

Python使用OpenCV進行標定

這篇文章主要介紹了關於Python使用OpenCV進行標定,有著一定的參考價值,現在分享給大家,有需要的朋友可以參考一下
本文結合OpenCV官方樣例,對官方樣例中的程式碼進行修改,使其能夠正常運行,並對自己採集的數據進行實驗和講解。
一、準備
OpenCV使用棋盤格板進行標定,如下圖所示。為了標定相機,我們需要輸入一系列三維點和它們對應的二維影像點。在黑白相間的棋盤格上,二維影像點很容易透過角點偵測找到。而對於真實世界中的三維點呢?由於我們採集中,是將相機放在一個地方,而將棋盤格定標板進行移動變換不同的位置,然後對其進行拍攝。所以我們要知道(X,Y,Z)的值。但簡單來說,我們定義棋盤格所在平面為XY平面,也就是Z=0。對於定標板來說,我們可以知道棋盤格的方塊尺寸,例如30mm,這樣我們就可以把棋盤格上的角點座標定義為(0,0,0),(30,0,0),( 60,0,0),···,這個結果的單位是mm。
3D點稱為object points,2D映像點稱為image points。
二、偵測棋盤格角點
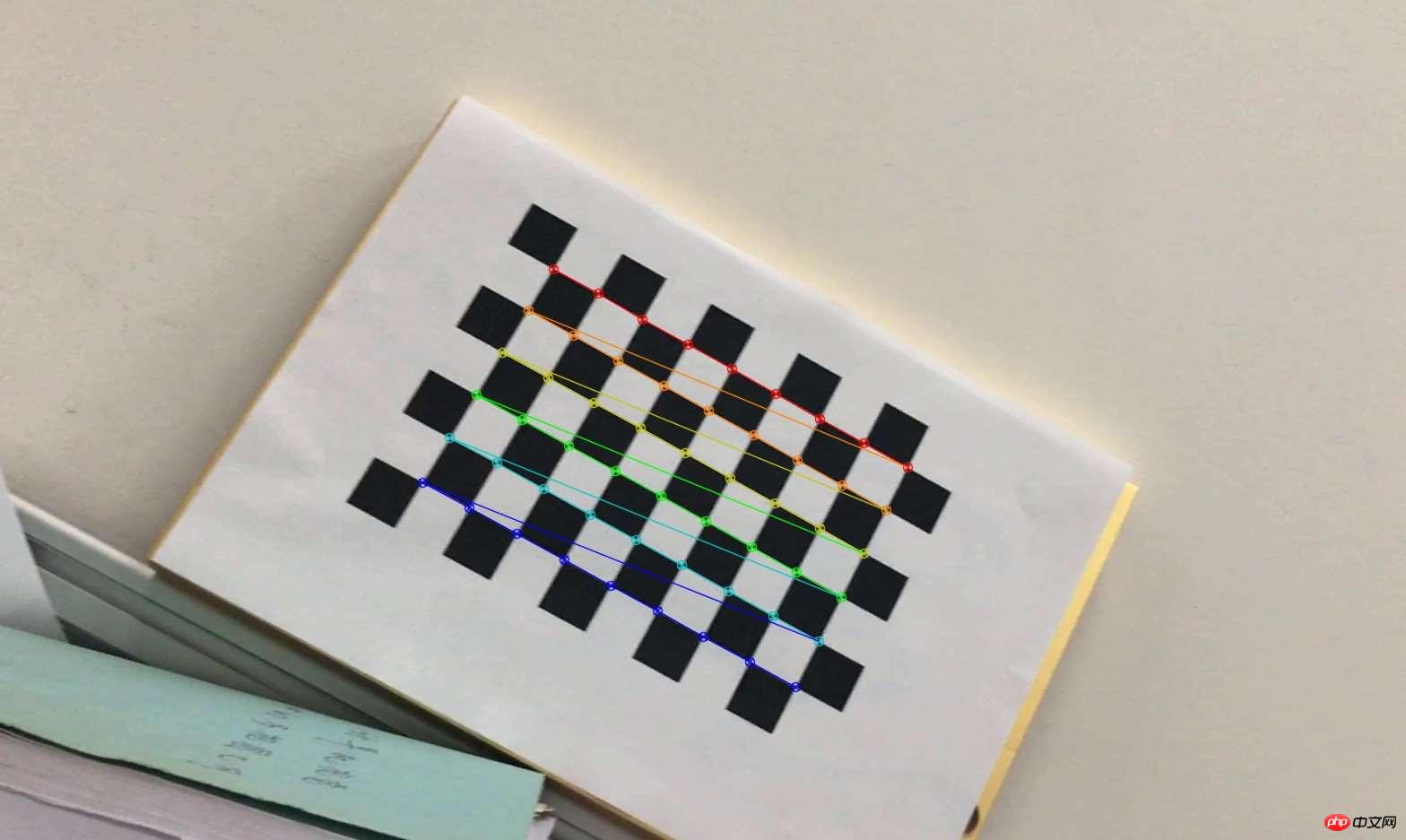
為了找到棋盤格模板,我們使用openCV中的函數cv2.findChessboardCorners()。我們也需要告訴程式我們使用的模板是什麼規格的,例如8*8的棋盤格或5*5棋盤格等,建議使用x方向和y方向個數不相等的棋盤格模板。下面實驗中,我們使用的是10*7的棋盤格,每個方格邊長是20mm,也就是含有9*6的內部角點。這個函數如果偵測到模板,會傳回對應的角點,並傳回true。當然不一定所有的圖像都能找到所需的模板,所以我們可以使用多個圖像來定標。除了使用棋盤格,我們還可以使用圓點陣,對應的函數為cv2.findCirclesGrid()。
找到角點後,我們可以使用cv2.cornerSubPix()可以得到更為準確的角點像素座標。我們也可以使用cv2.drawChessboardCorners()將角點繪製到圖片上顯示。如下圖所示:
三、標定
透過上面的步驟,我們得到了用於標定的三維點和與其對應的圖像上的二維點對。我們使用cv2.calibrateCamera()進行標定,這個函數會傳回標定結果、相機的內參數矩陣、畸變係數、旋轉矩陣和平移向量。
四、去畸變
第三步我們已經得到了相機內參和畸變係數,在將影像去畸變之前,我們還可以使用cv.getOptimalNewCameraMatrix()優化內參數和畸變係數,透過設定自由自由比例因子alpha。當alpha設為0的時候,會傳回一個剪裁過的將去畸變後不想要的像素去掉的內參數和畸變係數;當alpha設為1的時候,將會傳回一個包含額外黑色像素點的內參數和畸變係數,並傳回一個ROI用於將其剪裁掉。
然後我們就可以使用新得到的內參數矩陣和畸變係數對影像進行去畸變了。有兩種方法進行去畸變:
(1)使用cv2.undistort()
這是一個最直接的辦法,只用直接呼叫函數就可以得到去畸變的圖像,使用上面的ROI可以對其進行剪裁。程式碼如下:
# undistort dst = cv2.undistort(img, mtx, dist, None, newcameramtx) # crop the image x,y,w,h = roi dst = dst[y:y+h, x:x+w] cv2.imwrite('calibresult.png',dst)
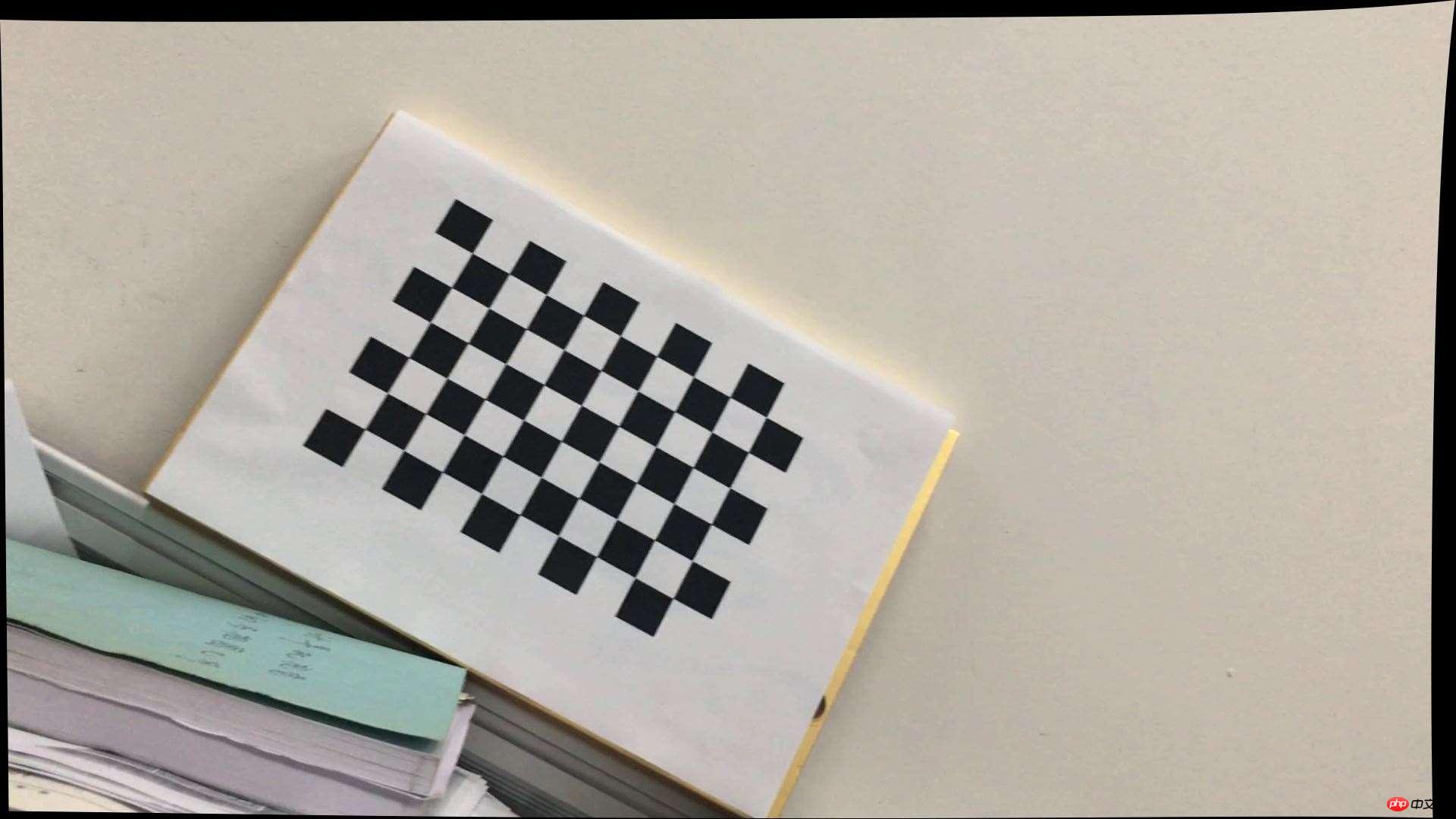
下圖顯示將一張圖片去變形後,保留黑色像素的結果:
(2)使用remmaping
這是一個分兩步驟的方法,首先計算一個從畸變圖像到非畸變圖像的映射,然後使用這個映射關係對影像進行去畸變。
程式碼如下:
# undistort mapx,mapy = cv2.initUndistortRectifyMap(mtx,dist,None,newcameramtx,(w,h),5) dst = cv2.remap(img,mapx,mapy,cv2.INTER_LINEAR) # crop the image x,y,w,h = roi dst = dst[y:y+h, x:x+w] cv2.imwrite('calibresult.png',dst)
#五、反投影誤差
透過反投影誤差,我們可以來評估結果的好壞。越接近0,表示結果越理想。透過先前計算的內參數矩陣、畸變係數、旋轉矩陣和平移向量,使用cv2.projectPoints()計算三維點到二維影像的投影,然後計算反投影得到的點與影像上偵測到的點的誤差,最後計算一個對於所有標定影像的平均誤差,這個值就是反投影誤差。
程式碼
所有步驟的程式碼如下所示:
#coding:utf-8 import cv2 import numpy as np import glob # 找棋盘格角点 # 阈值 criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001) #棋盘格模板规格 w = 9 h = 6 # 世界坐标系中的棋盘格点,例如(0,0,0), (1,0,0), (2,0,0) ....,(8,5,0),去掉Z坐标,记为二维矩阵 objp = np.zeros((w*h,3), np.float32) objp[:,:2] = np.mgrid[0:w,0:h].T.reshape(-1,2) # 储存棋盘格角点的世界坐标和图像坐标对 objpoints = [] # 在世界坐标系中的三维点 imgpoints = [] # 在图像平面的二维点 images = glob.glob('calib/*.png') for fname in images: img = cv2.imread(fname) gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY) # 找到棋盘格角点 ret, corners = cv2.findChessboardCorners(gray, (w,h),None) # 如果找到足够点对,将其存储起来 if ret == True: cv2.cornerSubPix(gray,corners,(11,11),(-1,-1),criteria) objpoints.append(objp) imgpoints.append(corners) # 将角点在图像上显示 cv2.drawChessboardCorners(img, (w,h), corners, ret) cv2.imshow('findCorners',img) cv2.waitKey(1) cv2.destroyAllWindows() # 标定 ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(objpoints, imgpoints, gray.shape[::-1], None, None) # 去畸变 img2 = cv2.imread('calib/00169.png') h, w = img2.shape[:2] newcameramtx, roi=cv2.getOptimalNewCameraMatrix(mtx,dist,(w,h),0,(w,h)) # 自由比例参数 dst = cv2.undistort(img2, mtx, dist, None, newcameramtx) # 根据前面ROI区域裁剪图片 #x,y,w,h = roi #dst = dst[y:y+h, x:x+w] cv2.imwrite('calibresult.png',dst) # 反投影误差 total_error = 0 for i in xrange(len(objpoints)): imgpoints2, _ = cv2.projectPoints(objpoints[i], rvecs[i], tvecs[i], mtx, dist) error = cv2.norm(imgpoints[i],imgpoints2, cv2.NORM_L2)/len(imgpoints2) total_error += error print "total error: ", total_error/len(objpoints)
相關推薦:
以上是Python使用OpenCV進行標定的詳細內容。更多資訊請關注PHP中文網其他相關文章!

熱AI工具

Undresser.AI Undress
人工智慧驅動的應用程序,用於創建逼真的裸體照片

AI Clothes Remover
用於從照片中去除衣服的線上人工智慧工具。

Undress AI Tool
免費脫衣圖片

Clothoff.io
AI脫衣器

Video Face Swap
使用我們完全免費的人工智慧換臉工具,輕鬆在任何影片中換臉!

熱門文章
熱工具

記事本++7.3.1
好用且免費的程式碼編輯器

SublimeText3漢化版
中文版,非常好用

禪工作室 13.0.1
強大的PHP整合開發環境

Dreamweaver CS6
視覺化網頁開發工具

SublimeText3 Mac版
神級程式碼編輯軟體(SublimeText3)



 PHP和Python:解釋了不同的範例
Apr 18, 2025 am 12:26 AM
PHP和Python:解釋了不同的範例
Apr 18, 2025 am 12:26 AM
PHP主要是過程式編程,但也支持面向對象編程(OOP);Python支持多種範式,包括OOP、函數式和過程式編程。 PHP適合web開發,Python適用於多種應用,如數據分析和機器學習。
 在PHP和Python之間進行選擇:指南
Apr 18, 2025 am 12:24 AM
在PHP和Python之間進行選擇:指南
Apr 18, 2025 am 12:24 AM
PHP適合網頁開發和快速原型開發,Python適用於數據科學和機器學習。 1.PHP用於動態網頁開發,語法簡單,適合快速開發。 2.Python語法簡潔,適用於多領域,庫生態系統強大。
 sublime怎麼運行代碼python
Apr 16, 2025 am 08:48 AM
sublime怎麼運行代碼python
Apr 16, 2025 am 08:48 AM
在 Sublime Text 中運行 Python 代碼,需先安裝 Python 插件,再創建 .py 文件並編寫代碼,最後按 Ctrl B 運行代碼,輸出會在控制台中顯示。
 PHP和Python:深入了解他們的歷史
Apr 18, 2025 am 12:25 AM
PHP和Python:深入了解他們的歷史
Apr 18, 2025 am 12:25 AM
PHP起源於1994年,由RasmusLerdorf開發,最初用於跟踪網站訪問者,逐漸演變為服務器端腳本語言,廣泛應用於網頁開發。 Python由GuidovanRossum於1980年代末開發,1991年首次發布,強調代碼可讀性和簡潔性,適用於科學計算、數據分析等領域。
 Python vs. JavaScript:學習曲線和易用性
Apr 16, 2025 am 12:12 AM
Python vs. JavaScript:學習曲線和易用性
Apr 16, 2025 am 12:12 AM
Python更適合初學者,學習曲線平緩,語法簡潔;JavaScript適合前端開發,學習曲線較陡,語法靈活。 1.Python語法直觀,適用於數據科學和後端開發。 2.JavaScript靈活,廣泛用於前端和服務器端編程。
 Golang vs. Python:性能和可伸縮性
Apr 19, 2025 am 12:18 AM
Golang vs. Python:性能和可伸縮性
Apr 19, 2025 am 12:18 AM
Golang在性能和可擴展性方面優於Python。 1)Golang的編譯型特性和高效並發模型使其在高並發場景下表現出色。 2)Python作為解釋型語言,執行速度較慢,但通過工具如Cython可優化性能。
 vscode在哪寫代碼
Apr 15, 2025 pm 09:54 PM
vscode在哪寫代碼
Apr 15, 2025 pm 09:54 PM
在 Visual Studio Code(VSCode)中編寫代碼簡單易行,只需安裝 VSCode、創建項目、選擇語言、創建文件、編寫代碼、保存並運行即可。 VSCode 的優點包括跨平台、免費開源、強大功能、擴展豐富,以及輕量快速。
 notepad 怎麼運行python
Apr 16, 2025 pm 07:33 PM
notepad 怎麼運行python
Apr 16, 2025 pm 07:33 PM
在 Notepad 中運行 Python 代碼需要安裝 Python 可執行文件和 NppExec 插件。安裝 Python 並為其添加 PATH 後,在 NppExec 插件中配置命令為“python”、參數為“{CURRENT_DIRECTORY}{FILE_NAME}”,即可在 Notepad 中通過快捷鍵“F6”運行 Python 代碼。
