
 Peranti teknologi
AI
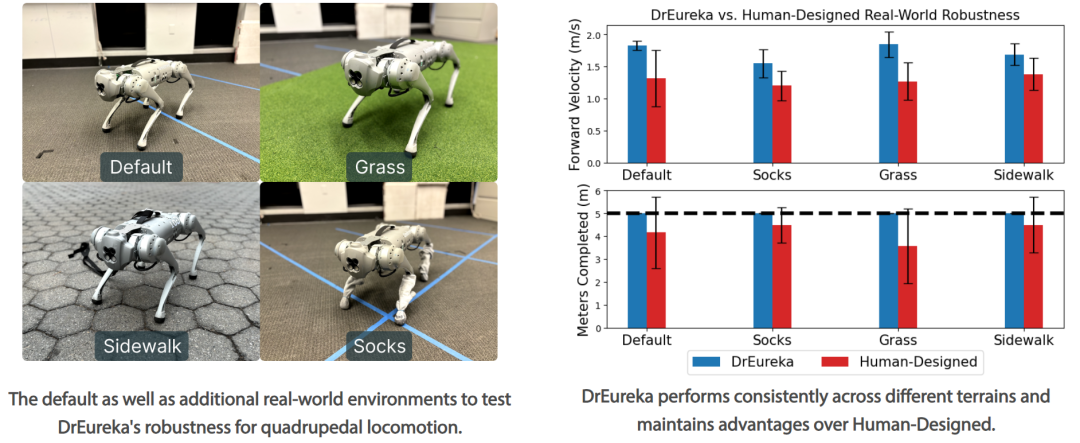
Berjalan 'anjing' di atas bola yoga! Eureka, dipilih sebagai salah satu daripada sepuluh projek teratas NVIDIA, telah membuat satu kejayaan baharu
Peranti teknologi
AI
Berjalan 'anjing' di atas bola yoga! Eureka, dipilih sebagai salah satu daripada sepuluh projek teratas NVIDIA, telah membuat satu kejayaan baharu
Berjalan 'anjing' di atas bola yoga! Eureka, dipilih sebagai salah satu daripada sepuluh projek teratas NVIDIA, telah membuat satu kejayaan baharu


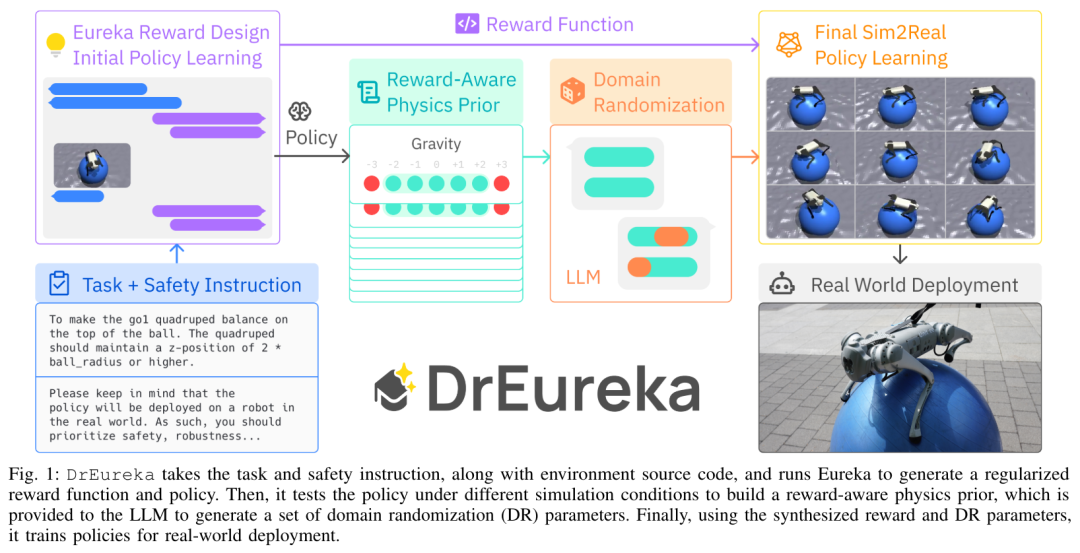
Alamat kertas: https://eureka-research.github.io/dr-eureka/assets/dreureka-paper.pdf Laman utama projek: https://github.com/eureka- research/DrEureka Tajuk kertas: DrEureka: Language Model Guided Sim-To-Real Transfer
Atas ialah kandungan terperinci Berjalan 'anjing' di atas bola yoga! Eureka, dipilih sebagai salah satu daripada sepuluh projek teratas NVIDIA, telah membuat satu kejayaan baharu. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

AI Hentai Generator
Menjana ai hentai secara percuma.

Artikel Panas
Alat panas

Notepad++7.3.1
Editor kod yang mudah digunakan dan percuma

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

Hantar Studio 13.0.1
Persekitaran pembangunan bersepadu PHP yang berkuasa

Dreamweaver CS6
Alat pembangunan web visual

SublimeText3 versi Mac
Perisian penyuntingan kod peringkat Tuhan (SublimeText3)
Topik panas
 1377
1377
 52
52

 Perpustakaan apa yang digunakan untuk operasi nombor terapung di GO?
Apr 02, 2025 pm 02:06 PM
Perpustakaan apa yang digunakan untuk operasi nombor terapung di GO?
Apr 02, 2025 pm 02:06 PM
Perpustakaan yang digunakan untuk operasi nombor terapung dalam bahasa Go memperkenalkan cara memastikan ketepatannya ...
 Cara Menjalankan Projek H5
Apr 06, 2025 pm 12:21 PM
Cara Menjalankan Projek H5
Apr 06, 2025 pm 12:21 PM
Menjalankan projek H5 memerlukan langkah -langkah berikut: memasang alat yang diperlukan seperti pelayan web, node.js, alat pembangunan, dan lain -lain. Membina persekitaran pembangunan, membuat folder projek, memulakan projek, dan menulis kod. Mulakan pelayan pembangunan dan jalankan arahan menggunakan baris arahan. Pratonton projek dalam penyemak imbas anda dan masukkan URL Server Pembangunan. Menerbitkan projek, mengoptimumkan kod, menggunakan projek, dan menyediakan konfigurasi pelayan web.
 GITEE PAGES PENYEDIAAN LAMAN WEB STATIC Gagal: Bagaimana menyelesaikan masalah dan menyelesaikan kesilapan fail tunggal 404?
Apr 04, 2025 pm 11:54 PM
GITEE PAGES PENYEDIAAN LAMAN WEB STATIC Gagal: Bagaimana menyelesaikan masalah dan menyelesaikan kesilapan fail tunggal 404?
Apr 04, 2025 pm 11:54 PM
Giteepages Statik Laman Web Penggunaan Gagal: 404 Penyelesaian Masalah dan Resolusi Ralat Semasa Menggunakan Gitee ...
 Perpustakaan mana yang dibangunkan oleh syarikat besar atau disediakan oleh projek sumber terbuka yang terkenal?
Apr 02, 2025 pm 04:12 PM
Perpustakaan mana yang dibangunkan oleh syarikat besar atau disediakan oleh projek sumber terbuka yang terkenal?
Apr 02, 2025 pm 04:12 PM
Perpustakaan mana yang dibangunkan oleh syarikat besar atau projek sumber terbuka yang terkenal? Semasa pengaturcaraan di GO, pemaju sering menghadapi beberapa keperluan biasa, ...
 Bagaimana cara menentukan pangkalan data yang berkaitan dengan model dalam beego orm?
Apr 02, 2025 pm 03:54 PM
Bagaimana cara menentukan pangkalan data yang berkaitan dengan model dalam beego orm?
Apr 02, 2025 pm 03:54 PM
Di bawah rangka kerja beegoorm, bagaimana untuk menentukan pangkalan data yang berkaitan dengan model? Banyak projek beego memerlukan pelbagai pangkalan data untuk dikendalikan secara serentak. Semasa menggunakan beego ...
 Adakah pengeluaran halaman H5 memerlukan penyelenggaraan berterusan?
Apr 05, 2025 pm 11:27 PM
Adakah pengeluaran halaman H5 memerlukan penyelenggaraan berterusan?
Apr 05, 2025 pm 11:27 PM
Halaman H5 perlu dikekalkan secara berterusan, kerana faktor -faktor seperti kelemahan kod, keserasian pelayar, pengoptimuman prestasi, kemas kini keselamatan dan peningkatan pengalaman pengguna. Kaedah penyelenggaraan yang berkesan termasuk mewujudkan sistem ujian lengkap, menggunakan alat kawalan versi, kerap memantau prestasi halaman, mengumpul maklum balas pengguna dan merumuskan pelan penyelenggaraan.
 Bagaimana menyelesaikan masalah penukaran jenis user_id semasa menggunakan aliran redis untuk melaksanakan beratur mesej dalam bahasa Go?
Apr 02, 2025 pm 04:54 PM
Bagaimana menyelesaikan masalah penukaran jenis user_id semasa menggunakan aliran redis untuk melaksanakan beratur mesej dalam bahasa Go?
Apr 02, 2025 pm 04:54 PM
Masalah menggunakan redisstream untuk melaksanakan beratur mesej dalam bahasa Go menggunakan bahasa Go dan redis ...
 Typecho Route Conflict Conflict: Kenapa saya/TEST/TAG/HIS/10086 Pencocokan TestTagIndex dan bukannya TestTagPage?
Apr 01, 2025 am 09:03 AM
Typecho Route Conflict Conflict: Kenapa saya/TEST/TAG/HIS/10086 Pencocokan TestTagIndex dan bukannya TestTagPage?
Apr 01, 2025 am 09:03 AM
TypeCho Routing Pencocokan Peraturan Analisis dan Penyiasatan Masalah Artikel ini akan menganalisis dan menjawab soalan mengenai hasil yang tidak konsisten dari pendaftaran routing plug-in typecho dan hasil padanan sebenar ...
