

簡單介紹Python遺傳演算法Geatpy工具箱

【相關推薦:Python3影片教學 】
一、 什麼是遺傳演算法?
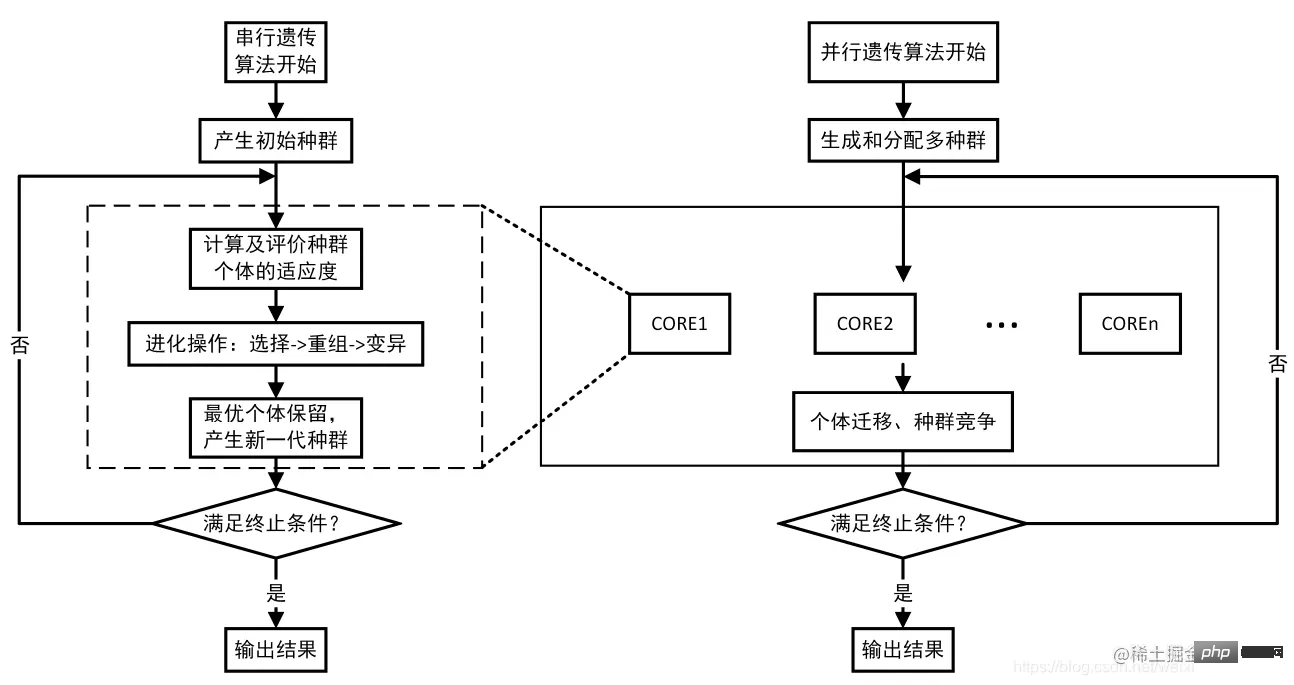
遺傳演算法是模擬生物遺傳學和自然選擇機理,透過人工方式所建構的一類搜尋演算法,從某種程度上說遺傳演算法是對生物演化過程的數學方式模擬。生物族群的生存過程普遍遵循達爾文進化準則,群體中的個體根據對環境的適應能力而被大自然所選擇或淘汰。演化過程的結果反映在個體的結構上,其染色體包含若干基因,相應的表現型和基因型的連結反映了個體的外在特性與內在機理間邏輯關係。透過個體之間的交叉、變異來適應大自然環境。生物染色體用數學方式或電腦方式來體現就是一串數碼,仍叫染色體,有時也叫個體;適應能力是對應著一個染色體的一個數值來衡量;染色體的選擇或淘汰則按所面對的問題是求最大還是最小來進行。
#二、遺傳演算法庫Geatpy
2.1 遺傳演算法工具箱Geatpy參數介紹
# API官方參考文件
population參數【重要屬性:Chrom,Phen,Objv,CV,FitnV】
- sizes : int - 族群規模,即族群的個體數目。
- ChromNum : int - 染色體的數目,即每個個體有多少染色體。
- Encoding : str - 染色體編碼方式, 'BG':二進位/格雷編碼; 'RI':實整數編碼,即實數和整數的混合編碼; 'P':排列編碼
- #Field : array - 譯碼矩陣
- Chrom : array - 族群染色體矩陣,每一行對應一個個體的一條染色體。
- Lind : int - 族群染色體長度。
- ObjV : array - 族群目標函數值矩陣,每一行對應一個個體的目標函數值,每一列對應一個目標
- FitnV : array - 族群個體適應度列向量,每個元素對應一個個體的適應度,最小適應度為0
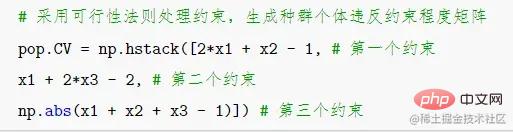
- CV : array - CV(Constraint Violation Value)是用來定量描述違反約束條件程度的矩陣,每行對應一個個體,每列對應一個限制條件
- Phen : array - 族群表現型矩陣(即族群各染色體解碼後所代表的決策變數所組成的矩陣)。
- 如果透過CV矩陣基於可行性法則進行約束的設置,那麼不等式限制需要≤,等式限制需要傳入abs( ) (因為遵循值越大,適應度越小的原則)
- ea.Problem.init()中的lbin與ubin(決策變數範圍邊界矩陣)表示範圍區間的開閉,1閉合0開區間
#Geatpy 結果參數介紹
success: True or False, 表示演算法是否成功求解。
stopMsg: 儲存著演算法停止原因的字串。
optPop: 儲存演算法求解結果的族群物件。如果無可行解,則optPop.sizes=0。 optPop.Phen為決策變數矩陣,optPop.ObjV為目標函數值矩陣。
lastPop: 演算法演化結束後的最後一代族群物件。
Vars: 等於optPop.Phen,此處即最優解。若無可行解,則Vars=None。
ObjV: 等於optPop.ObjV,此處為最優解對應的目標函數值。若無可行解,ObjV=None。
CV: 等於optPop.CV,此處即最優解對應的違反約束程度矩陣。若無可行解,CV=None。
startTime: 程式執行開始時間。
endTime: 程式執行結束時間。
executeTime: 演算法 所用時間。
nfev: 演算法評價次數
gd: (多目標最佳化且給定了理論最優解時才有) GD指標值。
igd: (多目標最佳化且給定了理論最優解時才有) IGD指標值。
hv: (多目標最佳化才有) HV指標值。
spacing: (多目標最佳化才有) Spacing指標值。
三、最佳實務
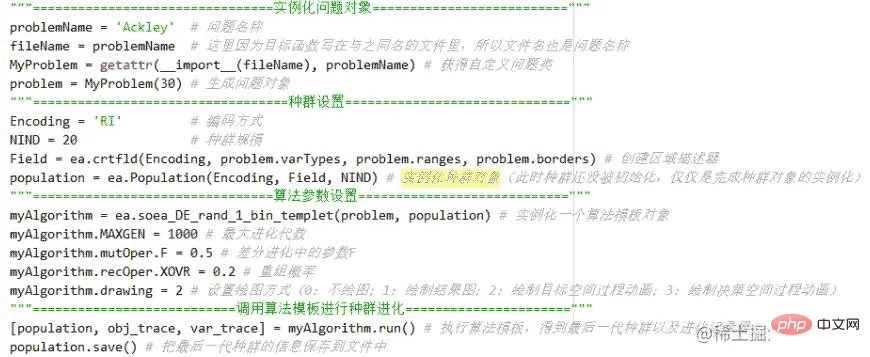
3.1 程式碼範例| 參數範本
解集:
header_regex = '|'.join(['{}'] * len(headers))
header_str = header_regex.format(*[str(key).center(width) for key, width in zip(headers, widths)])
print("=" * len(header_str))
print(header_str)
print("-" * len(header_str))
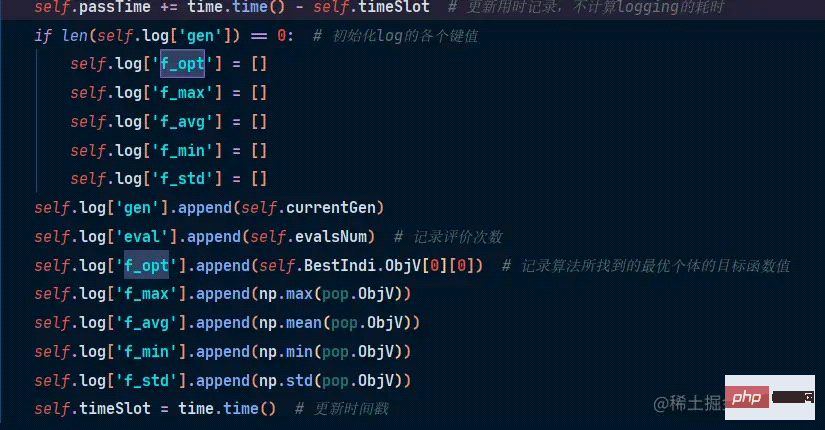
gen: 演化代數
eval:記錄評估次數
f\_opt: 當代最優個體的目標函數值 \_max=當代種群最大函數值
f\_min 最小 f\_avg : 平均水平
f\_std: 標準約束水平
import numpy as np
import geatpy as ea
class MyProblem(ea.Problem): # 继承Problem父类
def __init__(self):
name = 'Shortest_Path' # 初始化name(函数名称,可以随意设置)
M = 1 # 初始化M(目标维数)
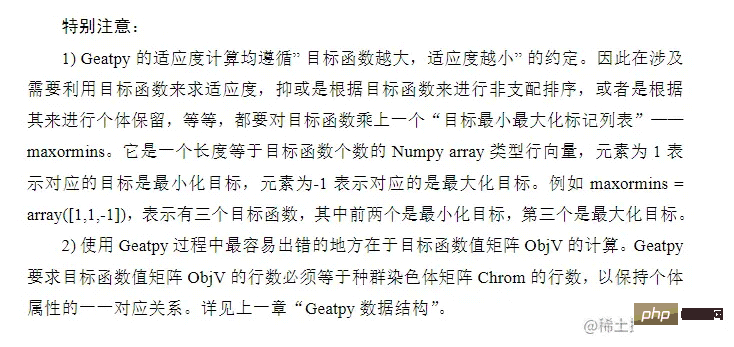
maxormins = [1] # 初始化maxormins(目标最小最大化标记列表,1:最小化该目标;-1:最大化该目标)
Dim = 10 # 初始化Dim(决策变量维数)
varTypes = [1] * Dim # 初始化varTypes(决策变量的类型,元素为0表示对应的变量是连续的;1表示是离散的)
lb = [0] * Dim # 决策变量下界
ub = [9] * Dim # 决策变量上界
lbin = [1] * Dim # 决策变量下边界 1表示闭合区间,0表示开区间
ubin = [1] * Dim # 决策变量上边界
# 调用父类构造方法完成实例化
ea.Problem.__init__(self, name, M, maxormins, Dim, varTypes, lb, ub, lbin, ubin)
# 设置每一个结点下一步可达的结点(结点从1开始数,因此列表nodes的第0号元素设为空列表表示无意义)
self.nodes = [[], [2, 3], [3, 4, 5], [5, 6], [7, 8], [4, 6], [7, 9], [8, 9], [9, 10], [10]]
# 设置有向图中各条边的权重
self.weights = {'(1, 2)': 36, '(1, 3)': 27, '(2, 4)': 18, '(2, 5)': 20, '(2, 3)': 13, '(3, 5)': 12,
'(3, 6)': 23,
'(4, 7)': 11, '(4, 8)': 32, '(5, 4)': 16, '(5, 6)': 30, '(6, 7)': 12, '(6, 9)': 38,
'(7, 8)': 20,
'(7, 9)': 32, '(8, 9)': 15, '(8, 10)': 24, '(9, 10)': 13}
def decode(self, priority): # 将优先级编码的染色体解码得到一条从节点1到节点10的可行路径
edges = [] # 存储边
path = [1] # 结点1是路径起点
while not path[-1] == 10: # 开始从起点走到终点
currentNode = path[-1] # 得到当前所在的结点编号
nextNodes = self.nodes[currentNode] # 获取下一步可达的结点组成的列表
chooseNode = nextNodes[np.argmax(
priority[np.array(nextNodes) - 1])] # 从NextNodes中选择优先级更高的结点作为下一步要访问的结点,因为结点从1数起,而下标从0数起,因此要减去1
path.append(chooseNode)
edges.append((currentNode, chooseNode))
return path, edges
def aimFunc(self, pop): # 目标函数
pop.ObjV = np.zeros((pop.sizes, 1)) # 初始化ObjV
for i in range(pop.sizes): # 遍历种群的每个个体,分别计算各个个体的目标函数值
priority = pop.Phen[i, :]
path, edges = self.decode(priority) # 将优先级编码的染色体解码得到访问路径及经过的边
pathLen = 0
for edge in edges:
key = str(edge) # 根据路径得到键值,以便根据键值找到路径对应的长度
if not key in self.weights:
raise RuntimeError("Error in aimFunc: The path is invalid. (当前路径是无效的。)", path)
pathLen += self.weights[key] # 将该段路径长度加入
pop.ObjV[i] = pathLen # 计算目标函数值,赋值给pop种群对象的ObjV属性
## 执行脚本
if __name__ == "__main__":
# 实例化问题对象
problem = MyProblem()
# 构建算法
algorithm = ea.soea_EGA_templet(problem,
ea.Population(Encoding='RI', NIND=4),
MAXGEN=10, # 最大进化代数
logTras=1) # 表示每隔多少代记录一次日志信息
# 求解
res = ea.optimize(algorithm, verbose=True, drawing=1, outputMsg=False, drawLog=False, saveFlag=True,
dirName='result')
print('最短路程为:%s' % (res['ObjV'][0][0]))
print('最佳路线为:')
best_journey, edges = problem.decode(res['Vars'][0])
for i in range(len(best_journey)):
print(int(best_journey[i]), end=' ')
print()Python3影片教學 】
以上是簡單介紹Python遺傳演算法Geatpy工具箱的詳細內容。更多資訊請關注PHP中文網其他相關文章!

熱AI工具

Undresser.AI Undress
人工智慧驅動的應用程序,用於創建逼真的裸體照片

AI Clothes Remover
用於從照片中去除衣服的線上人工智慧工具。

Undress AI Tool
免費脫衣圖片

Clothoff.io
AI脫衣器

AI Hentai Generator
免費產生 AI 無盡。

熱門文章
熱工具

記事本++7.3.1
好用且免費的程式碼編輯器

SublimeText3漢化版
中文版,非常好用

禪工作室 13.0.1
強大的PHP整合開發環境

Dreamweaver CS6
視覺化網頁開發工具

SublimeText3 Mac版
神級程式碼編輯軟體(SublimeText3)
熱門話題



 mysql 是否要付費
Apr 08, 2025 pm 05:36 PM
mysql 是否要付費
Apr 08, 2025 pm 05:36 PM
MySQL 有免費的社區版和收費的企業版。社區版可免費使用和修改,但支持有限,適合穩定性要求不高、技術能力強的應用。企業版提供全面商業支持,適合需要穩定可靠、高性能數據庫且願意為支持買單的應用。選擇版本時考慮的因素包括應用關鍵性、預算和技術技能。沒有完美的選項,只有最合適的方案,需根據具體情況謹慎選擇。
 mysql安裝後怎麼使用
Apr 08, 2025 am 11:48 AM
mysql安裝後怎麼使用
Apr 08, 2025 am 11:48 AM
文章介紹了MySQL數據庫的上手操作。首先,需安裝MySQL客戶端,如MySQLWorkbench或命令行客戶端。 1.使用mysql-uroot-p命令連接服務器,並使用root賬戶密碼登錄;2.使用CREATEDATABASE創建數據庫,USE選擇數據庫;3.使用CREATETABLE創建表,定義字段及數據類型;4.使用INSERTINTO插入數據,SELECT查詢數據,UPDATE更新數據,DELETE刪除數據。熟練掌握這些步驟,並學習處理常見問題和優化數據庫性能,才能高效使用MySQL。
 mysql下載文件損壞無法安裝的修復方案
Apr 08, 2025 am 11:21 AM
mysql下載文件損壞無法安裝的修復方案
Apr 08, 2025 am 11:21 AM
MySQL下載文件損壞,咋整?哎,下載個MySQL都能遇到文件損壞,這年頭真是不容易啊!這篇文章就來聊聊怎麼解決這個問題,讓大家少走彎路。讀完之後,你不僅能修復損壞的MySQL安裝包,還能對下載和安裝過程有更深入的理解,避免以後再踩坑。先說說為啥下載文件會損壞這原因可多了去了,網絡問題是罪魁禍首,下載過程中斷、網絡不穩定都可能導致文件損壞。還有就是下載源本身的問題,服務器文件本身就壞了,你下載下來當然也是壞的。另外,一些殺毒軟件過度“熱情”的掃描也可能造成文件損壞。診斷問題:確定文件是否真的損壞
 mySQL下載完安裝不了
Apr 08, 2025 am 11:24 AM
mySQL下載完安裝不了
Apr 08, 2025 am 11:24 AM
MySQL安裝失敗的原因主要有:1.權限問題,需以管理員身份運行或使用sudo命令;2.依賴項缺失,需安裝相關開發包;3.端口衝突,需關閉佔用3306端口的程序或修改配置文件;4.安裝包損壞,需重新下載並驗證完整性;5.環境變量配置錯誤,需根據操作系統正確配置環境變量。解決這些問題,仔細檢查每個步驟,就能順利安裝MySQL。
 MySQL安裝後服務無法啟動的解決辦法
Apr 08, 2025 am 11:18 AM
MySQL安裝後服務無法啟動的解決辦法
Apr 08, 2025 am 11:18 AM
MySQL拒啟動?別慌,咱來排查!很多朋友安裝完MySQL後,發現服務死活啟動不了,心裡那個急啊!別急,這篇文章帶你從容應對,揪出幕後黑手!讀完後,你不僅能解決這個問題,還能提升對MySQL服務的理解,以及排查問題的思路,成為一名更強大的數據庫管理員! MySQL服務啟動失敗,原因五花八門,從簡單的配置錯誤到復雜的系統問題都有可能。咱們先從最常見的幾個方面入手。基礎知識:服務啟動流程簡述MySQL服務啟動,簡單來說,就是操作系統加載MySQL相關的文件,然後啟動MySQL守護進程。這其中涉及到配置
 mysql安裝後怎麼優化數據庫性能
Apr 08, 2025 am 11:36 AM
mysql安裝後怎麼優化數據庫性能
Apr 08, 2025 am 11:36 AM
MySQL性能優化需從安裝配置、索引及查詢優化、監控與調優三個方面入手。 1.安裝後需根據服務器配置調整my.cnf文件,例如innodb_buffer_pool_size參數,並關閉query_cache_size;2.創建合適的索引,避免索引過多,並優化查詢語句,例如使用EXPLAIN命令分析執行計劃;3.利用MySQL自帶監控工具(SHOWPROCESSLIST,SHOWSTATUS)監控數據庫運行狀況,定期備份和整理數據庫。通過這些步驟,持續優化,才能提升MySQL數據庫性能。
 如何針對高負載應用程序優化 MySQL 性能?
Apr 08, 2025 pm 06:03 PM
如何針對高負載應用程序優化 MySQL 性能?
Apr 08, 2025 pm 06:03 PM
MySQL數據庫性能優化指南在資源密集型應用中,MySQL數據庫扮演著至關重要的角色,負責管理海量事務。然而,隨著應用規模的擴大,數據庫性能瓶頸往往成為製約因素。本文將探討一系列行之有效的MySQL性能優化策略,確保您的應用在高負載下依然保持高效響應。我們將結合實際案例,深入講解索引、查詢優化、數據庫設計以及緩存等關鍵技術。 1.數據庫架構設計優化合理的數據庫架構是MySQL性能優化的基石。以下是一些核心原則:選擇合適的數據類型選擇最小的、符合需求的數據類型,既能節省存儲空間,又能提升數據處理速度
 mysql 需要互聯網嗎
Apr 08, 2025 pm 02:18 PM
mysql 需要互聯網嗎
Apr 08, 2025 pm 02:18 PM
MySQL 可在無需網絡連接的情況下運行,進行基本的數據存儲和管理。但是,對於與其他系統交互、遠程訪問或使用高級功能(如復制和集群)的情況,則需要網絡連接。此外,安全措施(如防火牆)、性能優化(選擇合適的網絡連接)和數據備份對於連接到互聯網的 MySQL 數據庫至關重要。
