

Photoshop利用图层样式绘制电影中逼真的3D机器人EVA

本文小编姜维大家带来如何使用Photoshop绘制电影中的3D机器人EVA,教程有些复杂,喜欢的朋友可以一起来学习
实现目标的方法有很多种,但掌握原理什么的最重要了。因为只要掌握了原理,我们甚至就可以画出更为复杂的效果。
最终效果
EVA的故事与模型设定:
1、EVA的基本形状是一个蛋形的,也就是一个椭圆围绕其长直径旋转一周得到的立体圆形。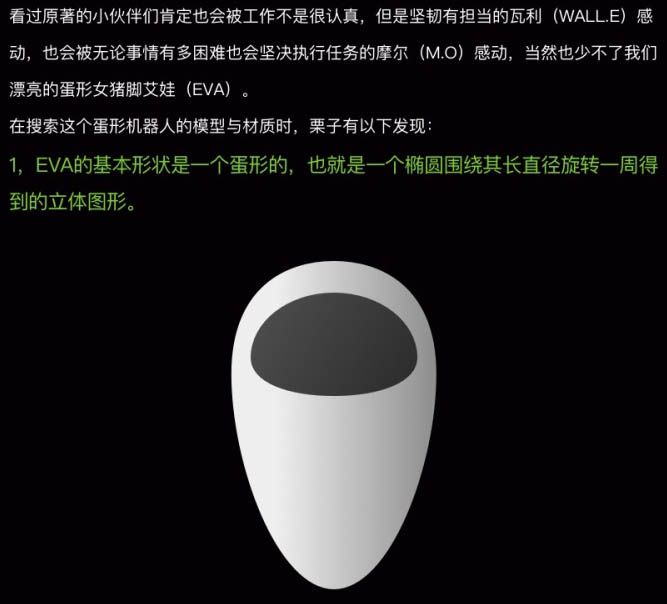
2、EVA变形(容我这么形容)之后,分成4部分,头部,身体,和两手臂。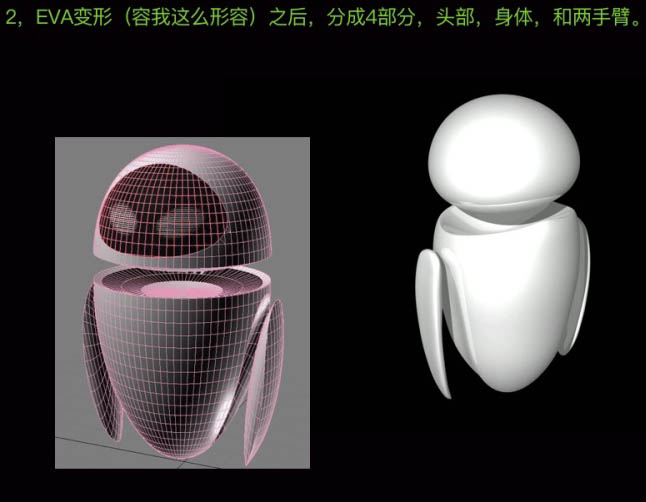
3、根据原著,EVA的材质可以设定为白色陶瓷。
绘制过程:
1、拆解。
2、头部绘制:
新建1024 * 1024,分辨率为72的画布,如下图。
通过调节椭圆形状得到头部轮廓,通过调节内发光与渐变叠加得到头部基础。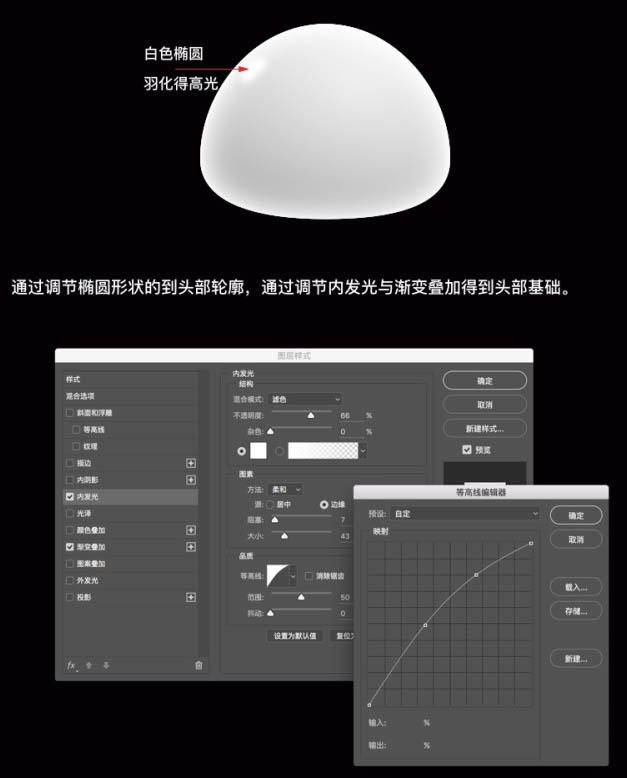
通过调节锚点让椭圆变形,并羽化,得到高光。
同理,通过高光,反射光,以及布尔运算,调节锚点等得到脸部底色及眼睛。
面罩上的黑白条纹可用定义图案功能实现,具体过程如下:

熱AI工具

Undresser.AI Undress
人工智慧驅動的應用程序,用於創建逼真的裸體照片

AI Clothes Remover
用於從照片中去除衣服的線上人工智慧工具。

Undress AI Tool
免費脫衣圖片

Clothoff.io
AI脫衣器

Video Face Swap
使用我們完全免費的人工智慧換臉工具,輕鬆在任何影片中換臉!

熱門文章
熱工具

記事本++7.3.1
好用且免費的程式碼編輯器

SublimeText3漢化版
中文版,非常好用

禪工作室 13.0.1
強大的PHP整合開發環境

Dreamweaver CS6
視覺化網頁開發工具

SublimeText3 Mac版
神級程式碼編輯軟體(SublimeText3)



 為何在自動駕駛方面Gaussian Splatting如此受歡迎,開始放棄NeRF?
Jan 17, 2024 pm 02:57 PM
為何在自動駕駛方面Gaussian Splatting如此受歡迎,開始放棄NeRF?
Jan 17, 2024 pm 02:57 PM
寫在前面&筆者的個人理解三維Gaussiansplatting(3DGS)是近年來在顯式輻射場和電腦圖形學領域出現的一種變革性技術。這種創新方法的特點是使用了數百萬個3D高斯,這與神經輻射場(NeRF)方法有很大的不同,後者主要使用隱式的基於座標的模型將空間座標映射到像素值。 3DGS憑藉其明確的場景表示和可微分的渲染演算法,不僅保證了即時渲染能力,而且引入了前所未有的控制和場景編輯水平。這將3DGS定位為下一代3D重建和表示的潛在遊戲規則改變者。為此我們首次系統性地概述了3DGS領域的最新發展與關
 選擇相機還是光達?實現穩健的三維目標檢測的最新綜述
Jan 26, 2024 am 11:18 AM
選擇相機還是光達?實現穩健的三維目標檢測的最新綜述
Jan 26, 2024 am 11:18 AM
0.寫在前面&&個人理解自動駕駛系統依賴先進的感知、決策和控制技術,透過使用各種感測器(如相機、光達、雷達等)來感知周圍環境,並利用演算法和模型進行即時分析和決策。這使得車輛能夠識別道路標誌、檢測和追蹤其他車輛、預測行人行為等,從而安全地操作和適應複雜的交通環境。這項技術目前引起了廣泛的關注,並認為是未來交通領域的重要發展領域之一。但是,讓自動駕駛變得困難的是弄清楚如何讓汽車了解周圍發生的事情。這需要自動駕駛系統中的三維物體偵測演算法可以準確地感知和描述周圍環境中的物體,包括它們的位置、
 2 個月不見,人形機器人 Walker S 會摺衣服了
Apr 03, 2024 am 08:01 AM
2 個月不見,人形機器人 Walker S 會摺衣服了
Apr 03, 2024 am 08:01 AM
機器之能報道編輯:吳昕國內版的人形機器人+大模型組隊,首次完成疊衣服這類複雜柔性材料的操作任務。隨著融合了OpenAI多模態大模型的Figure01揭開神秘面紗,國內同行的相關進展一直備受關注。就在昨天,國內"人形機器人第一股"優必選發布了人形機器人WalkerS深入融合百度文心大模型後的首個Demo,展示了一些有趣的新功能。現在,得到百度文心大模型能力加持的WalkerS是這個樣子的。和Figure01一樣,WalkerS沒有走動,而是站在桌子後面完成一系列任務。它可以聽從人類的命令,折疊衣物
 AI如何使機器人更具自主性和適應性?
Jun 03, 2024 pm 07:18 PM
AI如何使機器人更具自主性和適應性?
Jun 03, 2024 pm 07:18 PM
在工業自動化技術領域,最近有兩個熱點很難被忽視:人工智慧(AI)和英偉達(Nvidia)。不要改變原內容的意思,微調內容,重寫內容,不要續寫:「不僅如此,這兩者密切相關,因為英偉達在不僅僅局限於其最開始的圖形處理單元(GPU),正在將其GPU科技擴展到數位孿生領域,同時緊密連接著新興的AI技術。泰瑞達機器人及其MiR和優傲機器人公司。 Recently,Nvidiahascoll
 第二代Ameca來了!和觀眾對答如流,臉部表情更逼真,會說幾十種語言
Mar 04, 2024 am 09:10 AM
第二代Ameca來了!和觀眾對答如流,臉部表情更逼真,會說幾十種語言
Mar 04, 2024 am 09:10 AM
人形機器人Ameca升級第二代了!最近,在世界行動通訊大會MWC2024上,世界上最先進機器人Ameca又現身了。會場周圍,Ameca引來一大波觀眾。得到GPT-4加持後,Ameca能夠對各種問題做出即時反應。 「來一段舞蹈」。當被問及是否有情感時,Ameca用一系列的面部表情做出回應,看起來非常逼真。就在前幾天,Ameca背後的英國機器人公司EngineeredArts剛剛示範了團隊最新的開發成果。影片中,機器人Ameca具備了視覺能力,能看見並描述房間整個狀況、描述具體物體。最厲害的是,她還能
 CLIP-BEVFormer:明確監督BEVFormer結構,提升長尾偵測性能
Mar 26, 2024 pm 12:41 PM
CLIP-BEVFormer:明確監督BEVFormer結構,提升長尾偵測性能
Mar 26, 2024 pm 12:41 PM
寫在前面&筆者的個人理解目前,在整個自動駕駛系統當中,感知模組扮演了其中至關重要的角色,行駛在道路上的自動駕駛車輛只有通過感知模組獲得到準確的感知結果後,才能讓自動駕駛系統中的下游規控模組做出及時、正確的判斷和行為決策。目前,具備自動駕駛功能的汽車中通常會配備包括環視相機感測器、光達感測器以及毫米波雷達感測器在內的多種數據資訊感測器來收集不同模態的信息,用於實現準確的感知任務。基於純視覺的BEV感知演算法因其較低的硬體成本和易於部署的特點,以及其輸出結果能便捷地應用於各種下游任務,因此受到工業
 牛津大學最新! Mickey:3D中的2D影像匹配SOTA! (CVPR\'24)
Apr 23, 2024 pm 01:20 PM
牛津大學最新! Mickey:3D中的2D影像匹配SOTA! (CVPR\'24)
Apr 23, 2024 pm 01:20 PM
寫在前面項目連結:https://nianticlabs.github.io/mickey/給定兩張圖片,可以透過建立圖片之間的對應關係來估計它們之間的相機姿態。通常,這些對應關係是二維到二維的,而我們估計的姿態在尺度上是不確定的。一些應用,例如隨時隨地實現即時增強現實,需要尺度度量的姿態估計,因此它們依賴外部的深度估計器來恢復尺度。本文提出了MicKey,這是一個關鍵點匹配流程,能夠夠預測三維相機空間中的度量對應關係。透過學習跨影像的三維座標匹配,我們能夠在沒有深度測試的情況下推斷度量相對
 首個自主完成人類任務機器人出現,五指靈活速度超人,大模型加持虛擬空間訓練
Mar 11, 2024 pm 12:10 PM
首個自主完成人類任務機器人出現,五指靈活速度超人,大模型加持虛擬空間訓練
Mar 11, 2024 pm 12:10 PM
這週,由OpenAI、微軟、貝佐斯和英偉達投資的機器人公司FigureAI宣布獲得接近7億美元的融資,計劃在未來一年內研發出可獨立行走的人形機器人。而特斯拉的擎天柱也屢屢傳出好消息。沒人懷疑,今年會是人形機器人爆發的一年。一家位於加拿大的機器人公司SanctuaryAI最近發布了一款全新的人形機器人Phoenix。官方號稱它能以和人類一樣的速率自主完成許多工作。世界上第一台能以人類速度自主完成任務的機器人Pheonix可以輕輕地抓取、移動並優雅地將每個物件放置在它的左右兩側。它能夠自主辨識物體的
