem gabungan 3DGS-SLAM berbilang sensor pertama (Universiti Zhejiang & TUM). Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

AI Hentai Generator
Menjana ai hentai secara percuma.

Artikel Panas
Alat panas

Notepad++7.3.1
Editor kod yang mudah digunakan dan percuma

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

Hantar Studio 13.0.1
Persekitaran pembangunan bersepadu PHP yang berkuasa

Dreamweaver CS6
Alat pembangunan web visual

SublimeText3 versi Mac
Perisian penyuntingan kod peringkat Tuhan (SublimeText3)
Topik panas
 1378
1378
 52
52

 Wah hebat! Pengalaman Samsung Galaxy Ring: 2999 yuan cincin pintar sebenar
Jul 19, 2024 pm 02:31 PM
Wah hebat! Pengalaman Samsung Galaxy Ring: 2999 yuan cincin pintar sebenar
Jul 19, 2024 pm 02:31 PM
Samsung secara rasmi mengeluarkan versi kebangsaan Samsung Galaxy Ring pada 17 Julai, berharga 2,999 yuan. Telefon sebenar Galaxy Ring adalah versi 2024 "WowAwesome, ini adalah detik eksklusif saya". Ia adalah produk elektronik yang membuatkan kita berasa paling segar dalam beberapa tahun kebelakangan ini (walaupun bunyinya seperti bendera) dalam beberapa tahun kebelakangan ini. (Dalam gambar, cincin di kiri dan kanan ialah Galaxy Ring↑) Spesifikasi Samsung Galaxy Ring (data dari laman web rasmi Bank of China): Sistem ZephyrRTOS, storan 8MB kalis air + kapasiti bateri IP68; mAh (saiz yang berbeza
 Tingkatkan ke skrin penuh! iPhone SE4 maju ke bulan September
Jul 24, 2024 pm 12:56 PM
Tingkatkan ke skrin penuh! iPhone SE4 maju ke bulan September
Jul 24, 2024 pm 12:56 PM
Baru-baru ini, berita baru mengenai iPhone SE4 telah didedahkan di Weibo Dikatakan bahawa proses penutup belakang iPhone SE4 adalah sama seperti versi standard iPhone 16 Dengan kata lain, iPhone SE4 akan menggunakan panel belakang kaca dan a skrin lurus dan reka bentuk tepi lurus. Dilaporkan bahawa iPhone SE4 akan dikeluarkan lebih awal hingga September tahun ini, bermakna ia berkemungkinan akan dilancarkan pada masa yang sama dengan iPhone 16. 1. Menurut paparan yang terdedah, reka bentuk hadapan iPhone SE4 adalah serupa dengan iPhone 13, dengan kamera hadapan dan sensor FaceID pada skrin takuk. Bahagian belakang menggunakan reka letak yang serupa dengan iPhoneXr, tetapi ia hanya mempunyai satu kamera dan tidak mempunyai modul kamera keseluruhan.
 Seberapa besar penderia 1 inci pada telefon mudah alih Ia sebenarnya lebih besar daripada penderia 1 inci pada kamera
May 08, 2024 pm 06:40 PM
Seberapa besar penderia 1 inci pada telefon mudah alih Ia sebenarnya lebih besar daripada penderia 1 inci pada kamera
May 08, 2024 pm 06:40 PM
Artikel semalam tidak menyebut "saiz sensor". Disebabkan beberapa isu sejarah*, sama ada kamera atau telefon bimbit, "1 inci" dalam panjang pepenjuru penderia bukanlah 25.4mm. *Apabila bercakap tentang tiub vakum, tidak ada pengembangan di sini. Ia sedikit seperti punggung kuda yang menentukan lebar landasan kereta api. Untuk mengelakkan salah faham, penulisan yang lebih ketat ialah "Jenis 1.0" atau "Jenis1.0". Lebih-lebih lagi, apabila saiz sensor kurang daripada jenis 1/2, taip 1 = 18mm dan apabila saiz sensor lebih besar daripada atau sama dengan jenis 1/2, taip 1 =
 Bagaimanakah kamera dan lidar ditentukur? Gambaran keseluruhan semua alat penentukuran arus perdana dalam industri
Mar 22, 2024 pm 02:01 PM
Bagaimanakah kamera dan lidar ditentukur? Gambaran keseluruhan semua alat penentukuran arus perdana dalam industri
Mar 22, 2024 pm 02:01 PM
Penentukuran kamera dan lidar adalah kerja asas yang penting dalam banyak tugasan Ketepatan penentukuran secara langsung mempengaruhi had atas kesan gabungan penyelesaian berikutnya. Memandangkan banyak syarikat pemanduan dan robotik autonomi melaburkan banyak tenaga manusia dan sumber bahan untuk terus meningkatkan ketepatan penentukuran, hari ini kami akan memperkenalkan anda kepada beberapa kotak alat penentukuran Kamera-Lidar biasa, dan kami mengesyorkan anda mengumpulnya! 1.Libcbdetect mengesan berbilang papan dam dalam satu tangkapan: https://www.cvlibs.net/software/libcbdetect/Algoritma yang ditulis menggunakan MATLAB boleh mengekstrak titik sudut secara automatik dan menjadikannya tepat ke tahap sub-piksel dan menggabungkan titik sudut ini ke dalam corak papan dam segi empat tepat. Ia harus dikira
 AirPods Pro dan AirPods 3: Cara menukar kawalan sensor daya
Apr 13, 2023 am 11:43 AM
AirPods Pro dan AirPods 3: Cara menukar kawalan sensor daya
Apr 13, 2023 am 11:43 AM
AirPods Pro datang dengan ciri hebat seperti pembatalan hingar dan mod ketelusan dengan reka bentuk dalam telinga. Untuk bertukar antara ciri ini dan ciri lain, penderia daya dalam batang AirPods Pro (dan AirPods 3) menyediakan kawalan yang mudah. Teruskan membaca untuk mengetahui cara menukar kawalan AirPods, termasuk kelajuan tekan, tempoh tekan, perkara yang dilakukan oleh penderia daya kiri dan kanan, dan banyak lagi. AirPods gen 1 dan 2 menggunakan ketik dua kali pada fon telinga untuk kawalan. Tetapi AirPods Pro dan AirPods 3 menggunakan penderia tekanan terbina pada batang setiap fon telinga. Kami akan merangkumi tiga cara untuk menogol antara pengurangan hingar, ketelusan dan matikan, dan cara menyesuaikan penderia daya
 Siling sensor domestik! Penjelasan terperinci tentang sensor OV50K40
Mar 20, 2024 am 09:56 AM
Siling sensor domestik! Penjelasan terperinci tentang sensor OV50K40
Mar 20, 2024 am 09:56 AM
Pengilang domestik Howe telah mengeluarkan sensor CMOS-OV50K40 baharu. Penderia ini ialah penderia imej telefon pintar pertama di dunia menggunakan teknologi TheiaCel Reka bentuknya yang unik membolehkan satu pendedahan mencapai julat dinamik yang hampir dengan paras mata manusia. Penderia OV50K40 mempunyai resolusi asli 50 juta piksel dan menggunakan kawasan dasar besar 1/1.3 inci, dengan luas setiap piksel mencapai 1.2 mikron. Selain itu, ia juga menyokong output empat dalam satu piksel, yang bermaksud menggabungkan empat piksel menjadi satu untuk mengeluarkan imej 12.5 megapiksel, sekali gus membawakan fotosensitiviti yang lebih berkuasa. Kadar bingkai sensor menyokong 120 bingkai/saat dan 60 bingkai/saat (HDR) untuk B 50 megapiksel penuh
 Mengapakah sesetengah orang berpendapat fotografi Android boleh mengalahkan Apple? Jawapannya begitu langsung
Mar 25, 2024 am 09:50 AM
Mengapakah sesetengah orang berpendapat fotografi Android boleh mengalahkan Apple? Jawapannya begitu langsung
Mar 25, 2024 am 09:50 AM
Apabila membincangkan fungsi kamera telefon Android, kebanyakan pengguna memberikan maklum balas yang positif Berbanding dengan telefon Apple, pengguna umumnya percaya bahawa telefon Android mempunyai prestasi kamera yang lebih baik. Pandangan ini bukan tidak berasas, dan sebab-sebab praktikal adalah jelas. Telefon Android mewah mempunyai kelebihan daya saing yang lebih besar dari segi konfigurasi perkakasan, terutamanya penderia kamera. Banyak telefon Android canggih menggunakan penderia kamera terbaharu, yang paling tinggi, yang selalunya lebih cemerlang daripada iPhone yang dikeluarkan pada masa yang sama dari segi kiraan piksel, saiz apertur dan keupayaan zum optik. Kelebihan ini membolehkan telefon Android memberikan kesan pengimejan berkualiti tinggi apabila mengambil foto dan merakam video, memenuhi keperluan pengguna untuk fotografi dan videografi. Oleh itu, kelebihan daya saing konfigurasi perkakasan telah menjadi tarikan telefon Android.
 Nama kod penuh siri Xiaomi 15 didedahkan: Dada, Haotian, Xuanyuan
Aug 22, 2024 pm 06:47 PM
Nama kod penuh siri Xiaomi 15 didedahkan: Dada, Haotian, Xuanyuan
Aug 22, 2024 pm 06:47 PM
Siri Xiaomi Mi 15 dijangka akan dikeluarkan secara rasmi pada bulan Oktober, dan nama kod siri penuhnya telah didedahkan dalam pangkalan kod MiCode media asing. Antaranya, perdana Xiaomi Mi 15 Ultra diberi nama kod "Xuanyuan" (bermaksud "Xuanyuan"). Nama ini berasal daripada Maharaja Kuning dalam mitologi Cina, yang melambangkan bangsawan. Xiaomi 15 diberi nama kod "Dada", manakala Xiaomi 15Pro dinamakan "Haotian" (bermaksud "Haotian"). Nama kod dalaman Xiaomi Mi 15S Pro ialah "dijun", yang merujuk kepada Maharaja Jun, tuhan pencipta "The Classic of Mountains and Seas". Sarung siri Xiaomi 15Ultra
