

北大推出全新機器人多模態大模型!面向通用和機器人場景的高效推理和操作


AIxiv專欄是本站發布學術、技術內容的欄位。過去數年,本站AIxiv專欄接收通報了2,000多篇內容,涵蓋全球各大專院校與企業的頂尖實驗室,有效促進了學術交流與傳播。如果您有優秀的工作想要分享,歡迎投稿或聯絡報道。投稿信箱:liyazhou@jiqizhixin.com;zhaoyunfeng@jiqizhixin.com
為了賦予機器人端到端的推理和操縱能力,本文創新性地將視覺編碼器與高效的狀態空間語言模型集成,構建了全新的RoboMamba 多模態大模型,使其具備視覺常識任務和機器人相關任務的推理能力,並且都取得了先進的性能表現。同時,本文發現當 RoboMamba 具備強大的推理能力後,我們可以透過極低的訓練成本讓 RoboMamba 掌握多種操縱位姿預測能力。
論文:RoboMamba: Multimodal State Space Model for Efficient Robot Reasoning and Manipulation
論文連結:https://arxiv.org/ab2400672302032302302302302302302302302302302302302030230230230302302303030字sites.google.com/view/robomamba-web
Github:https://github.com/lmzpai/roboMamba
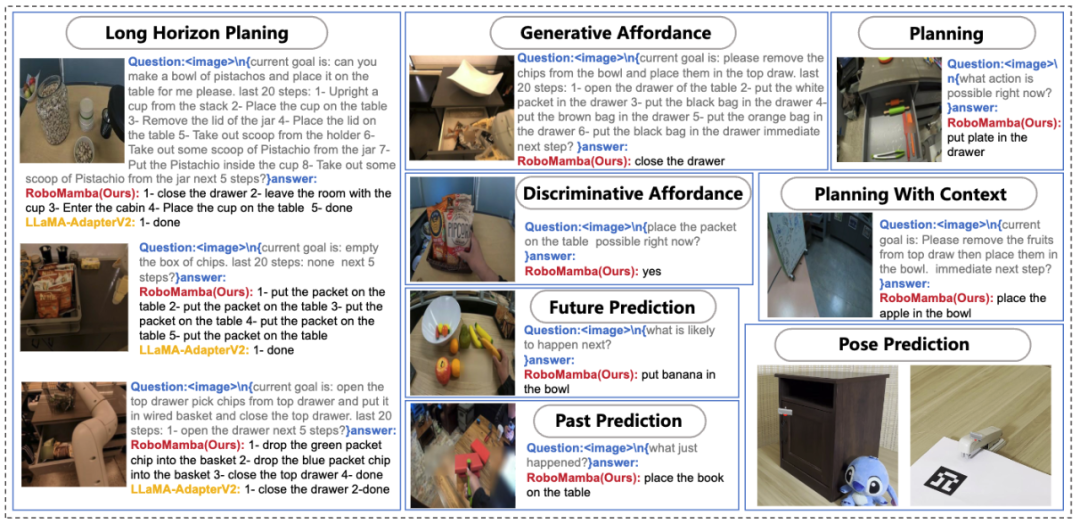
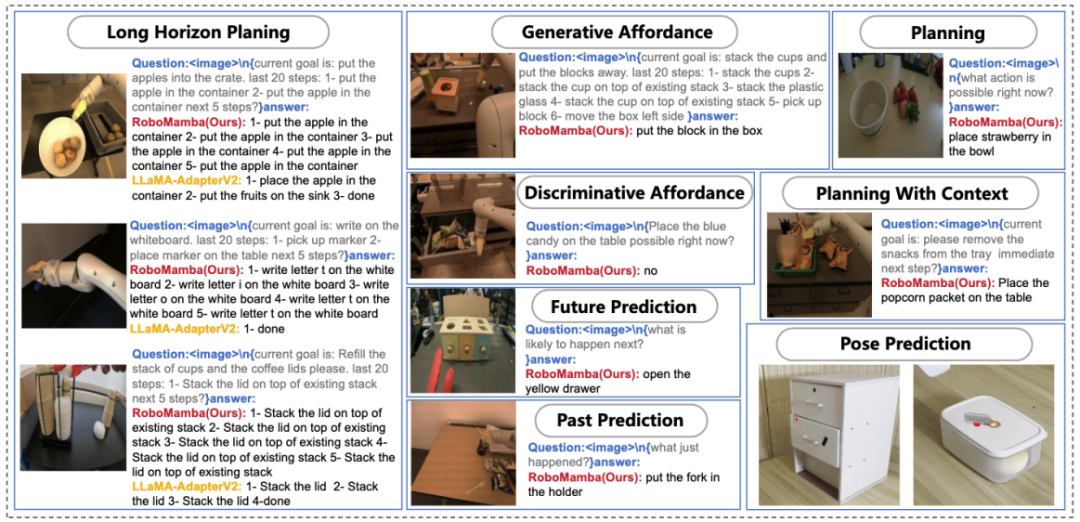 圖1.5規劃、提示性任務規劃、長程任務規劃、可操縱性判斷、可操縱性產生、未來與過去預測、末端執行器位姿預測等。
圖1.5規劃、提示性任務規劃、長程任務規劃、可操縱性判斷、可操縱性產生、未來與過去預測、末端執行器位姿預測等。
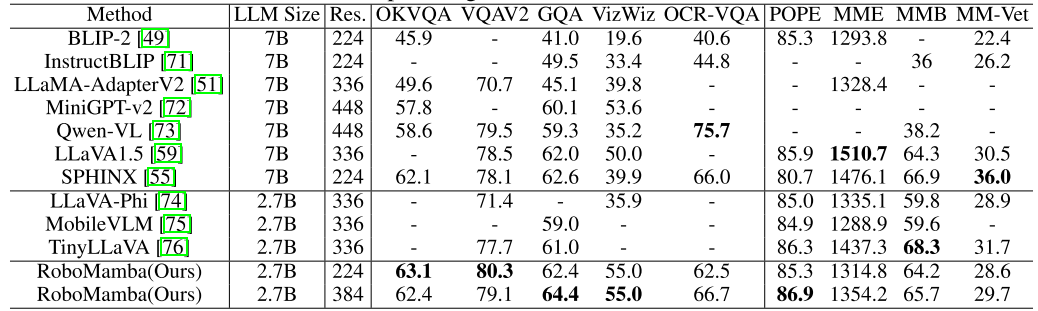
我們創新地將視覺編碼器與高效的Mamba 語言模型集成,構建了全新的機器人端模式,其具備視覺常識和機器人相關的全面推理能力。 為了讓 RoboMamba 具備末端執行器操縱位姿預測能力,我們探討了一種使用簡單 Policy Head 的高效微調策略。我們發現,一旦 RoboMamba 達到足夠的推理能力,它可以以極低的成本掌握操縱位姿預測技能。 在我們的大量實驗中,RoboMamba 在通用和機器人推理評估基準上表現出色,並在模擬器和真實世界實驗中展示了令人印象深刻的位姿預測結果。
。推理答案通常包含單獨的子任務
 對於一個問題
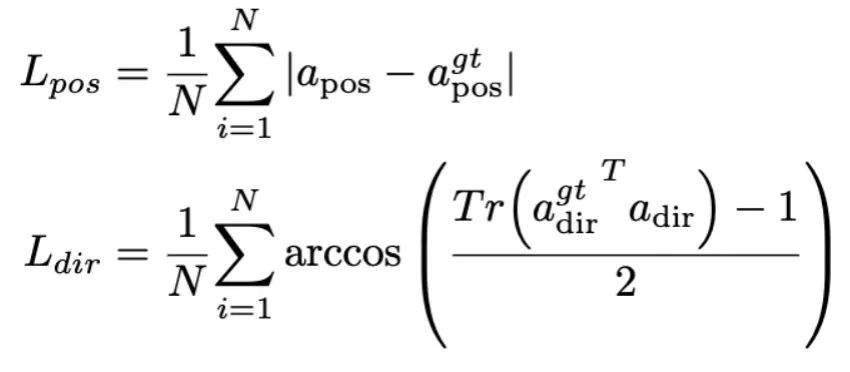
對於一個問題 。例如,當面對一個計劃問題,如 “如何收拾桌子?”,反應通常包括 “第一步:撿起物體” 和 “第二步:把物體放入盒子” 等步驟。對於動作預測,我們利用一個高效簡單的策略頭 π 來預測動作
。例如,當面對一個計劃問題,如 “如何收拾桌子?”,反應通常包括 “第一步:撿起物體” 和 “第二步:把物體放入盒子” 等步驟。對於動作預測,我們利用一個高效簡單的策略頭 π 來預測動作 。根據先前的工作,我們使用 6-DoF 來表達 Franka Emika Panda 機械手臂的末端執行器位姿。 6 自由度包含末端執行器位置
。根據先前的工作,我們使用 6-DoF 來表達 Franka Emika Panda 機械手臂的末端執行器位姿。 6 自由度包含末端執行器位置 表示三維座標,方向
表示三維座標,方向 表示旋轉矩陣。如果訓練抓取任務,我們將抓夾狀態加入到位姿勢預測中,從而實現 7-DoF 控制。
表示旋轉矩陣。如果訓練抓取任務,我們將抓夾狀態加入到位姿勢預測中,從而實現 7-DoF 控制。 狀態空間模型 (SSM)
 ,將 1D 輸入序列
,將 1D 輸入序列 投影到 1D 輸出序列
投影到 1D 輸出序列 。 SSM 由三個關鍵參數組成:狀態矩陣
。 SSM 由三個關鍵參數組成:狀態矩陣 ,輸入矩陣
,輸入矩陣 ,輸出矩陣
,輸出矩陣 。 SSM 可以表示為:
。 SSM 可以表示為:
 和
和 。離散化採用零階保持法,定義如下:
。離散化採用零階保持法,定義如下: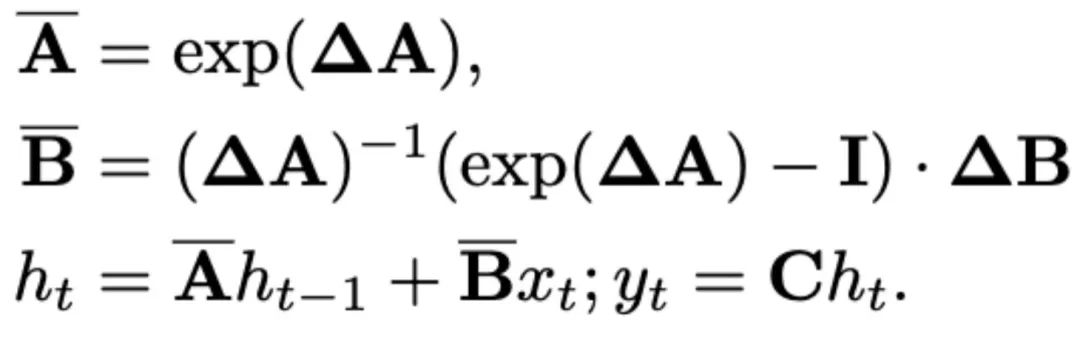
 ,實現更好的內容感知推理。下圖 3 中展示了 Mamba block 的詳細資訊。
,實現更好的內容感知推理。下圖 3 中展示了 Mamba block 的詳細資訊。 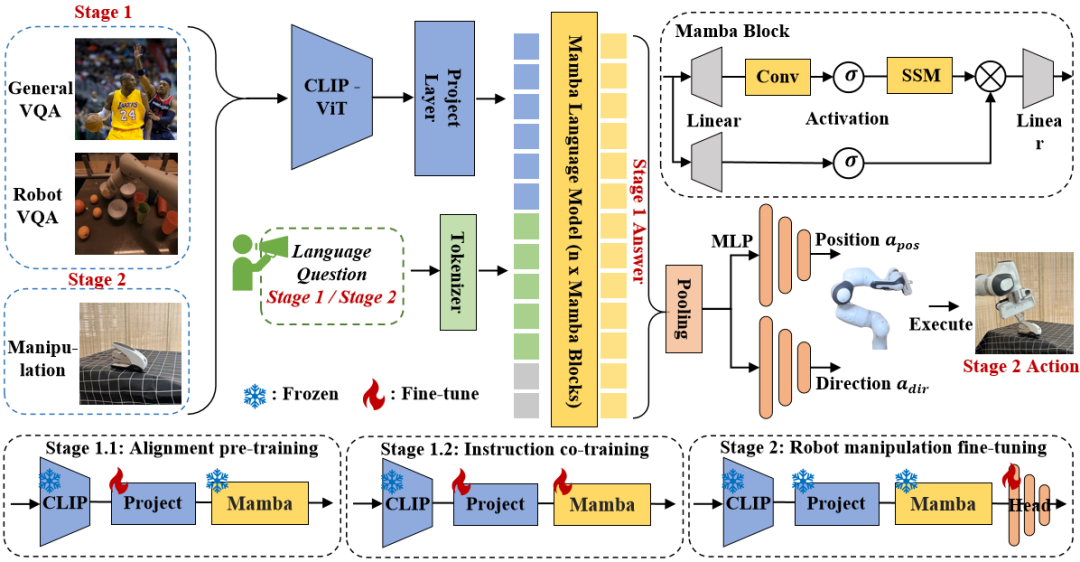
 ,其中 B 和 N 分別表示 batch size 和 token 數。與最近的 MLLMs 不同,我們不採用視覺編碼器整合技術,這種技術使用了多種骨幹網路(即 DINOv2、CLIP-ConvNeXt、CLIP-ViT)進行影像特徵擷取。整合引入了額外的計算成本,嚴重影響了機器人 MLLM 在現實世界中的實用性。因此,我們證明了,當高品質數據和適當的訓練策略結合時,簡單且直接的模型設計也能實現強大的推理能力。為了使 LLM 理解視覺特徵,我們使用多層感知器(MLP)將視覺編碼器連接到 LLM。透過這個簡單的跨模態連接器,RoboMamba 可以將視覺訊息轉換為語言嵌入空間
,其中 B 和 N 分別表示 batch size 和 token 數。與最近的 MLLMs 不同,我們不採用視覺編碼器整合技術,這種技術使用了多種骨幹網路(即 DINOv2、CLIP-ConvNeXt、CLIP-ViT)進行影像特徵擷取。整合引入了額外的計算成本,嚴重影響了機器人 MLLM 在現實世界中的實用性。因此,我們證明了,當高品質數據和適當的訓練策略結合時,簡單且直接的模型設計也能實現強大的推理能力。為了使 LLM 理解視覺特徵,我們使用多層感知器(MLP)將視覺編碼器連接到 LLM。透過這個簡單的跨模態連接器,RoboMamba 可以將視覺訊息轉換為語言嵌入空間 。
。  ,然後與視覺 token 連接(cat)並輸入 Mamba。我們利用 Mamba 強大的序列建模來理解多模態訊息,並使用有效的訓練策略來開發視覺推理能力(如下一節所述)。輸出 token (
,然後與視覺 token 連接(cat)並輸入 Mamba。我們利用 Mamba 強大的序列建模來理解多模態訊息,並使用有效的訓練策略來開發視覺推理能力(如下一節所述)。輸出 token ( ) 然後被解碼(det),產生自然語言回應
) 然後被解碼(det),產生自然語言回應 。模型的前向過程可以表示如下:
。模型的前向過程可以表示如下:
Stage 1.1:對齊預訓練。
Stage 1.2:指令共同訓練。


以上是北大推出全新機器人多模態大模型!面向通用和機器人場景的高效推理和操作的詳細內容。更多資訊請關注PHP中文網其他相關文章!

熱AI工具

Undresser.AI Undress
人工智慧驅動的應用程序,用於創建逼真的裸體照片

AI Clothes Remover
用於從照片中去除衣服的線上人工智慧工具。

Undress AI Tool
免費脫衣圖片

Clothoff.io
AI脫衣器

Video Face Swap
使用我們完全免費的人工智慧換臉工具,輕鬆在任何影片中換臉!

熱門文章
熱工具

記事本++7.3.1
好用且免費的程式碼編輯器

SublimeText3漢化版
中文版,非常好用

禪工作室 13.0.1
強大的PHP整合開發環境

Dreamweaver CS6
視覺化網頁開發工具

SublimeText3 Mac版
神級程式碼編輯軟體(SublimeText3)



 一鍵生成PPT! Kimi :讓「PPT民工」先浪起來
Aug 01, 2024 pm 03:28 PM
一鍵生成PPT! Kimi :讓「PPT民工」先浪起來
Aug 01, 2024 pm 03:28 PM
Kimi:一句話,十幾秒鐘,一份PPT就新鮮出爐了。 PPT這玩意兒,可太招人煩了!開個碰頭會,要有PPT;寫個週報,要做PPT;拉個投資,要展示PPT;就連控訴出軌,都得發個PPT。大學比較像是學了個PPT專業,上課看PPT,下課做PPT。或許,37年前丹尼斯・奧斯汀發明PPT時也沒想到,有一天PPT竟然如此氾濫成災。嗎嘍們做PPT的苦逼經歷,說起來都是淚。 「一份二十多頁的PPT花了三個月,改了幾十遍,看到PPT都想吐」;「最巔峰的時候,一天做了五個PPT,連呼吸都是PPT」;「臨時開個會,都要做個
 值得你花時間看的擴散模型教程,來自普渡大學
Apr 07, 2024 am 09:01 AM
值得你花時間看的擴散模型教程,來自普渡大學
Apr 07, 2024 am 09:01 AM
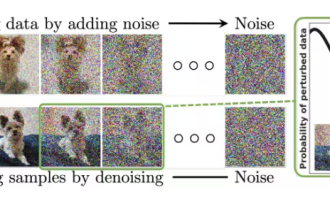
Diffusion不僅可以更好地模仿,而且可以進行「創作」。擴散模型(DiffusionModel)是一種影像生成模型。與先前AI領域大名鼎鼎的GAN、VAE等演算法,擴散模型另闢蹊徑,其主要想法是先對影像增加噪聲,再逐步去噪的過程。其中如何去噪還原原影像是演算法的核心部分。最終演算法能夠從一張隨機的雜訊影像中產生影像。近年來,生成式AI的驚人成長將文字轉換為圖像生成、視訊生成等領域的許多令人興奮的應用提供了支援。這些生成工具背後的基本原理是擴散的概念,這是一種特殊的取樣機制,克服了先前的方法中被
 CVPR 2024全部獎項公佈!近萬人線下參會,Google華人研究員獲最佳論文獎
Jun 20, 2024 pm 05:43 PM
CVPR 2024全部獎項公佈!近萬人線下參會,Google華人研究員獲最佳論文獎
Jun 20, 2024 pm 05:43 PM
北京時間6月20日凌晨,在西雅圖舉辦的國際電腦視覺頂會CVPR2024正式公佈了最佳論文等獎項。今年共有10篇論文獲獎,其中2篇最佳論文,2篇最佳學生論文,另外還有2篇最佳論文提名和4篇最佳學生論文提名。電腦視覺(CV)領域的頂級會議是CVPR,每年都會吸引大量研究機構和高校參會。根據統計,今年共提交了11532份論文,2719篇被接收,錄取率為23.6%。根據佐治亞理工學院對CVPR2024的數據統計分析,從研究主題來看,論文數量最多的是圖像和視頻合成與生成(Imageandvideosyn
 從裸機到700億參數大模型,這裡有一個教程,還有現成可用的腳本
Jul 24, 2024 pm 08:13 PM
從裸機到700億參數大模型,這裡有一個教程,還有現成可用的腳本
Jul 24, 2024 pm 08:13 PM
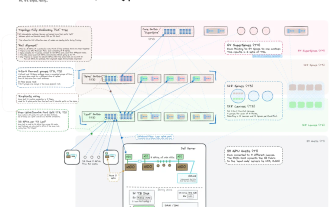
我們知道LLM是在大規模電腦叢集上使用海量資料訓練得到的,本站曾介紹過不少用於輔助和改進LLM訓練流程的方法和技術。而今天,我們要分享的是一篇深入技術底層的文章,介紹如何將一堆連作業系統也沒有的「裸機」變成用來訓練LLM的電腦叢集。這篇文章來自於AI新創公司Imbue,該公司致力於透過理解機器的思維方式來實現通用智慧。當然,將一堆連作業系統也沒有的「裸機」變成用於訓練LLM的電腦叢集並不是一個輕鬆的過程,充滿了探索和試錯,但Imbue最終成功訓練了一個700億參數的LLM,並在此過程中積累
 PyCharm社群版安裝指南:快速掌握全部步驟
Jan 27, 2024 am 09:10 AM
PyCharm社群版安裝指南:快速掌握全部步驟
Jan 27, 2024 am 09:10 AM
快速入門PyCharm社群版:詳細安裝教學全解析導言:PyCharm是一個功能強大的Python整合開發環境(IDE),它提供了一套全面的工具,可以幫助開發人員更有效率地編寫Python程式碼。本文將詳細介紹如何安裝PyCharm社群版,並提供具體的程式碼範例,幫助初學者快速入門。第一步:下載和安裝PyCharm社群版要使用PyCharm,首先需要從其官方網站上下
 AI在用 | AI製作獨居女孩生活Vlog,3天狂攬萬點讚量
Aug 07, 2024 pm 10:53 PM
AI在用 | AI製作獨居女孩生活Vlog,3天狂攬萬點讚量
Aug 07, 2024 pm 10:53 PM
機器之能報道編輯:楊文以大模型、AIGC為代表的人工智慧浪潮已經在悄悄改變我們生活及工作方式,但絕大部分人依然不知道該如何使用。因此,我們推出了「AI在用」專欄,透過直覺、有趣且簡潔的人工智慧使用案例,來具體介紹AI使用方法,並激發大家思考。我們也歡迎讀者投稿親自實踐的創新用例。影片連結:https://mp.weixin.qq.com/s/2hX_i7li3RqdE4u016yGhQ最近,獨居女孩的生活Vlog在小紅書上走紅。一個插畫風格的動畫,再配上幾句治癒系文案,短短幾天就能輕鬆狂攬上
 技術入門者必看:C語言和Python難易度解析
Mar 22, 2024 am 10:21 AM
技術入門者必看:C語言和Python難易度解析
Mar 22, 2024 am 10:21 AM
標題:技術入門者必看:C語言和Python難易度解析,需要具體程式碼範例在當今數位化時代,程式設計技術已成為一項越來越重要的能力。無論是想要從事軟體開發、數據分析、人工智慧等領域,還是僅僅出於興趣學習編程,選擇一門合適的程式語言是第一步。而在眾多程式語言中,C語言和Python作為兩種廣泛應用的程式語言,各有其特色。本文將對C語言和Python的難易度進行解析
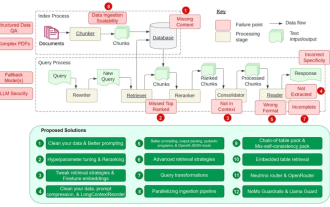 細數RAG的12個痛點,英偉達高級架構師親授解決方案
Jul 11, 2024 pm 01:53 PM
細數RAG的12個痛點,英偉達高級架構師親授解決方案
Jul 11, 2024 pm 01:53 PM
檢索增強式產生(RAG)是一種使用檢索提升語言模型的技術。具體來說,就是在語言模型生成答案之前,先從廣泛的文檔資料庫中檢索相關信息,然後利用這些信息來引導生成過程。這種技術能大幅提升內容的準確性和相關性,並能有效緩解幻覺問題,提高知識更新的速度,並增強內容生成的可追溯性。 RAG無疑是最令人興奮的人工智慧研究領域之一。有關RAG的更多詳情請參閱本站專欄文章《專補大模型短板的RAG有哪些新進展?這篇綜述講明白了》。但RAG也並非完美,使用者在使用時也常會遭遇一些「痛點」。近日,英偉達生成式AI高階解決
