

使用遺傳演算法進行點模擬 - 第 2 部分

本教學透過添加精英突出顯示、增加障礙複雜性、「達到」計數器和交叉育種等功能來增強遺傳演算法模擬。讓我們來分解一下改進。
第 1 部分:視覺增強與障礙複雜性
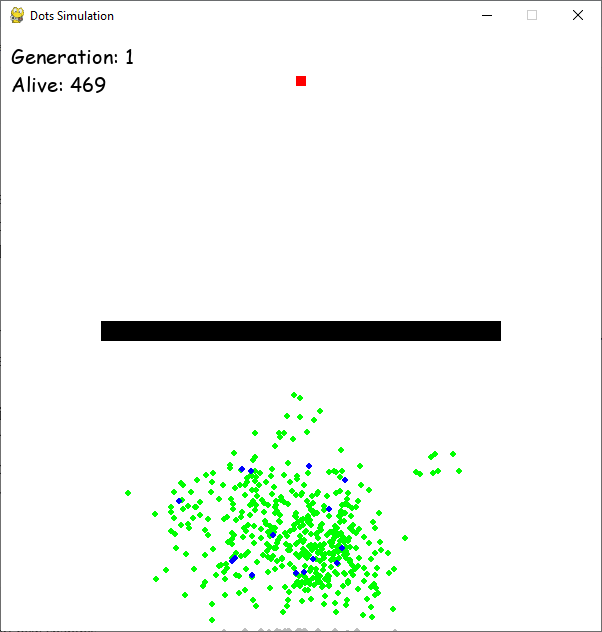
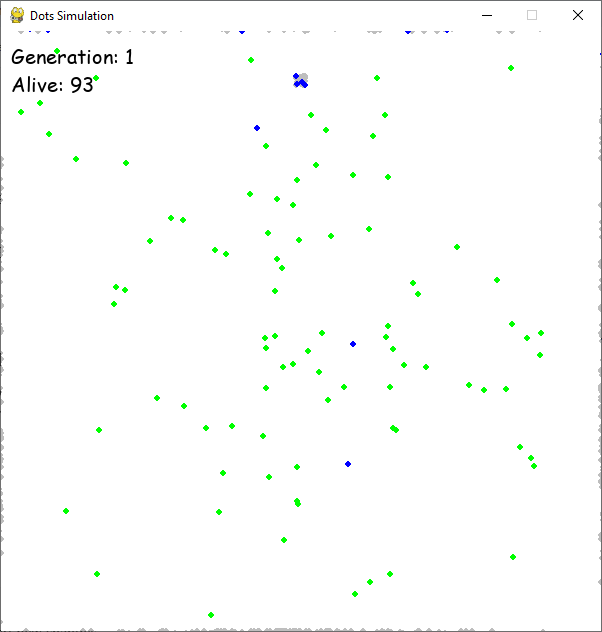
模擬升級為透過將精英點(上一代中表現最好的點)著色為藍色來在視覺上區分它們。 這是透過向 is_elite 類別的 Dot 方法添加 draw 布林參數並有條件地應用藍色來實現的。 Population 類別的 draw 方法被修改為根據點是否在 elites 列表中傳遞此佈林值。
障礙生成經過重構,具有更大的彈性。 Obstacle 和 Goal 類別被移到單獨的 obstacles.py 檔案中,從而促進更清晰的程式碼組織。 引入了 constants.py 檔案來保存螢幕尺寸和人口規模等全域變量,從而防止檔案之間出現冗餘。 OBSTACLES0 中定義了多種障礙物配置(OBSTACLES1、OBSTACLES2、OBSTACLES3、OBSTACLES4、OBSTACLES5、obstacles.py),可以在不同的挑戰等級之間輕鬆切換。 主腳本導入這些配置並選擇所需的配置。 新增了檢查以確保目標始終存在,即使使用透過清單理解產生的障礙清單(如 OBSTACLES4)也是如此。
新增了「已達到」計數器,用於顯示上一代成功達到目標的點數。 這是透過修改 generate_next_generation 類別中的 Population 方法來計數並傳回該值來實現的。 然後主循環在螢幕上顯示此計數。
第 2 部分:實現單點交叉
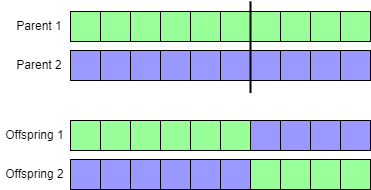
模擬從複製過渡到單點交叉以產生後代。 crossover 類別方法被加入到 Dot 類別中。此方法將兩個父點作為輸入,選擇一個隨機交叉點,並透過組合每個父點的運動序列的部分(表示為方向向量清單)來建立兩個子代。 generate_next_generation 方法已更新為利用此交叉方法,產生後代對而不是單一克隆。 突變繼續應用於後代。
改進的模擬提供了增強的可視化、可調節的難度和更複雜的育種機制,使其成為更強大和更有洞察力的遺傳演算法範例。提到的未來改進包括保存/加載功能和速度優化。 作者也鼓勵加入他們的 Discord 社群以進行進一步的合作。
以上是使用遺傳演算法進行點模擬 - 第 2 部分的詳細內容。更多資訊請關注PHP中文網其他相關文章!

熱AI工具

Undresser.AI Undress
人工智慧驅動的應用程序,用於創建逼真的裸體照片

AI Clothes Remover
用於從照片中去除衣服的線上人工智慧工具。

Undress AI Tool
免費脫衣圖片

Clothoff.io
AI脫衣器

Video Face Swap
使用我們完全免費的人工智慧換臉工具,輕鬆在任何影片中換臉!

熱門文章
熱工具

記事本++7.3.1
好用且免費的程式碼編輯器

SublimeText3漢化版
中文版,非常好用

禪工作室 13.0.1
強大的PHP整合開發環境

Dreamweaver CS6
視覺化網頁開發工具

SublimeText3 Mac版
神級程式碼編輯軟體(SublimeText3)



 Python vs.C:申請和用例
Apr 12, 2025 am 12:01 AM
Python vs.C:申請和用例
Apr 12, 2025 am 12:01 AM
Python适合数据科学、Web开发和自动化任务,而C 适用于系统编程、游戏开发和嵌入式系统。Python以简洁和强大的生态系统著称,C 则以高性能和底层控制能力闻名。
 您可以在2小時內學到多少python?
Apr 09, 2025 pm 04:33 PM
您可以在2小時內學到多少python?
Apr 09, 2025 pm 04:33 PM
兩小時內可以學到Python的基礎知識。 1.學習變量和數據類型,2.掌握控制結構如if語句和循環,3.了解函數的定義和使用。這些將幫助你開始編寫簡單的Python程序。
 Python:遊戲,Guis等
Apr 13, 2025 am 12:14 AM
Python:遊戲,Guis等
Apr 13, 2025 am 12:14 AM
Python在遊戲和GUI開發中表現出色。 1)遊戲開發使用Pygame,提供繪圖、音頻等功能,適合創建2D遊戲。 2)GUI開發可選擇Tkinter或PyQt,Tkinter簡單易用,PyQt功能豐富,適合專業開發。
 2小時的Python計劃:一種現實的方法
Apr 11, 2025 am 12:04 AM
2小時的Python計劃:一種現實的方法
Apr 11, 2025 am 12:04 AM
2小時內可以學會Python的基本編程概念和技能。 1.學習變量和數據類型,2.掌握控制流(條件語句和循環),3.理解函數的定義和使用,4.通過簡單示例和代碼片段快速上手Python編程。
 Python:探索其主要應用程序
Apr 10, 2025 am 09:41 AM
Python:探索其主要應用程序
Apr 10, 2025 am 09:41 AM
Python在web開發、數據科學、機器學習、自動化和腳本編寫等領域有廣泛應用。 1)在web開發中,Django和Flask框架簡化了開發過程。 2)數據科學和機器學習領域,NumPy、Pandas、Scikit-learn和TensorFlow庫提供了強大支持。 3)自動化和腳本編寫方面,Python適用於自動化測試和系統管理等任務。
 Python與C:學習曲線和易用性
Apr 19, 2025 am 12:20 AM
Python與C:學習曲線和易用性
Apr 19, 2025 am 12:20 AM
Python更易學且易用,C 則更強大但複雜。 1.Python語法簡潔,適合初學者,動態類型和自動內存管理使其易用,但可能導致運行時錯誤。 2.C 提供低級控制和高級特性,適合高性能應用,但學習門檻高,需手動管理內存和類型安全。
 Python和時間:充分利用您的學習時間
Apr 14, 2025 am 12:02 AM
Python和時間:充分利用您的學習時間
Apr 14, 2025 am 12:02 AM
要在有限的時間內最大化學習Python的效率,可以使用Python的datetime、time和schedule模塊。 1.datetime模塊用於記錄和規劃學習時間。 2.time模塊幫助設置學習和休息時間。 3.schedule模塊自動化安排每週學習任務。
 Python:自動化,腳本和任務管理
Apr 16, 2025 am 12:14 AM
Python:自動化,腳本和任務管理
Apr 16, 2025 am 12:14 AM
Python在自動化、腳本編寫和任務管理中表現出色。 1)自動化:通過標準庫如os、shutil實現文件備份。 2)腳本編寫:使用psutil庫監控系統資源。 3)任務管理:利用schedule庫調度任務。 Python的易用性和豐富庫支持使其在這些領域中成為首選工具。
